Benchmark problems¶
In this section, we describe the GEMSEO’s benchmark MDO problems:
Sellar’s problem¶
The Sellar’s problem is considered in different tutorials:
Description of the problem¶
The Sellar problem is defined by analytical functions:
where the coupling variables are
and
and where the general constraints are
The Sellar disciplines are also available with analytic derivatives in GEMSEO, as well as a DesignSpace:
Creation of the disciplines¶
To create the Sellar disciplines, use the function create_discipline:
from gemseo import create_discipline
disciplines = create_discipline(["Sellar1", "Sellar2", "SellarSystem"])
Importation of the design space¶
To import the Sellar design space, use the class create_discipline:
from gemseo.problems.mdo.sellar.sellar_design_space import SellarDesignSpace
design_space = SellarDesignSpace()
Then, you can visualize it with print(design_space):
+----------+-------------+--------+-------------+-------+
| name | lower_bound | value | upper_bound | type |
+----------+-------------+--------+-------------+-------+
| x_local | 0 | (1+0j) | 10 | float |
+ + + + + +
| x_shared | -10 | (4+0j) | 10 | float |
+ + + + + +
| x_shared | 0 | (3+0j) | 10 | float |
+ + + + + +
| y_1 | -100 | (1+0j) | 100 | float |
+ + + + + +
| y_2 | -100 | (1+0j) | 100 | float |
+----------+-------------+--------+-------------+-------+
See also
See Tutorial: How to solve an MDO problem to create the Sellar problem from scratch
Aerostructure problem¶
The Sobieski’s SSBJ test case is considered in the different tutorials:
Description of the problem¶
The Aerostructure problem is defined by analytical functions:
where
and
The Aerostructure disciplines are also available with analytic derivatives in the classes Mission, Aerodynamics and Structure, as well as a AerostructureDesignSpace:
Creation of the disciplines¶
To create the aerostructure disciplines, use the function create_discipline():
from gemseo import create_discipline
disciplines = create_discipline(["Aerodynamics", "Structure", "Mission"])
Importation of the design space¶
To import the aerostructure design space, use the class create_discipline:
from gemseo.problems.aerostructure.aerostructure_design_space import AerostructureDesignSpace
design_space = AerostructureDesignSpace()
Then, you can visualize it with print(design_space):
+----------------+-------------+-------------+-------------+-------+
| name | lower_bound | value | upper_bound | type |
+----------------+-------------+-------------+-------------+-------+
| thick_airfoils | 5 | (15+0j) | 25 | float |
| thick_panels | 1 | (3+0j) | 20 | float |
| sweep | 10 | (25+0j) | 35 | float |
| drag | 100 | (340+0j) | 1000 | float |
| forces | -1000 | (400+0j) | 1000 | float |
| lift | 0.1 | (0.5+0j) | 1 | float |
| mass | 100000 | (100000+0j) | 500000 | float |
| displ | -1000 | (-700+0j) | 1000 | float |
| rf | -1000 | 0j | 1000 | float |
+----------------+-------------+-------------+-------------+-------+
See also
See MDO formulations and scalable models for a toy example in aerostructure to see an application of this problem.
Sobieski’s SSBJ test case¶
The Sobieski’s SSBJ test case is considered in the different tutorials:
Origin of the test case¶
This test was taken from the reference article by Sobieski, the first publication on the BLISS formulation. It is based on a 1996 AIAA student competition organized by the AIAA/United Technologies/Pratt & Whitney Individual Undergraduate Design Competition. This competition initially focused on both the technical and economical challenges of a development.
The formulas used for each are based on semi-empirical and/or analytical models. Depending on the , some examples can be found in the following references [And36, Niu88, Ray06]. As specified by Sobieski et al., additional design and state variables (not present in the original problem) were introduced in the disciplinary analyses for testing purposes.
The MDO problem¶
The design problem is
to maximize the range "y_4" of a Super-Sonic Business Jet (SSBJ)
with respect to the design variables "x_shared", "x_1", "x_2" and "x_3"
under the constraints "g_1", "g_2" and "g_3".
The objective and constraints are computed by four disciplines:
SobieskiStructure(indexed by 1) computes the constraint"g_1"from"x_shared"and"x_1",SobieskiAerodynamics(indexed by 2) computes the constraint"g_2"from"x_shared"and"x_2",SobieskiPropulsion(indexed by 3) computes the constraint"g_3"from"x_shared"and"x_3",SobieskiMission(indexed by 4) computes the constraint"y_4"from"x_shared".
