Note
Click here to download the full example code
MDO formulations for a toy example in aerostructure¶
from __future__ import absolute_import, division, print_function, unicode_literals
from copy import deepcopy
from future import standard_library
from gemseo.api import (
configure_logger,
create_discipline,
create_scenario,
generate_n2_plot,
)
from gemseo.problems.aerostructure.aerostructure_design_space import (
AerostructureDesignSpace,
)
configure_logger()
standard_library.install_aliases()
algo_options = {
"xtol_rel": 1e-8,
"xtol_abs": 1e-8,
"ftol_rel": 1e-8,
"ftol_abs": 1e-8,
"ineq_tolerance": 1e-5,
"eq_tolerance": 1e-3,
}
Create discipline¶
First, we create disciplines (aero, structure, mission) with dummy formulas
using the AnalyticDiscipline class.
aero_formulas = {
"drag": "0.1*((sweep/360)**2 + 200 + "
+ "thick_airfoils**2-thick_airfoils -4*displ)",
"forces": "10*sweep + 0.2*thick_airfoils-0.2*displ",
"lift": "(sweep + 0.2*thick_airfoils-2.*displ)/3000.",
}
aerodynamics = create_discipline(
"AnalyticDiscipline", name="Aerodynamics", expressions_dict=aero_formulas
)
struc_formulas = {
"mass": "4000*(sweep/360)**3 + 200000 + " + "100*thick_panels +200.0*forces",
"reserve_fact": "-3*sweep " + "-6*thick_panels+0.1*forces+55",
"displ": "2*sweep + 3*thick_panels-2.*forces",
}
structure = create_discipline(
"AnalyticDiscipline", name="Structure", expressions_dict=struc_formulas
)
mission_formulas = {"range": "8e11*lift/(mass*drag)"}
mission = create_discipline(
"AnalyticDiscipline", name="Mission", expressions_dict=mission_formulas
)
disciplines = [aerodynamics, structure, mission]
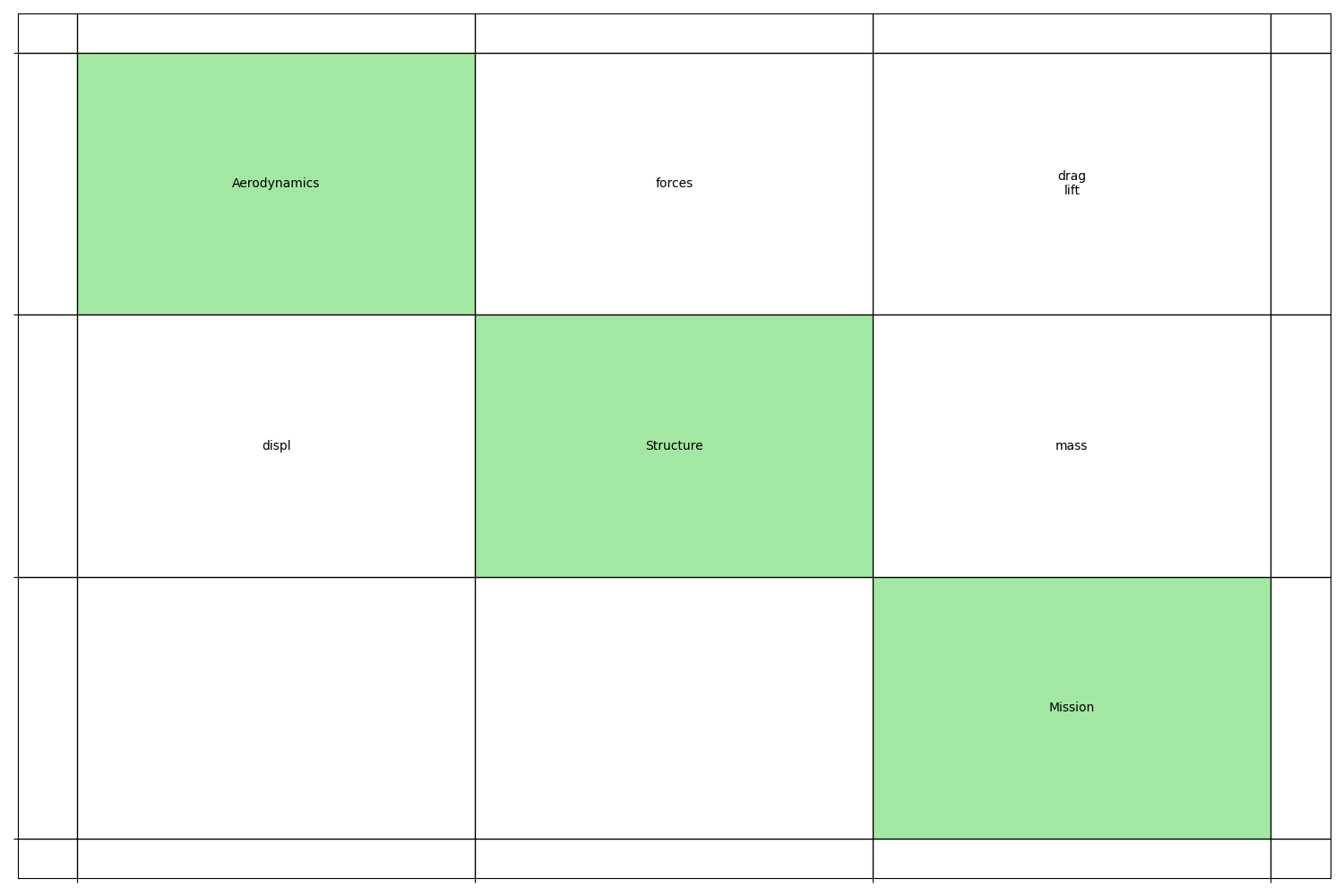
We can see that structure and aerodynamics are strongly coupled:
generate_n2_plot(disciplines, save=False, show=True)
Create a MDO scenario with MDF formulation¶
Then, we create a MDO scenario based on the MDF formulation
design_space = AerostructureDesignSpace()
scenario = create_scenario(
disciplines=disciplines,
formulation="MDF",
objective_name="range",
design_space=design_space,
