Note
Click here to download the full example code
BiLevel-based MDO on the Sobieski SSBJ test case¶
from __future__ import annotations
from copy import deepcopy
from gemseo.api import configure_logger
from gemseo.api import create_discipline
from gemseo.api import create_scenario
from gemseo.api import execute_post
from gemseo.problems.sobieski.core.problem import SobieskiProblem
configure_logger()
<RootLogger root (INFO)>
Instantiate the disciplines¶
First, we instantiate the four disciplines of the use case:
SobieskiPropulsion,
SobieskiAerodynamics,
SobieskiMission
and SobieskiStructure.
propu, aero, mission, struct = create_discipline(
[
"SobieskiPropulsion",
"SobieskiAerodynamics",
"SobieskiMission",
"SobieskiStructure",
]
)
Build, execute and post-process the scenario¶
Then, we build the scenario which links the disciplines
with the formulation and the optimization algorithm. Here, we use the
BiLevel formulation. We tell the scenario to minimize -y_4
instead of minimizing y_4 (range), which is the default option.
We need to define the design space.
design_space = SobieskiProblem().design_space
Then, we build a sub-scenario for each strongly coupled disciplines, using the following algorithm, maximum number of iterations and algorithm options:
algo_options = {
"xtol_rel": 1e-7,
"xtol_abs": 1e-7,
"ftol_rel": 1e-7,
"ftol_abs": 1e-7,
"ineq_tolerance": 1e-4,
}
sub_sc_opts = {"max_iter": 30, "algo": "SLSQP", "algo_options": algo_options}
Build a sub-scenario for Propulsion¶
This sub-scenario will minimize SFC.
sc_prop = create_scenario(
propu,
"DisciplinaryOpt",
"y_34",
design_space=deepcopy(design_space).filter("x_3"),
name="PropulsionScenario",
)
sc_prop.default_inputs = sub_sc_opts
sc_prop.add_constraint("g_3", constraint_type="ineq")
Build a sub-scenario for Aerodynamics¶
This sub-scenario will minimize L/D.
sc_aero = create_scenario(
aero,
"DisciplinaryOpt",
"y_24",
deepcopy(design_space).filter("x_2"),
name="AerodynamicsScenario",
maximize_objective=True,
)
sc_aero.default_inputs = sub_sc_opts
sc_aero.add_constraint("g_2", constraint_type="ineq")
Build a sub-scenario for Structure¶
This sub-scenario will maximize log(aircraft total weight / (aircraft total weight - fuel weight)).
sc_str = create_scenario(
struct,
"DisciplinaryOpt",
"y_11",
deepcopy(design_space).filter("x_1"),
name="StructureScenario",
maximize_objective=True,
)
sc_str.add_constraint("g_1", constraint_type="ineq")
sc_str.default_inputs = sub_sc_opts
Build a scenario for Mission¶
This scenario is based on the three previous sub-scenarios and on the Mission and aims to maximize the range (Breguet).
sub_disciplines = [sc_prop, sc_aero, sc_str] + [mission]
design_space = deepcopy(design_space).filter("x_shared")
system_scenario = create_scenario(
sub_disciplines,
"BiLevel",
"y_4",
design_space,
apply_cstr_tosub_scenarios=False,
parallel_scenarios=False,
multithread_scenarios=True,
tolerance=1e-14,
max_mda_iter=30,
maximize_objective=True,
)
system_scenario.add_constraint(["g_1", "g_2", "g_3"], "ineq")
# system_scenario.xdsmize(open_browser=True)
system_scenario.execute(
{"max_iter": 50, "algo": "NLOPT_COBYLA", "algo_options": algo_options}
)
INFO - 16:58:10:
INFO - 16:58:10: *** Start MDOScenario execution ***
INFO - 16:58:10: MDOScenario
INFO - 16:58:10: Disciplines: AerodynamicsScenario PropulsionScenario SobieskiMission StructureScenario
INFO - 16:58:10: MDO formulation: BiLevel
INFO - 16:58:10: Optimization problem:
INFO - 16:58:10: minimize -y_4(x_shared) = -y_4(x_shared)
INFO - 16:58:10: with respect to x_shared
INFO - 16:58:10: subject to constraints:
INFO - 16:58:10: g_1_g_2_g_3(x_shared) <= 0.0
INFO - 16:58:10: over the design space:
INFO - 16:58:10: +-------------+-------------+-------+-------------+-------+
INFO - 16:58:10: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:10: +-------------+-------------+-------+-------------+-------+
INFO - 16:58:10: | x_shared[0] | 0.01 | 0.05 | 0.09 | float |
INFO - 16:58:10: | x_shared[1] | 30000 | 45000 | 60000 | float |
INFO - 16:58:10: | x_shared[2] | 1.4 | 1.6 | 1.8 | float |
INFO - 16:58:10: | x_shared[3] | 2.5 | 5.5 | 8.5 | float |
INFO - 16:58:10: | x_shared[4] | 40 | 55 | 70 | float |
INFO - 16:58:10: | x_shared[5] | 500 | 1000 | 1500 | float |
INFO - 16:58:10: +-------------+-------------+-------+-------------+-------+
INFO - 16:58:10: Solving optimization problem with algorithm NLOPT_COBYLA:
INFO - 16:58:10: ... 0%| | 0/50 [00:00<?, ?it]
INFO - 16:58:10:
INFO - 16:58:10: *** Start PropulsionScenario execution ***
INFO - 16:58:10: PropulsionScenario
INFO - 16:58:10: Disciplines: SobieskiPropulsion
INFO - 16:58:10: MDO formulation: DisciplinaryOpt
INFO - 16:58:10: Optimization problem:
INFO - 16:58:10: minimize y_34(x_3)
INFO - 16:58:10: with respect to x_3
INFO - 16:58:10: subject to constraints:
INFO - 16:58:10: g_3(x_3) <= 0.0
INFO - 16:58:10: over the design space:
INFO - 16:58:10: +------+-------------+-------+-------------+-------+
INFO - 16:58:10: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:10: +------+-------------+-------+-------------+-------+
INFO - 16:58:10: | x_3 | 0.1 | 0.5 | 1 | float |
INFO - 16:58:10: +------+-------------+-------+-------------+-------+
INFO - 16:58:10: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:10: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:10:
INFO - 16:58:10: ... 3%|▎ | 1/30 [00:00<00:00, 1687.85 it/sec, obj=1.11]
INFO - 16:58:10:
INFO - 16:58:10: ... 7%|▋ | 2/30 [00:00<00:00, 480.17 it/sec, obj=1.14]
INFO - 16:58:10:
INFO - 16:58:10: ... 10%|█ | 3/30 [00:00<00:00, 550.67 it/sec, obj=1.1]
INFO - 16:58:10:
INFO - 16:58:10: ... 13%|█▎ | 4/30 [00:00<00:00, 467.85 it/sec, obj=1.11]
INFO - 16:58:10:
INFO - 16:58:10:
INFO - 16:58:10: Optimization result:
INFO - 16:58:10: Optimizer info:
INFO - 16:58:10: Status: 8
INFO - 16:58:10: Message: Positive directional derivative for linesearch
INFO - 16:58:10: Number of calls to the objective function by the optimizer: 13
INFO - 16:58:10: Solution:
INFO - 16:58:10: The solution is feasible.
INFO - 16:58:10: Objective: 1.1087874739328383
INFO - 16:58:10: Standardized constraints:
INFO - 16:58:10: g_3 = [-0.91571362 -0.08428638 0. -0.05794805]
INFO - 16:58:10: Design space:
INFO - 16:58:10: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:10: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:10: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:10: | x_3 | 0.1 | 0.4302702621790957 | 1 | float |
INFO - 16:58:10: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:10: *** End PropulsionScenario execution (time: 0:00:00.025073) ***
INFO - 16:58:10:
INFO - 16:58:10: *** Start AerodynamicsScenario execution ***
INFO - 16:58:10: AerodynamicsScenario
INFO - 16:58:10: Disciplines: SobieskiAerodynamics
INFO - 16:58:10: MDO formulation: DisciplinaryOpt
INFO - 16:58:10: Optimization problem:
INFO - 16:58:10: minimize -y_24(x_2) = -y_24(x_2)
INFO - 16:58:10: with respect to x_2
INFO - 16:58:10: subject to constraints:
INFO - 16:58:10: g_2(x_2) <= 0.0
INFO - 16:58:10: over the design space:
INFO - 16:58:10: +------+-------------+-------+-------------+-------+
INFO - 16:58:10: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:10: +------+-------------+-------+-------------+-------+
INFO - 16:58:10: | x_2 | 0.75 | 1 | 1.25 | float |
INFO - 16:58:10: +------+-------------+-------+-------------+-------+
INFO - 16:58:10: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:10: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:10:
INFO - 16:58:10: ... 3%|▎ | 1/30 [00:00<00:00, 1006.31 it/sec, obj=-4.15]
INFO - 16:58:10:
INFO - 16:58:10: ... 7%|▋ | 2/30 [00:00<00:00, 426.36 it/sec, obj=-4.22]
INFO - 16:58:10:
INFO - 16:58:10: ... 10%|█ | 3/30 [00:00<00:00, 401.19 it/sec, obj=-4.28]
INFO - 16:58:10:
INFO - 16:58:10:
INFO - 16:58:10: Optimization result:
INFO - 16:58:10: Optimizer info:
INFO - 16:58:10: Status: 8
INFO - 16:58:10: Message: Positive directional derivative for linesearch
INFO - 16:58:10: Number of calls to the objective function by the optimizer: 4
INFO - 16:58:10: Solution:
INFO - 16:58:10: The solution is feasible.
INFO - 16:58:10: Objective: -4.283343558640357
INFO - 16:58:10: Standardized constraints:
INFO - 16:58:10: g_2 = -0.040000000000000036
INFO - 16:58:10: Design space:
INFO - 16:58:10: +------+-------------+-------+-------------+-------+
INFO - 16:58:10: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:10: +------+-------------+-------+-------------+-------+
INFO - 16:58:10: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:10: +------+-------------+-------+-------------+-------+
INFO - 16:58:10: *** End AerodynamicsScenario execution (time: 0:00:00.019473) ***
INFO - 16:58:10:
INFO - 16:58:10: *** Start StructureScenario execution ***
INFO - 16:58:10: StructureScenario
INFO - 16:58:10: Disciplines: SobieskiStructure
INFO - 16:58:10: MDO formulation: DisciplinaryOpt
INFO - 16:58:10: Optimization problem:
INFO - 16:58:10: minimize -y_11(x_1) = -y_11(x_1)
INFO - 16:58:10: with respect to x_1
INFO - 16:58:10: subject to constraints:
INFO - 16:58:10: g_1(x_1) <= 0.0
INFO - 16:58:10: over the design space:
INFO - 16:58:10: +--------+-------------+-------+-------------+-------+
INFO - 16:58:10: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:10: +--------+-------------+-------+-------------+-------+
INFO - 16:58:10: | x_1[0] | 0.1 | 0.25 | 0.4 | float |
INFO - 16:58:10: | x_1[1] | 0.75 | 1 | 1.25 | float |
INFO - 16:58:10: +--------+-------------+-------+-------------+-------+
INFO - 16:58:10: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:10: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:10:
INFO - 16:58:10: ... 3%|▎ | 1/30 [00:00<00:00, 642.31 it/sec, obj=-.152]
INFO - 16:58:10:
INFO - 16:58:10: ... 7%|▋ | 2/30 [00:00<00:00, 270.17 it/sec, obj=-.143]
INFO - 16:58:10:
INFO - 16:58:10: ... 10%|█ | 3/30 [00:00<00:00, 244.88 it/sec, obj=-.144]
INFO - 16:58:10:
INFO - 16:58:10: ... 13%|█▎ | 4/30 [00:00<00:00, 228.44 it/sec, obj=-.146]
INFO - 16:58:10:
INFO - 16:58:10: ... 17%|█▋ | 5/30 [00:00<00:00, 216.30 it/sec, obj=-.155]
INFO - 16:58:10:
INFO - 16:58:10: ... 20%|██ | 6/30 [00:00<00:00, 211.68 it/sec, obj=-.156]
INFO - 16:58:10:
INFO - 16:58:10: ... 23%|██▎ | 7/30 [00:00<00:00, 207.93 it/sec, obj=-.156]
INFO - 16:58:10:
INFO - 16:58:10: ... 27%|██▋ | 8/30 [00:00<00:00, 204.71 it/sec, obj=-.156]
INFO - 16:58:10:
INFO - 16:58:10: ... 30%|███ | 9/30 [00:00<00:00, 202.87 it/sec, obj=-.156]
INFO - 16:58:10:
INFO - 16:58:10:
INFO - 16:58:10: Optimization result:
INFO - 16:58:10: Optimizer info:
INFO - 16:58:10: Status: None
INFO - 16:58:10: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:58:10: Number of calls to the objective function by the optimizer: 10
INFO - 16:58:10: Solution:
INFO - 16:58:10: The solution is feasible.
