Scalable models¶
A scalable methodology to test MDO formulation on benchmark or real problems.
This API facilitates
the use of the gemseo.problems.mdo.scalable.data_driven.study
package implementing classes to benchmark MDO formulations
based on scalable disciplines.
ScalabilityStudy class implements the concept of scalability study:
By instantiating a
ScalabilityStudy, the user defines the MDO problem in terms of design parameters, objective function and constraints.For each discipline, the user adds a dataset stored in a
Datasetand select a type ofScalableModelto build theScalableDisciplineassociated with this discipline.The user adds different optimization strategies, defined in terms of both optimization algorithms and MDO formulation.
The user adds different scaling strategies, in terms of sizes of design parameters, coupling variables and equality and inequality constraints. The user can also define a scaling strategies according to particular parameters rather than groups of parameters.
Lastly, the user executes the
ScalabilityStudyand the results are written in several files and stored into directories in a hierarchical way, where names depend on both MDO formulation, scaling strategy and replications when it is necessary. Different kinds of files are stored: optimization graphs, dependency matrix plots and of course, scalability results by means of a dedicated class:ScalabilityResult.
- gemseo.problems.mdo.scalable.data_driven.create_scalability_study(objective, design_variables, directory='study', prefix='', eq_constraints=None, ineq_constraints=None, maximize_objective=False, fill_factor=0.7, active_probability=0.1, feasibility_level=0.8, start_at_equilibrium=True, early_stopping=True, coupling_variables=None)[source]
This method creates a
ScalabilityStudy.It requires two mandatory arguments:
the
'objective'name,the list of
'design_variables'names.
Concerning output files, we can specify:
the
directorywhich is'study'by default,the prefix of output file names (default: no prefix).
Regarding optimization parametrization, we can specify:
the list of equality constraints names (
eq_constraints),the list of inequality constraints names (
ineq_constraints),the choice of maximizing the objective function (
maximize_objective).
By default, the objective function is minimized and the MDO problem is unconstrained.
Last but not least, with regard to the scalability methodology, we can overwrite:
the default fill factor of the input-output dependency matrix
ineq_constraints,the probability to set the inequality constraints as active at initial step of the optimization
active_probability,the offset of satisfaction for inequality constraints
feasibility_level,the use of a preliminary MDA to start at equilibrium
start_at_equilibrium,the post-processing of the optimization database to get results earlier than final step
early_stopping.
- Parameters:
objective (str) – The name of the objective.
design_variables (Iterable[str]) – The names of the design variables.
directory (str) –
The working directory of the study.
By default it is set to “study”.
prefix (str) –
The prefix for the output filenames.
By default it is set to “”.
eq_constraints (Iterable[str] | None) – The names of the equality constraints, if any.
ineq_constraints (Iterable[str] | None) – The names of the inequality constraints, if any.
maximize_objective (bool) –
Whether to maximize the objective.
By default it is set to False.
fill_factor (float) –
The default fill factor of the input-output dependency matrix.
By default it is set to 0.7.
active_probability (float) –
The probability to set the inequality constraints as active at initial step of the optimization.
By default it is set to 0.1.
feasibility_level (float) –
The offset of satisfaction for the inequality constraints.
By default it is set to 0.8.
start_at_equilibrium (bool) –
Whether to start at equilibrium using a preliminary MDA.
By default it is set to True.
early_stopping (bool) –
Whether to post-process the optimization database to get results earlier than final step.
By default it is set to True.
coupling_variables (Iterable[str] | None) – The names of the coupling variables.
- Return type:
- gemseo.problems.mdo.scalable.data_driven.plot_scalability_results(study_directory)[source]
Plot
ScalabilityResult`s generated by a :class:.ScalabilityStudy`.- Parameters:
study_directory (str) – The directory of the scalability study.
- Return type:
Scalable MDO problem.
This module implements the concept of scalable problem by means of the
ScalableProblem class.
Given
an MDO scenario based on a set of sampled disciplines with a particular problem dimension,
a new problem dimension (= number of inputs and outputs),
a scalable problem:
makes each discipline scalable based on the new problem dimension,
creates the corresponding MDO scenario.
Then, this MDO scenario can be executed and post-processed.
We can repeat this tasks for different sizes of variables and compare the scalability, which is the dependence of the scenario results on the problem dimension.
See also
- class gemseo.problems.mdo.scalable.data_driven.problem.ScalableProblem(datasets, design_variables, objective_function, eq_constraints=None, ineq_constraints=None, maximize_objective=False, sizes=None, **parameters)[source]
Scalable problem.
- Parameters:
datasets (Iterable[IODataset]) – One input-output dataset per discipline.
design_variables (Iterable[str]) – The names of the design variables.
objective_function (str) – The name of the objective.
eq_constraints (Iterable[str] | None) – The names of the equality constraints, if any.
ineq_constraints (Iterable[str] | None) – The names of the inequality constraints, if any.
maximize_objective (bool) –
Whether to maximize the objective.
By default it is set to False.
sizes (Mapping[str, int] | None) – The sizes of the inputs and outputs. If
None, use the original sizes.**parameters (Any) – The optional parameters of the scalable model.