"x_shared" denotes the global design variables (a.k.a. shared design variables),
which means that these variables are shared by at least two disciplines (here, all).
"x_1", "x_2" and "x_3" denote the local design variables,
which means that "x_i" is used by a single discipline (here, number i).
The disciplines
SobieskiStructure,
SobieskiAerodynamics
and SobieskiPropulsion
are strongly coupled to each other
but weakly coupled to SobieskiMission.
The coupling variable "y_ij" denotes
an output of the discipline no. i and an input of the discipline no. j.
Input variables¶
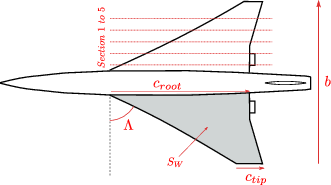
The planform variables¶
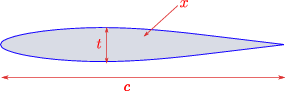
The airfoils variables¶
Disciplines |
Variable |
Description |
Bounds |
Notation |
|---|---|---|---|---|
All |
\(t/c\) |
Thickness to chord ratio |
\(0.01\leq t/c\leq 0.09\) |
|
All |
\(h\) |
Altitude (\(ft\)) |
\(30000\leq h \leq 60000\) |
|
All |
\(M\) |
Mach number |
\(1.4\leq M\leq 1.8\) |
|
All |
\(AR=b^2/S_W\) |
Aspect ratio |
\(2.5\leq AR\leq 8.5\) |
|
All |
\(\Lambda\) |
Wing sweep (\(\deg\)) |
\(40\leq\Lambda\leq70\) |
|
All |
\(S_W\) |
Wing surface area (\(ft^2\)) |
\(500\leq S\leq 1500\) |
|
Structure |
\(\lambda = {c_{tip}}/{c_{root}}\) |
Wing taper ratio |
\(0.1\leq\lambda\leq0.4\) |
|
Structure |
\(x\) |
Wingbox x-sectional area (\(ft^2\)) |
\(0.75\leq x \leq 1.25\) |
|
Structure |
\(L\) |
Lift from by Aerodynamics (\(N\)) |
|
|
Structure |
\(W_{E}\) |
Engine mass from Propulsion (\(lb\)) |
|
|
Aerodynamics |
\(C_f\) |
Skin friction coefficient |
\(0.75\leq C_f\leq 1.25\) |
|
Aerodynamics |
\(W_T\) |
Total aircraft mass from Structure (\(lb\)) |
|
|
Aerodynamics |
\(\Delta\alpha_v\) |
Wing twist from Structure |
|
|
Propulsion |
\(ESF\) |
Engine scale factor (ESF) from Propulsion |
|
|
Propulsion |
\(Th\) |
Throttle setting (engine mass flow) |
\(0.1\leq Th\leq 1.25\) |
|
Propulsion |
\(D\) |
Drag from Aerodynamics (\(N\)) |
|
|
Mission |
\(L/D\) |
Lift-over-drag ratio from Aerodynamics |
|
|
Mission |
\(W_T\) |
Total aircraft mass from Structure (\(lb\)) |
|
|
Mission |
\(W_F\) |
Fuel mass from Structure (\(lb\)) |
|
|
Mission |
\(SFC\) |
Specific fuel consumption (SFC) from Propulsion |
|
Output variables¶
Disciplines |
Variable |
Description |
Bounds |
Notation |
|---|---|---|---|---|
Structure |
\(\sigma_1-1.09\) |
Constraint about stress \(\sigma_1\) on wing section 1 |
\(\sigma_1-1.09\leq 0\) |
|
Structure |
\(\sigma_2-1.09\) |
Constraint about stress \(\sigma_2\) on wing section 2 |
\(\sigma_2-1.09\leq 0\) |
|
Structure |
\(\sigma_3-1.09\) |
Constraint about stress \(\sigma_3\) on wing section 3 |
\(\sigma_3-1.09\leq 0\) |
|
Structure |
\(\sigma_4-1.09\) |
Constraint about stress \(\sigma_4\) on wing section 4 |
\(\sigma_4-1.09\leq 0\) |
|
Structure |
\(\sigma_5-1.09\) |
Constraint about stress \(\sigma_5\) on wing section 5 |
\(\sigma_5-1.09\leq 0\) |
|
Structure |
\(\Delta\alpha_{v}-1.04\) |
First constraint about wing twist \(\Delta\alpha_{v}\) |
\(\Delta\alpha_{v}-1.04\leq 0\) |
|
Structure |
\(0.96-\Delta\alpha_{v}\) |
Second constraint about wing twist \(\Delta\alpha_{v}\) |
\(0.96-\Delta\alpha_{v}\leq 0\) |
|
Structure |
\(W_T\) |