INFO - 16:58:10: Objective: -0.15631824062042746
INFO - 16:58:10: Standardized constraints:
INFO - 16:58:10: g_1 = [ 3.99302813e-12 -2.99419226e-02 -4.49346629e-02 -5.39372764e-02
INFO - 16:58:10: -5.99419226e-02 -6.61963740e-02 -1.73803626e-01]
INFO - 16:58:10: Design space:
INFO - 16:58:10: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:10: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:10: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:10: | x_1[0] | 0.1 | 0.1 | 0.4 | float |
INFO - 16:58:10: | x_1[1] | 0.75 | 0.9857121415472604 | 1.25 | float |
INFO - 16:58:10: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:10: *** End StructureScenario execution (time: 0:00:00.054955) ***
INFO - 16:58:10: ... 2%|▏ | 1/50 [00:00<00:15, 3.23 it/sec, obj=-553]
INFO - 16:58:10:
INFO - 16:58:10: *** Start PropulsionScenario execution ***
INFO - 16:58:10: PropulsionScenario
INFO - 16:58:10: Disciplines: SobieskiPropulsion
INFO - 16:58:10: MDO formulation: DisciplinaryOpt
INFO - 16:58:10: Optimization problem:
INFO - 16:58:10: minimize y_34(x_3)
INFO - 16:58:10: with respect to x_3
INFO - 16:58:10: subject to constraints:
INFO - 16:58:10: g_3(x_3) <= 0.0
INFO - 16:58:10: over the design space:
INFO - 16:58:10: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:10: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:10: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:10: | x_3 | 0.1 | 0.4302702621790957 | 1 | float |
INFO - 16:58:10: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:10: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:10: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:10:
INFO - 16:58:10: ... 3%|▎ | 1/30 [00:00<00:00, 2257.43 it/sec, obj=1.11]
INFO - 16:58:10:
INFO - 16:58:10: ... 7%|▋ | 2/30 [00:00<00:00, 527.65 it/sec, obj=1.11]
INFO - 16:58:10:
INFO - 16:58:10:
INFO - 16:58:10: Optimization result:
INFO - 16:58:10: Optimizer info:
INFO - 16:58:10: Status: 8
INFO - 16:58:10: Message: Positive directional derivative for linesearch
INFO - 16:58:10: Number of calls to the objective function by the optimizer: 12
INFO - 16:58:10: Solution:
INFO - 16:58:10: The solution is feasible.
INFO - 16:58:10: Objective: 1.1087874739328383
INFO - 16:58:10: Standardized constraints:
INFO - 16:58:10: g_3 = [-0.75494685 -0.24505315 0. -0.05794805]
INFO - 16:58:10: Design space:
INFO - 16:58:10: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:10: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:10: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:10: | x_3 | 0.1 | 0.4302702621790957 | 1 | float |
INFO - 16:58:10: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:10: *** End PropulsionScenario execution (time: 0:00:00.013424) ***
INFO - 16:58:10:
INFO - 16:58:10: *** Start AerodynamicsScenario execution ***
INFO - 16:58:10: AerodynamicsScenario
INFO - 16:58:10: Disciplines: SobieskiAerodynamics
INFO - 16:58:10: MDO formulation: DisciplinaryOpt
INFO - 16:58:10: Optimization problem:
INFO - 16:58:10: minimize -y_24(x_2) = -y_24(x_2)
INFO - 16:58:10: with respect to x_2
INFO - 16:58:10: subject to constraints:
INFO - 16:58:10: g_2(x_2) <= 0.0
INFO - 16:58:10: over the design space:
INFO - 16:58:10: +------+-------------+-------+-------------+-------+
INFO - 16:58:10: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:10: +------+-------------+-------+-------------+-------+
INFO - 16:58:10: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:10: +------+-------------+-------+-------------+-------+
INFO - 16:58:10: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:10: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:10:
INFO - 16:58:10: ... 3%|▎ | 1/30 [00:00<00:00, 1165.73 it/sec, obj=-3.46]
INFO - 16:58:10:
WARNING - 16:58:10: Optimization found no feasible point ! The least infeasible point is selected.
INFO - 16:58:10:
INFO - 16:58:10: Optimization result:
INFO - 16:58:10: Optimizer info:
INFO - 16:58:10: Status: 8
INFO - 16:58:10: Message: Positive directional derivative for linesearch
INFO - 16:58:10: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:10: Solution:
WARNING - 16:58:10: The solution is not feasible.
INFO - 16:58:10: Objective: -3.456006478817154
INFO - 16:58:10: Standardized constraints:
INFO - 16:58:10: g_2 = 0.010000000000000009
INFO - 16:58:10: Design space:
INFO - 16:58:10: +------+-------------+-------+-------------+-------+
INFO - 16:58:10: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:10: +------+-------------+-------+-------------+-------+
INFO - 16:58:10: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:10: +------+-------------+-------+-------------+-------+
INFO - 16:58:10: *** End AerodynamicsScenario execution (time: 0:00:00.006893) ***
INFO - 16:58:10:
INFO - 16:58:10: *** Start StructureScenario execution ***
INFO - 16:58:10: StructureScenario
INFO - 16:58:10: Disciplines: SobieskiStructure
INFO - 16:58:10: MDO formulation: DisciplinaryOpt
INFO - 16:58:10: Optimization problem:
INFO - 16:58:10: minimize -y_11(x_1) = -y_11(x_1)
INFO - 16:58:10: with respect to x_1
INFO - 16:58:10: subject to constraints:
INFO - 16:58:10: g_1(x_1) <= 0.0
INFO - 16:58:10: over the design space:
INFO - 16:58:10: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:10: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:10: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:10: | x_1[0] | 0.1 | 0.1 | 0.4 | float |
INFO - 16:58:10: | x_1[1] | 0.75 | 0.9857121415472604 | 1.25 | float |
INFO - 16:58:10: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:10: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:10: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:10:
INFO - 16:58:10: ... 3%|▎ | 1/30 [00:00<00:00, 698.93 it/sec, obj=-.193]
INFO - 16:58:10:
INFO - 16:58:10: ... 7%|▋ | 2/30 [00:00<00:00, 276.55 it/sec, obj=-.212]
INFO - 16:58:10:
INFO - 16:58:10: ... 10%|█ | 3/30 [00:00<00:00, 248.60 it/sec, obj=-.285]
INFO - 16:58:10:
INFO - 16:58:10: ... 13%|█▎ | 4/30 [00:00<00:00, 231.29 it/sec, obj=-.285]
INFO - 16:58:10:
INFO - 16:58:10: ... 17%|█▋ | 5/30 [00:00<00:00, 217.53 it/sec, obj=-.285]
INFO - 16:58:10:
INFO - 16:58:10: ... 20%|██ | 6/30 [00:00<00:00, 211.56 it/sec, obj=-.285]
INFO - 16:58:10:
INFO - 16:58:10: ... 23%|██▎ | 7/30 [00:00<00:00, 208.54 it/sec, obj=-.285]
INFO - 16:58:10:
INFO - 16:58:10: ... 27%|██▋ | 8/30 [00:00<00:00, 205.20 it/sec, obj=-.286]
INFO - 16:58:10:
INFO - 16:58:10: ... 30%|███ | 9/30 [00:00<00:00, 203.33 it/sec, obj=-.286]
INFO - 16:58:10:
INFO - 16:58:10: ... 33%|███▎ | 10/30 [00:00<00:00, 202.01 it/sec, obj=-.286]
INFO - 16:58:10:
INFO - 16:58:10:
INFO - 16:58:10: Optimization result:
INFO - 16:58:10: Optimizer info:
INFO - 16:58:10: Status: None
INFO - 16:58:10: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:58:10: Number of calls to the objective function by the optimizer: 11
INFO - 16:58:10: Solution:
INFO - 16:58:10: The solution is feasible.
INFO - 16:58:10: Objective: -0.2861511006159976
INFO - 16:58:10: Standardized constraints:
INFO - 16:58:10: g_1 = [-0.02505357 -0.02542063 -0.03358482 -0.04103714 -0.04706944 -0.20645898
INFO - 16:58:10: -0.03354102]
INFO - 16:58:10: Design space:
INFO - 16:58:10: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:10: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:10: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:10: | x_1[0] | 0.1 | 0.3999999999999848 | 0.4 | float |
INFO - 16:58:10: | x_1[1] | 0.75 | 0.7500000000000006 | 1.25 | float |
INFO - 16:58:10: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:10: *** End StructureScenario execution (time: 0:00:00.054015) ***
INFO - 16:58:10: ... 4%|▍ | 2/50 [00:00<00:12, 4.00 it/sec, obj=-574]
INFO - 16:58:10:
INFO - 16:58:10: *** Start PropulsionScenario execution ***
INFO - 16:58:10: PropulsionScenario
INFO - 16:58:10: Disciplines: SobieskiPropulsion
INFO - 16:58:10: MDO formulation: DisciplinaryOpt
INFO - 16:58:10: Optimization problem:
INFO - 16:58:10: minimize y_34(x_3)
INFO - 16:58:10: with respect to x_3
INFO - 16:58:10: subject to constraints:
INFO - 16:58:10: g_3(x_3) <= 0.0
INFO - 16:58:10: over the design space:
INFO - 16:58:10: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:10: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:10: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:10: | x_3 | 0.1 | 0.4302702621790957 | 1 | float |
INFO - 16:58:10: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:10: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:10: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:10:
INFO - 16:58:10: ... 3%|▎ | 1/30 [00:00<00:00, 1980.31 it/sec, obj=1.1]
INFO - 16:58:10:
INFO - 16:58:10: ... 7%|▋ | 2/30 [00:00<00:00, 525.11 it/sec, obj=1.16]
INFO - 16:58:10:
INFO - 16:58:10: ... 10%|█ | 3/30 [00:00<00:00, 545.94 it/sec, obj=1.09]
INFO - 16:58:10:
INFO - 16:58:10: ... 13%|█▎ | 4/30 [00:00<00:00, 473.92 it/sec, obj=1.12]
INFO - 16:58:10:
INFO - 16:58:10: ... 17%|█▋ | 5/30 [00:00<00:00, 439.61 it/sec, obj=1.12]
INFO - 16:58:10:
INFO - 16:58:10: ... 20%|██ | 6/30 [00:00<00:00, 417.48 it/sec, obj=1.12]
INFO - 16:58:10:
INFO - 16:58:10:
INFO - 16:58:10: Optimization result:
INFO - 16:58:10: Optimizer info:
INFO - 16:58:10: Status: None
INFO - 16:58:10: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:58:10: Number of calls to the objective function by the optimizer: 8
INFO - 16:58:10: Solution:
INFO - 16:58:10: The solution is feasible.
INFO - 16:58:10: Objective: 1.1169456193906955
INFO - 16:58:10: Standardized constraints:
INFO - 16:58:10: g_3 = [-7.20996205e-01 -2.79003795e-01 -2.22044605e-16 -1.27460556e-01]
INFO - 16:58:10: Design space:
INFO - 16:58:10: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:10: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:10: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:10: | x_3 | 0.1 | 0.2871004772038966 | 1 | float |
INFO - 16:58:10: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:10: *** End PropulsionScenario execution (time: 0:00:00.018176) ***
INFO - 16:58:10:
INFO - 16:58:10: *** Start AerodynamicsScenario execution ***
INFO - 16:58:10: AerodynamicsScenario
INFO - 16:58:10: Disciplines: SobieskiAerodynamics
INFO - 16:58:10: MDO formulation: DisciplinaryOpt
INFO - 16:58:10: Optimization problem:
INFO - 16:58:10: minimize -y_24(x_2) = -y_24(x_2)
INFO - 16:58:10: with respect to x_2
INFO - 16:58:10: subject to constraints:
INFO - 16:58:10: g_2(x_2) <= 0.0
INFO - 16:58:10: over the design space:
INFO - 16:58:10: +------+-------------+-------+-------------+-------+
INFO - 16:58:10: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:10: +------+-------------+-------+-------------+-------+
INFO - 16:58:10: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:10: +------+-------------+-------+-------------+-------+
INFO - 16:58:10: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:10: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:10:
INFO - 16:58:10: ... 3%|▎ | 1/30 [00:00<00:00, 1061.85 it/sec, obj=-3.32]
INFO - 16:58:10:
WARNING - 16:58:10: Optimization found no feasible point ! The least infeasible point is selected.
INFO - 16:58:10:
INFO - 16:58:10: Optimization result:
INFO - 16:58:10: Optimizer info:
INFO - 16:58:10: Status: 8
INFO - 16:58:10: Message: Positive directional derivative for linesearch
INFO - 16:58:10: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:10: Solution:
WARNING - 16:58:10: The solution is not feasible.
