Note
Click here to download the full example code
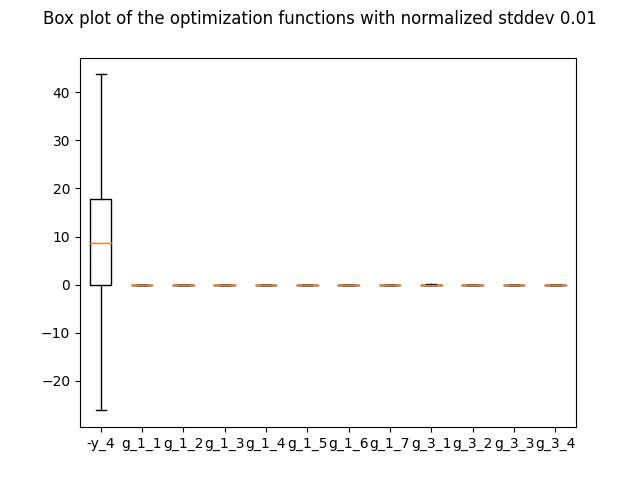
Robustness¶
In this example, we illustrate the use of the Robustness plot
on the Sobieski’s SSBJ problem.
from __future__ import division, unicode_literals
from matplotlib import pyplot as plt
Import¶
The first step is to import some functions from the API and a method to get the design space.
from gemseo.api import configure_logger, create_discipline, create_scenario
from gemseo.problems.sobieski.core import SobieskiProblem
configure_logger()
Out:
<RootLogger root (INFO)>
Create disciplines¶
Then, we instantiate the disciplines of the Sobieski’s SSBJ problem: Propulsion, Aerodynamics, Structure and Mission
disciplines = create_discipline(
[
"SobieskiPropulsion",
"SobieskiAerodynamics",
"SobieskiStructure",
"SobieskiMission",
]
)
Create design space¶
We also read the design space from the SobieskiProblem.
design_space = SobieskiProblem().read_design_space()
Create and execute scenario¶
The next step is to build an MDO scenario in order to maximize the range, encoded ‘y_4’, with respect to the design parameters, while satisfying the inequality constraints ‘g_1’, ‘g_2’ and ‘g_3’. We can use the MDF formulation, the SLSQP optimization algorithm and a maximum number of iterations equal to 100.
scenario = create_scenario(
disciplines,
formulation="MDF",
objective_name="y_4",
maximize_objective=True,
design_space=design_space,
)
scenario.set_differentiation_method("user")
for constraint in ["g_1", "g_2", "g_3"]:
scenario.add_constraint(constraint, "ineq")
scenario.execute({"algo": "SLSQP", "max_iter": 10})
Out:
INFO - 09:25:36:
INFO - 09:25:36: *** Start MDO Scenario execution ***
INFO - 09:25:36: MDOScenario
INFO - 09:25:36: Disciplines: SobieskiPropulsion SobieskiAerodynamics SobieskiStructure SobieskiMission
INFO - 09:25:36: MDOFormulation: MDF
INFO - 09:25:36: Algorithm: SLSQP
INFO - 09:25:36: Optimization problem:
INFO - 09:25:36: Minimize: -y_4(x_shared, x_1, x_2, x_3)
INFO - 09:25:36: With respect to: x_shared, x_1, x_2, x_3
INFO - 09:25:36: Subject to constraints:
INFO - 09:25:36: g_1(x_shared, x_1, x_2, x_3) <= 0.0
INFO - 09:25:36: g_2(x_shared, x_1, x_2, x_3) <= 0.0
INFO - 09:25:36: g_3(x_shared, x_1, x_2, x_3) <= 0.0
INFO - 09:25:36: Design Space:
INFO - 09:25:36: +----------+-------------+-------+-------------+-------+
INFO - 09:25:36: | name | lower_bound | value | upper_bound | type |
INFO - 09:25:36: +----------+-------------+-------+-------------+-------+
INFO - 09:25:36: | x_shared | 0.01 | 0.05 | 0.09 | float |
INFO - 09:25:36: | x_shared | 30000 | 45000 | 60000 | float |
INFO - 09:25:36: | x_shared | 1.4 | 1.6 | 1.8 | float |
INFO - 09:25:36: | x_shared | 2.5 | 5.5 | 8.5 | float |
INFO - 09:25:36: | x_shared | 40 | 55 | 70 | float |
INFO - 09:25:36: | x_shared | 500 | 1000 | 1500 | float |
INFO - 09:25:36: | x_1 | 0.1 | 0.25 | 0.4 | float |
INFO - 09:25:36: | x_1 | 0.75 | 1 | 1.25 | float |
INFO - 09:25:36: | x_2 | 0.75 | 1 | 1.25 | float |
INFO - 09:25:36: | x_3 | 0.1 | 0.5 | 1 | float |
INFO - 09:25:36: +----------+-------------+-------+-------------+-------+
INFO - 09:25:36: Optimization: 0%| | 0/10 [00:00<?, ?it]
INFO - 09:25:37: Optimization: 20%|██ | 2/10 [00:00<00:00, 67.35 it/sec, obj=536]
INFO - 09:25:37: Optimization: 40%|████ | 4/10 [00:00<00:00, 21.69 it/sec, obj=3.8e+3]
WARNING - 09:25:37: Optimization found no feasible point ! The least infeasible point is selected.