maximize_objective=True,
)
scenario.add_constraint("reserve_fact", "ineq", value=0.5)
scenario.add_constraint("lift", "eq", value=0.5)
scenario.execute({"algo": "NLOPT_SLSQP", "max_iter": 10, "algo_options": algo_options})
scenario.post_process("OptHistoryView", save=False, show=True)

Out:
/home/docs/checkouts/readthedocs.org/user_builds/gemseo/conda/3.0.3/lib/python3.8/site-packages/gemseo/post/opt_history_view.py:312: UserWarning: FixedFormatter should only be used together with FixedLocator
ax1.set_yticklabels(y_labels)
/home/docs/checkouts/readthedocs.org/user_builds/gemseo/conda/3.0.3/lib/python3.8/site-packages/gemseo/post/opt_history_view.py:716: MatplotlibDeprecationWarning: default base will change from np.e to 10 in 3.4. To suppress this warning specify the base keyword argument.
norm=SymLogNorm(linthresh=linthresh, vmin=-vmax, vmax=vmax),
/home/docs/checkouts/readthedocs.org/user_builds/gemseo/conda/3.0.3/lib/python3.8/site-packages/gemseo/post/opt_history_view.py:626: MatplotlibDeprecationWarning: default base will change from np.e to 10 in 3.4. To suppress this warning specify the base keyword argument.
norm=SymLogNorm(linthresh=1.0, vmin=-vmax, vmax=vmax),
/home/docs/checkouts/readthedocs.org/user_builds/gemseo/conda/3.0.3/lib/python3.8/site-packages/gemseo/post/opt_history_view.py:619: MatplotlibDeprecationWarning: Passing parameters norm and vmin/vmax simultaneously is deprecated since 3.3 and will become an error two minor releases later. Please pass vmin/vmax directly to the norm when creating it.
im1 = ax1.imshow(
<gemseo.post.opt_history_view.OptHistoryView object at 0x7fc298922550>
Create a MDO scenario with bilevel formulation¶
Then, we create a MDO scenario based on the bilevel formulation
sub_scenario_options = {
"max_iter": 5,
"algo": "NLOPT_SLSQP",
"algo_options": algo_options,
}
design_space_ref = AerostructureDesignSpace()
Create the aeronautics sub-scenario¶
For this purpose, we create a first sub-scenario to maximize the range with respect to the thick airfoils, based on the aerodynamics discipline.