INFO - 16:58:10: Objective: -3.3171632100551673
INFO - 16:58:10: Standardized constraints:
INFO - 16:58:10: g_2 = 0.010000000000000009
INFO - 16:58:10: Design space:
INFO - 16:58:10: +------+-------------+-------+-------------+-------+
INFO - 16:58:10: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:10: +------+-------------+-------+-------------+-------+
INFO - 16:58:10: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:10: +------+-------------+-------+-------------+-------+
INFO - 16:58:10: *** End AerodynamicsScenario execution (time: 0:00:00.011795) ***
INFO - 16:58:10:
INFO - 16:58:10: *** Start StructureScenario execution ***
INFO - 16:58:10: StructureScenario
INFO - 16:58:10: Disciplines: SobieskiStructure
INFO - 16:58:10: MDO formulation: DisciplinaryOpt
INFO - 16:58:10: Optimization problem:
INFO - 16:58:10: minimize -y_11(x_1) = -y_11(x_1)
INFO - 16:58:10: with respect to x_1
INFO - 16:58:10: subject to constraints:
INFO - 16:58:10: g_1(x_1) <= 0.0
INFO - 16:58:10: over the design space:
INFO - 16:58:10: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:10: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:10: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:10: | x_1[0] | 0.1 | 0.3999999999999848 | 0.4 | float |
INFO - 16:58:10: | x_1[1] | 0.75 | 0.7500000000000006 | 1.25 | float |
INFO - 16:58:10: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:10: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:10: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:10:
INFO - 16:58:10: ... 3%|▎ | 1/30 [00:00<00:00, 631.39 it/sec, obj=-.272]
INFO - 16:58:10:
INFO - 16:58:10: ... 7%|▋ | 2/30 [00:00<00:00, 276.40 it/sec, obj=-.272]
INFO - 16:58:10:
INFO - 16:58:10:
INFO - 16:58:10: Optimization result:
INFO - 16:58:10: Optimizer info:
INFO - 16:58:10: Status: 8
INFO - 16:58:10: Message: Positive directional derivative for linesearch
INFO - 16:58:10: Number of calls to the objective function by the optimizer: 3
INFO - 16:58:10: Solution:
INFO - 16:58:10: The solution is feasible.
INFO - 16:58:10: Objective: -0.2721681413246109
INFO - 16:58:10: Standardized constraints:
INFO - 16:58:10: g_1 = [-0.02505357 -0.02542063 -0.03358482 -0.04103714 -0.04706944 -0.20645898
INFO - 16:58:10: -0.03354102]
INFO - 16:58:10: Design space:
INFO - 16:58:10: +--------+-------------+-------+-------------+-------+
INFO - 16:58:10: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:10: +--------+-------------+-------+-------------+-------+
INFO - 16:58:10: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:58:10: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:10: +--------+-------------+-------+-------------+-------+
INFO - 16:58:10: *** End StructureScenario execution (time: 0:00:00.014560) ***
INFO - 16:58:10: ... 6%|▌ | 3/50 [00:00<00:10, 4.34 it/sec, obj=-813]
INFO - 16:58:11:
INFO - 16:58:11: *** Start PropulsionScenario execution ***
INFO - 16:58:11: PropulsionScenario
INFO - 16:58:11: Disciplines: SobieskiPropulsion
INFO - 16:58:11: MDO formulation: DisciplinaryOpt
INFO - 16:58:11: Optimization problem:
INFO - 16:58:11: minimize y_34(x_3)
INFO - 16:58:11: with respect to x_3
INFO - 16:58:11: subject to constraints:
INFO - 16:58:11: g_3(x_3) <= 0.0
INFO - 16:58:11: over the design space:
INFO - 16:58:11: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:11: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:11: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:11: | x_3 | 0.1 | 0.2871004772038966 | 1 | float |
INFO - 16:58:11: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:11: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:11: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:11:
INFO - 16:58:11: ... 3%|▎ | 1/30 [00:00<00:00, 1188.52 it/sec, obj=1.16]
INFO - 16:58:11:
INFO - 16:58:11: ... 7%|▋ | 2/30 [00:00<00:00, 487.82 it/sec, obj=1.14]
INFO - 16:58:11:
INFO - 16:58:11: ... 10%|█ | 3/30 [00:00<00:00, 454.52 it/sec, obj=1.14]
INFO - 16:58:11:
INFO - 16:58:11: ... 13%|█▎ | 4/30 [00:00<00:00, 473.37 it/sec, obj=1.14]
INFO - 16:58:11:
INFO - 16:58:11:
INFO - 16:58:11: Optimization result:
INFO - 16:58:11: Optimizer info:
INFO - 16:58:11: Status: None
INFO - 16:58:11: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:58:11: Number of calls to the objective function by the optimizer: 5
INFO - 16:58:11: Solution:
INFO - 16:58:11: The solution is feasible.
INFO - 16:58:11: Objective: 1.137722098693054
INFO - 16:58:11: Standardized constraints:
INFO - 16:58:11: g_3 = [-7.10555843e-01 -2.89444157e-01 6.66133815e-16 -1.11370139e-01]
INFO - 16:58:11: Design space:
INFO - 16:58:11: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:11: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:11: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:11: | x_3 | 0.1 | 0.3243399096603405 | 1 | float |
INFO - 16:58:11: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:11: *** End PropulsionScenario execution (time: 0:00:00.012205) ***
INFO - 16:58:11:
INFO - 16:58:11: *** Start AerodynamicsScenario execution ***
INFO - 16:58:11: AerodynamicsScenario
INFO - 16:58:11: Disciplines: SobieskiAerodynamics
INFO - 16:58:11: MDO formulation: DisciplinaryOpt
INFO - 16:58:11: Optimization problem:
INFO - 16:58:11: minimize -y_24(x_2) = -y_24(x_2)
INFO - 16:58:11: with respect to x_2
INFO - 16:58:11: subject to constraints:
INFO - 16:58:11: g_2(x_2) <= 0.0
INFO - 16:58:11: over the design space:
INFO - 16:58:11: +------+-------------+-------+-------------+-------+
INFO - 16:58:11: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:11: +------+-------------+-------+-------------+-------+
INFO - 16:58:11: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:11: +------+-------------+-------+-------------+-------+
INFO - 16:58:11: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:11: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:11:
INFO - 16:58:11: ... 3%|▎ | 1/30 [00:00<00:00, 1168.33 it/sec, obj=-3.31]
INFO - 16:58:11:
WARNING - 16:58:11: Optimization found no feasible point ! The least infeasible point is selected.
INFO - 16:58:11:
INFO - 16:58:11: Optimization result:
INFO - 16:58:11: Optimizer info:
INFO - 16:58:11: Status: 8
INFO - 16:58:11: Message: Positive directional derivative for linesearch
INFO - 16:58:11: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:11: Solution:
WARNING - 16:58:11: The solution is not feasible.
INFO - 16:58:11: Objective: -3.3146292282019347
INFO - 16:58:11: Standardized constraints:
INFO - 16:58:11: g_2 = 0.010000000000000009
INFO - 16:58:11: Design space:
INFO - 16:58:11: +------+-------------+-------+-------------+-------+
INFO - 16:58:11: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:11: +------+-------------+-------+-------------+-------+
INFO - 16:58:11: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:11: +------+-------------+-------+-------------+-------+
INFO - 16:58:11: *** End AerodynamicsScenario execution (time: 0:00:00.006869) ***
INFO - 16:58:11:
INFO - 16:58:11: *** Start StructureScenario execution ***
INFO - 16:58:11: StructureScenario
INFO - 16:58:11: Disciplines: SobieskiStructure
INFO - 16:58:11: MDO formulation: DisciplinaryOpt
INFO - 16:58:11: Optimization problem:
INFO - 16:58:11: minimize -y_11(x_1) = -y_11(x_1)
INFO - 16:58:11: with respect to x_1
INFO - 16:58:11: subject to constraints:
INFO - 16:58:11: g_1(x_1) <= 0.0
INFO - 16:58:11: over the design space:
INFO - 16:58:11: +--------+-------------+-------+-------------+-------+
INFO - 16:58:11: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:11: +--------+-------------+-------+-------------+-------+
INFO - 16:58:11: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:58:11: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:11: +--------+-------------+-------+-------------+-------+
INFO - 16:58:11: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:11: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:11:
INFO - 16:58:11: ... 3%|▎ | 1/30 [00:00<00:00, 700.22 it/sec, obj=-.274]
INFO - 16:58:11:
INFO - 16:58:11:
INFO - 16:58:11: Optimization result:
INFO - 16:58:11: Optimizer info:
INFO - 16:58:11: Status: 8
INFO - 16:58:11: Message: Positive directional derivative for linesearch
INFO - 16:58:11: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:11: Solution:
INFO - 16:58:11: The solution is feasible.
INFO - 16:58:11: Objective: -0.2737879545502587
INFO - 16:58:11: Standardized constraints:
INFO - 16:58:11: g_1 = [-0.02505357 -0.02542063 -0.03358482 -0.04103714 -0.04706944 -0.20645898
INFO - 16:58:11: -0.03354102]
INFO - 16:58:11: Design space:
INFO - 16:58:11: +--------+-------------+-------+-------------+-------+
INFO - 16:58:11: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:11: +--------+-------------+-------+-------------+-------+
INFO - 16:58:11: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:58:11: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:11: +--------+-------------+-------+-------------+-------+
INFO - 16:58:11: *** End StructureScenario execution (time: 0:00:00.009489) ***
INFO - 16:58:11: ... 8%|▊ | 4/50 [00:00<00:10, 4.44 it/sec, obj=-751]
INFO - 16:58:11:
INFO - 16:58:11: *** Start PropulsionScenario execution ***
INFO - 16:58:11: PropulsionScenario
INFO - 16:58:11: Disciplines: SobieskiPropulsion
INFO - 16:58:11: MDO formulation: DisciplinaryOpt
INFO - 16:58:11: Optimization problem:
INFO - 16:58:11: minimize y_34(x_3)
INFO - 16:58:11: with respect to x_3
INFO - 16:58:11: subject to constraints:
INFO - 16:58:11: g_3(x_3) <= 0.0
INFO - 16:58:11: over the design space:
INFO - 16:58:11: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:11: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:11: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:11: | x_3 | 0.1 | 0.3243399096603405 | 1 | float |
INFO - 16:58:11: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:11: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:11: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:11:
INFO - 16:58:11: ... 3%|▎ | 1/30 [00:00<00:00, 1914.33 it/sec, obj=1.1]
INFO - 16:58:11:
INFO - 16:58:11: ... 7%|▋ | 2/30 [00:00<00:00, 529.68 it/sec, obj=1.12]
INFO - 16:58:11:
INFO - 16:58:11: ... 10%|█ | 3/30 [00:00<00:00, 573.20 it/sec, obj=1.1]
INFO - 16:58:11:
INFO - 16:58:11: ... 13%|█▎ | 4/30 [00:00<00:00, 477.43 it/sec, obj=1.12]
INFO - 16:58:11:
INFO - 16:58:11: ... 17%|█▋ | 5/30 [00:00<00:00, 440.48 it/sec, obj=1.12]
INFO - 16:58:11:
INFO - 16:58:11: ... 20%|██ | 6/30 [00:00<00:00, 359.45 it/sec, obj=1.12]
INFO - 16:58:11:
INFO - 16:58:11:
INFO - 16:58:11: Optimization result:
INFO - 16:58:11: Optimizer info:
INFO - 16:58:11: Status: None
INFO - 16:58:11: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:58:11: Number of calls to the objective function by the optimizer: 14
INFO - 16:58:11: Solution:
INFO - 16:58:11: The solution is feasible.
