Note
Click here to download the full example code
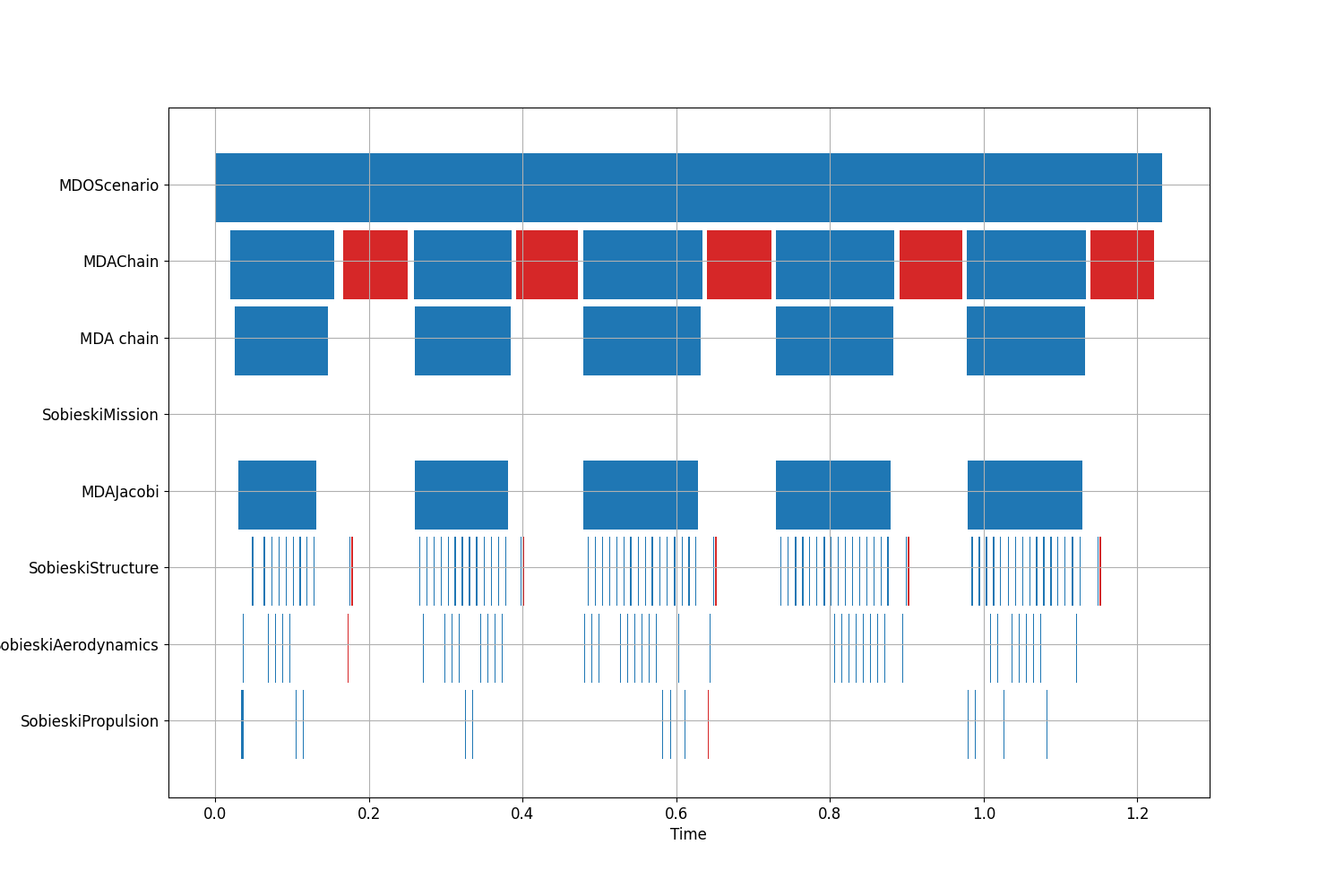
Gantt Chart¶
In this example, we illustrate the use of the Gantt chart plot on the Sobieski’s SSBJ problem.