- create_scenario(formulation='DisciplinaryOpt', scenario_type='MDO', start_at_equilibrium=False, active_probability=0.1, feasibility_level=0.5, **options)[source]
Create a
Scenariofrom the scalable disciplines.- Parameters:
formulation (str) –
The MDO formulation to use for the scenario.
By default it is set to “DisciplinaryOpt”.
scenario_type (str) –
The type of scenario, either
MDOorDOE.By default it is set to “MDO”.
start_at_equilibrium (bool) –
Whether to start at equilibrium using a preliminary MDA.
By default it is set to False.
active_probability (float) –
The probability to set the inequality constraints as active at the initial step of the optimization.
By default it is set to 0.1.
feasibility_level (float) –
The offset of satisfaction for inequality constraints.
By default it is set to 0.5.
**options – The formulation options.
- Returns:
The
Scenariofrom the scalable disciplines.- Return type:
- exec_time(do_sum=True)[source]
Get the total execution time.
- plot_1d_interpolations(save=True, show=False, step=0.01, varnames=None, directory='.', png=False)[source]
Plot 1d interpolations.
- Parameters:
save (bool) –
Whether to save the figure.
By default it is set to True.
show (bool) –
Whether to display the figure.
By default it is set to False.
step (float) –
The step to evaluate the 1d interpolation function.
By default it is set to 0.01.
varnames (Sequence[str] | None) – The names of the variable to plot. If
None, all the variables are plotted.directory (Path | str) –
The directory path.
By default it is set to “.”.
png (bool) –
Whether to use PNG file format instead of PDF.
By default it is set to False.
- plot_coupling_graph()[source]
Plot a coupling graph.
- Return type:
None
- plot_dependencies(save=True, show=False, directory='.')[source]
Plot dependency matrices.
- plot_n2_chart(save=True, show=False)[source]
Plot a N2 chart.
- property is_feasible: bool
Whether the solution is feasible.
- property n_calls_linearize: dict[str, int]
The number of disciplinary linearizations per discipline.
- property n_calls_linearize_top_level: dict[str, int]
The number of top-level disciplinary linearizations per discipline.
- property n_calls_top_level: dict[str, int]
The number of top-level disciplinary calls per discipline.
- property status: int
The status of the scenario.
Scalable discipline.
The discipline
implements the concept of scalable discipline.
This is a particular discipline
built from an input-output learning dataset associated with a function
and generalizing its behavior to a new user-defined problem dimension,
that is to say new user-defined input and output dimensions.
Alone or in interaction with other objects of the same type, a scalable discipline can be used to compare the efficiency of an algorithm applying to disciplines with respect to the problem dimension, e.g. optimization algorithm, surrogate model, MDO formulation, MDA, …
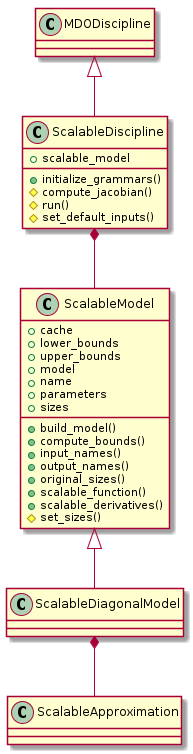
The ScalableDiscipline class implements this concept.
It inherits from the MDODiscipline class
in such a way that it can easily be used in a Scenario.
It is composed of a ScalableModel.
The user only needs to provide:
the name of a class overloading
ScalableModel,a dataset as an
Datasetvariables sizes as a dictionary whose keys are the names of inputs and outputs and values are their new sizes. If a variable is missing, its original size is considered.
The ScalableModel parameters can also be filled in,
otherwise the model uses default values.
- class gemseo.problems.mdo.scalable.data_driven.discipline.ScalableDiscipline(name, data, sizes=None, **parameters)[source]
A scalable discipline.
Initialize self. See help(type(self)) for accurate signature.
- Parameters:
- class ApproximationMode(value)
The approximation derivation modes.
- CENTERED_DIFFERENCES = 'centered_differences'
The centered differences method used to approximate the Jacobians by perturbing each variable with a small real number.
- COMPLEX_STEP = 'complex_step'
The complex step method used to approximate the Jacobians by perturbing each variable with a small complex number.
- FINITE_DIFFERENCES = 'finite_differences'
The finite differences method used to approximate the Jacobians by perturbing each variable with a small real number.
- class CacheType(value)
The name of the cache class.
- NONE = ''
No cache is used.
- class ExecutionStatus(value)
The execution statuses of a discipline.
- class GrammarType(value)
The name of the grammar class.
- class InitJacobianType(value)
The way to initialize Jacobian matrices.
- DENSE = 'dense'
The Jacobian is initialized as a NumPy ndarray filled in with zeros.
- EMPTY = 'empty'
The Jacobian is initialized as an empty NumPy ndarray.
- SPARSE = 'sparse'
The Jacobian is initialized as a SciPy CSR array with zero elements.
- class LinearizationMode(value)
An enumeration.
