Note
Go to the end to download the full example code
Basic history¶
In this example, we illustrate the use of the BasicHistory plot
on the Sobieski’s SSBJ problem.
from __future__ import annotations
from gemseo import configure_logger
from gemseo import create_discipline
from gemseo import create_scenario
from gemseo.problems.mdo.sobieski.core.design_space import SobieskiDesignSpace
Import¶
The first step is to import some functions from the API and a method to get the design space.
configure_logger()
<RootLogger root (INFO)>
Description¶
The BasicHistory post-processing
plots any of the constraint or objective functions
w.r.t. the optimization iterations or sampling snapshots.
Create disciplines¶
At this point, we instantiate the disciplines of Sobieski’s SSBJ problem: Propulsion, Aerodynamics, Structure and Mission
disciplines = create_discipline([
"SobieskiPropulsion",
"SobieskiAerodynamics",
"SobieskiStructure",
"SobieskiMission",
])
Create design space¶
We also create the SobieskiDesignSpace.
design_space = SobieskiDesignSpace()
Create and execute scenario¶
The next step is to build an MDO scenario in order to maximize the range, encoded ‘y_4’, with respect to the design parameters, while satisfying the inequality constraints ‘g_1’, ‘g_2’ and ‘g_3’. We can use the MDF formulation, the SLSQP optimization algorithm and a maximum number of iterations equal to 100.
scenario = create_scenario(
disciplines,
"MDF",
"y_4",
design_space,
maximize_objective=True,
)
scenario.set_differentiation_method()
for constraint in ["g_1", "g_2", "g_3"]:
scenario.add_constraint(constraint, constraint_type="ineq")
scenario.execute({"algo": "SLSQP", "max_iter": 10})
INFO - 08:59:23:
INFO - 08:59:23: *** Start MDOScenario execution ***
INFO - 08:59:23: MDOScenario
INFO - 08:59:23: Disciplines: SobieskiAerodynamics SobieskiMission SobieskiPropulsion SobieskiStructure
INFO - 08:59:23: MDO formulation: MDF
INFO - 08:59:23: Optimization problem:
INFO - 08:59:23: minimize -y_4(x_shared, x_1, x_2, x_3)
INFO - 08:59:23: with respect to x_1, x_2, x_3, x_shared
INFO - 08:59:23: subject to constraints:
INFO - 08:59:23: g_1(x_shared, x_1, x_2, x_3) <= 0.0
INFO - 08:59:23: g_2(x_shared, x_1, x_2, x_3) <= 0.0
INFO - 08:59:23: g_3(x_shared, x_1, x_2, x_3) <= 0.0
INFO - 08:59:23: over the design space:
INFO - 08:59:23: +-------------+-------------+-------+-------------+-------+
INFO - 08:59:23: | Name | Lower bound | Value | Upper bound | Type |
INFO - 08:59:23: +-------------+-------------+-------+-------------+-------+
INFO - 08:59:23: | x_shared[0] | 0.01 | 0.05 | 0.09 | float |
INFO - 08:59:23: | x_shared[1] | 30000 | 45000 | 60000 | float |
INFO - 08:59:23: | x_shared[2] | 1.4 | 1.6 | 1.8 | float |
INFO - 08:59:23: | x_shared[3] | 2.5 | 5.5 | 8.5 | float |
INFO - 08:59:23: | x_shared[4] | 40 | 55 | 70 | float |
INFO - 08:59:23: | x_shared[5] | 500 | 1000 | 1500 | float |
INFO - 08:59:23: | x_1[0] | 0.1 | 0.25 | 0.4 | float |
INFO - 08:59:23: | x_1[1] | 0.75 | 1 | 1.25 | float |
INFO - 08:59:23: | x_2 | 0.75 | 1 | 1.25 | float |
INFO - 08:59:23: | x_3 | 0.1 | 0.5 | 1 | float |
INFO - 08:59:23: +-------------+-------------+-------+-------------+-------+
INFO - 08:59:23: Solving optimization problem with algorithm SLSQP:
INFO - 08:59:23: 10%|█ | 1/10 [00:00<00:00, 11.06 it/sec, obj=-536]
INFO - 08:59:23: 20%|██ | 2/10 [00:00<00:01, 7.86 it/sec, obj=-2.12e+3]
WARNING - 08:59:23: MDAJacobi has reached its maximum number of iterations but the normed residual 1.7130677857005655e-05 is still above the tolerance 1e-06.
INFO - 08:59:23: 30%|███ | 3/10 [00:00<00:01, 6.59 it/sec, obj=-3.75e+3]
INFO - 08:59:23: 40%|████ | 4/10 [00:00<00:00, 6.30 it/sec, obj=-3.96e+3]
INFO - 08:59:23: 50%|█████ | 5/10 [00:00<00:00, 6.13 it/sec, obj=-3.96e+3]
INFO - 08:59:24: Optimization result:
INFO - 08:59:24: Optimizer info:
INFO - 08:59:24: Status: 8
INFO - 08:59:24: Message: Positive directional derivative for linesearch
INFO - 08:59:24: Number of calls to the objective function by the optimizer: 6
INFO - 08:59:24: Solution:
INFO - 08:59:24: The solution is feasible.