design_space_aero = deepcopy(design_space_ref).filter(["thick_airfoils"])
aero_scenario = create_scenario(
disciplines=[aerodynamics, mission],
formulation="DisciplinaryOpt",
objective_name="range",
design_space=design_space_aero,
maximize_objective=True,
)
aero_scenario.default_inputs = sub_scenario_options
Create the structure sub-scenario¶
We create a second sub-scenario to maximize the range with respect to the thick panels, based on the structure discipline.
design_space_struct = deepcopy(design_space_ref).filter(["thick_panels"])
struct_scenario = create_scenario(
disciplines=[structure, mission],
formulation="DisciplinaryOpt",
objective_name="range",
design_space=design_space_struct,
maximize_objective=True,
)
struct_scenario.default_inputs = sub_scenario_options
Create the system scenario¶
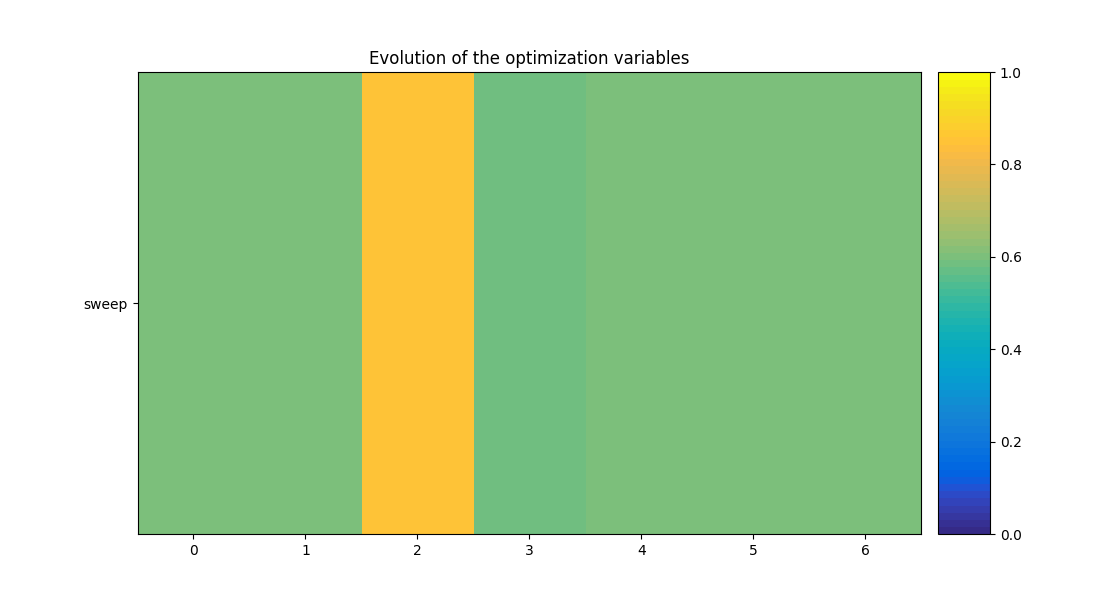
Lastly, we build a system scenario to maximize the range with respect to the sweep, which is a shared variable, based on the previous sub-scenarios.