- ADJOINT = 'adjoint'
- AUTO = 'auto'
- CENTERED_DIFFERENCES = 'centered_differences'
- COMPLEX_STEP = 'complex_step'
- DIRECT = 'direct'
- FINITE_DIFFERENCES = 'finite_differences'
- REVERSE = 'reverse'
- class ReExecutionPolicy(value)
The re-execution policy of a discipline.
- classmethod activate_time_stamps()
Activate the time stamps.
For storing start and end times of execution and linearizations.
- Return type:
None
- add_differentiated_inputs(inputs=None)
Add the inputs for differentiation.
The inputs that do not represent continuous numbers are filtered out.
- Parameters:
inputs (Iterable[str] | None) – The input variables against which to differentiate the outputs. If
None, all the inputs of the discipline are used.- Raises:
ValueError – When ``inputs `` are not in the input grammar.
- Return type:
None
- add_differentiated_outputs(outputs=None)
Add the outputs for differentiation.
The outputs that do not represent continuous numbers are filtered out.
- Parameters:
outputs (Iterable[str] | None) – The output variables to be differentiated. If
None, all the outputs of the discipline are used.- Raises:
ValueError – When ``outputs `` are not in the output grammar.
- Return type:
None
- add_namespace_to_input(name, namespace)
Add a namespace prefix to an existing input grammar element.
The updated input grammar element name will be
namespace+namespaces_separator+name.
- add_namespace_to_output(name, namespace)
Add a namespace prefix to an existing output grammar element.
The updated output grammar element name will be
namespace+namespaces_separator+name.
- add_status_observer(obs)
Add an observer for the status.
Add an observer for the status to be notified when self changes of status.
- Parameters:
obs (Any) – The observer to add.
- Return type:
None
- auto_get_grammar_file(is_input=True, name=None, comp_dir=None)
Use a naming convention to associate a grammar file to the discipline.
Search in the directory
comp_dirfor either an input grammar file namedname + "_input.json"or an output grammar file namedname + "_output.json".- Parameters:
is_input (bool) –
Whether to search for an input or output grammar file.
By default it is set to True.
name (str | None) – The name to be searched in the file names. If
None, use the name of the discipline class.comp_dir (str | Path | None) – The directory in which to search the grammar file. If
None, use theGRAMMAR_DIRECTORYif any, or the directory of the discipline class module.
- Returns:
The grammar file path.
- Return type:
Path
- check_input_data(input_data, raise_exception=True)
Check the input data validity.
- check_jacobian(input_data=None, derr_approx=ApproximationMode.FINITE_DIFFERENCES, step=1e-07, threshold=1e-08, linearization_mode='auto', inputs=None, outputs=None, parallel=False, n_processes=2, use_threading=False, wait_time_between_fork=0, auto_set_step=False, plot_result=False, file_path='jacobian_errors.pdf', show=False, fig_size_x=10, fig_size_y=10, reference_jacobian_path=None, save_reference_jacobian=False, indices=None)
Check if the analytical Jacobian is correct with respect to a reference one.
If reference_jacobian_path is not None and save_reference_jacobian is True, compute the reference Jacobian with the approximation method and save it in reference_jacobian_path.
If reference_jacobian_path is not None and save_reference_jacobian is False, do not compute the reference Jacobian but read it from reference_jacobian_path.
If reference_jacobian_path is None, compute the reference Jacobian without saving it.
- Parameters:
input_data (Mapping[str, ndarray] | None) – The input data needed to execute the discipline according to the discipline input grammar. If
None, use theMDODiscipline.default_inputs.derr_approx (ApproximationMode) –
The approximation method, either “complex_step” or “finite_differences”.
By default it is set to “finite_differences”.
threshold (float) –
The acceptance threshold for the Jacobian error.
By default it is set to 1e-08.
linearization_mode (str) –
the mode of linearization: direct, adjoint or automated switch depending on dimensions of inputs and outputs (Default value = ‘auto’)
By default it is set to “auto”.
inputs (Iterable[str] | None) – The names of the inputs wrt which to differentiate the outputs.
outputs (Iterable[str] | None) – The names of the outputs to be differentiated.
step (float) –
The differentiation step.
By default it is set to 1e-07.
parallel (bool) –
Whether to differentiate the discipline in parallel.
By default it is set to False.
n_processes (int) –
The maximum simultaneous number of threads, if
use_threadingis True, or processes otherwise, used to parallelize the execution.By default it is set to 2.
use_threading (bool) –
Whether to use threads instead of processes to parallelize the execution; multiprocessing will copy (serialize) all the disciplines, while threading will share all the memory This is important to note if you want to execute the same discipline multiple times, you shall use multiprocessing.
By default it is set to False.
wait_time_between_fork (float) –
The time waited between two forks of the process / thread.
By default it is set to 0.
auto_set_step (bool) –
Whether to compute the optimal step for a forward first order finite differences gradient approximation.
By default it is set to False.
plot_result (bool) –
Whether to plot the result of the validation (computed vs approximated Jacobians).
By default it is set to False.
file_path (str | Path) –
The path to the output file if
plot_resultisTrue.By default it is set to “jacobian_errors.pdf”.
show (bool) –
Whether to open the figure.
By default it is set to False.
fig_size_x (float) –
The x-size of the figure in inches.
