Note
Go to the end to download the full example code.
Calibration of a polynomial regression#
from __future__ import annotations
import matplotlib.pyplot as plt
from matplotlib.tri import Triangulation
from gemseo import configure_logger
from gemseo.algos.design_space import DesignSpace
from gemseo.mlearning.core.calibration import MLAlgoCalibration
from gemseo.mlearning.regression.quality.mse_measure import MSEMeasure
from gemseo.problems.dataset.rosenbrock import create_rosenbrock_dataset
Load the dataset#
dataset = create_rosenbrock_dataset(opt_naming=False, n_samples=25)
Define the measure#
configure_logger()
test_dataset = create_rosenbrock_dataset(opt_naming=False)
measure_evaluation_method_name = "TEST"
measure_options = {"test_data": test_dataset}
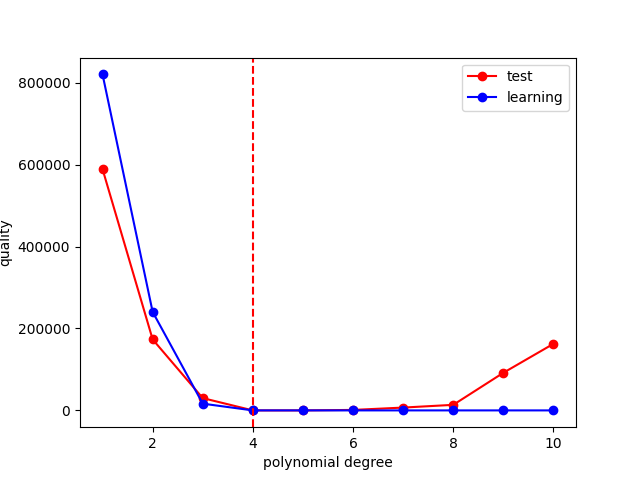
Calibrate the degree of the polynomial regression#
Define and execute the calibration#
calibration_space = DesignSpace()
calibration_space.add_variable("degree", 1, "integer", 1, 10, 1)
calibration = MLAlgoCalibration(
"PolynomialRegressor",
dataset,
["degree"],
calibration_space,
MSEMeasure,
measure_evaluation_method_name=measure_evaluation_method_name,
measure_options=measure_options,
)
calibration.execute(algo_name="PYDOE_FULLFACT", n_samples=10)
x_opt = calibration.optimal_parameters
f_opt = calibration.optimal_criterion
degree = x_opt["degree"][0]
f"optimal degree = {degree}; optimal criterion = {f_opt}"
INFO - 20:34:51: *** Start DOEScenario execution ***
INFO - 20:34:51: DOEScenario
INFO - 20:34:51: Disciplines: MLAlgoAssessor
INFO - 20:34:51: MDO formulation: DisciplinaryOpt
INFO - 20:34:51: Optimization problem:
INFO - 20:34:51: minimize criterion(degree)
INFO - 20:34:51: with respect to degree
INFO - 20:34:51: over the design space:
INFO - 20:34:51: +--------+-------------+-------+-------------+---------+
INFO - 20:34:51: | Name | Lower bound | Value | Upper bound | Type |
INFO - 20:34:51: +--------+-------------+-------+-------------+---------+
INFO - 20:34:51: | degree | 1 | 1 | 10 | integer |
INFO - 20:34:51: +--------+-------------+-------+-------------+---------+
INFO - 20:34:51: Solving optimization problem with algorithm PYDOE_FULLFACT:
INFO - 20:34:51: 10%|█ | 1/10 [00:00<00:00, 35.88 it/sec, obj=5.89e+5]
INFO - 20:34:51: 20%|██ | 2/10 [00:00<00:00, 58.35 it/sec, obj=1.73e+5]
INFO - 20:34:51: 30%|███ | 3/10 [00:00<00:00, 73.96 it/sec, obj=3e+4]
INFO - 20:34:51: 40%|████ | 4/10 [00:00<00:00, 85.53 it/sec, obj=1.1e-24]
INFO - 20:34:51: 50%|█████ | 5/10 [00:00<00:00, 94.32 it/sec, obj=0.11]
INFO - 20:34:51: 60%|██████ | 6/10 [00:00<00:00, 101.09 it/sec, obj=1.18e+3]
INFO - 20:34:51: 70%|███████ | 7/10 [00:00<00:00, 106.57 it/sec, obj=6.9e+3]
INFO - 20:34:51: 80%|████████ | 8/10 [00:00<00:00, 111.16 it/sec, obj=1.36e+4]
INFO - 20:34:51: 90%|█████████ | 9/10 [00:00<00:00, 114.76 it/sec, obj=9.18e+4]
INFO - 20:34:51: 100%|██████████| 10/10 [00:00<00:00, 117.81 it/sec, obj=1.63e+5]
INFO - 20:34:51: Optimization result:
INFO - 20:34:51: Optimizer info:
INFO - 20:34:51: Status: None
INFO - 20:34:51: Message: None
INFO - 20:34:51: Number of calls to the objective function by the optimizer: 0
INFO - 20:34:51: Solution:
INFO - 20:34:51: Objective: 1.0957626812742524e-24
INFO - 20:34:51: Design space:
INFO - 20:34:51: +--------+-------------+-------+-------------+---------+
INFO - 20:34:51: | Name | Lower bound | Value | Upper bound | Type |