INFO - 16:58:11: Objective: 1.1169456193906955
INFO - 16:58:11: Standardized constraints:
INFO - 16:58:11: g_3 = [-7.20597051e-01 -2.79402949e-01 2.22044605e-16 -1.27460556e-01]
INFO - 16:58:11: Design space:
INFO - 16:58:11: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:11: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:11: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:11: | x_3 | 0.1 | 0.2871004772038968 | 1 | float |
INFO - 16:58:11: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:11: *** End PropulsionScenario execution (time: 0:00:00.020682) ***
INFO - 16:58:11:
INFO - 16:58:11: *** Start AerodynamicsScenario execution ***
INFO - 16:58:11: AerodynamicsScenario
INFO - 16:58:11: Disciplines: SobieskiAerodynamics
INFO - 16:58:11: MDO formulation: DisciplinaryOpt
INFO - 16:58:11: Optimization problem:
INFO - 16:58:11: minimize -y_24(x_2) = -y_24(x_2)
INFO - 16:58:11: with respect to x_2
INFO - 16:58:11: subject to constraints:
INFO - 16:58:11: g_2(x_2) <= 0.0
INFO - 16:58:11: over the design space:
INFO - 16:58:11: +------+-------------+-------+-------------+-------+
INFO - 16:58:11: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:11: +------+-------------+-------+-------------+-------+
INFO - 16:58:11: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:11: +------+-------------+-------+-------------+-------+
INFO - 16:58:11: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:11: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:11:
INFO - 16:58:11: ... 3%|▎ | 1/30 [00:00<00:00, 1161.21 it/sec, obj=-3.38]
INFO - 16:58:11:
INFO - 16:58:11: ... 7%|▋ | 2/30 [00:00<00:00, 402.16 it/sec, obj=-3.38]
INFO - 16:58:11:
INFO - 16:58:11: ... 10%|█ | 3/30 [00:00<00:00, 461.89 it/sec, obj=-3.38]
INFO - 16:58:11:
INFO - 16:58:11: ... 13%|█▎ | 4/30 [00:00<00:00, 490.94 it/sec, obj=-3.38]
INFO - 16:58:11:
INFO - 16:58:11: ... 17%|█▋ | 5/30 [00:00<00:00, 517.88 it/sec, obj=-3.38]
INFO - 16:58:11:
INFO - 16:58:11: ... 20%|██ | 6/30 [00:00<00:00, 525.94 it/sec, obj=-3.38]
INFO - 16:58:11:
INFO - 16:58:11: ... 23%|██▎ | 7/30 [00:00<00:00, 541.76 it/sec, obj=-3.38]
INFO - 16:58:11:
INFO - 16:58:11: ... 27%|██▋ | 8/30 [00:00<00:00, 541.98 it/sec, obj=-3.38]
INFO - 16:58:11:
INFO - 16:58:11: ... 30%|███ | 9/30 [00:00<00:00, 549.98 it/sec, obj=-3.38]
INFO - 16:58:11:
INFO - 16:58:11: ... 33%|███▎ | 10/30 [00:00<00:00, 559.45 it/sec, obj=-3.38]
INFO - 16:58:11:
INFO - 16:58:11: ... 37%|███▋ | 11/30 [00:00<00:00, 441.78 it/sec, obj=-3.38]
INFO - 16:58:11:
INFO - 16:58:11: ... 40%|████ | 12/30 [00:00<00:00, 421.78 it/sec, obj=-3.38]
INFO - 16:58:11:
INFO - 16:58:11: ... 43%|████▎ | 13/30 [00:00<00:00, 432.69 it/sec, obj=-3.38]
INFO - 16:58:11:
INFO - 16:58:11: ... 47%|████▋ | 14/30 [00:00<00:00, 438.59 it/sec, obj=-3.38]
INFO - 16:58:11:
INFO - 16:58:11: ... 50%|█████ | 15/30 [00:00<00:00, 448.60 it/sec, obj=-3.38]
INFO - 16:58:11:
INFO - 16:58:11: ... 53%|█████▎ | 16/30 [00:00<00:00, 454.80 it/sec, obj=-3.38]
INFO - 16:58:11:
INFO - 16:58:11: ... 57%|█████▋ | 17/30 [00:00<00:00, 463.37 it/sec, obj=-3.38]
INFO - 16:58:11:
INFO - 16:58:11: ... 60%|██████ | 18/30 [00:00<00:00, 470.13 it/sec, obj=-3.38]
INFO - 16:58:11:
INFO - 16:58:11: ... 63%|██████▎ | 19/30 [00:00<00:00, 475.53 it/sec, obj=-3.38]
INFO - 16:58:11:
INFO - 16:58:11: ... 67%|██████▋ | 20/30 [00:00<00:00, 482.33 it/sec, obj=-3.38]
INFO - 16:58:11:
INFO - 16:58:11: ... 70%|███████ | 21/30 [00:00<00:00, 486.03 it/sec, obj=-3.38]
INFO - 16:58:11:
INFO - 16:58:11: ... 73%|███████▎ | 22/30 [00:00<00:00, 491.90 it/sec, obj=-3.38]
INFO - 16:58:11:
INFO - 16:58:11: ... 77%|███████▋ | 23/30 [00:00<00:00, 481.64 it/sec, obj=-3.38]
INFO - 16:58:11:
INFO - 16:58:11: ... 80%|████████ | 24/30 [00:00<00:00, 487.13 it/sec, obj=-3.38]
INFO - 16:58:11:
INFO - 16:58:11: ... 83%|████████▎ | 25/30 [00:00<00:00, 490.56 it/sec, obj=-3.38]
INFO - 16:58:11:
INFO - 16:58:11: ... 87%|████████▋ | 26/30 [00:00<00:00, 495.02 it/sec, obj=-3.38]
INFO - 16:58:11:
INFO - 16:58:11: ... 90%|█████████ | 27/30 [00:00<00:00, 499.26 it/sec, obj=-3.38]
INFO - 16:58:11:
INFO - 16:58:11: ... 93%|█████████▎| 28/30 [00:00<00:00, 500.79 it/sec, obj=-3.38]
INFO - 16:58:11:
INFO - 16:58:11: ... 97%|█████████▋| 29/30 [00:00<00:00, 505.11 it/sec, obj=-3.38]
INFO - 16:58:11:
INFO - 16:58:11: ... 100%|██████████| 30/30 [00:00<00:00, 502.14 it/sec, obj=-3.38]
INFO - 16:58:11:
WARNING - 16:58:11: Optimization found no feasible point ! The least infeasible point is selected.
INFO - 16:58:11:
INFO - 16:58:11: Optimization result:
INFO - 16:58:11: Optimizer info:
INFO - 16:58:11: Status: None
INFO - 16:58:11: Message: Maximum number of iterations reached. GEMSEO Stopped the driver
INFO - 16:58:11: Number of calls to the objective function by the optimizer: 81
INFO - 16:58:11: Solution:
WARNING - 16:58:11: The solution is not feasible.
INFO - 16:58:11: Objective: -3.3833585466979232
INFO - 16:58:11: Standardized constraints:
INFO - 16:58:11: g_2 = 0.010000000000000009
INFO - 16:58:11: Design space:
INFO - 16:58:11: +------+-------------+-------+-------------+-------+
INFO - 16:58:11: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:11: +------+-------------+-------+-------------+-------+
INFO - 16:58:11: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:11: +------+-------------+-------+-------------+-------+
INFO - 16:58:11: *** End AerodynamicsScenario execution (time: 0:00:00.064415) ***
INFO - 16:58:11:
INFO - 16:58:11: *** Start StructureScenario execution ***
INFO - 16:58:11: StructureScenario
INFO - 16:58:11: Disciplines: SobieskiStructure
INFO - 16:58:11: MDO formulation: DisciplinaryOpt
INFO - 16:58:11: Optimization problem:
INFO - 16:58:11: minimize -y_11(x_1) = -y_11(x_1)
INFO - 16:58:11: with respect to x_1
INFO - 16:58:11: subject to constraints:
INFO - 16:58:11: g_1(x_1) <= 0.0
INFO - 16:58:11: over the design space:
INFO - 16:58:11: +--------+-------------+-------+-------------+-------+
INFO - 16:58:11: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:11: +--------+-------------+-------+-------------+-------+
INFO - 16:58:11: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:58:11: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:11: +--------+-------------+-------+-------------+-------+
INFO - 16:58:11: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:11: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:11:
INFO - 16:58:11: ... 3%|▎ | 1/30 [00:00<00:00, 695.34 it/sec, obj=-.256]
INFO - 16:58:11:
INFO - 16:58:11: ... 7%|▋ | 2/30 [00:00<00:00, 279.54 it/sec, obj=-.233]
INFO - 16:58:11:
INFO - 16:58:11: ... 10%|█ | 3/30 [00:00<00:00, 248.01 it/sec, obj=-.237]
INFO - 16:58:11:
INFO - 16:58:11: ... 13%|█▎ | 4/30 [00:00<00:00, 229.99 it/sec, obj=-.255]
INFO - 16:58:11:
INFO - 16:58:11: ... 17%|█▋ | 5/30 [00:00<00:00, 220.00 it/sec, obj=-.255]
INFO - 16:58:11:
INFO - 16:58:11: ... 20%|██ | 6/30 [00:00<00:00, 213.24 it/sec, obj=-.255]
INFO - 16:58:11:
INFO - 16:58:11: ... 23%|██▎ | 7/30 [00:00<00:00, 209.90 it/sec, obj=-.255]
INFO - 16:58:11:
INFO - 16:58:11: ... 27%|██▋ | 8/30 [00:00<00:00, 207.00 it/sec, obj=-.255]
INFO - 16:58:11:
INFO - 16:58:11:
INFO - 16:58:11: Optimization result:
INFO - 16:58:11: Optimizer info:
INFO - 16:58:11: Status: None
INFO - 16:58:11: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:58:11: Number of calls to the objective function by the optimizer: 9
INFO - 16:58:11: Solution:
INFO - 16:58:11: The solution is feasible.
INFO - 16:58:11: Objective: -0.2554104389062356
INFO - 16:58:11: Standardized constraints:
INFO - 16:58:11: g_1 = [-2.87847242e-02 -1.88000814e-02 -2.52039105e-02 -3.26929762e-02
INFO - 16:58:11: -3.92051733e-02 -2.40000000e-01 -8.00592925e-12]
INFO - 16:58:11: Design space:
INFO - 16:58:11: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:11: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:11: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:11: | x_1[0] | 0.1 | 0.2842628772739981 | 0.4 | float |
INFO - 16:58:11: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:11: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:11: *** End StructureScenario execution (time: 0:00:00.043272) ***
INFO - 16:58:11: ... 10%|█ | 5/50 [00:01<00:10, 4.21 it/sec, obj=-734]
INFO - 16:58:11:
INFO - 16:58:11: *** Start PropulsionScenario execution ***
INFO - 16:58:11: PropulsionScenario
INFO - 16:58:11: Disciplines: SobieskiPropulsion
INFO - 16:58:11: MDO formulation: DisciplinaryOpt
INFO - 16:58:11: Optimization problem:
INFO - 16:58:11: minimize y_34(x_3)
INFO - 16:58:11: with respect to x_3
INFO - 16:58:11: subject to constraints:
INFO - 16:58:11: g_3(x_3) <= 0.0
INFO - 16:58:11: over the design space:
INFO - 16:58:11: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:11: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:11: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:11: | x_3 | 0.1 | 0.2871004772038968 | 1 | float |
INFO - 16:58:11: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:11: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:11: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:11:
INFO - 16:58:11: ... 3%|▎ | 1/30 [00:00<00:00, 2231.01 it/sec, obj=1.12]
INFO - 16:58:11:
INFO - 16:58:11:
INFO - 16:58:11: Optimization result:
INFO - 16:58:11: Optimizer info:
INFO - 16:58:11: Status: 8
INFO - 16:58:11: Message: Positive directional derivative for linesearch
INFO - 16:58:11: Number of calls to the objective function by the optimizer: 17
INFO - 16:58:11: Solution:
INFO - 16:58:11: The solution is feasible.
INFO - 16:58:11: Objective: 1.1169456193906955
INFO - 16:58:11: Standardized constraints:
INFO - 16:58:11: g_3 = [-8.42352689e-01 -1.57647311e-01 2.22044605e-16 -1.27460556e-01]
INFO - 16:58:11: Design space:
INFO - 16:58:11: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:11: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:11: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:11: | x_3 | 0.1 | 0.2871004772038968 | 1 | float |
INFO - 16:58:11: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:11: *** End PropulsionScenario execution (time: 0:00:00.012263) ***
INFO - 16:58:11:
INFO - 16:58:11: *** Start AerodynamicsScenario execution ***
INFO - 16:58:11: AerodynamicsScenario
INFO - 16:58:11: Disciplines: SobieskiAerodynamics
INFO - 16:58:11: MDO formulation: DisciplinaryOpt
INFO - 16:58:11: Optimization problem:
INFO - 16:58:11: minimize -y_24(x_2) = -y_24(x_2)
INFO - 16:58:11: with respect to x_2
INFO - 16:58:11: subject to constraints:
INFO - 16:58:11: g_2(x_2) <= 0.0
INFO - 16:58:11: over the design space:
INFO - 16:58:11: +------+-------------+-------+-------------+-------+
INFO - 16:58:11: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:11: +------+-------------+-------+-------------+-------+
INFO - 16:58:11: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:11: +------+-------------+-------+-------------+-------+
INFO - 16:58:11: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:11: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:11:
INFO - 16:58:11: ... 3%|▎ | 1/30 [00:00<00:00, 2139.95 it/sec, obj=-4.01]
INFO - 16:58:11:
WARNING - 16:58:11: Optimization found no feasible point ! The least infeasible point is selected.
INFO - 16:58:11:
INFO - 16:58:11: Optimization result:
INFO - 16:58:11: Optimizer info:
INFO - 16:58:11: Status: 8
INFO - 16:58:11: Message: Positive directional derivative for linesearch
INFO - 16:58:11: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:11: Solution:
WARNING - 16:58:11: The solution is not feasible.