Import¶
The first step is to import some functions from the API and a method to get the design space.
from gemseo.api import configure_logger
from gemseo.api import create_discipline
from gemseo.api import create_scenario
from gemseo.core.discipline import MDODiscipline
from gemseo.post.core.gantt_chart import create_gantt_chart
from gemseo.problems.sobieski.core.problem import SobieskiProblem
from matplotlib import pyplot as plt
configure_logger()
Out:
<RootLogger root (INFO)>
Create disciplines¶
Then, we instantiate the disciplines of the Sobieski’s SSBJ problem: Propulsion, Aerodynamics, Structure and Mission
disciplines = create_discipline(
[
"SobieskiPropulsion",
"SobieskiAerodynamics",
"SobieskiStructure",
"SobieskiMission",
]
)
Create design space¶
We also read the design space from the SobieskiProblem.
design_space = SobieskiProblem().design_space
Create and execute scenario¶
The next step is to build an MDO scenario in order to maximize the range, encoded ‘y_4’, with respect to the design parameters, while satisfying the inequality constraints ‘g_1’, ‘g_2’ and ‘g_3’. We can use the MDF formulation, the SLSQP optimization algorithm and a maximum number of iterations equal to 100.
scenario = create_scenario(
disciplines,
formulation="MDF",
objective_name="y_4",
maximize_objective=True,
design_space=design_space,
)
for constraint in ["g_1", "g_2", "g_3"]:
scenario.add_constraint(constraint, "ineq")
Activate time stamps¶
In order to record all time stamps recording, we have to call this method before the execution of the scenarios
MDODiscipline.activate_time_stamps()
scenario.execute({"algo": "SLSQP", "max_iter": 10})
Out:
INFO - 10:02:35:
INFO - 10:02:35: *** Start MDOScenario execution ***
INFO - 10:02:35: MDOScenario
INFO - 10:02:35: Disciplines: SobieskiPropulsion SobieskiAerodynamics SobieskiStructure SobieskiMission
INFO - 10:02:35: MDO formulation: MDF
INFO - 10:02:35: Optimization problem:
INFO - 10:02:35: minimize -y_4(x_shared, x_1, x_2, x_3)
INFO - 10:02:35: with respect to x_1, x_2, x_3, x_shared
INFO - 10:02:35: subject to constraints:
INFO - 10:02:35: g_1(x_shared, x_1, x_2, x_3) <= 0.0
INFO - 10:02:35: g_2(x_shared, x_1, x_2, x_3) <= 0.0
INFO - 10:02:35: g_3(x_shared, x_1, x_2, x_3) <= 0.0
INFO - 10:02:35: over the design space:
INFO - 10:02:35: +----------+-------------+-------+-------------+-------+
INFO - 10:02:35: | name | lower_bound | value | upper_bound | type |
INFO - 10:02:35: +----------+-------------+-------+-------------+-------+
INFO - 10:02:35: | x_shared | 0.01 | 0.05 | 0.09 | float |
INFO - 10:02:35: | x_shared | 30000 | 45000 | 60000 | float |
INFO - 10:02:35: | x_shared | 1.4 | 1.6 | 1.8 | float |
INFO - 10:02:35: | x_shared | 2.5 | 5.5 | 8.5 | float |
INFO - 10:02:35: | x_shared | 40 | 55 | 70 | float |
INFO - 10:02:35: | x_shared | 500 | 1000 | 1500 | float |
INFO - 10:02:35: | x_1 | 0.1 | 0.25 | 0.4 | float |
INFO - 10:02:35: | x_1 | 0.75 | 1 | 1.25 | float |
INFO - 10:02:35: | x_2 | 0.75 | 1 | 1.25 | float |