By default it is set to 10.
fig_size_y (float) –
The y-size of the figure in inches.
By default it is set to 10.
reference_jacobian_path (str | Path | None) – The path of the reference Jacobian file.
save_reference_jacobian (bool) –
Whether to save the reference Jacobian.
By default it is set to False.
indices (Iterable[int] | None) – The indices of the inputs and outputs for the different sub-Jacobian matrices, formatted as
{variable_name: variable_components}wherevariable_componentscan be either an integer, e.g. 2 a sequence of integers, e.g. [0, 3], a slice, e.g. slice(0,3), the ellipsis symbol (…) or None, which is the same as ellipsis. If a variable name is missing, consider all its components. IfNone, consider all the components of all theinputsandoutputs.
- Returns:
Whether the analytical Jacobian is correct with respect to the reference one.
- Return type:
- check_output_data(raise_exception=True)
Check the output data validity.
- Parameters:
raise_exception (bool) –
Whether to raise an exception when the data is invalid.
By default it is set to True.
- Return type:
None
- classmethod deactivate_time_stamps()
Deactivate the time stamps.
For storing start and end times of execution and linearizations.
- Return type:
None
- execute(input_data=None)
Execute the discipline.
This method executes the discipline:
Adds the default inputs to the
input_dataif some inputs are not defined in input_data but exist inMDODiscipline.default_inputs.Checks whether the last execution of the discipline was called with identical inputs, i.e. cached in
MDODiscipline.cache; if so, directly returnsself.cache.get_output_cache(inputs).Caches the inputs.
Checks the input data against
MDODiscipline.input_grammar.If
MDODiscipline.data_processoris not None, runs the preprocessor.Updates the status to
MDODiscipline.ExecutionStatus.RUNNING.Calls the
MDODiscipline._run()method, that shall be defined.If
MDODiscipline.data_processoris not None, runs the postprocessor.Checks the output data.
Caches the outputs.
Updates the status to
MDODiscipline.ExecutionStatus.DONEorMDODiscipline.ExecutionStatus.FAILED.Updates summed execution time.
- Parameters:
input_data (Mapping[str, Any] | None) – The input data needed to execute the discipline according to the discipline input grammar. If
None, use theMDODiscipline.default_inputs.- Returns:
The discipline local data after execution.
- Return type:
- static from_pickle(file_path)
Deserialize a discipline from a file.
- Parameters:
file_path (str | Path) – The path to the file containing the discipline.
- Returns:
The discipline instance.
- Return type:
- get_all_inputs()
Return the local input data.
The order is given by
MDODiscipline.get_input_data_names().- Returns:
The local input data.
- Return type:
Iterator[Any]
- get_all_outputs()
Return the local output data.
The order is given by
MDODiscipline.get_output_data_names().- Returns:
The local output data.
- Return type:
Iterator[Any]
- static get_data_list_from_dict(keys, data_dict)
Filter the dict from a list of keys or a single key.
If keys is a string, then the method return the value associated to the key. If keys is a list of strings, then the method returns a generator of value corresponding to the keys which can be iterated.
- get_disciplines_in_dataflow_chain()
Return the disciplines that must be shown as blocks in the XDSM.
By default, only the discipline itself is shown. This function can be differently implemented for any type of inherited discipline.
- Returns:
The disciplines shown in the XDSM chain.
- Return type:
- get_expected_dataflow()
Return the expected data exchange sequence.
This method is used for the XDSM representation.
The default expected data exchange sequence is an empty list.
See also
MDOFormulation.get_expected_dataflow
- Returns:
The data exchange arcs.
- Return type:
- get_expected_workflow()
Return the expected execution sequence.
This method is used for the XDSM representation.
The default expected execution sequence is the execution of the discipline itself.
See also
MDOFormulation.get_expected_workflow
- Returns:
The expected execution sequence.
- Return type:
- get_input_data(with_namespaces=True)
Return the local input data as a dictionary.
- get_input_data_names(with_namespaces=True)
Return the names of the input variables.
- get_input_output_data_names(with_namespaces=True)
Return the names of the input and output variables.
- get_inputs_asarray()
Return the local output data as a large NumPy array.
The order is the one of
MDODiscipline.get_all_outputs().- Returns:
The local output data.
- Return type:
- get_inputs_by_name(data_names)
Return the local data associated with input variables.
- Parameters:
data_names (Iterable[str]) – The names of the input variables.
- Returns:
The local data for the given input variables.
- Raises:
ValueError – When a variable is not an input of the discipline.
- Return type:
Iterator[Any]
- get_local_data_by_name(data_names)
Return the local data of the discipline associated with variables names.
- Parameters:
data_names (Iterable[str]) – The names of the variables.
- Returns:
The local data associated with the variables names.
- Raises:
ValueError – When a name is not a discipline input name.
- Return type:
Iterator[Any]
- get_output_data(with_namespaces=True)
Return the local output data as a dictionary.
- get_output_data_names(with_namespaces=True)
Return the names of the output variables.
- get_outputs_asarray()
Return the local input data as a large NumPy array.
The order is the one of
MDODiscipline.get_all_inputs().- Returns:
The local input data.