design_space_system = deepcopy(design_space_ref).filter(["sweep"])
system_scenario = create_scenario(
disciplines=[aero_scenario, struct_scenario, mission],
formulation="BiLevel",
objective_name="range",
design_space=design_space_system,
maximize_objective=True,
mda_name="MDAJacobi",
tolerance=1e-8,
)
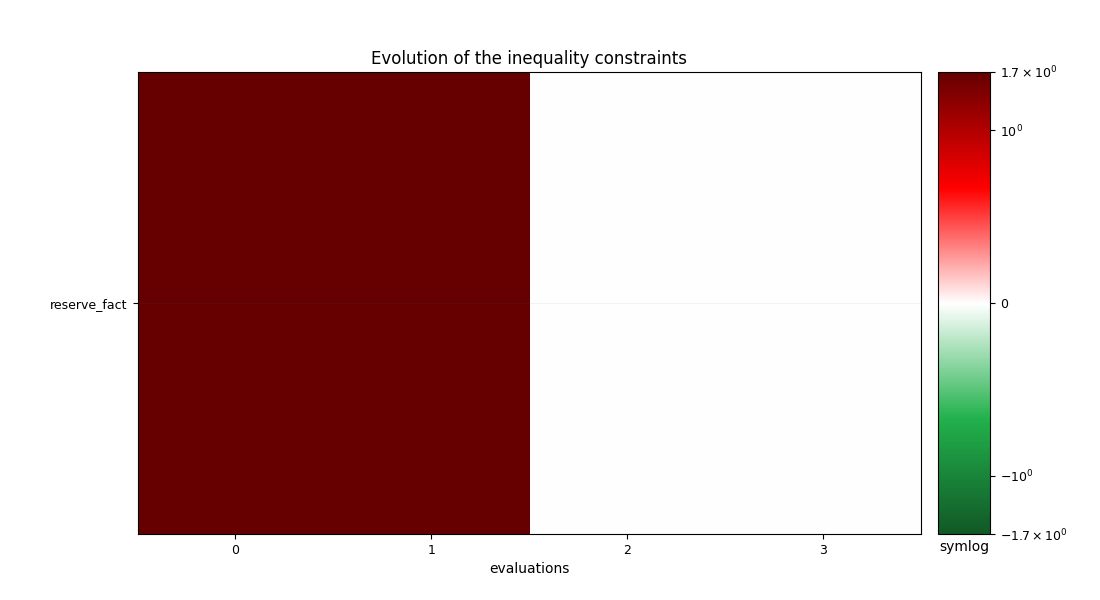
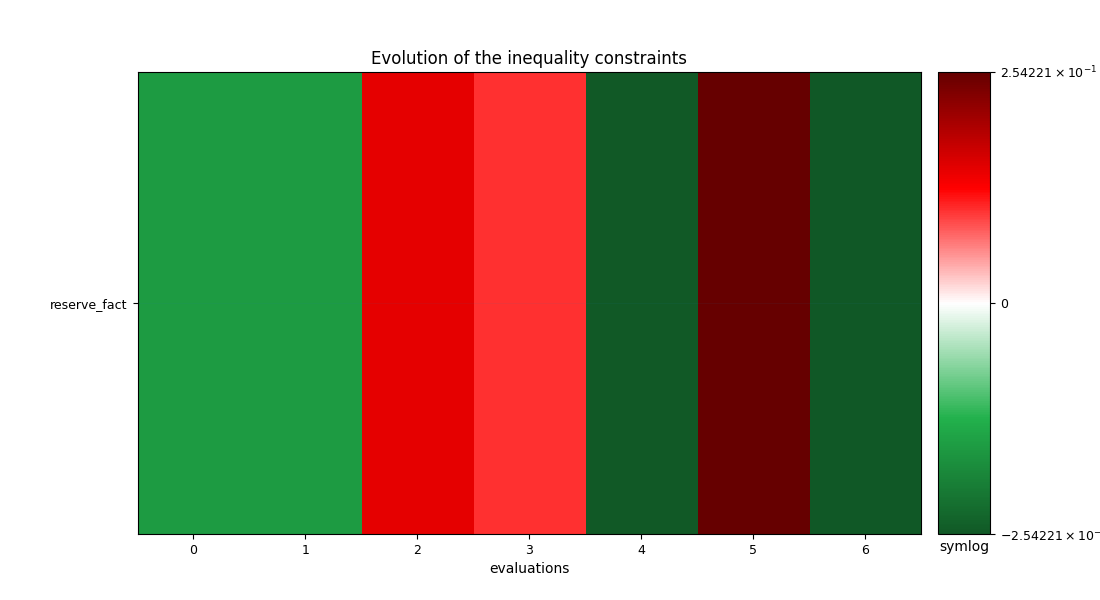