INFO - 20:34:51: +--------+-------------+-------+-------------+---------+
INFO - 20:34:51: | degree | 1 | 4 | 10 | integer |
INFO - 20:34:51: +--------+-------------+-------+-------------+---------+
INFO - 20:34:51: *** End DOEScenario execution ***
'optimal degree = 4; optimal criterion = 1.0957626812742524e-24'
Get the history#
calibration.dataset
Visualize the results#
degree = calibration.get_history("degree")
criterion = calibration.get_history("criterion")
learning = calibration.get_history("learning")
plt.plot(degree, criterion, "-o", label="test", color="red")
plt.plot(degree, learning, "-o", label="learning", color="blue")
plt.xlabel("polynomial degree")
plt.ylabel("quality")
plt.axvline(x_opt["degree"], color="red", ls="--")
plt.legend()
plt.show()
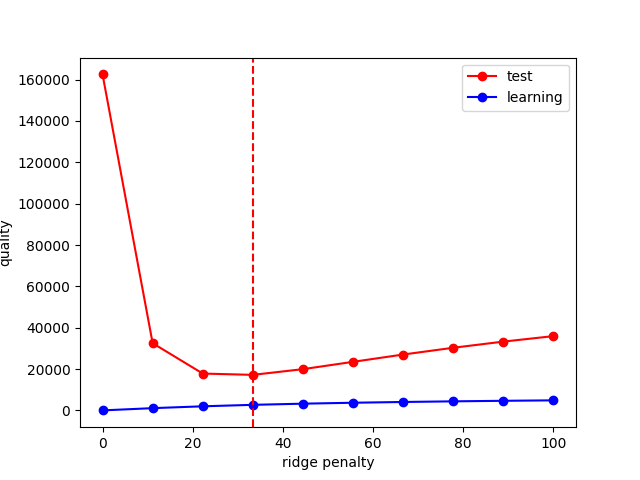
Calibrate the ridge penalty of the polynomial regression#
Define and execute the calibration#
calibration_space = DesignSpace()
calibration_space.add_variable("penalty_level", 1, "float", 0.0, 100.0, 0.0)
calibration = MLAlgoCalibration(
"PolynomialRegressor",
dataset,
["penalty_level"],
calibration_space,
MSEMeasure,
measure_evaluation_method_name=measure_evaluation_method_name,
measure_options=measure_options,
degree=10,
)
calibration.execute(algo_name="PYDOE_FULLFACT", n_samples=10)
x_opt = calibration.optimal_parameters
f_opt = calibration.optimal_criterion
x_opt["penalty_level"][0], f_opt
INFO - 20:34:51: *** Start DOEScenario execution ***
INFO - 20:34:51: DOEScenario
INFO - 20:34:51: Disciplines: MLAlgoAssessor
INFO - 20:34:51: MDO formulation: DisciplinaryOpt
INFO - 20:34:51: Optimization problem:
INFO - 20:34:51: minimize criterion(penalty_level)
INFO - 20:34:51: with respect to penalty_level
INFO - 20:34:51: over the design space:
INFO - 20:34:51: +---------------+-------------+-------+-------------+-------+
INFO - 20:34:51: | Name | Lower bound | Value | Upper bound | Type |
INFO - 20:34:51: +---------------+-------------+-------+-------------+-------+
INFO - 20:34:51: | penalty_level | 0 | 0 | 100 | float |
INFO - 20:34:51: +---------------+-------------+-------+-------------+-------+
INFO - 20:34:51: Solving optimization problem with algorithm PYDOE_FULLFACT:
INFO - 20:34:51: 10%|█ | 1/10 [00:00<00:00, 104.05 it/sec, obj=1.63e+5]
INFO - 20:34:51: 20%|██ | 2/10 [00:00<00:00, 119.43 it/sec, obj=3.25e+4]
INFO - 20:34:51: 30%|███ | 3/10 [00:00<00:00, 128.31 it/sec, obj=1.78e+4]
INFO - 20:34:51: 40%|████ | 4/10 [00:00<00:00, 133.31 it/sec, obj=1.72e+4]
INFO - 20:34:51: 50%|█████ | 5/10 [00:00<00:00, 136.19 it/sec, obj=2e+4]
INFO - 20:34:51: 60%|██████ | 6/10 [00:00<00:00, 138.16 it/sec, obj=2.35e+4]
INFO - 20:34:51: 70%|███████ | 7/10 [00:00<00:00, 138.98 it/sec, obj=2.7e+4]
INFO - 20:34:51: 80%|████████ | 8/10 [00:00<00:00, 140.14 it/sec, obj=3.03e+4]
INFO - 20:34:51: 90%|█████████ | 9/10 [00:00<00:00, 140.74 it/sec, obj=3.33e+4]
INFO - 20:34:51: 100%|██████████| 10/10 [00:00<00:00, 141.25 it/sec, obj=3.59e+4]
INFO - 20:34:51: Optimization result:
INFO - 20:34:51: Optimizer info:
INFO - 20:34:51: Status: None
INFO - 20:34:51: Message: None
INFO - 20:34:51: Number of calls to the objective function by the optimizer: 0
INFO - 20:34:51: Solution:
INFO - 20:34:51: Objective: 17189.52649297074
INFO - 20:34:51: Design space:
INFO - 20:34:51: +---------------+-------------+-------------------+-------------+-------+
INFO - 20:34:51: | Name | Lower bound | Value | Upper bound | Type |