INFO - 16:58:11: Objective: -4.0107635492314175
INFO - 16:58:11: Standardized constraints:
INFO - 16:58:11: g_2 = 0.010000000000000009
INFO - 16:58:11: Design space:
INFO - 16:58:11: +------+-------------+-------+-------------+-------+
INFO - 16:58:11: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:11: +------+-------------+-------+-------------+-------+
INFO - 16:58:11: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:11: +------+-------------+-------+-------------+-------+
INFO - 16:58:11: *** End AerodynamicsScenario execution (time: 0:00:00.006388) ***
INFO - 16:58:11:
INFO - 16:58:11: *** Start StructureScenario execution ***
INFO - 16:58:11: StructureScenario
INFO - 16:58:11: Disciplines: SobieskiStructure
INFO - 16:58:11: MDO formulation: DisciplinaryOpt
INFO - 16:58:11: Optimization problem:
INFO - 16:58:11: minimize -y_11(x_1) = -y_11(x_1)
INFO - 16:58:11: with respect to x_1
INFO - 16:58:11: subject to constraints:
INFO - 16:58:11: g_1(x_1) <= 0.0
INFO - 16:58:11: over the design space:
INFO - 16:58:11: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:11: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:11: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:11: | x_1[0] | 0.1 | 0.2842628772739981 | 0.4 | float |
INFO - 16:58:11: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:11: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:11: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:11: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:11:
INFO - 16:58:11: ... 3%|▎ | 1/30 [00:00<00:00, 1822.82 it/sec, obj=-.297]
INFO - 16:58:11:
INFO - 16:58:11: ... 7%|▋ | 2/30 [00:00<00:00, 314.06 it/sec, obj=-.297]
INFO - 16:58:11:
INFO - 16:58:11: ... 10%|█ | 3/30 [00:00<00:00, 266.74 it/sec, obj=-.297]
INFO - 16:58:11:
INFO - 16:58:11: ... 13%|█▎ | 4/30 [00:00<00:00, 241.79 it/sec, obj=-.297]
INFO - 16:58:11:
INFO - 16:58:11: ... 17%|█▋ | 5/30 [00:00<00:00, 227.37 it/sec, obj=-.297]
INFO - 16:58:11:
INFO - 16:58:11: ... 20%|██ | 6/30 [00:00<00:00, 220.41 it/sec, obj=-.297]
INFO - 16:58:11:
INFO - 16:58:11: ... 23%|██▎ | 7/30 [00:00<00:00, 215.42 it/sec, obj=-.297]
INFO - 16:58:11:
INFO - 16:58:11: ... 27%|██▋ | 8/30 [00:00<00:00, 227.63 it/sec, obj=-.297]
INFO - 16:58:11:
INFO - 16:58:11:
INFO - 16:58:11: Optimization result:
INFO - 16:58:11: Optimizer info:
INFO - 16:58:11: Status: None
INFO - 16:58:11: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:58:11: Number of calls to the objective function by the optimizer: 9
INFO - 16:58:11: Solution:
INFO - 16:58:11: The solution is feasible.
INFO - 16:58:11: Objective: -0.29713711523465847
INFO - 16:58:11: Standardized constraints:
INFO - 16:58:11: g_1 = [-0.02505357 -0.02542063 -0.03358482 -0.04103714 -0.04706944 -0.20645898
INFO - 16:58:11: -0.03354102]
INFO - 16:58:11: Design space:
INFO - 16:58:11: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:11: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:11: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:11: | x_1[0] | 0.1 | 0.3999999999999998 | 0.4 | float |
INFO - 16:58:11: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:11: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:11: *** End StructureScenario execution (time: 0:00:00.039463) ***
INFO - 16:58:11: ... 12%|█▏ | 6/50 [00:01<00:10, 4.39 it/sec, obj=-977]
INFO - 16:58:11:
INFO - 16:58:11: *** Start PropulsionScenario execution ***
INFO - 16:58:11: PropulsionScenario
INFO - 16:58:11: Disciplines: SobieskiPropulsion
INFO - 16:58:11: MDO formulation: DisciplinaryOpt
INFO - 16:58:11: Optimization problem:
INFO - 16:58:11: minimize y_34(x_3)
INFO - 16:58:11: with respect to x_3
INFO - 16:58:11: subject to constraints:
INFO - 16:58:11: g_3(x_3) <= 0.0
INFO - 16:58:11: over the design space:
INFO - 16:58:11: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:11: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:11: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:11: | x_3 | 0.1 | 0.2871004772038968 | 1 | float |
INFO - 16:58:11: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:11: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:11: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:11:
INFO - 16:58:11: ... 3%|▎ | 1/30 [00:00<00:00, 2264.74 it/sec, obj=1.12]
INFO - 16:58:11:
INFO - 16:58:11:
INFO - 16:58:11: Optimization result:
INFO - 16:58:11: Optimizer info:
INFO - 16:58:11: Status: 8
INFO - 16:58:11: Message: Positive directional derivative for linesearch
INFO - 16:58:11: Number of calls to the objective function by the optimizer: 17
INFO - 16:58:11: Solution:
INFO - 16:58:11: The solution is feasible.
INFO - 16:58:11: Objective: 1.1169456193906955
INFO - 16:58:11: Standardized constraints:
INFO - 16:58:11: g_3 = [-6.70083434e-01 -3.29916566e-01 2.22044605e-16 -1.27460556e-01]
INFO - 16:58:11: Design space:
INFO - 16:58:11: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:11: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:11: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:11: | x_3 | 0.1 | 0.2871004772038968 | 1 | float |
INFO - 16:58:11: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:11: *** End PropulsionScenario execution (time: 0:00:00.012379) ***
INFO - 16:58:11:
INFO - 16:58:11: *** Start AerodynamicsScenario execution ***
INFO - 16:58:11: AerodynamicsScenario
INFO - 16:58:11: Disciplines: SobieskiAerodynamics
INFO - 16:58:11: MDO formulation: DisciplinaryOpt
INFO - 16:58:11: Optimization problem:
INFO - 16:58:11: minimize -y_24(x_2) = -y_24(x_2)
INFO - 16:58:11: with respect to x_2
INFO - 16:58:11: subject to constraints:
INFO - 16:58:11: g_2(x_2) <= 0.0
INFO - 16:58:11: over the design space:
INFO - 16:58:11: +------+-------------+-------+-------------+-------+
INFO - 16:58:11: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:11: +------+-------------+-------+-------------+-------+
INFO - 16:58:11: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:11: +------+-------------+-------+-------------+-------+
INFO - 16:58:11: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:11: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:11:
INFO - 16:58:11: ... 3%|▎ | 1/30 [00:00<00:00, 985.97 it/sec, obj=-3.5]
INFO - 16:58:11:
WARNING - 16:58:11: Optimization found no feasible point ! The least infeasible point is selected.
INFO - 16:58:11:
INFO - 16:58:11: Optimization result:
INFO - 16:58:11: Optimizer info:
INFO - 16:58:11: Status: 8
INFO - 16:58:11: Message: Positive directional derivative for linesearch
INFO - 16:58:11: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:11: Solution:
WARNING - 16:58:11: The solution is not feasible.
INFO - 16:58:11: Objective: -3.4989599823565998
INFO - 16:58:11: Standardized constraints:
INFO - 16:58:11: g_2 = 0.010000000000000009
INFO - 16:58:11: Design space:
INFO - 16:58:11: +------+-------------+-------+-------------+-------+
INFO - 16:58:11: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:11: +------+-------------+-------+-------------+-------+
INFO - 16:58:11: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:11: +------+-------------+-------+-------------+-------+
INFO - 16:58:11: *** End AerodynamicsScenario execution (time: 0:00:00.011886) ***
INFO - 16:58:11:
INFO - 16:58:11: *** Start StructureScenario execution ***
INFO - 16:58:11: StructureScenario
INFO - 16:58:11: Disciplines: SobieskiStructure
INFO - 16:58:11: MDO formulation: DisciplinaryOpt
INFO - 16:58:11: Optimization problem:
INFO - 16:58:11: minimize -y_11(x_1) = -y_11(x_1)
INFO - 16:58:11: with respect to x_1
INFO - 16:58:11: subject to constraints:
INFO - 16:58:11: g_1(x_1) <= 0.0
INFO - 16:58:11: over the design space:
INFO - 16:58:11: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:11: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:11: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:11: | x_1[0] | 0.1 | 0.3999999999999998 | 0.4 | float |
INFO - 16:58:11: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:11: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:11: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:11: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:11:
INFO - 16:58:11: ... 3%|▎ | 1/30 [00:00<00:00, 697.66 it/sec, obj=-.366]
INFO - 16:58:11:
INFO - 16:58:11: ... 7%|▋ | 2/30 [00:00<00:00, 236.34 it/sec, obj=-.342]
INFO - 16:58:11:
INFO - 16:58:11: ... 10%|█ | 3/30 [00:00<00:00, 185.82 it/sec, obj=-.365]
INFO - 16:58:11:
INFO - 16:58:11: ... 13%|█▎ | 4/30 [00:00<00:00, 173.90 it/sec, obj=-.365]
INFO - 16:58:11:
INFO - 16:58:11: ... 17%|█▋ | 5/30 [00:00<00:00, 177.26 it/sec, obj=-.365]
INFO - 16:58:11:
INFO - 16:58:11: ... 20%|██ | 6/30 [00:00<00:00, 178.59 it/sec, obj=-.365]
INFO - 16:58:11:
INFO - 16:58:11:
INFO - 16:58:11: Optimization result:
INFO - 16:58:11: Optimizer info:
INFO - 16:58:11: Status: None
INFO - 16:58:11: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:58:11: Number of calls to the objective function by the optimizer: 7
INFO - 16:58:11: Solution:
INFO - 16:58:11: The solution is feasible.
INFO - 16:58:11: Objective: -0.36496565666784275
INFO - 16:58:11: Standardized constraints:
INFO - 16:58:11: g_1 = [-2.58485524e-02 -1.74692489e-02 -2.44407670e-02 -3.21952521e-02
INFO - 16:58:11: -3.88530648e-02 -2.40000000e-01 -9.75219905e-13]
INFO - 16:58:11: Design space:
INFO - 16:58:11: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:11: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:11: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:11: | x_1[0] | 0.1 | 0.3050815823000741 | 0.4 | float |
INFO - 16:58:11: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:11: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:11: *** End StructureScenario execution (time: 0:00:00.038100) ***
INFO - 16:58:11: ... 14%|█▍ | 7/50 [00:01<00:10, 4.25 it/sec, obj=-1.05e+3]
INFO - 16:58:11:
INFO - 16:58:11: *** Start PropulsionScenario execution ***
INFO - 16:58:11: PropulsionScenario
INFO - 16:58:11: Disciplines: SobieskiPropulsion
INFO - 16:58:11: MDO formulation: DisciplinaryOpt
INFO - 16:58:11: Optimization problem:
INFO - 16:58:11: minimize y_34(x_3)
INFO - 16:58:11: with respect to x_3
INFO - 16:58:11: subject to constraints:
INFO - 16:58:11: g_3(x_3) <= 0.0
INFO - 16:58:11: over the design space:
INFO - 16:58:11: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:11: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:11: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:11: | x_3 | 0.1 | 0.2871004772038968 | 1 | float |
INFO - 16:58:11: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:11: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:12: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:12:
INFO - 16:58:12: ... 3%|▎ | 1/30 [00:00<00:00, 2235.77 it/sec, obj=1.04]
INFO - 16:58:12:
INFO - 16:58:12: ... 7%|▋ | 2/30 [00:00<00:00, 539.88 it/sec, obj=1.07]
INFO - 16:58:12:
INFO - 16:58:12: ... 10%|█ | 3/30 [00:00<00:00, 594.07 it/sec, obj=1.05]
INFO - 16:58:12:
INFO - 16:58:12: ... 13%|█▎ | 4/30 [00:00<00:00, 492.80 it/sec, obj=1.07]
INFO - 16:58:12:
INFO - 16:58:12: ... 17%|█▋ | 5/30 [00:00<00:00, 395.15 it/sec, obj=1.07]
INFO - 16:58:12:
INFO - 16:58:12: ... 20%|██ | 6/30 [00:00<00:00, 417.85 it/sec, obj=1.07]
INFO - 16:58:12:
INFO - 16:58:12:
INFO - 16:58:12: Optimization result:
INFO - 16:58:12: Optimizer info:
INFO - 16:58:12: Status: None
INFO - 16:58:12: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:58:12: Number of calls to the objective function by the optimizer: 8
INFO - 16:58:12: Solution:
INFO - 16:58:12: The solution is feasible.