system_scenario.add_constraint("reserve_fact", "ineq", value=0.5)
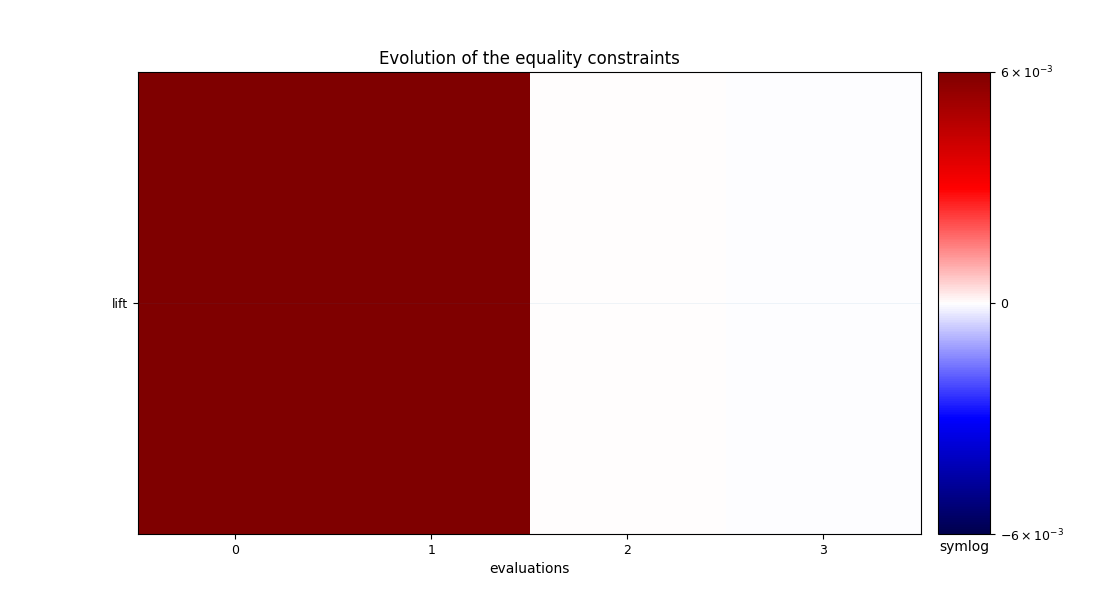
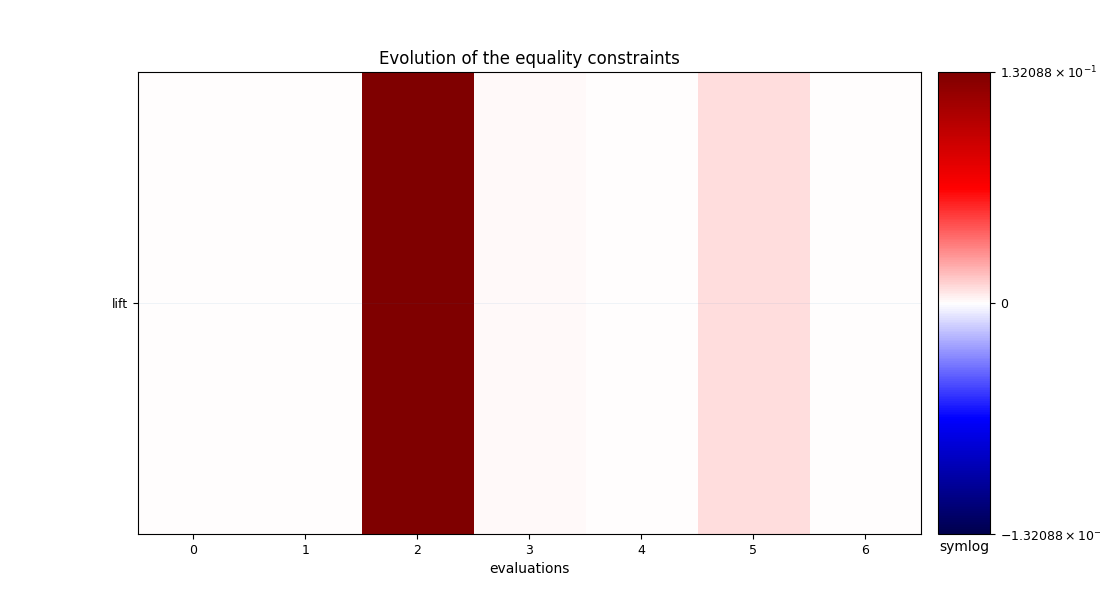
system_scenario.add_constraint("lift", "eq", value=0.5)
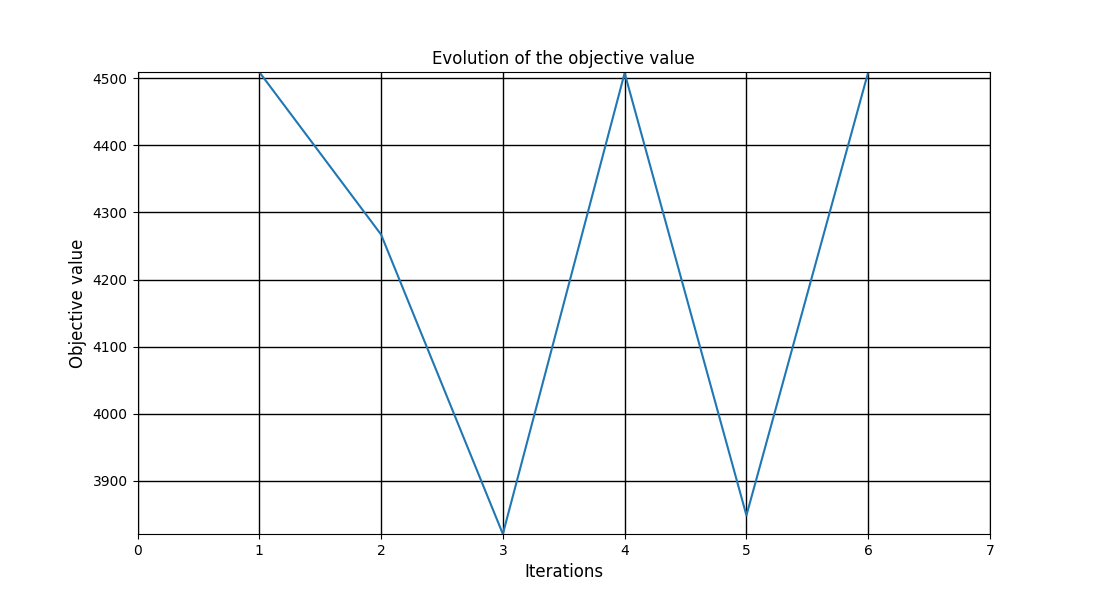
system_scenario.execute(
{"algo": "NLOPT_COBYLA", "max_iter": 7, "algo_options": algo_options}
)
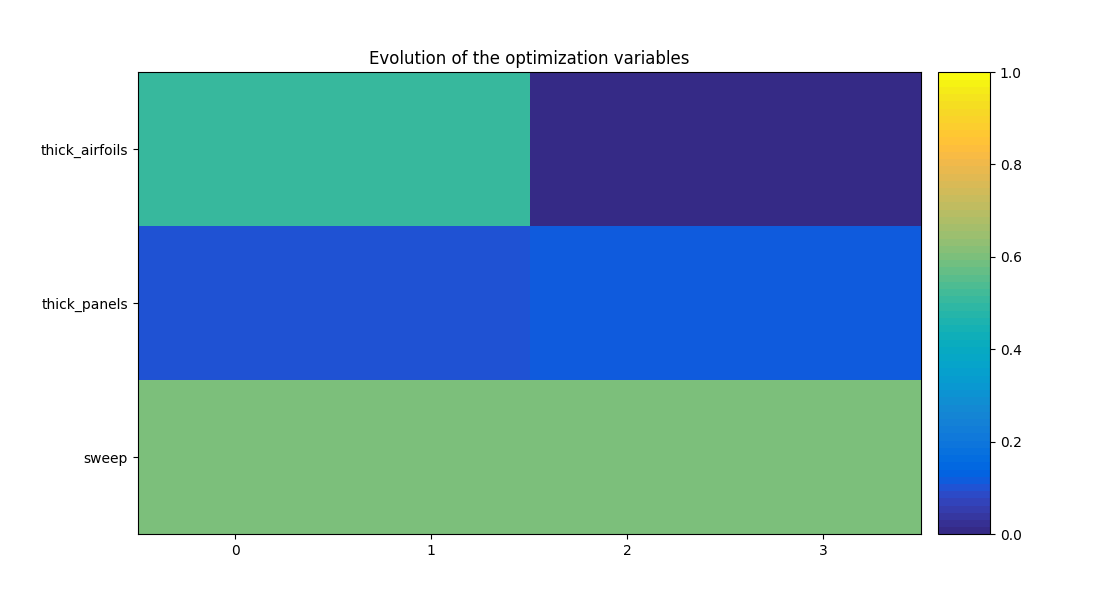
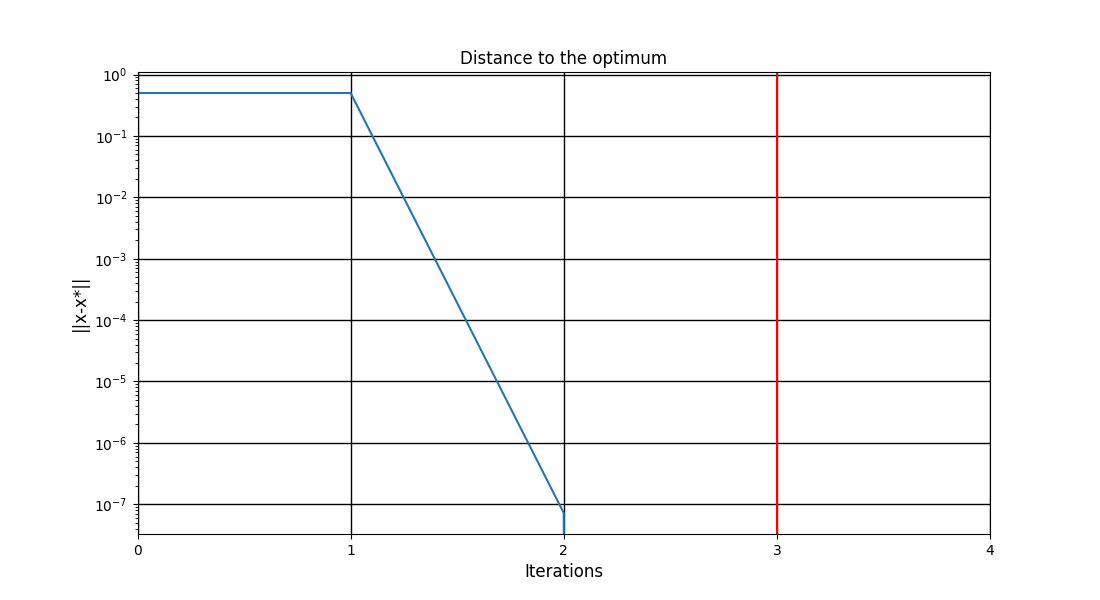