INFO - 20:34:51: +---------------+-------------+-------------------+-------------+-------+
INFO - 20:34:51: | penalty_level | 0 | 33.33333333333333 | 100 | float |
INFO - 20:34:51: +---------------+-------------+-------------------+-------------+-------+
INFO - 20:34:51: *** End DOEScenario execution ***
(np.float64(33.33333333333333), np.float64(17189.52649297074))
Get the history#
calibration.dataset
Visualize the results#
penalty_level = calibration.get_history("penalty_level")
criterion = calibration.get_history("criterion")
learning = calibration.get_history("learning")
plt.plot(penalty_level, criterion, "-o", label="test", color="red")
plt.plot(penalty_level, learning, "-o", label="learning", color="blue")
plt.axvline(x_opt["penalty_level"], color="red", ls="--")
plt.xlabel("ridge penalty")
plt.ylabel("quality")
plt.legend()
plt.show()
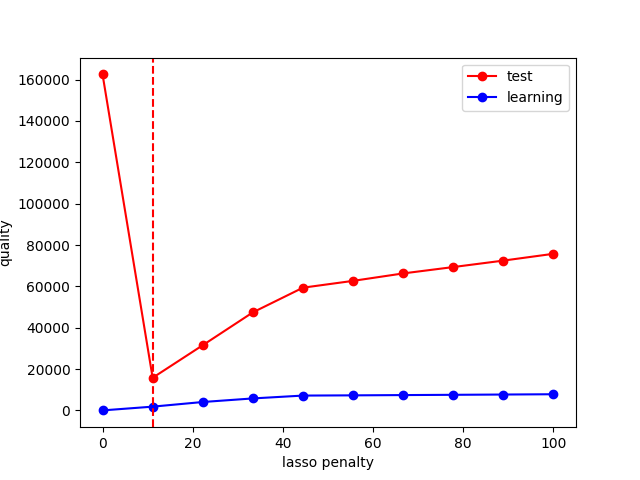
Calibrate the lasso penalty of the polynomial regression#
Define and execute the calibration#
calibration_space = DesignSpace()
calibration_space.add_variable("penalty_level", 1, "float", 0.0, 100.0, 0.0)
calibration = MLAlgoCalibration(
"PolynomialRegressor",
dataset,
["penalty_level"],
calibration_space,
MSEMeasure,
measure_evaluation_method_name=measure_evaluation_method_name,
measure_options=measure_options,
degree=10,
l2_penalty_ratio=0.0,
)
calibration.execute(algo_name="PYDOE_FULLFACT", n_samples=10)
x_opt = calibration.optimal_parameters
f_opt = calibration.optimal_criterion
x_opt["penalty_level"][0], f_opt
INFO - 20:34:51: *** Start DOEScenario execution ***
INFO - 20:34:51: DOEScenario
INFO - 20:34:51: Disciplines: MLAlgoAssessor
INFO - 20:34:51: MDO formulation: DisciplinaryOpt
INFO - 20:34:51: Optimization problem:
INFO - 20:34:51: minimize criterion(penalty_level)
INFO - 20:34:51: with respect to penalty_level
INFO - 20:34:51: over the design space:
INFO - 20:34:51: +---------------+-------------+-------+-------------+-------+
INFO - 20:34:51: | Name | Lower bound | Value | Upper bound | Type |
INFO - 20:34:51: +---------------+-------------+-------+-------------+-------+
INFO - 20:34:51: | penalty_level | 0 | 0 | 100 | float |
INFO - 20:34:51: +---------------+-------------+-------+-------------+-------+
INFO - 20:34:51: Solving optimization problem with algorithm PYDOE_FULLFACT:
INFO - 20:34:51: 10%|█ | 1/10 [00:00<00:00, 106.88 it/sec, obj=1.63e+5]
INFO - 20:34:51: 20%|██ | 2/10 [00:00<00:00, 111.15 it/sec, obj=1.58e+4]
INFO - 20:34:51: 30%|███ | 3/10 [00:00<00:00, 114.49 it/sec, obj=3.15e+4]
INFO - 20:34:51: 40%|████ | 4/10 [00:00<00:00, 116.68 it/sec, obj=4.74e+4]
INFO - 20:34:51: 50%|█████ | 5/10 [00:00<00:00, 118.31 it/sec, obj=5.94e+4]
INFO - 20:34:51: 60%|██████ | 6/10 [00:00<00:00, 119.30 it/sec, obj=6.27e+4]
INFO - 20:34:51: 70%|███████ | 7/10 [00:00<00:00, 120.01 it/sec, obj=6.63e+4]
INFO - 20:34:51: 80%|████████ | 8/10 [00:00<00:00, 120.26 it/sec, obj=6.93e+4]
INFO - 20:34:51: 90%|█████████ | 9/10 [00:00<00:00, 116.13 it/sec, obj=7.25e+4]
INFO - 20:34:51: 100%|██████████| 10/10 [00:00<00:00, 116.66 it/sec, obj=7.57e+4]
INFO - 20:34:51: Optimization result:
INFO - 20:34:51: Optimizer info:
INFO - 20:34:51: Status: None
INFO - 20:34:51: Message: None
INFO - 20:34:51: Number of calls to the objective function by the optimizer: 0
INFO - 20:34:51: Solution:
INFO - 20:34:51: Objective: 15775.989581125898
INFO - 20:34:51: Design space:
INFO - 20:34:51: +---------------+-------------+-------------------+-------------+-------+
INFO - 20:34:51: | Name | Lower bound | Value | Upper bound | Type |
INFO - 20:34:51: +---------------+-------------+-------------------+-------------+-------+
INFO - 20:34:51: | penalty_level | 0 | 11.11111111111111 | 100 | float |
INFO - 20:34:51: +---------------+-------------+-------------------+-------------+-------+
INFO - 20:34:51: *** End DOEScenario execution ***
(np.float64(11.11111111111111), np.float64(15775.989581125898))
Get the history#
calibration.dataset
Visualize the results#
penalty_level = calibration.get_history("penalty_level")
criterion = calibration.get_history("criterion")
learning = calibration.get_history("learning")
plt.plot(penalty_level, criterion, "-o", label="test", color="red")
plt.plot(penalty_level, learning, "-o", label="learning", color="blue")
plt.axvline(x_opt["penalty_level"], color="red", ls="--")
plt.xlabel("lasso penalty")
plt.ylabel("quality")
plt.legend()
plt.show()
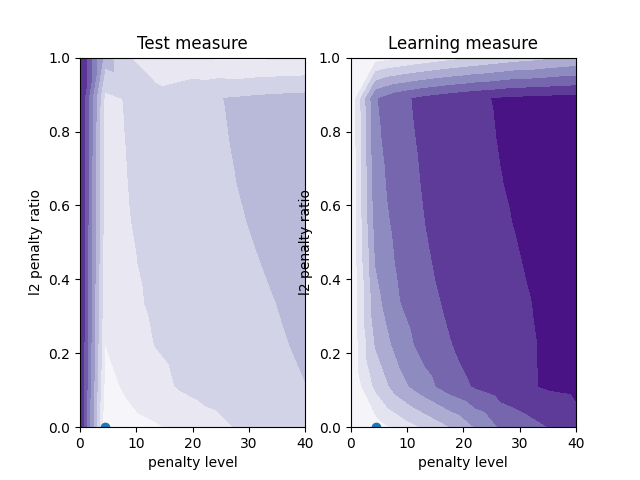
Calibrate the elasticnet penalty of the polynomial regression#
Define and execute the calibration#
calibration_space = DesignSpace()
calibration_space.add_variable("penalty_level", 1, "float", 0.0, 40.0, 0.0)
calibration_space.add_variable("l2_penalty_ratio", 1, "float", 0.0, 1.0, 0.5)
calibration = MLAlgoCalibration(
"PolynomialRegressor",
dataset,
["penalty_level", "l2_penalty_ratio"],
calibration_space,
MSEMeasure,
measure_evaluation_method_name=measure_evaluation_method_name,
measure_options=measure_options,
degree=10,
)
calibration.execute(algo_name="PYDOE_FULLFACT", n_samples=100)
x_opt = calibration.optimal_parameters
f_opt = calibration.optimal_criterion
x_opt["penalty_level"][0], x_opt["l2_penalty_ratio"][0], f_opt
INFO - 20:34:51: *** Start DOEScenario execution ***
INFO - 20:34:51: DOEScenario
INFO - 20:34:51: Disciplines: MLAlgoAssessor
INFO - 20:34:51: MDO formulation: DisciplinaryOpt
INFO - 20:34:51: Optimization problem:
INFO - 20:34:51: minimize criterion(penalty_level, l2_penalty_ratio)
INFO - 20:34:51: with respect to l2_penalty_ratio, penalty_level
INFO - 20:34:51: over the design space:
INFO - 20:34:51: +------------------+-------------+-------+-------------+-------+
INFO - 20:34:51: | Name | Lower bound | Value | Upper bound | Type |
INFO - 20:34:51: +------------------+-------------+-------+-------------+-------+
INFO - 20:34:51: | penalty_level | 0 | 0 | 40 | float |
INFO - 20:34:51: | l2_penalty_ratio | 0 | 0.5 | 1 | float |
INFO - 20:34:51: +------------------+-------------+-------+-------------+-------+
INFO - 20:34:51: Solving optimization problem with algorithm PYDOE_FULLFACT:
INFO - 20:34:51: 1%| | 1/100 [00:00<00:00, 110.12 it/sec, obj=1.63e+5]
INFO - 20:34:51: 2%|▏ | 2/100 [00:00<00:00, 115.50 it/sec, obj=4.14e+3]
INFO - 20:34:51: 3%|▎ | 3/100 [00:00<00:00, 118.33 it/sec, obj=1.34e+4]
INFO - 20:34:51: 4%|▍ | 4/100 [00:00<00:00, 118.66 it/sec, obj=1.79e+4]
INFO - 20:34:51: 5%|▌ | 5/100 [00:00<00:00, 119.99 it/sec, obj=2.39e+4]
INFO - 20:34:51: 6%|▌ | 6/100 [00:00<00:00, 121.04 it/sec, obj=3.15e+4]
INFO - 20:34:51: 7%|▋ | 7/100 [00:00<00:00, 121.81 it/sec, obj=3.91e+4]
INFO - 20:34:51: 8%|▊ | 8/100 [00:00<00:00, 122.37 it/sec, obj=4.5e+4]
INFO - 20:34:51: 9%|▉ | 9/100 [00:00<00:00, 122.67 it/sec, obj=4.95e+4]
INFO - 20:34:51: 10%|█ | 10/100 [00:00<00:00, 123.08 it/sec, obj=5.42e+4]