INFO - 16:58:12: Objective: 1.0733793462031596
INFO - 16:58:12: Standardized constraints:
INFO - 16:58:12: g_3 = [-0.72171604 -0.27828396 0. -0.15721712]
INFO - 16:58:12: Design space:
INFO - 16:58:12: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:12: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:12: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:12: | x_3 | 0.1 | 0.2068477480804932 | 1 | float |
INFO - 16:58:12: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:12: *** End PropulsionScenario execution (time: 0:00:00.018389) ***
INFO - 16:58:12:
INFO - 16:58:12: *** Start AerodynamicsScenario execution ***
INFO - 16:58:12: AerodynamicsScenario
INFO - 16:58:12: Disciplines: SobieskiAerodynamics
INFO - 16:58:12: MDO formulation: DisciplinaryOpt
INFO - 16:58:12: Optimization problem:
INFO - 16:58:12: minimize -y_24(x_2) = -y_24(x_2)
INFO - 16:58:12: with respect to x_2
INFO - 16:58:12: subject to constraints:
INFO - 16:58:12: g_2(x_2) <= 0.0
INFO - 16:58:12: over the design space:
INFO - 16:58:12: +------+-------------+-------+-------------+-------+
INFO - 16:58:12: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:12: +------+-------------+-------+-------------+-------+
INFO - 16:58:12: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:12: +------+-------------+-------+-------------+-------+
INFO - 16:58:12: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:12: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:12:
INFO - 16:58:12: ... 3%|▎ | 1/30 [00:00<00:00, 1162.50 it/sec, obj=-4.65]
INFO - 16:58:12:
WARNING - 16:58:12: Optimization found no feasible point ! The least infeasible point is selected.
INFO - 16:58:12:
INFO - 16:58:12: Optimization result:
INFO - 16:58:12: Optimizer info:
INFO - 16:58:12: Status: 8
INFO - 16:58:12: Message: Positive directional derivative for linesearch
INFO - 16:58:12: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:12: Solution:
WARNING - 16:58:12: The solution is not feasible.
INFO - 16:58:12: Objective: -4.654696008207174
INFO - 16:58:12: Standardized constraints:
INFO - 16:58:12: g_2 = 0.010000000000000009
INFO - 16:58:12: Design space:
INFO - 16:58:12: +------+-------------+-------+-------------+-------+
INFO - 16:58:12: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:12: +------+-------------+-------+-------------+-------+
INFO - 16:58:12: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:12: +------+-------------+-------+-------------+-------+
INFO - 16:58:12: *** End AerodynamicsScenario execution (time: 0:00:00.006935) ***
INFO - 16:58:12:
INFO - 16:58:12: *** Start StructureScenario execution ***
INFO - 16:58:12: StructureScenario
INFO - 16:58:12: Disciplines: SobieskiStructure
INFO - 16:58:12: MDO formulation: DisciplinaryOpt
INFO - 16:58:12: Optimization problem:
INFO - 16:58:12: minimize -y_11(x_1) = -y_11(x_1)
INFO - 16:58:12: with respect to x_1
INFO - 16:58:12: subject to constraints:
INFO - 16:58:12: g_1(x_1) <= 0.0
INFO - 16:58:12: over the design space:
INFO - 16:58:12: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:12: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:12: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:12: | x_1[0] | 0.1 | 0.3050815823000741 | 0.4 | float |
INFO - 16:58:12: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:12: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:12: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:12: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:12:
INFO - 16:58:12: ... 3%|▎ | 1/30 [00:00<00:00, 693.27 it/sec, obj=-.394]
INFO - 16:58:12:
INFO - 16:58:12: ... 7%|▋ | 2/30 [00:00<00:00, 277.67 it/sec, obj=-.394]
INFO - 16:58:12:
INFO - 16:58:12: ... 10%|█ | 3/30 [00:00<00:00, 249.90 it/sec, obj=-.394]
INFO - 16:58:12:
INFO - 16:58:12: ... 13%|█▎ | 4/30 [00:00<00:00, 232.27 it/sec, obj=-.394]
INFO - 16:58:12:
INFO - 16:58:12: ... 17%|█▋ | 5/30 [00:00<00:00, 218.06 it/sec, obj=-.394]
INFO - 16:58:12:
INFO - 16:58:12: ... 20%|██ | 6/30 [00:00<00:00, 213.29 it/sec, obj=-.394]
INFO - 16:58:12:
INFO - 16:58:12: ... 23%|██▎ | 7/30 [00:00<00:00, 209.44 it/sec, obj=-.394]
INFO - 16:58:12:
INFO - 16:58:12: ... 27%|██▋ | 8/30 [00:00<00:00, 205.76 it/sec, obj=-.394]
INFO - 16:58:12:
INFO - 16:58:12:
INFO - 16:58:12: Optimization result:
INFO - 16:58:12: Optimizer info:
INFO - 16:58:12: Status: None
INFO - 16:58:12: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:58:12: Number of calls to the objective function by the optimizer: 9
INFO - 16:58:12: Solution:
INFO - 16:58:12: The solution is feasible.
INFO - 16:58:12: Objective: -0.39432348281310614
INFO - 16:58:12: Standardized constraints:
INFO - 16:58:12: g_1 = [-2.18016988e-02 -1.56468526e-02 -2.34022845e-02 -3.15220572e-02
INFO - 16:58:12: -3.83796197e-02 -2.40000000e-01 -5.55111512e-16]
INFO - 16:58:12: Design space:
INFO - 16:58:12: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:12: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:12: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:12: | x_1[0] | 0.1 | 0.3350305463282062 | 0.4 | float |
INFO - 16:58:12: | x_1[1] | 0.75 | 0.7500000000000001 | 1.25 | float |
INFO - 16:58:12: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:12: *** End StructureScenario execution (time: 0:00:00.043160) ***
INFO - 16:58:12: ... 16%|█▌ | 8/50 [00:01<00:09, 4.26 it/sec, obj=-1.67e+3]
INFO - 16:58:12:
INFO - 16:58:12: *** Start PropulsionScenario execution ***
INFO - 16:58:12: PropulsionScenario
INFO - 16:58:12: Disciplines: SobieskiPropulsion
INFO - 16:58:12: MDO formulation: DisciplinaryOpt
INFO - 16:58:12: Optimization problem:
INFO - 16:58:12: minimize y_34(x_3)
INFO - 16:58:12: with respect to x_3
INFO - 16:58:12: subject to constraints:
INFO - 16:58:12: g_3(x_3) <= 0.0
INFO - 16:58:12: over the design space:
INFO - 16:58:12: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:12: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:12: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:12: | x_3 | 0.1 | 0.2068477480804932 | 1 | float |
INFO - 16:58:12: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:12: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:12: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:12:
INFO - 16:58:12: ... 3%|▎ | 1/30 [00:00<00:00, 1379.71 it/sec, obj=1.03]
INFO - 16:58:12:
INFO - 16:58:12: ... 7%|▋ | 2/30 [00:00<00:00, 493.27 it/sec, obj=1.04]
INFO - 16:58:12:
INFO - 16:58:12: ... 10%|█ | 3/30 [00:00<00:00, 563.75 it/sec, obj=1.03]
INFO - 16:58:12:
INFO - 16:58:12: ... 13%|█▎ | 4/30 [00:00<00:00, 476.92 it/sec, obj=1.04]
INFO - 16:58:12:
INFO - 16:58:12: ... 17%|█▋ | 5/30 [00:00<00:00, 430.36 it/sec, obj=1.04]
INFO - 16:58:12:
INFO - 16:58:12: ... 20%|██ | 6/30 [00:00<00:00, 420.62 it/sec, obj=1.04]
INFO - 16:58:12:
INFO - 16:58:12:
INFO - 16:58:12: Optimization result:
INFO - 16:58:12: Optimizer info:
INFO - 16:58:12: Status: None
INFO - 16:58:12: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:58:12: Number of calls to the objective function by the optimizer: 10
INFO - 16:58:12: Solution:
INFO - 16:58:12: The solution is feasible.
INFO - 16:58:12: Objective: 1.0410444624498805
INFO - 16:58:12: Standardized constraints:
INFO - 16:58:12: g_3 = [-8.51430794e-01 -1.48569206e-01 2.22044605e-16 -1.59690326e-01]
INFO - 16:58:12: Design space:
INFO - 16:58:12: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:12: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:12: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:12: | x_3 | 0.1 | 0.1842648745222338 | 1 | float |
INFO - 16:58:12: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:12: *** End PropulsionScenario execution (time: 0:00:00.018264) ***
INFO - 16:58:12:
INFO - 16:58:12: *** Start AerodynamicsScenario execution ***
INFO - 16:58:12: AerodynamicsScenario
INFO - 16:58:12: Disciplines: SobieskiAerodynamics
INFO - 16:58:12: MDO formulation: DisciplinaryOpt
INFO - 16:58:12: Optimization problem:
INFO - 16:58:12: minimize -y_24(x_2) = -y_24(x_2)
INFO - 16:58:12: with respect to x_2
INFO - 16:58:12: subject to constraints:
INFO - 16:58:12: g_2(x_2) <= 0.0
INFO - 16:58:12: over the design space:
INFO - 16:58:12: +------+-------------+-------+-------------+-------+
INFO - 16:58:12: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:12: +------+-------------+-------+-------------+-------+
INFO - 16:58:12: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:12: +------+-------------+-------+-------------+-------+
INFO - 16:58:12: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:12: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:12:
INFO - 16:58:12: ... 3%|▎ | 1/30 [00:00<00:00, 1164.11 it/sec, obj=-5.69]
INFO - 16:58:12:
INFO - 16:58:12:
INFO - 16:58:12: Optimization result:
INFO - 16:58:12: Optimizer info:
INFO - 16:58:12: Status: 8
INFO - 16:58:12: Message: Positive directional derivative for linesearch
INFO - 16:58:12: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:12: Solution:
INFO - 16:58:12: The solution is feasible.
INFO - 16:58:12: Objective: -5.690042748703857
INFO - 16:58:12: Standardized constraints:
INFO - 16:58:12: g_2 = -0.040898733728932046
INFO - 16:58:12: Design space:
INFO - 16:58:12: +------+-------------+-------+-------------+-------+
INFO - 16:58:12: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:12: +------+-------------+-------+-------------+-------+
INFO - 16:58:12: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:12: +------+-------------+-------+-------------+-------+
INFO - 16:58:12: *** End AerodynamicsScenario execution (time: 0:00:00.006748) ***
INFO - 16:58:12:
INFO - 16:58:12: *** Start StructureScenario execution ***
INFO - 16:58:12: StructureScenario
INFO - 16:58:12: Disciplines: SobieskiStructure
INFO - 16:58:12: MDO formulation: DisciplinaryOpt
INFO - 16:58:12: Optimization problem:
INFO - 16:58:12: minimize -y_11(x_1) = -y_11(x_1)
INFO - 16:58:12: with respect to x_1
INFO - 16:58:12: subject to constraints:
INFO - 16:58:12: g_1(x_1) <= 0.0
INFO - 16:58:12: over the design space:
INFO - 16:58:12: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:12: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:12: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:12: | x_1[0] | 0.1 | 0.3350305463282062 | 0.4 | float |
INFO - 16:58:12: | x_1[1] | 0.75 | 0.7500000000000001 | 1.25 | float |
INFO - 16:58:12: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:12: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:12: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:12:
INFO - 16:58:12: ... 3%|▎ | 1/30 [00:00<00:00, 676.83 it/sec, obj=-.387]
INFO - 16:58:12:
INFO - 16:58:12: ... 7%|▋ | 2/30 [00:00<00:00, 276.65 it/sec, obj=-.129]
INFO - 16:58:12:
INFO - 16:58:12: ... 10%|█ | 3/30 [00:00<00:00, 249.15 it/sec, obj=-.163]
INFO - 16:58:12:
INFO - 16:58:12: ... 13%|█▎ | 4/30 [00:00<00:00, 234.18 it/sec, obj=-.171]
INFO - 16:58:12:
INFO - 16:58:12: ... 17%|█▋ | 5/30 [00:00<00:00, 222.01 it/sec, obj=-.172]
INFO - 16:58:12:
INFO - 16:58:12: ... 20%|██ | 6/30 [00:00<00:00, 215.71 it/sec, obj=-.172]
INFO - 16:58:12:
INFO - 16:58:12: ... 23%|██▎ | 7/30 [00:00<00:00, 211.99 it/sec, obj=-.175]
INFO - 16:58:12:
INFO - 16:58:12: ... 27%|██▋ | 8/30 [00:00<00:00, 208.47 it/sec, obj=-.177]
INFO - 16:58:12:
INFO - 16:58:12: ... 30%|███ | 9/30 [00:00<00:00, 206.07 it/sec, obj=-.177]
INFO - 16:58:12:
INFO - 16:58:12: ... 33%|███▎ | 10/30 [00:00<00:00, 204.54 it/sec, obj=-.177]
INFO - 16:58:12:
INFO - 16:58:12: ... 37%|███▋ | 11/30 [00:00<00:00, 213.24 it/sec, obj=-.177]
INFO - 16:58:12:
INFO - 16:58:12:
INFO - 16:58:12: Optimization result:
INFO - 16:58:12: Optimizer info:
INFO - 16:58:12: Status: None
INFO - 16:58:12: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:58:12: Number of calls to the objective function by the optimizer: 12
INFO - 16:58:12: Solution:
INFO - 16:58:12: The solution is feasible.