- Return type:
- get_outputs_by_name(data_names)
Return the local data associated with output variables.
- Parameters:
data_names (Iterable[str]) – The names of the output variables.
- Returns:
The local data for the given output variables.
- Raises:
ValueError – When a variable is not an output of the discipline.
- Return type:
Iterator[Any]
- get_sub_disciplines(recursive=False)
Determine the sub-disciplines.
This method lists the sub-disciplines’ disciplines. It will list up to one level of disciplines contained inside another one unless the
recursiveargument is set toTrue.- Parameters:
recursive (bool) –
If
True, the method will look inside any discipline that has other disciplines inside until it reaches a discipline without sub-disciplines, in this case the return value will not include any discipline that has sub-disciplines. IfFalse, the method will list up to one level of disciplines contained inside another one, in this case the return value may include disciplines that contain sub-disciplines.By default it is set to False.
- Returns:
The sub-disciplines.
- Return type:
- initialize_grammars(data)[source]
Initialize input and output grammars from data names.
- Parameters:
data (IODataset) – The learning dataset.
- Return type:
None
- is_all_inputs_existing(data_names)
Test if several variables are discipline inputs.
- is_all_outputs_existing(data_names)
Test if several variables are discipline outputs.
- is_input_existing(data_name)
Test if a variable is a discipline input.
- is_output_existing(data_name)
Test if a variable is a discipline output.
- static is_scenario()
Whether the discipline is a scenario.
- Return type:
- linearize(input_data=None, compute_all_jacobians=False, execute=True)
Compute the Jacobians of some outputs with respect to some inputs.
- Parameters:
input_data (Mapping[str, Any] | None) – The input data for which to compute the Jacobian. If
None, use theMDODiscipline.default_inputs.compute_all_jacobians (bool) –
Whether to compute the Jacobians of all the output with respect to all the inputs. Otherwise, set the input variables against which to differentiate the output ones with
add_differentiated_inputs()and set these output variables to differentiate withadd_differentiated_outputs().By default it is set to False.
execute (bool) –
Whether to start by executing the discipline with the input data for which to compute the Jacobian; this allows to ensure that the discipline was executed with the right input data; it can be almost free if the corresponding output data have been stored in the
cache.By default it is set to True.
- Returns:
The Jacobian of the discipline shaped as
{output_name: {input_name: jacobian_array}}wherejacobian_array[i, j]is the partial derivative ofoutput_name[i]with respect toinput_name[j].- Raises:
ValueError – When either the inputs for which to differentiate the outputs or the outputs to differentiate are missing.
- Return type:
- notify_status_observers()
Notify all status observers that the status has changed.
- Return type:
None
- remove_status_observer(obs)
Remove an observer for the status.
- Parameters:
obs (Any) – The observer to remove.
- Return type:
None
- reset_statuses_for_run()
Set all the statuses to
MDODiscipline.ExecutionStatus.PENDING.- Raises:
ValueError – When the discipline cannot be run because of its status.
- Return type:
None
- set_cache_policy(cache_type=CacheType.SIMPLE, cache_tolerance=0.0, cache_hdf_file=None, cache_hdf_node_path=None, is_memory_shared=True)
Set the type of cache to use and the tolerance level.
This method defines when the output data have to be cached according to the distance between the corresponding input data and the input data already cached for which output data are also cached.
The cache can be either a
SimpleCacherecording the last execution or a cache storing all executions, e.g.MemoryFullCacheandHDF5Cache. Caching data can be either in-memory, e.g.SimpleCacheandMemoryFullCache, or on the disk, e.g.HDF5Cache.The attribute
CacheFactory.cachesprovides the available caches types.- Parameters:
cache_type (CacheType) –
The type of cache.
By default it is set to “SimpleCache”.
cache_tolerance (float) –
The maximum relative norm of the difference between two input arrays to consider that two input arrays are equal.
By default it is set to 0.0.
cache_hdf_file (str | Path | None) – The path to the HDF file to store the data; this argument is mandatory when the
MDODiscipline.CacheType.HDF5policy is used.cache_hdf_node_path (str | None) – The name of the HDF file node to store the discipline data, possibly passed as a path
root_name/.../group_name/.../node_name. IfNone,MDODiscipline.nameis used.is_memory_shared (bool) –
Whether to store the data with a shared memory dictionary, which makes the cache compatible with multiprocessing.
By default it is set to True.
- Return type:
None
- set_disciplines_statuses(status)
Set the sub-disciplines statuses.
To be implemented in subclasses.
- Parameters:
status (str) – The status.
- Return type:
None
- set_jacobian_approximation(jac_approx_type=ApproximationMode.FINITE_DIFFERENCES, jax_approx_step=1e-07, jac_approx_n_processes=1, jac_approx_use_threading=False, jac_approx_wait_time=0)
Set the Jacobian approximation method.
Sets the linearization mode to approx_method, sets the parameters of the approximation for further use when calling
MDODiscipline.linearize().- Parameters:
jac_approx_type (ApproximationMode) –
The approximation method, either “complex_step” or “finite_differences”.
By default it is set to “finite_differences”.
jax_approx_step (float) –
The differentiation step.