INFO - 20:34:51: 11%|█ | 11/100 [00:00<00:00, 125.71 it/sec, obj=1.63e+5]
INFO - 20:34:51: 12%|█▏ | 12/100 [00:00<00:00, 124.66 it/sec, obj=1.35e+4]
INFO - 20:34:51: 13%|█▎ | 13/100 [00:00<00:00, 123.95 it/sec, obj=2.44e+4]
INFO - 20:34:51: 14%|█▍ | 14/100 [00:00<00:00, 123.64 it/sec, obj=3.28e+4]
INFO - 20:34:51: 15%|█▌ | 15/100 [00:00<00:00, 123.51 it/sec, obj=4.19e+4]
INFO - 20:34:51: 16%|█▌ | 16/100 [00:00<00:00, 123.32 it/sec, obj=4.76e+4]
INFO - 20:34:51: 17%|█▋ | 17/100 [00:00<00:00, 123.20 it/sec, obj=5.16e+4]
INFO - 20:34:51: 18%|█▊ | 18/100 [00:00<00:00, 123.20 it/sec, obj=5.52e+4]
INFO - 20:34:51: 19%|█▉ | 19/100 [00:00<00:00, 123.36 it/sec, obj=5.78e+4]
INFO - 20:34:51: 20%|██ | 20/100 [00:00<00:00, 123.48 it/sec, obj=5.98e+4]
INFO - 20:34:51: 21%|██ | 21/100 [00:00<00:00, 124.74 it/sec, obj=1.63e+5]
INFO - 20:34:51: 22%|██▏ | 22/100 [00:00<00:00, 124.56 it/sec, obj=1.97e+4]
INFO - 20:34:51: 23%|██▎ | 23/100 [00:00<00:00, 124.35 it/sec, obj=3.17e+4]
INFO - 20:34:51: 24%|██▍ | 24/100 [00:00<00:00, 124.31 it/sec, obj=4.02e+4]
INFO - 20:34:51: 25%|██▌ | 25/100 [00:00<00:00, 124.32 it/sec, obj=4.59e+4]
INFO - 20:34:51: 26%|██▌ | 26/100 [00:00<00:00, 124.37 it/sec, obj=4.97e+4]
INFO - 20:34:51: 27%|██▋ | 27/100 [00:00<00:00, 124.43 it/sec, obj=5.3e+4]
INFO - 20:34:51: 28%|██▊ | 28/100 [00:00<00:00, 124.43 it/sec, obj=5.6e+4]
INFO - 20:34:51: 29%|██▉ | 29/100 [00:00<00:00, 124.46 it/sec, obj=5.89e+4]
INFO - 20:34:51: 30%|███ | 30/100 [00:00<00:00, 124.56 it/sec, obj=6.18e+4]
INFO - 20:34:51: 31%|███ | 31/100 [00:00<00:00, 125.47 it/sec, obj=1.63e+5]
INFO - 20:34:51: 32%|███▏ | 32/100 [00:00<00:00, 125.37 it/sec, obj=2.43e+4]
INFO - 20:34:51: 33%|███▎ | 33/100 [00:00<00:00, 125.30 it/sec, obj=3.58e+4]
INFO - 20:34:52: 34%|███▍ | 34/100 [00:00<00:00, 125.27 it/sec, obj=4.29e+4]
INFO - 20:34:52: 35%|███▌ | 35/100 [00:00<00:00, 125.24 it/sec, obj=4.77e+4]
INFO - 20:34:52: 36%|███▌ | 36/100 [00:00<00:00, 125.21 it/sec, obj=5.12e+4]
INFO - 20:34:52: 37%|███▋ | 37/100 [00:00<00:00, 125.16 it/sec, obj=5.43e+4]
INFO - 20:34:52: 38%|███▊ | 38/100 [00:00<00:00, 125.04 it/sec, obj=5.74e+4]
INFO - 20:34:52: 39%|███▉ | 39/100 [00:00<00:00, 124.97 it/sec, obj=6.05e+4]
INFO - 20:34:52: 40%|████ | 40/100 [00:00<00:00, 123.94 it/sec, obj=6.35e+4]
INFO - 20:34:52: 41%|████ | 41/100 [00:00<00:00, 124.51 it/sec, obj=1.63e+5]
INFO - 20:34:52: 42%|████▏ | 42/100 [00:00<00:00, 124.22 it/sec, obj=2.75e+4]
INFO - 20:34:52: 43%|████▎ | 43/100 [00:00<00:00, 124.05 it/sec, obj=3.82e+4]
INFO - 20:34:52: 44%|████▍ | 44/100 [00:00<00:00, 123.95 it/sec, obj=4.42e+4]
INFO - 20:34:52: 45%|████▌ | 45/100 [00:00<00:00, 123.90 it/sec, obj=4.9e+4]
INFO - 20:34:52: 46%|████▌ | 46/100 [00:00<00:00, 123.86 it/sec, obj=5.28e+4]
INFO - 20:34:52: 47%|████▋ | 47/100 [00:00<00:00, 123.86 it/sec, obj=5.61e+4]
INFO - 20:34:52: 48%|████▊ | 48/100 [00:00<00:00, 123.86 it/sec, obj=5.93e+4]
INFO - 20:34:52: 49%|████▉ | 49/100 [00:00<00:00, 123.88 it/sec, obj=6.24e+4]
INFO - 20:34:52: 50%|█████ | 50/100 [00:00<00:00, 123.92 it/sec, obj=6.54e+4]
INFO - 20:34:52: 51%|█████ | 51/100 [00:00<00:00, 124.44 it/sec, obj=1.63e+5]
INFO - 20:34:52: 52%|█████▏ | 52/100 [00:00<00:00, 124.36 it/sec, obj=2.99e+4]
INFO - 20:34:52: 53%|█████▎ | 53/100 [00:00<00:00, 124.26 it/sec, obj=3.96e+4]
INFO - 20:34:52: 54%|█████▍ | 54/100 [00:00<00:00, 124.19 it/sec, obj=4.51e+4]