INFO - 16:58:12: Objective: -0.17693182970650312
INFO - 16:58:12: Standardized constraints:
INFO - 16:58:12: g_1 = [ 1.01382036e-09 -2.91294364e-02 -4.40206162e-02 -5.30597916e-02
INFO - 16:58:12: -5.91294367e-02 -7.67607717e-02 -1.63239228e-01]
INFO - 16:58:12: Design space:
INFO - 16:58:12: +--------+-------------+-------------------+-------------+-------+
INFO - 16:58:12: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:12: +--------+-------------+-------------------+-------------+-------+
INFO - 16:58:12: | x_1[0] | 0.1 | 0.1 | 0.4 | float |
INFO - 16:58:12: | x_1[1] | 0.75 | 1.045173780682283 | 1.25 | float |
INFO - 16:58:12: +--------+-------------+-------------------+-------------+-------+
INFO - 16:58:12: *** End StructureScenario execution (time: 0:00:00.055928) ***
INFO - 16:58:12: ... 18%|█▊ | 9/50 [00:02<00:09, 4.31 it/sec, obj=-1.73e+3]
INFO - 16:58:12:
INFO - 16:58:12: *** Start PropulsionScenario execution ***
INFO - 16:58:12: PropulsionScenario
INFO - 16:58:12: Disciplines: SobieskiPropulsion
INFO - 16:58:12: MDO formulation: DisciplinaryOpt
INFO - 16:58:12: Optimization problem:
INFO - 16:58:12: minimize y_34(x_3)
INFO - 16:58:12: with respect to x_3
INFO - 16:58:12: subject to constraints:
INFO - 16:58:12: g_3(x_3) <= 0.0
INFO - 16:58:12: over the design space:
INFO - 16:58:12: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:12: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:12: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:12: | x_3 | 0.1 | 0.1842648745222338 | 1 | float |
INFO - 16:58:12: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:12: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:12: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:12:
INFO - 16:58:12: ... 3%|▎ | 1/30 [00:00<00:00, 2023.30 it/sec, obj=1.01]
INFO - 16:58:12:
INFO - 16:58:12: ... 7%|▋ | 2/30 [00:00<00:00, 531.13 it/sec, obj=1.02]
INFO - 16:58:12:
INFO - 16:58:12: ... 10%|█ | 3/30 [00:00<00:00, 577.91 it/sec, obj=1.01]
INFO - 16:58:12:
INFO - 16:58:12: ... 13%|█▎ | 4/30 [00:00<00:00, 493.74 it/sec, obj=1.02]
INFO - 16:58:12:
INFO - 16:58:12: ... 17%|█▋ | 5/30 [00:00<00:00, 448.77 it/sec, obj=1.02]
INFO - 16:58:12:
INFO - 16:58:12: ... 20%|██ | 6/30 [00:00<00:00, 421.50 it/sec, obj=1.02]
INFO - 16:58:12:
INFO - 16:58:12:
INFO - 16:58:12: Optimization result:
INFO - 16:58:12: Optimizer info:
INFO - 16:58:12: Status: None
INFO - 16:58:12: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:58:12: Number of calls to the objective function by the optimizer: 7
INFO - 16:58:12: Solution:
INFO - 16:58:12: The solution is feasible.
INFO - 16:58:12: Objective: 1.016000144206172
INFO - 16:58:12: Standardized constraints:
INFO - 16:58:12: g_3 = [-7.31050536e-01 -2.68949464e-01 8.88178420e-16 -1.65753519e-01]
INFO - 16:58:12: Design space:
INFO - 16:58:12: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:12: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:12: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:12: | x_3 | 0.1 | 0.1765337509472553 | 1 | float |
INFO - 16:58:12: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:12: *** End PropulsionScenario execution (time: 0:00:00.017880) ***
INFO - 16:58:12:
INFO - 16:58:12: *** Start AerodynamicsScenario execution ***
INFO - 16:58:12: AerodynamicsScenario
INFO - 16:58:12: Disciplines: SobieskiAerodynamics
INFO - 16:58:12: MDO formulation: DisciplinaryOpt
INFO - 16:58:12: Optimization problem:
INFO - 16:58:12: minimize -y_24(x_2) = -y_24(x_2)
INFO - 16:58:12: with respect to x_2
INFO - 16:58:12: subject to constraints:
INFO - 16:58:12: g_2(x_2) <= 0.0
INFO - 16:58:12: over the design space:
INFO - 16:58:12: +------+-------------+-------+-------------+-------+
INFO - 16:58:12: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:12: +------+-------------+-------+-------------+-------+
INFO - 16:58:12: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:12: +------+-------------+-------+-------------+-------+
INFO - 16:58:12: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:12: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:12:
INFO - 16:58:12: ... 3%|▎ | 1/30 [00:00<00:00, 992.03 it/sec, obj=-13]
INFO - 16:58:12:
WARNING - 16:58:12: Optimization found no feasible point ! The least infeasible point is selected.
INFO - 16:58:12:
INFO - 16:58:12: Optimization result:
INFO - 16:58:12: Optimizer info:
INFO - 16:58:12: Status: 8
INFO - 16:58:12: Message: Positive directional derivative for linesearch
INFO - 16:58:12: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:12: Solution:
WARNING - 16:58:12: The solution is not feasible.
INFO - 16:58:12: Objective: -13.032585576713766
INFO - 16:58:12: Standardized constraints:
INFO - 16:58:12: g_2 = 0.006789165930262353
INFO - 16:58:12: Design space:
INFO - 16:58:12: +------+-------------+-------+-------------+-------+
INFO - 16:58:12: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:12: +------+-------------+-------+-------------+-------+
INFO - 16:58:12: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:12: +------+-------------+-------+-------------+-------+
INFO - 16:58:12: *** End AerodynamicsScenario execution (time: 0:00:00.006888) ***
INFO - 16:58:12:
INFO - 16:58:12: *** Start StructureScenario execution ***
INFO - 16:58:12: StructureScenario
INFO - 16:58:12: Disciplines: SobieskiStructure
INFO - 16:58:12: MDO formulation: DisciplinaryOpt
INFO - 16:58:12: Optimization problem:
INFO - 16:58:12: minimize -y_11(x_1) = -y_11(x_1)
INFO - 16:58:12: with respect to x_1
INFO - 16:58:12: subject to constraints:
INFO - 16:58:12: g_1(x_1) <= 0.0
INFO - 16:58:12: over the design space:
INFO - 16:58:12: +--------+-------------+-------------------+-------------+-------+
INFO - 16:58:12: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:12: +--------+-------------+-------------------+-------------+-------+
INFO - 16:58:12: | x_1[0] | 0.1 | 0.1 | 0.4 | float |
INFO - 16:58:12: | x_1[1] | 0.75 | 1.045173780682283 | 1.25 | float |
INFO - 16:58:12: +--------+-------------+-------------------+-------------+-------+
INFO - 16:58:12: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:12: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:12:
INFO - 16:58:12: ... 3%|▎ | 1/30 [00:00<00:00, 669.48 it/sec, obj=-.199]
INFO - 16:58:12:
INFO - 16:58:12: ... 7%|▋ | 2/30 [00:00<00:00, 284.65 it/sec, obj=-.265]
INFO - 16:58:12:
INFO - 16:58:12: ... 10%|█ | 3/30 [00:00<00:00, 247.80 it/sec, obj=-.596]
INFO - 16:58:12:
INFO - 16:58:12: ... 13%|█▎ | 4/30 [00:00<00:00, 230.27 it/sec, obj=-.596]
INFO - 16:58:12:
INFO - 16:58:12: ... 17%|█▋ | 5/30 [00:00<00:00, 221.13 it/sec, obj=-.596]
INFO - 16:58:12:
INFO - 16:58:12: ... 20%|██ | 6/30 [00:00<00:00, 214.54 it/sec, obj=-.599]
INFO - 16:58:12:
INFO - 16:58:12: ... 23%|██▎ | 7/30 [00:00<00:00, 210.64 it/sec, obj=-.604]
INFO - 16:58:12:
INFO - 16:58:12: ... 27%|██▋ | 8/30 [00:00<00:00, 208.17 it/sec, obj=-.605]
INFO - 16:58:12:
INFO - 16:58:12: ... 30%|███ | 9/30 [00:00<00:00, 204.53 it/sec, obj=-.605]
INFO - 16:58:12:
INFO - 16:58:12: ... 33%|███▎ | 10/30 [00:00<00:00, 202.89 it/sec, obj=-.605]
INFO - 16:58:12:
INFO - 16:58:12: ... 37%|███▋ | 11/30 [00:00<00:00, 200.15 it/sec, obj=-.605]
INFO - 16:58:12:
INFO - 16:58:12:
INFO - 16:58:12: Optimization result:
INFO - 16:58:12: Optimizer info:
INFO - 16:58:12: Status: None
INFO - 16:58:12: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:58:12: Number of calls to the objective function by the optimizer: 12
INFO - 16:58:12: Solution:
INFO - 16:58:12: The solution is feasible.
INFO - 16:58:12: Objective: -0.6049250919946817
INFO - 16:58:12: Standardized constraints:
INFO - 16:58:12: g_1 = [-7.84308818e-09 -7.11387989e-03 -1.92531129e-02 -2.92829878e-02
INFO - 16:58:12: -3.71138773e-02 -2.24260788e-01 -1.57392122e-02]
INFO - 16:58:12: Design space:
INFO - 16:58:12: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:12: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:12: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:12: | x_1[0] | 0.1 | 0.3956699005421056 | 0.4 | float |
INFO - 16:58:12: | x_1[1] | 0.75 | 0.7500000000392685 | 1.25 | float |
INFO - 16:58:12: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:12: *** End StructureScenario execution (time: 0:00:00.059478) ***
INFO - 16:58:12: ... 20%|██ | 10/50 [00:02<00:09, 4.28 it/sec, obj=-2.59e+3]
INFO - 16:58:12:
INFO - 16:58:12: *** Start PropulsionScenario execution ***
INFO - 16:58:12: PropulsionScenario
INFO - 16:58:12: Disciplines: SobieskiPropulsion
INFO - 16:58:12: MDO formulation: DisciplinaryOpt
INFO - 16:58:12: Optimization problem:
INFO - 16:58:12: minimize y_34(x_3)
INFO - 16:58:12: with respect to x_3
INFO - 16:58:12: subject to constraints:
INFO - 16:58:12: g_3(x_3) <= 0.0
INFO - 16:58:12: over the design space:
INFO - 16:58:12: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:12: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:12: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:12: | x_3 | 0.1 | 0.1765337509472553 | 1 | float |
INFO - 16:58:12: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:12: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:12: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:12:
INFO - 16:58:12: ... 3%|▎ | 1/30 [00:00<00:00, 2218.03 it/sec, obj=0.938]
INFO - 16:58:12:
INFO - 16:58:12: ... 7%|▋ | 2/30 [00:00<00:00, 540.99 it/sec, obj=0.945]
INFO - 16:58:12:
INFO - 16:58:12: ... 10%|█ | 3/30 [00:00<00:00, 593.48 it/sec, obj=0.939]
INFO - 16:58:12:
INFO - 16:58:12: ... 13%|█▎ | 4/30 [00:00<00:00, 487.97 it/sec, obj=0.945]
INFO - 16:58:12:
INFO - 16:58:12:
INFO - 16:58:12: Optimization result:
INFO - 16:58:12: Optimizer info:
INFO - 16:58:12: Status: 8
INFO - 16:58:12: Message: Positive directional derivative for linesearch
INFO - 16:58:12: Number of calls to the objective function by the optimizer: 5
INFO - 16:58:12: Solution:
INFO - 16:58:12: The solution is feasible.
INFO - 16:58:12: Objective: 0.9449429633882062
INFO - 16:58:12: Standardized constraints:
INFO - 16:58:12: g_3 = [-7.57141871e-01 -2.42858129e-01 4.44089210e-16 -1.79769276e-01]
INFO - 16:58:12: Design space:
INFO - 16:58:12: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:12: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:12: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:12: | x_3 | 0.1 | 0.1600060992843753 | 1 | float |
INFO - 16:58:12: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:12: *** End PropulsionScenario execution (time: 0:00:00.014038) ***
INFO - 16:58:12:
INFO - 16:58:12: *** Start AerodynamicsScenario execution ***
INFO - 16:58:12: AerodynamicsScenario
INFO - 16:58:12: Disciplines: SobieskiAerodynamics
INFO - 16:58:12: MDO formulation: DisciplinaryOpt
INFO - 16:58:12: Optimization problem:
INFO - 16:58:12: minimize -y_24(x_2) = -y_24(x_2)
INFO - 16:58:12: with respect to x_2
INFO - 16:58:12: subject to constraints:
INFO - 16:58:12: g_2(x_2) <= 0.0
INFO - 16:58:12: over the design space:
INFO - 16:58:12: +------+-------------+-------+-------------+-------+
INFO - 16:58:12: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:12: +------+-------------+-------+-------------+-------+
INFO - 16:58:12: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:12: +------+-------------+-------+-------------+-------+
INFO - 16:58:12: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:12: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:12:
INFO - 16:58:12: ... 3%|▎ | 1/30 [00:00<00:00, 1161.21 it/sec, obj=-6.66]
INFO - 16:58:12:
INFO - 16:58:12:
INFO - 16:58:12: Optimization result:
INFO - 16:58:12: Optimizer info:
INFO - 16:58:12: Status: 8
INFO - 16:58:12: Message: Positive directional derivative for linesearch
INFO - 16:58:12: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:12: Solution:
INFO - 16:58:12: The solution is feasible.