By default it is set to 1e-07.
jac_approx_n_processes (int) –
The maximum simultaneous number of threads, if
jac_approx_use_threadingis True, or processes otherwise, used to parallelize the execution.By default it is set to 1.
jac_approx_use_threading (bool) –
Whether to use threads instead of processes to parallelize the execution; multiprocessing will copy (serialize) all the disciplines, while threading will share all the memory This is important to note if you want to execute the same discipline multiple times, you shall use multiprocessing.
By default it is set to False.
jac_approx_wait_time (float) –
The time waited between two forks of the process / thread.
By default it is set to 0.
- Return type:
None
- set_linear_relationships(outputs=(), inputs=())
Set linear relationships between discipline inputs and outputs.
- Parameters:
outputs (Iterable[str]) –
The discipline output(s) in a linear relation with the input(s). If empty, all discipline outputs are considered.
By default it is set to ().
inputs (Iterable[str]) –
The discipline input(s) in a linear relation with the output(s). If empty, all discipline inputs are considered.
By default it is set to ().
- Return type:
None
- set_optimal_fd_step(outputs=None, inputs=None, compute_all_jacobians=False, print_errors=False, numerical_error=2.220446049250313e-16)
Compute the optimal finite-difference step.
Compute the optimal step for a forward first order finite differences gradient approximation. Requires a first evaluation of the perturbed functions values. The optimal step is reached when the truncation error (cut in the Taylor development), and the numerical cancellation errors (round-off when doing f(x+step)-f(x)) are approximately equal.
Warning
This calls the discipline execution twice per input variables.
See also
https://en.wikipedia.org/wiki/Numerical_differentiation and “Numerical Algorithms and Digital Representation”, Knut Morken , Chapter 11, “Numerical Differentiation”
- Parameters:
inputs (Iterable[str] | None) – The inputs wrt which the outputs are linearized. If
None, use theMDODiscipline._differentiated_inputs.outputs (Iterable[str] | None) – The outputs to be linearized. If
None, use theMDODiscipline._differentiated_outputs.compute_all_jacobians (bool) –
Whether to compute the Jacobians of all the output with respect to all the inputs. Otherwise, set the input variables against which to differentiate the output ones with
add_differentiated_inputs()and set these output variables to differentiate withadd_differentiated_outputs().By default it is set to False.
print_errors (bool) –
Whether to display the estimated errors.
By default it is set to False.
numerical_error (float) –
The numerical error associated to the calculation of f. By default, this is the machine epsilon (appx 1e-16), but can be higher when the calculation of f requires a numerical resolution.
By default it is set to 2.220446049250313e-16.
- Returns:
The estimated errors of truncation and cancellation error.
- Raises:
ValueError – When the Jacobian approximation method has not been set.
- Return type:
ndarray
- store_local_data(**kwargs)
Store discipline data in local data.
- Parameters:
**kwargs (Any) – The data to be stored in
MDODiscipline.local_data.- Return type:
None
- to_pickle(file_path)
Serialize the discipline and store it in a file.
- Parameters:
file_path (str | Path) – The path to the file to store the discipline.
- Return type:
None
- GRAMMAR_DIRECTORY: ClassVar[str | None] = None
The directory in which to search for the grammar files if not the class one.
- N_CPUS: Final[int] = 2
The number of available CPUs.
- activate_cache: bool = True
Whether to cache the discipline evaluations by default.
- activate_counters: ClassVar[bool] = True
Whether to activate the counters (execution time, calls and linearizations).
- activate_input_data_check: ClassVar[bool] = True
Whether to check the input data respect the input grammar.
- activate_output_data_check: ClassVar[bool] = True
Whether to check the output data respect the output grammar.
- cache: AbstractCache | None
The cache containing one or several executions of the discipline according to the cache policy.
- property cache_tol: float
The cache input tolerance.
This is the tolerance for equality of the inputs in the cache. If norm(stored_input_data-input_data) <= cache_tol * norm(stored_input_data), the cached data for
stored_input_datais returned when callingself.execute(input_data).- Raises:
ValueError – When the discipline does not have a cache.
- data_processor: DataProcessor
A tool to pre- and post-process discipline data.
- property default_inputs: Defaults
The default inputs.
- property default_outputs: Defaults
The default outputs used when
virtual_executionisTrue.
- property disciplines: list[MDODiscipline]
The sub-disciplines, if any.
- exec_for_lin: bool
Whether the last execution was due to a linearization.
- property exec_time: float | None
The cumulated execution time of the discipline.
This property is multiprocessing safe.
- Raises:
RuntimeError – When the discipline counters are disabled.
- property grammar_type: GrammarType
The type of grammar to be used for inputs and outputs declaration.
- input_grammar: BaseGrammar
The input grammar.
- jac: MutableMapping[str, MutableMapping[str, ndarray | csr_array | JacobianOperator]]
The Jacobians of the outputs wrt inputs.
The structure is
{output: {input: matrix}}.
- property linear_relationships: Mapping[str, Iterable[str]]
The linear relationships between inputs and outputs.
- property linearization_mode: LinearizationMode
The linearization mode among
MDODiscipline.LinearizationMode.- Raises:
ValueError – When the linearization mode is unknown.