INFO - 20:34:52: 55%|█████▌ | 55/100 [00:00<00:00, 124.13 it/sec, obj=5e+4]
INFO - 20:34:52: 56%|█████▌ | 56/100 [00:00<00:00, 124.10 it/sec, obj=5.43e+4]
INFO - 20:34:52: 57%|█████▋ | 57/100 [00:00<00:00, 124.04 it/sec, obj=5.78e+4]
INFO - 20:34:52: 58%|█████▊ | 58/100 [00:00<00:00, 124.05 it/sec, obj=6.11e+4]
INFO - 20:34:52: 59%|█████▉ | 59/100 [00:00<00:00, 124.05 it/sec, obj=6.41e+4]
INFO - 20:34:52: 60%|██████ | 60/100 [00:00<00:00, 124.07 it/sec, obj=6.66e+4]
INFO - 20:34:52: 61%|██████ | 61/100 [00:00<00:00, 124.50 it/sec, obj=1.63e+5]
INFO - 20:34:52: 62%|██████▏ | 62/100 [00:00<00:00, 124.42 it/sec, obj=3.18e+4]
INFO - 20:34:52: 63%|██████▎ | 63/100 [00:00<00:00, 124.34 it/sec, obj=4.07e+4]
INFO - 20:34:52: 64%|██████▍ | 64/100 [00:00<00:00, 124.30 it/sec, obj=4.6e+4]
INFO - 20:34:52: 65%|██████▌ | 65/100 [00:00<00:00, 124.21 it/sec, obj=5.09e+4]
INFO - 20:34:52: 66%|██████▌ | 66/100 [00:00<00:00, 124.14 it/sec, obj=5.53e+4]
INFO - 20:34:52: 67%|██████▋ | 67/100 [00:00<00:00, 124.09 it/sec, obj=5.92e+4]
INFO - 20:34:52: 68%|██████▊ | 68/100 [00:00<00:00, 124.05 it/sec, obj=6.25e+4]
INFO - 20:34:52: 69%|██████▉ | 69/100 [00:00<00:00, 124.04 it/sec, obj=6.52e+4]
INFO - 20:34:52: 70%|███████ | 70/100 [00:00<00:00, 124.00 it/sec, obj=6.71e+4]
INFO - 20:34:52: 71%|███████ | 71/100 [00:00<00:00, 124.40 it/sec, obj=1.63e+5]
INFO - 20:34:52: 72%|███████▏ | 72/100 [00:00<00:00, 124.34 it/sec, obj=3.32e+4]
INFO - 20:34:52: 73%|███████▎ | 73/100 [00:00<00:00, 124.30 it/sec, obj=4.15e+4]
INFO - 20:34:52: 74%|███████▍ | 74/100 [00:00<00:00, 124.27 it/sec, obj=4.69e+4]
INFO - 20:34:52: 75%|███████▌ | 75/100 [00:00<00:00, 124.21 it/sec, obj=5.19e+4]
INFO - 20:34:52: 76%|███████▌ | 76/100 [00:00<00:00, 124.16 it/sec, obj=5.63e+4]
INFO - 20:34:52: 77%|███████▋ | 77/100 [00:00<00:00, 124.14 it/sec, obj=6.01e+4]
INFO - 20:34:52: 78%|███████▊ | 78/100 [00:00<00:00, 124.11 it/sec, obj=6.32e+4]
INFO - 20:34:52: 79%|███████▉ | 79/100 [00:00<00:00, 124.08 it/sec, obj=6.55e+4]
INFO - 20:34:52: 80%|████████ | 80/100 [00:00<00:00, 124.08 it/sec, obj=6.72e+4]
INFO - 20:34:52: 81%|████████ | 81/100 [00:00<00:00, 124.43 it/sec, obj=1.63e+5]
INFO - 20:34:52: 82%|████████▏ | 82/100 [00:00<00:00, 124.37 it/sec, obj=3.44e+4]
INFO - 20:34:52: 83%|████████▎ | 83/100 [00:00<00:00, 124.34 it/sec, obj=4.23e+4]
INFO - 20:34:52: 84%|████████▍ | 84/100 [00:00<00:00, 124.29 it/sec, obj=4.78e+4]
INFO - 20:34:52: 85%|████████▌ | 85/100 [00:00<00:00, 124.25 it/sec, obj=5.3e+4]
INFO - 20:34:52: 86%|████████▌ | 86/100 [00:00<00:00, 124.22 it/sec, obj=5.74e+4]
INFO - 20:34:52: 87%|████████▋ | 87/100 [00:00<00:00, 124.18 it/sec, obj=6.09e+4]
INFO - 20:34:52: 88%|████████▊ | 88/100 [00:00<00:00, 124.14 it/sec, obj=6.35e+4]
INFO - 20:34:52: 89%|████████▉ | 89/100 [00:00<00:00, 124.08 it/sec, obj=6.53e+4]
INFO - 20:34:52: 90%|█████████ | 90/100 [00:00<00:00, 124.02 it/sec, obj=6.67e+4]
INFO - 20:34:52: 91%|█████████ | 91/100 [00:00<00:00, 124.28 it/sec, obj=1.63e+5]
INFO - 20:34:52: 92%|█████████▏| 92/100 [00:00<00:00, 124.51 it/sec, obj=6.89e+4]
INFO - 20:34:52: 93%|█████████▎| 93/100 [00:00<00:00, 124.78 it/sec, obj=4.03e+4]
INFO - 20:34:52: 94%|█████████▍| 94/100 [00:00<00:00, 125.08 it/sec, obj=2.71e+4]
INFO - 20:34:52: 95%|█████████▌| 95/100 [00:00<00:00, 125.38 it/sec, obj=2.07e+4]
INFO - 20:34:52: 96%|█████████▌| 96/100 [00:00<00:00, 125.68 it/sec, obj=1.78e+4]
INFO - 20:34:52: 97%|█████████▋| 97/100 [00:00<00:00, 125.94 it/sec, obj=1.68e+4]