INFO - 08:59:24: Objective: -3963.408265187933
INFO - 08:59:24: Standardized constraints:
INFO - 08:59:24: g_1 = [-0.01806104 -0.03334642 -0.04424946 -0.0518346 -0.05732607 -0.13720865
INFO - 08:59:24: -0.10279135]
INFO - 08:59:24: g_2 = 3.333278582928756e-06
INFO - 08:59:24: g_3 = [-7.67181773e-01 -2.32818227e-01 8.30379541e-07 -1.83255000e-01]
INFO - 08:59:24: Design space:
INFO - 08:59:24: +-------------+-------------+---------------------+-------------+-------+
INFO - 08:59:24: | Name | Lower bound | Value | Upper bound | Type |
INFO - 08:59:24: +-------------+-------------+---------------------+-------------+-------+
INFO - 08:59:24: | x_shared[0] | 0.01 | 0.06000083331964572 | 0.09 | float |
INFO - 08:59:24: | x_shared[1] | 30000 | 60000 | 60000 | float |
INFO - 08:59:24: | x_shared[2] | 1.4 | 1.4 | 1.8 | float |
INFO - 08:59:24: | x_shared[3] | 2.5 | 2.5 | 8.5 | float |
INFO - 08:59:24: | x_shared[4] | 40 | 70 | 70 | float |
INFO - 08:59:24: | x_shared[5] | 500 | 1500 | 1500 | float |
INFO - 08:59:24: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 08:59:24: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 08:59:24: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 08:59:24: | x_3 | 0.1 | 0.1562448753887276 | 1 | float |
INFO - 08:59:24: +-------------+-------------+---------------------+-------------+-------+
INFO - 08:59:24: *** End MDOScenario execution (time: 0:00:00.931178) ***
{'max_iter': 10, 'algo': 'SLSQP'}
Post-process scenario¶
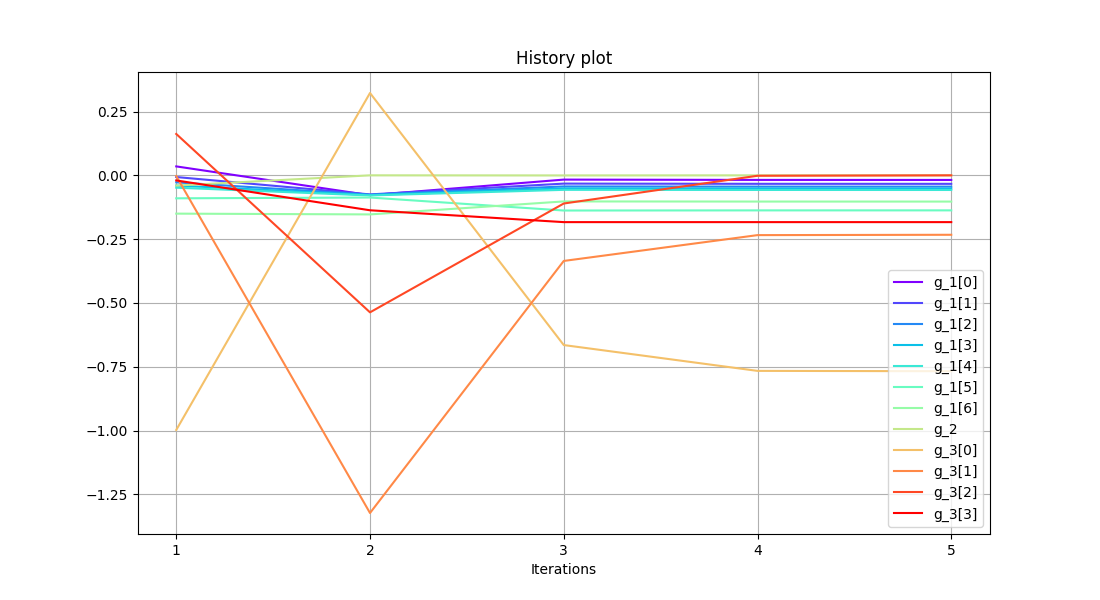
Lastly, we post-process the scenario by means of the BasicHistory
plot which plots any of the constraint or objective functions
w.r.t. optimization iterations or sampling snapshots.
Tip
Each post-processing method requires different inputs and offers a variety
of customization options. Use the API function
get_post_processing_options_schema() to print a table with
the options for any post-processing algorithm.