- property local_data: DisciplineData
The current input and output data.
- property n_calls: int | None
The number of times the discipline was executed.
This property is multiprocessing safe.
- Raises:
RuntimeError – When the discipline counters are disabled.
- property n_calls_linearize: int | None
The number of times the discipline was linearized.
This property is multiprocessing safe.
- Raises:
RuntimeError – When the discipline counters are disabled.
- name: str
The name of the discipline.
- output_grammar: BaseGrammar
The output grammar.
- re_exec_policy: ReExecutionPolicy
The policy to re-execute the same discipline.
- residual_variables: dict[str, str]
The output variables mapping to their inputs, to be considered as residuals; they shall be equal to zero.
- run_solves_residuals: bool
Whether the run method shall solve the residuals.
- property status: ExecutionStatus
The status of the discipline.
The status aims at monitoring the process and give the user a simplified view on the state (the process state = execution or linearize or done) of the disciplines. The core part of the execution is _run, the core part of linearize is _compute_jacobian or approximate jacobian computation.
- time_stamps: ClassVar[dict[str, float] | None] = None
The mapping from discipline name to their execution time.
- virtual_execution: ClassVar[bool] = False
Whether to skip the
_run()method during execution and return thedefault_outputs, whatever the inputs.
Scalable model factory.
This module contains the ScalableModelFactory which is a factory
to create a ScalableModel from its class name by means of the
ScalableModelFactory.create() method. It is also possible to get a list
of available scalable models
(see ScalableModelFactory.scalable_models method)
and to check is a type of scalable model is available
(see ScalableModelFactory.is_available() method)
- class gemseo.problems.mdo.scalable.data_driven.factory.ScalableModelFactory[source]
This factory instantiates a class:.ScalableModel from its class name.
The class can be internal to GEMSEO or located in an external module whose path is provided to the constructor.
- Return type:
Any
- create(model_name, data, sizes=None, **parameters)[source]
Create a scalable model.
- Parameters:
- Returns:
The scalable model.
- Raises:
TypeError – If the class cannot be instantiated.
- Return type:
- get_class(name)
Return a class from its name.
- Parameters:
name (str) – The name of the class.
- Returns:
The class.
- Raises:
ImportError – If the class is not available.
- Return type:
type[T]
- get_default_option_values(name)
Return the constructor kwargs default values of a class.
- get_default_sub_option_values(name, **options)
Return the default values of the sub options of a class.
- Parameters:
- Returns:
The JSON grammar.
- Return type:
- get_library_name(name)
Return the name of the library related to the name of a class.
- get_options_doc(name)
Return the constructor documentation of a class.
- get_options_grammar(name, write_schema=False, schema_path='')
Return the options JSON grammar for a class.
Attempt to generate a JSONGrammar from the arguments of the __init__ method of the class.
- Parameters:
name (str) – The name of the class.
write_schema (bool) –
If
True, write the JSON schema to a file.By default it is set to False.
schema_path (Path | str) –
The path to the JSON schema file. If
None, the file is saved in the current directory in a file named after the name of the class.By default it is set to “”.
- Returns:
The JSON grammar.
- Return type:
- get_sub_options_grammar(name, **options)
Return the JSONGrammar of the sub options of a class.
- Parameters:
- Returns:
The JSON grammar.
- Return type:
- is_available(name)
Return whether a class can be instantiated.
- update()
Search for the classes that can be instantiated.
- The search is done in the following order:
The fully qualified module names
The plugin packages
The packages from the environment variables
- Return type:
None
- PLUGIN_ENTRY_POINT: ClassVar[str] = 'gemseo_plugins'
The name of the setuptools entry point for declaring plugins.
Scalable model.
This module implements the abstract concept of scalable model which is used by scalable disciplines. A scalable model is built from an input-output learning dataset associated with a function and generalizing its behavior to a new user-defined problem dimension, that is to say new user-defined input and output dimensions.
The concept of scalable model is implemented
through ScalableModel, an abstract class which is instantiated from:
data provided as a
Datasetvariables sizes provided as a dictionary whose keys are the names of inputs and outputs and values are their new sizes. If a variable is missing, its original size is considered.
Scalable model parameters can also be filled in. Otherwise, the model uses default values.
See also
The ScalableDiagonalModel class overloads ScalableModel.
- class gemseo.problems.mdo.scalable.data_driven.model.ScalableModel(data, sizes=None, **parameters)[source]
A scalable model.
- Parameters:
- build_model()[source]
Build model with original sizes for input and output variables.
- Return type:
None
- compute_bounds()[source]
Compute lower and upper bounds of both input and output variables.
- normalize_data()[source]
Normalize the dataset from lower and upper bounds.
- Return type:
None
- scalable_derivatives(input_value=None)[source]
Evaluate the scalable derivatives.
- Parameters:
input_value – The input values. If
None, use the default inputs.- Returns:
The evaluations of the scalable derivatives.
- Return type:
None
- scalable_function(input_value=None)[source]
Evaluate the scalable function.
- Parameters:
input_value – The input values. If
None, use the default inputs.- Returns:
The evaluations of the scalable function.