INFO - 20:34:52: 98%|█████████▊| 98/100 [00:00<00:00, 126.24 it/sec, obj=1.69e+4]
INFO - 20:34:52: 99%|█████████▉| 99/100 [00:00<00:00, 126.53 it/sec, obj=1.76e+4]
INFO - 20:34:52: 100%|██████████| 100/100 [00:00<00:00, 126.81 it/sec, obj=1.87e+4]
INFO - 20:34:52: Optimization result:
INFO - 20:34:52: Optimizer info:
INFO - 20:34:52: Status: None
INFO - 20:34:52: Message: None
INFO - 20:34:52: Number of calls to the objective function by the optimizer: 0
INFO - 20:34:52: Solution:
INFO - 20:34:52: Objective: 4136.820826715568
INFO - 20:34:52: Design space:
INFO - 20:34:52: +------------------+-------------+-------------------+-------------+-------+
INFO - 20:34:52: | Name | Lower bound | Value | Upper bound | Type |
INFO - 20:34:52: +------------------+-------------+-------------------+-------------+-------+
INFO - 20:34:52: | penalty_level | 0 | 4.444444444444445 | 40 | float |
INFO - 20:34:52: | l2_penalty_ratio | 0 | 0 | 1 | float |
INFO - 20:34:52: +------------------+-------------+-------------------+-------------+-------+
INFO - 20:34:52: *** End DOEScenario execution ***
(np.float64(4.444444444444445), np.float64(0.0), np.float64(4136.820826715568))
Get the history#
calibration.dataset
Visualize the results#
penalty_level = calibration.get_history("penalty_level").flatten()
l2_penalty_ratio = calibration.get_history("l2_penalty_ratio").flatten()
criterion = calibration.get_history("criterion").flatten()
learning = calibration.get_history("learning").flatten()
triang = Triangulation(penalty_level, l2_penalty_ratio)
fig = plt.figure()
ax = fig.add_subplot(1, 2, 1)
ax.tricontourf(triang, criterion, cmap="Purples")
ax.scatter(x_opt["penalty_level"][0], x_opt["l2_penalty_ratio"][0])
ax.set_xlabel("penalty level")
ax.set_ylabel("l2 penalty ratio")
ax.set_title("Test measure")
ax = fig.add_subplot(1, 2, 2)
ax.tricontourf(triang, learning, cmap="Purples")
ax.scatter(x_opt["penalty_level"][0], x_opt["l2_penalty_ratio"][0])
ax.set_xlabel("penalty level")
ax.set_ylabel("l2 penalty ratio")
ax.set_title("Learning measure")
plt.show()
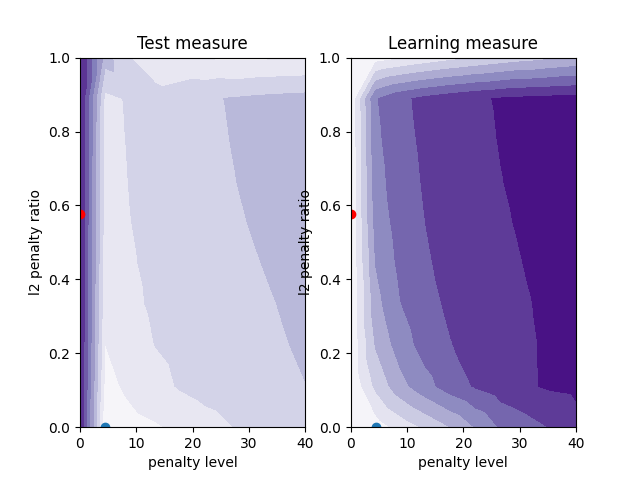
Add an optimization stage#
calibration_space = DesignSpace()
calibration_space.add_variable("penalty_level", 1, "float", 0.0, 40.0, 0.0)
calibration_space.add_variable("l2_penalty_ratio", 1, "float", 0.0, 1.0, 0.5)
calibration = MLAlgoCalibration(
"PolynomialRegressor",
dataset,
["penalty_level", "l2_penalty_ratio"],
calibration_space,
MSEMeasure,
measure_evaluation_method_name=measure_evaluation_method_name,
measure_options=measure_options,
degree=10,
)
calibration.execute("NLOPT_COBYLA", max_iter=100)
x_opt2 = calibration.optimal_parameters
f_opt2 = calibration.optimal_criterion
fig = plt.figure()
ax = fig.add_subplot(1, 2, 1)
ax.tricontourf(triang, criterion, cmap="Purples")
ax.scatter(x_opt["penalty_level"][0], x_opt["l2_penalty_ratio"][0])
ax.scatter(x_opt2["penalty_level"][0], x_opt2["l2_penalty_ratio"][0], color="red")
ax.set_xlabel("penalty level")
ax.set_ylabel("l2 penalty ratio")
ax.set_title("Test measure")
ax = fig.add_subplot(1, 2, 2)
ax.tricontourf(triang, learning, cmap="Purples")
ax.scatter(x_opt["penalty_level"][0], x_opt["l2_penalty_ratio"][0])
ax.scatter(x_opt2["penalty_level"][0], x_opt2["l2_penalty_ratio"][0], color="red")
ax.set_xlabel("penalty level")
ax.set_ylabel("l2 penalty ratio")
ax.set_title("Learning measure")
plt.show()