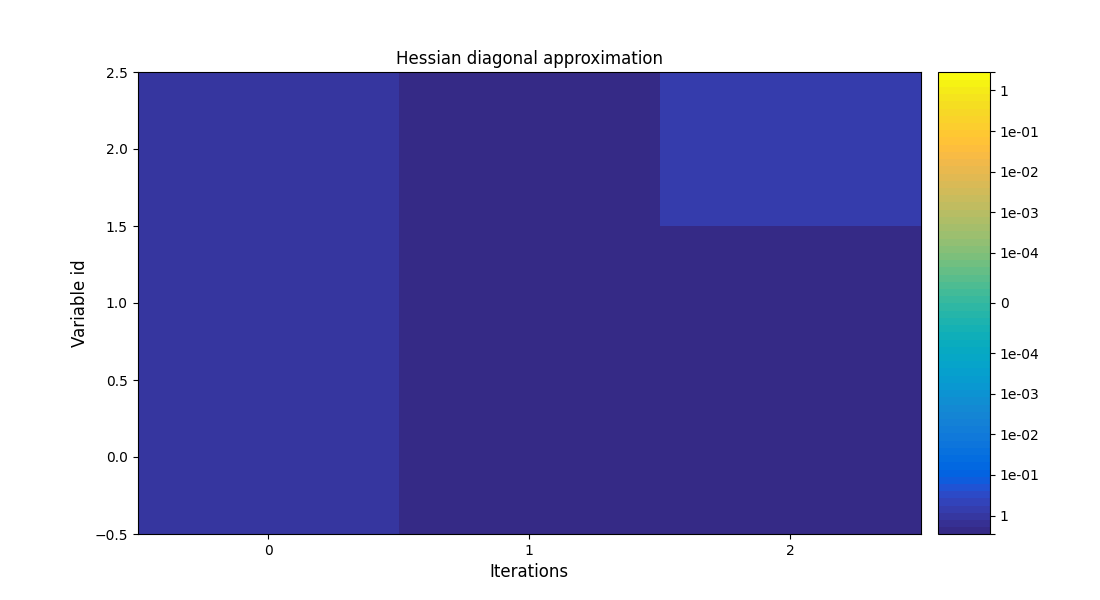
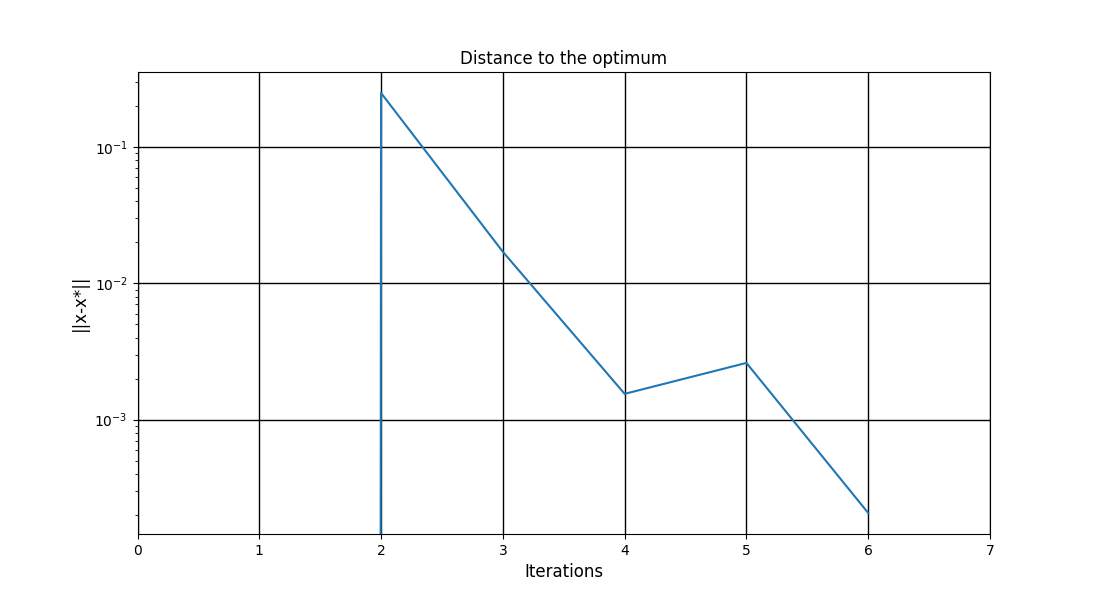
system_scenario.post_process("OptHistoryView", save=False, show=True)
Out:
/home/docs/checkouts/readthedocs.org/user_builds/gemseo/conda/3.0.3/lib/python3.8/site-packages/gemseo/post/opt_history_view.py:312: UserWarning: FixedFormatter should only be used together with FixedLocator
ax1.set_yticklabels(y_labels)
/home/docs/checkouts/readthedocs.org/user_builds/gemseo/conda/3.0.3/lib/python3.8/site-packages/gemseo/post/opt_history_view.py:626: MatplotlibDeprecationWarning: default base will change from np.e to 10 in 3.4. To suppress this warning specify the base keyword argument.
norm=SymLogNorm(linthresh=1.0, vmin=-vmax, vmax=vmax),
/home/docs/checkouts/readthedocs.org/user_builds/gemseo/conda/3.0.3/lib/python3.8/site-packages/gemseo/post/opt_history_view.py:619: MatplotlibDeprecationWarning: Passing parameters norm and vmin/vmax simultaneously is deprecated since 3.3 and will become an error two minor releases later. Please pass vmin/vmax directly to the norm when creating it.
im1 = ax1.imshow(
<gemseo.post.opt_history_view.OptHistoryView object at 0x7fc299651fa0>
Total running time of the script: ( 0 minutes 4.089 seconds)