INFO - 09:25:37: Optimization: 40%|████ | 4/10 [00:00<00:00, 16.24 it/sec, obj=3.96e+3]
INFO - 09:25:37: Optimization result:
INFO - 09:25:37: Objective value = 3795.0851933441872
INFO - 09:25:37: The result is not feasible.
INFO - 09:25:37: Status: 8
INFO - 09:25:37: Optimizer message: Positive directional derivative for linesearch
INFO - 09:25:37: Number of calls to the objective function by the optimizer: 5
INFO - 09:25:37: Constraints values w.r.t. 0:
INFO - 09:25:37: g_1 = [-0.01940553 -0.03430815 -0.04499528 -0.05244303 -0.05783964 -0.13706197
INFO - 09:25:37: -0.10293803]
INFO - 09:25:37: g_2 = 0.0003917260521535404
INFO - 09:25:37: g_3 = [-0.6301543 -0.3698457 -0.14096439 -0.18315803]
INFO - 09:25:37: Design Space:
INFO - 09:25:37: +----------+-------------+---------------------+-------------+-------+
INFO - 09:25:37: | name | lower_bound | value | upper_bound | type |
INFO - 09:25:37: +----------+-------------+---------------------+-------------+-------+
INFO - 09:25:37: | x_shared | 0.01 | 0.06009793151303839 | 0.09 | float |
INFO - 09:25:37: | x_shared | 30000 | 60000 | 60000 | float |
INFO - 09:25:37: | x_shared | 1.4 | 1.400744940049757 | 1.8 | float |
INFO - 09:25:37: | x_shared | 2.5 | 2.5 | 8.5 | float |
INFO - 09:25:37: | x_shared | 40 | 70 | 70 | float |
INFO - 09:25:37: | x_shared | 500 | 1500 | 1500 | float |
INFO - 09:25:37: | x_1 | 0.1 | 0.3991428961174674 | 0.4 | float |
INFO - 09:25:37: | x_1 | 0.75 | 0.75 | 1.25 | float |
INFO - 09:25:37: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 09:25:37: | x_3 | 0.1 | 0.1343078243802689 | 1 | float |
INFO - 09:25:37: +----------+-------------+---------------------+-------------+-------+
INFO - 09:25:37: *** MDO Scenario run terminated in 0:00:00.631962 ***
{'algo': 'SLSQP', 'max_iter': 10}
Post-process scenario¶
Lastly, we post-process the scenario by means of the Robustness
plot which performs a quadratic approximation from an optimization history,
and plot the results as cuts of the approximation computes the quadratic
approximations of all the output functions, propagate analytically a normal
distribution centered on the optimal design variable with a standard
deviation which is a percentage of the mean passed in option (default: 1%)
and plot the corresponding output boxplot. plots any of the constraint or
objective functions w.r.t. optimization iterations or sampling snapshots.
scenario.post_process("Robustness", save=False, show=False)
# Workaround for HTML rendering, instead of ``show=True``
plt.show()
Total running time of the script: ( 0 minutes 0.898 seconds)