INFO - 10:02:35: | x_3 | 0.1 | 0.5 | 1 | float |
INFO - 10:02:35: +----------+-------------+-------+-------------+-------+
INFO - 10:02:35: Solving optimization problem with algorithm SLSQP:
INFO - 10:02:35: ... 0%| | 0/10 [00:00<?, ?it]
INFO - 10:02:35: ... 10%|█ | 1/10 [00:00<00:00, 66.66 it/sec]
INFO - 10:02:36: ... 20%|██ | 2/10 [00:00<00:00, 26.68 it/sec, obj=-2.12e+3]
INFO - 10:02:36: ... 30%|███ | 3/10 [00:00<00:00, 16.06 it/sec, obj=-3.15e+3]
INFO - 10:02:36: ... 40%|████ | 4/10 [00:00<00:00, 11.45 it/sec, obj=-3.96e+3]
INFO - 10:02:36: ... 50%|█████ | 5/10 [00:01<00:00, 8.91 it/sec, obj=-3.98e+3]
INFO - 10:02:36: ... 50%|█████ | 5/10 [00:01<00:00, 8.23 it/sec, obj=-3.98e+3]
INFO - 10:02:36: Optimization result:
INFO - 10:02:36: Optimizer info:
INFO - 10:02:36: Status: 8
INFO - 10:02:36: Message: Positive directional derivative for linesearch
INFO - 10:02:36: Number of calls to the objective function by the optimizer: 6
INFO - 10:02:36: Solution:
INFO - 10:02:36: The solution is feasible.
INFO - 10:02:36: Objective: -3960.1367790933214
INFO - 10:02:36: Standardized constraints:
INFO - 10:02:36: g_1 = [-0.01805983 -0.03334555 -0.04424879 -0.05183405 -0.05732561 -0.13720865
INFO - 10:02:36: -0.10279135]
INFO - 10:02:36: g_2 = 2.9360600315442298e-06
INFO - 10:02:36: g_3 = [-0.76310174 -0.23689826 -0.00553375 -0.183255 ]
INFO - 10:02:36: Design space:
INFO - 10:02:36: +----------+-------------+---------------------+-------------+-------+
INFO - 10:02:36: | name | lower_bound | value | upper_bound | type |
INFO - 10:02:36: +----------+-------------+---------------------+-------------+-------+
INFO - 10:02:36: | x_shared | 0.01 | 0.06000073401500788 | 0.09 | float |
INFO - 10:02:36: | x_shared | 30000 | 60000 | 60000 | float |
INFO - 10:02:36: | x_shared | 1.4 | 1.4 | 1.8 | float |
INFO - 10:02:36: | x_shared | 2.5 | 2.5 | 8.5 | float |
INFO - 10:02:36: | x_shared | 40 | 70 | 70 | float |
INFO - 10:02:36: | x_shared | 500 | 1500 | 1500 | float |
INFO - 10:02:36: | x_1 | 0.1 | 0.4 | 0.4 | float |
INFO - 10:02:36: | x_1 | 0.75 | 0.75 | 1.25 | float |
INFO - 10:02:36: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 10:02:36: | x_3 | 0.1 | 0.1553801266337427 | 1 | float |
INFO - 10:02:36: +----------+-------------+---------------------+-------------+-------+
INFO - 10:02:36: *** End MDOScenario execution (time: 0:00:01.232317) ***
{'max_iter': 10, 'algo': 'SLSQP'}
Post-process scenario¶
Lastly, we plot the Gantt chart.
create_gantt_chart(show=False, save=False)
# Workaround for HTML rendering, instead of ``show=True``
plt.show()
# Finally, we deactivate the time stamps for other executions
MDODiscipline.deactivate_time_stamps()
Out:
/home/docs/checkouts/readthedocs.org/user_builds/gemseo/envs/4.0.1/lib/python3.9/site-packages/gemseo/post/core/gantt_chart.py:87: UserWarning: FixedFormatter should only be used together with FixedLocator
ax.set_yticklabels(disc_names)
Total running time of the script: ( 0 minutes 1.533 seconds)