Or refer to our dedicated page:
Post-processing algorithms.
scenario.post_process(
"BasicHistory",
variable_names=["g_1", "g_2", "g_3"],
save=False,
show=True,
)
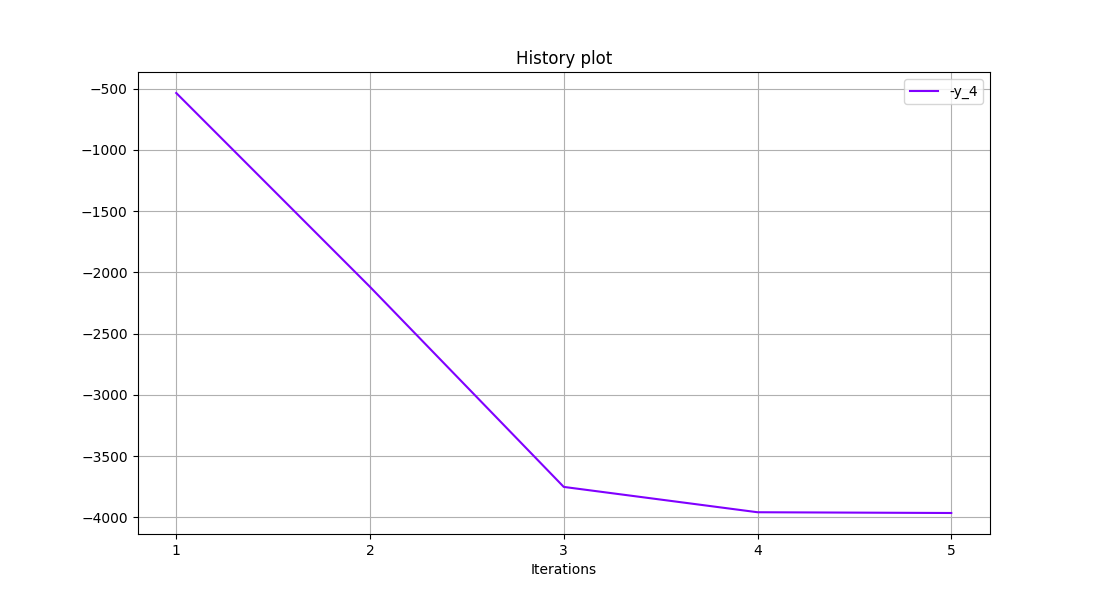
scenario.post_process("BasicHistory", variable_names=["y_4"], save=False, show=True)
<gemseo.post.basic_history.BasicHistory object at 0x7f1da6c25bb0>
Note
Set the boolean instance attribute
OptimizationProblem.use_standardized_objective to False
to plot the objective to maximize as a performance function.
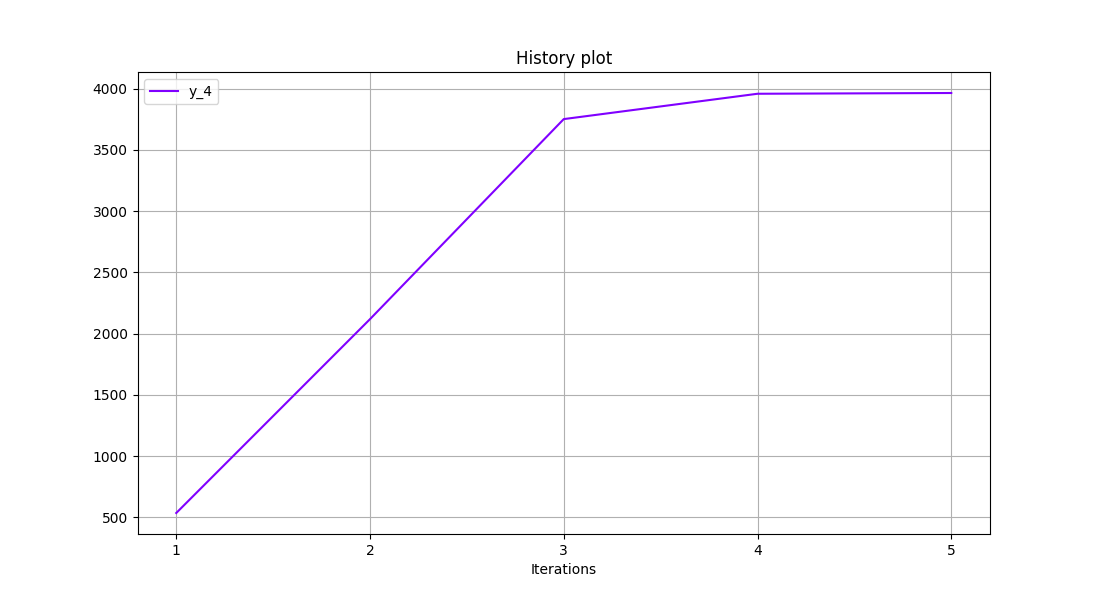
scenario.use_standardized_objective = False
scenario.post_process("BasicHistory", variable_names=["y_4"], save=False, show=True)
<gemseo.post.basic_history.BasicHistory object at 0x7f1da762c970>
Total running time of the script: (0 minutes 1.505 seconds)