n_iterations = len(calibration.scenario.disciplines[0].cache)
print(f"MSE with DOE: {f_opt} (100 evaluations)")
print(f"MSE with OPT: {f_opt2} ({n_iterations} evaluations)")
print(f"MSE reduction:{round((f_opt2 - f_opt) / f_opt * 100)}%")
INFO - 20:34:52: *** Start MDOScenario execution ***
INFO - 20:34:52: MDOScenario
INFO - 20:34:52: Disciplines: MLAlgoAssessor
INFO - 20:34:52: MDO formulation: DisciplinaryOpt
INFO - 20:34:52: Optimization problem:
INFO - 20:34:52: minimize criterion(penalty_level, l2_penalty_ratio)
INFO - 20:34:52: with respect to l2_penalty_ratio, penalty_level
INFO - 20:34:52: over the design space:
INFO - 20:34:52: +------------------+-------------+-------+-------------+-------+
INFO - 20:34:52: | Name | Lower bound | Value | Upper bound | Type |
INFO - 20:34:52: +------------------+-------------+-------+-------------+-------+
INFO - 20:34:52: | penalty_level | 0 | 0 | 40 | float |
INFO - 20:34:52: | l2_penalty_ratio | 0 | 0.5 | 1 | float |
INFO - 20:34:52: +------------------+-------------+-------+-------------+-------+
INFO - 20:34:52: Solving optimization problem with algorithm NLOPT_COBYLA:
INFO - 20:34:52: 1%| | 1/100 [00:00<00:00, 108.98 it/sec, obj=1.63e+5]
INFO - 20:34:52: 2%|▏ | 2/100 [00:00<00:00, 111.24 it/sec, obj=4.06e+4]
INFO - 20:34:52: 3%|▎ | 3/100 [00:00<00:00, 113.18 it/sec, obj=4.28e+4]
INFO - 20:34:52: 4%|▍ | 4/100 [00:00<00:00, 113.67 it/sec, obj=5.16e+4]
INFO - 20:34:52: 5%|▌ | 5/100 [00:00<00:00, 113.19 it/sec, obj=4.66e+4]
INFO - 20:34:52: 6%|▌ | 6/100 [00:00<00:00, 113.20 it/sec, obj=3.63e+4]
INFO - 20:34:52: 7%|▋ | 7/100 [00:00<00:00, 113.36 it/sec, obj=3.03e+4]
INFO - 20:34:52: 8%|▊ | 8/100 [00:00<00:00, 113.67 it/sec, obj=2.03e+4]
INFO - 20:34:52: 9%|▉ | 9/100 [00:00<00:00, 113.90 it/sec, obj=2.75e+3]
INFO - 20:34:52: 10%|█ | 10/100 [00:00<00:00, 115.27 it/sec, obj=493]
INFO - 20:34:52: 11%|█ | 11/100 [00:00<00:00, 117.81 it/sec, obj=1.63e+5]
INFO - 20:34:52: 12%|█▏ | 12/100 [00:00<00:00, 120.25 it/sec, obj=1.63e+5]
INFO - 20:34:52: 13%|█▎ | 13/100 [00:00<00:00, 119.87 it/sec, obj=5.23e+3]
INFO - 20:34:52: 14%|█▍ | 14/100 [00:00<00:00, 120.55 it/sec, obj=493]
INFO - 20:34:52: 15%|█▌ | 15/100 [00:00<00:00, 121.16 it/sec, obj=493]
INFO - 20:34:52: 16%|█▌ | 16/100 [00:00<00:00, 121.65 it/sec, obj=493]
INFO - 20:34:52: Optimization result:
INFO - 20:34:52: Optimizer info:
INFO - 20:34:52: Status: None
INFO - 20:34:52: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO stopped the driver.
INFO - 20:34:52: Number of calls to the objective function by the optimizer: 0
INFO - 20:34:52: Solution:
INFO - 20:34:52: Objective: 493.1818200496802
INFO - 20:34:52: Design space:
INFO - 20:34:52: +------------------+-------------+-----------------------+-------------+-------+
INFO - 20:34:52: | Name | Lower bound | Value | Upper bound | Type |
INFO - 20:34:52: +------------------+-------------+-----------------------+-------------+-------+
INFO - 20:34:52: | penalty_level | 0 | 2.289834988289385e-15 | 40 | float |
INFO - 20:34:52: | l2_penalty_ratio | 0 | 0.5765298371174132 | 1 | float |
INFO - 20:34:52: +------------------+-------------+-----------------------+-------------+-------+
INFO - 20:34:52: *** End MDOScenario execution ***
MSE with DOE: 4136.820826715568 (100 evaluations)
MSE with OPT: 493.1818200496802 (1 evaluations)
MSE reduction:-88%
Total running time of the script: (0 minutes 1.528 seconds)