Total aircraft mass (\(lb\)) |
|
|
Structure |
\(W_F\) |
Fuel mass (\(lb\)) |
|
|
Structure |
\(\Delta\alpha_{v}\) |
Wing twist (\(\deg\)) |
\(0.96\leq \Delta\alpha_{v}\leq 1.04\) |
|
Aerodynamics |
\(L\) |
Lift (:math:`lb) |
|
|
Aerodynamics |
\(D\) |
Drag (\(lb\)) |
|
|
Aerodynamics |
\(L/D\) |
Lift-over-drag ratio |
|
|
Aerodynamics |
\(dp/dx-1.04\) |
Constraint about the pressure gradient \(dp/dx\) |
\(dp/dx-1.04\leq 0\) |
|
Propulsion |
\(SFC\) |
Specific fuel consumption (SFC) |
|
|
Propulsion |
\(W_E\) |
Engine mass (\(lb\)) |
|
|
Propulsion |
\(ESF\) |
Engine scale factor (ESF) |
\(0.5\leq ESF \leq 1.5\) |
|
Propulsion |
\(ESF-1.5\) |
First constraint about the ESF |
\(ESF-1.5 \leq 0\) |
|
Propulsion |
\(0.5-ESF\) |
Second constraint about the ESF |
\(0.5-ESF \leq 0\) |
|
Propulsion |
\(Th-Th_{uA}\) |
Constraint about the throttle \(Th\) |
\(Th-Th_{uA}\leq 0\) |
|
Propulsion |
\(T_E-1.02\) |
Constraint about the engine temperature \(T_E\) |
\(T_E-1.02\leq 0\) |
|
Mission |
\(R\) |
Range (\(nm\)) |
|
Creation of the disciplines¶
To create the disciplines of the Sobieski problem:
from gemseo import create_discipline
disciplines = create_discipline(["SobieskiStructure", "SobieskiPropulsion", "SobieskiAerodynamics", "SobieskiMission"])
Reference results¶
This problem was implemented by Sobieski et al. in Matlab and Isight. Both implementations led to the same results.
As all gradients can be computed, we resort to gradient-based optimization methods. All Jacobian matrices are coded analytically in GEMSEO.
Reference results using the MDF formulation are presented in the next table.
Variable |
Initial |
Optimum |
|---|---|---|
Range (nm) |
535.79 |
3963.88 |
\(\lambda\) |
0.25 |
0.38757 |
\(x\) |
1 |
0.75 |
\(C_f\) |
1 |
0.75 |
\(Th\) |
0.5 |
0.15624 |
\(t/c\) |
0.05 |
0.06 |
\(h\) \((ft)\)) |
45000 |
60000 |
\(M\) |
1.6 |
1.4 |
\(AR\) |
5.5 |
2.5 |
\(\Lambda\) \((\deg)\) |
55 |
70 |
\(S_W\) \((ft^2)\) |
1000 |
1500 |
The Propane combustion problem¶
The Propane MDO problem can be found in [PAG96] and [TM06]. It represents the chemical equilibrium reached during the combustion of propane in air. Variables are assigned to represent each of the ten combustion products as well as the sum of the products.
The optimization problem is as follows:
where the System Discipline consists of computing the following expressions:
Discipline 1 computes \((x_{2}, x_{4})\) by satisfying the following equations:
Discipline 2 computes \((x_2, x_4)\) such that:
and Discipline 3 computes \((x_5, x_9, x_{11})\) by solving:
Creation of the disciplines¶
The Propane combustion disciplines are available in GEMSEO and can be imported with the following code:
from gemseo import create_discipline
disciplines = create_discipline(["PropaneComb1", "PropaneComb2", "PropaneComb3", "PropaneReaction"])
A gemseo.algos.design_space.DesignSpace file propane_design_space.csv is also available in the same folder, which can be read using
the gemseo.read_design_space() method.
Problem results¶
The optimum is \((x1,x3,x6,x7) = (1.378887, 18.426810, 1.094798, 0.931214)\). The minimum objective value is \(0\). At this point, all the system-level inequality constraints are active.