- Return type:
None
- data: IODataset
The learning dataset.
Scalable diagonal model.
This module implements the concept of scalable diagonal model, which is a particular scalable model built from an input-output dataset relying on a diagonal design of experiments (DOE) where inputs vary proportionally from their lower bounds to their upper bounds, following the diagonal of the input space.
So for every output, the dataset catches its evolution with respect to this proportion, which makes it a mono dimensional behavior. Then, for a new user-defined problem dimension, the scalable model extrapolates this mono dimensional behavior to the different input directions.
The concept of scalable diagonal model is implemented through
the ScalableDiagonalModel class
which is composed of a ScalableDiagonalApproximation.
With regard to the diagonal DOE, GEMSEO proposes the
DiagonalDOE class.
- class gemseo.problems.mdo.scalable.data_driven.diagonal.ScalableDiagonalApproximation(sizes, output_dependency, io_dependency, seed=0)[source]
Methodology that captures the trends of a physical problem.
It also extends it into a problem that has scalable input and outputs dimensions. The original and the resulting scalable problem have the same interface:
all inputs and outputs have the same names; only their dimensions vary.
- Parameters:
- build_scalable_function(function_name, dataset, input_names, degree=3)[source]
Create the interpolation functions for a specific output.
- Parameters:
- Returns:
The input and output samples scaled in [0, 1].
- Return type:
- get_scalable_derivative(output_function)[source]
Return the function computing the derivatives of an output.
- get_scalable_function(output_function)[source]
Return the function computing an output.
- class gemseo.problems.mdo.scalable.data_driven.diagonal.ScalableDiagonalModel(data, sizes=None, fill_factor=-1, comp_dep=None, inpt_dep=None, force_input_dependency=False, allow_unused_inputs=True, seed=0, group_dep=None)[source]
Scalable diagonal model.
- Parameters:
data (IODataset) – The input-output dataset.
sizes (Sequence[int] | None) – The sizes of the inputs and outputs. If
None, use the original sizes.fill_factor (float) –
The degree of sparsity of the dependency matrix.
By default it is set to -1.
comp_dep (NDArray[float]) – The matrix defining the selection of a single original component for each scalable component.
inpt_dep (NDArray[float]) – The input-output dependency matrix.
force_input_dependency (bool) –
Whether to force the dependency of each output with at least one input.
By default it is set to False.
allow_unused_inputs (bool) –
The possibility to have an input with no dependence with any output.
By default it is set to True.
seed (int) –
The seed for reproducible results.
By default it is set to 0.
group_dep (Mapping[str, Iterable[str]] | None) – The dependency between the inputs and outputs.
- build_model()[source]
Build the model with the original sizes for input and output variables.
- Returns:
The scalable approximation.
- Return type:
- compute_bounds()
Compute lower and upper bounds of both input and output variables.
- generate_random_dependency()[source]
Generate a random dependency structure for use in scalable discipline.
- normalize_data()
Normalize the dataset from lower and upper bounds.
- Return type:
None
- plot_1d_interpolations(save=False, show=False, step=0.01, varnames=None, directory='.', png=False)[source]
Plot the scaled 1D interpolations, a.k.a. the basis functions.
A basis function is a mono dimensional function interpolating the samples of a given output component over the input sampling line \(t\in[0,1]\mapsto \\underline{x}+t(\overline{x}-\\underline{x})\).
There are as many basis functions as there are output components from the discipline. Thus, for a discipline with a single output in dimension 1, there is 1 basis function. For a discipline with a single output in dimension 2, there are 2 basis functions. For a discipline with an output in dimension 2 and an output in dimension 13, there are 15 basis functions. And so on. This method allows to plot the basis functions associated with all outputs or only part of them, either on screen (
show=True), in a file (save=True) or both. We can also specify the discretizationstepwhose default value is0.01.- Parameters:
save (bool) –
Whether to save the figure.
By default it is set to False.
show (bool) –
Whether to display the figure.
By default it is set to False.
step (float) –
The step to evaluate the 1d interpolation function.
By default it is set to 0.01.
varnames (Sequence[str] | None) – The names of the variable to plot. If
None, all the variables are plotted.directory (str) –
The directory path.
By default it is set to “.”.
png (bool) –
Whether to use PNG file format instead of PDF.
By default it is set to False.
- Returns:
The names of the files.
- Return type:
- plot_dependency(add_levels=True, save=True, show=False, directory='.', png=False)[source]
Plot the dependency matrix of a discipline in the form of a chessboard.
The rows represent inputs, columns represent output and gray scale represents the dependency level between inputs and outputs.
- Parameters:
add_levels (bool) –
Whether to add the dependency levels in percentage.
By default it is set to True.
save (bool) –
Whether to save the figure.
By default it is set to True.
show (bool) –
Whether to display the figure.
By default it is set to False.
directory (str) –
The directory path.
By default it is set to “.”.
png (bool) –
Whether to use PNG file format instead of PDF.
By default it is set to False.
- Return type:
- scalable_derivatives(input_value=None)[source]
Compute the derivatives.
- scalable_function(input_value=None)[source]
Compute the outputs.
- data: IODataset
The learning dataset.