INFO - 16:58:12: Objective: -6.655663508536703
INFO - 16:58:12: Standardized constraints:
INFO - 16:58:12: g_2 = -5.8399557652411005e-05
INFO - 16:58:12: Design space:
INFO - 16:58:12: +------+-------------+-------+-------------+-------+
INFO - 16:58:12: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:12: +------+-------------+-------+-------------+-------+
INFO - 16:58:12: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:12: +------+-------------+-------+-------------+-------+
INFO - 16:58:12: *** End AerodynamicsScenario execution (time: 0:00:00.006775) ***
INFO - 16:58:12:
INFO - 16:58:12: *** Start StructureScenario execution ***
INFO - 16:58:12: StructureScenario
INFO - 16:58:12: Disciplines: SobieskiStructure
INFO - 16:58:12: MDO formulation: DisciplinaryOpt
INFO - 16:58:12: Optimization problem:
INFO - 16:58:12: minimize -y_11(x_1) = -y_11(x_1)
INFO - 16:58:12: with respect to x_1
INFO - 16:58:12: subject to constraints:
INFO - 16:58:12: g_1(x_1) <= 0.0
INFO - 16:58:12: over the design space:
INFO - 16:58:12: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:12: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:12: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:12: | x_1[0] | 0.1 | 0.3956699005421056 | 0.4 | float |
INFO - 16:58:12: | x_1[1] | 0.75 | 0.7500000000392685 | 1.25 | float |
INFO - 16:58:12: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:12: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:12: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:12:
INFO - 16:58:12: ... 3%|▎ | 1/30 [00:00<00:00, 683.11 it/sec, obj=-.499]
INFO - 16:58:12:
INFO - 16:58:12: ... 7%|▋ | 2/30 [00:00<00:00, 277.21 it/sec, obj=-.408]
INFO - 16:58:12:
INFO - 16:58:12: ... 10%|█ | 3/30 [00:00<00:00, 249.28 it/sec, obj=-.42]
INFO - 16:58:12:
INFO - 16:58:12: ... 13%|█▎ | 4/30 [00:00<00:00, 231.36 it/sec, obj=-.437]
INFO - 16:58:12:
INFO - 16:58:12: ... 17%|█▋ | 5/30 [00:00<00:00, 219.18 it/sec, obj=-.496]
INFO - 16:58:12:
INFO - 16:58:12: ... 20%|██ | 6/30 [00:00<00:00, 214.04 it/sec, obj=-.496]
INFO - 16:58:12:
INFO - 16:58:12: ... 23%|██▎ | 7/30 [00:00<00:00, 210.71 it/sec, obj=-.496]
INFO - 16:58:12:
INFO - 16:58:12: ... 27%|██▋ | 8/30 [00:00<00:00, 206.85 it/sec, obj=-.496]
INFO - 16:58:12:
INFO - 16:58:12: ... 30%|███ | 9/30 [00:00<00:00, 205.17 it/sec, obj=-.496]
INFO - 16:58:12:
INFO - 16:58:12: ... 33%|███▎ | 10/30 [00:00<00:00, 203.76 it/sec, obj=-.496]
INFO - 16:58:12:
INFO - 16:58:12:
INFO - 16:58:12: Optimization result:
INFO - 16:58:12: Optimizer info:
INFO - 16:58:12: Status: None
INFO - 16:58:12: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:58:12: Number of calls to the objective function by the optimizer: 11
INFO - 16:58:12: Solution:
INFO - 16:58:12: The solution is feasible.
INFO - 16:58:12: Objective: -0.49617940485075324
INFO - 16:58:12: Standardized constraints:
INFO - 16:58:12: g_1 = [-1.65867320e-13 -1.01682117e-02 -2.26892382e-02 -3.25816686e-02
INFO - 16:58:12: -4.01682117e-02 -1.89655983e-01 -5.03440170e-02]
INFO - 16:58:12: Design space:
INFO - 16:58:12: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:12: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:12: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:12: | x_1[0] | 0.1 | 0.1919195028170084 | 0.4 | float |
INFO - 16:58:12: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:12: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:12: *** End StructureScenario execution (time: 0:00:00.053578) ***
INFO - 16:58:12: ... 22%|██▏ | 11/50 [00:02<00:08, 4.33 it/sec, obj=-2.94e+3]
INFO - 16:58:12:
INFO - 16:58:12: *** Start PropulsionScenario execution ***
INFO - 16:58:12: PropulsionScenario
INFO - 16:58:12: Disciplines: SobieskiPropulsion
INFO - 16:58:12: MDO formulation: DisciplinaryOpt
INFO - 16:58:12: Optimization problem:
INFO - 16:58:12: minimize y_34(x_3)
INFO - 16:58:12: with respect to x_3
INFO - 16:58:12: subject to constraints:
INFO - 16:58:12: g_3(x_3) <= 0.0
INFO - 16:58:12: over the design space:
INFO - 16:58:12: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:12: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:12: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:12: | x_3 | 0.1 | 0.1600060992843753 | 1 | float |
INFO - 16:58:12: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:12: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:12: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:12:
INFO - 16:58:12: ... 3%|▎ | 1/30 [00:00<00:00, 2000.14 it/sec, obj=0.922]
INFO - 16:58:12:
INFO - 16:58:12: ... 7%|▋ | 2/30 [00:00<00:00, 541.24 it/sec, obj=0.924]
INFO - 16:58:12:
INFO - 16:58:12: ... 10%|█ | 3/30 [00:00<00:00, 574.30 it/sec, obj=0.923]
INFO - 16:58:12:
INFO - 16:58:12: ... 13%|█▎ | 4/30 [00:00<00:00, 492.87 it/sec, obj=0.924]
INFO - 16:58:12:
INFO - 16:58:12: ... 17%|█▋ | 5/30 [00:00<00:00, 451.80 it/sec, obj=0.924]
INFO - 16:58:12:
INFO - 16:58:12: ... 20%|██ | 6/30 [00:00<00:00, 316.22 it/sec, obj=0.924]
INFO - 16:58:12:
INFO - 16:58:12:
INFO - 16:58:12: Optimization result:
INFO - 16:58:12: Optimizer info:
INFO - 16:58:12: Status: None
INFO - 16:58:12: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:58:12: Number of calls to the objective function by the optimizer: 19
INFO - 16:58:12: Solution:
INFO - 16:58:12: The solution is feasible.
INFO - 16:58:12: Objective: 0.9239330847904542
INFO - 16:58:12: Standardized constraints:
INFO - 16:58:12: g_3 = [-6.53253085e-01 -3.46746915e-01 2.22044605e-16 -1.83255000e-01]
INFO - 16:58:12: Design space:
INFO - 16:58:12: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:12: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:12: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:12: | x_3 | 0.1 | 0.1562447456462875 | 1 | float |
INFO - 16:58:12: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:12: *** End PropulsionScenario execution (time: 0:00:00.022917) ***
INFO - 16:58:12:
INFO - 16:58:12: *** Start AerodynamicsScenario execution ***
INFO - 16:58:12: AerodynamicsScenario
INFO - 16:58:12: Disciplines: SobieskiAerodynamics
INFO - 16:58:12: MDO formulation: DisciplinaryOpt
INFO - 16:58:12: Optimization problem:
INFO - 16:58:12: minimize -y_24(x_2) = -y_24(x_2)
INFO - 16:58:12: with respect to x_2
INFO - 16:58:12: subject to constraints:
INFO - 16:58:12: g_2(x_2) <= 0.0
INFO - 16:58:12: over the design space:
INFO - 16:58:12: +------+-------------+-------+-------------+-------+
INFO - 16:58:12: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:12: +------+-------------+-------+-------------+-------+
INFO - 16:58:12: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:12: +------+-------------+-------+-------------+-------+
INFO - 16:58:12: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:12: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:12:
INFO - 16:58:12: ... 3%|▎ | 1/30 [00:00<00:00, 1167.03 it/sec, obj=-6.6]
INFO - 16:58:12:
INFO - 16:58:12:
INFO - 16:58:12: Optimization result:
INFO - 16:58:12: Optimizer info:
INFO - 16:58:12: Status: 8
INFO - 16:58:12: Message: Positive directional derivative for linesearch
INFO - 16:58:12: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:12: Solution:
INFO - 16:58:12: The solution is feasible.
INFO - 16:58:12: Objective: -6.604489795165612
INFO - 16:58:12: Standardized constraints:
INFO - 16:58:12: g_2 = 1.5003189848261655e-05
INFO - 16:58:12: Design space:
INFO - 16:58:12: +------+-------------+-------+-------------+-------+
INFO - 16:58:12: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:12: +------+-------------+-------+-------------+-------+
INFO - 16:58:12: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:12: +------+-------------+-------+-------------+-------+
INFO - 16:58:12: *** End AerodynamicsScenario execution (time: 0:00:00.007147) ***
INFO - 16:58:12:
INFO - 16:58:12: *** Start StructureScenario execution ***
INFO - 16:58:12: StructureScenario
INFO - 16:58:12: Disciplines: SobieskiStructure
INFO - 16:58:12: MDO formulation: DisciplinaryOpt
INFO - 16:58:12: Optimization problem:
INFO - 16:58:12: minimize -y_11(x_1) = -y_11(x_1)
INFO - 16:58:12: with respect to x_1
INFO - 16:58:12: subject to constraints:
INFO - 16:58:12: g_1(x_1) <= 0.0
INFO - 16:58:12: over the design space:
INFO - 16:58:12: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:12: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:12: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:12: | x_1[0] | 0.1 | 0.1919195028170084 | 0.4 | float |
INFO - 16:58:12: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:12: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:12: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:12: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:12:
INFO - 16:58:12: ... 3%|▎ | 1/30 [00:00<00:00, 627.04 it/sec, obj=-.448]
INFO - 16:58:12:
INFO - 16:58:12: ... 7%|▋ | 2/30 [00:00<00:00, 275.09 it/sec, obj=-.448]
INFO - 16:58:12:
INFO - 16:58:12: ... 10%|█ | 3/30 [00:00<00:00, 247.82 it/sec, obj=-.448]
INFO - 16:58:12:
INFO - 16:58:12: ... 13%|█▎ | 4/30 [00:00<00:00, 228.88 it/sec, obj=-.448]
INFO - 16:58:12:
INFO - 16:58:12: ... 17%|█▋ | 5/30 [00:00<00:00, 218.14 it/sec, obj=-.448]
INFO - 16:58:12:
INFO - 16:58:12:
INFO - 16:58:12: Optimization result:
INFO - 16:58:12: Optimizer info:
INFO - 16:58:12: Status: None
INFO - 16:58:12: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:58:12: Number of calls to the objective function by the optimizer: 6
INFO - 16:58:12: Solution:
INFO - 16:58:12: The solution is feasible.
INFO - 16:58:12: Objective: -0.44823186026514394
INFO - 16:58:12: Standardized constraints:
INFO - 16:58:12: g_1 = [-8.92619312e-14 -1.01324921e-02 -2.26490536e-02 -3.25430914e-02
INFO - 16:58:12: -4.01324921e-02 -1.90022428e-01 -4.99775719e-02]
INFO - 16:58:12: Design space:
INFO - 16:58:12: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:12: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:12: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:12: | x_1[0] | 0.1 | 0.1936586008298337 | 0.4 | float |
INFO - 16:58:12: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:12: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:12: *** End StructureScenario execution (time: 0:00:00.027148) ***
INFO - 16:58:13: ... 24%|██▍ | 12/50 [00:02<00:08, 4.22 it/sec, obj=-2.59e+3]
WARNING - 16:58:13: MDAJacobi has reached its maximum number of iterations but the normed residual 1.7359275648513364e-14 is still above the tolerance 1e-14.
INFO - 16:58:13:
INFO - 16:58:13: *** Start PropulsionScenario execution ***
INFO - 16:58:13: PropulsionScenario
INFO - 16:58:13: Disciplines: SobieskiPropulsion
INFO - 16:58:13: MDO formulation: DisciplinaryOpt
INFO - 16:58:13: Optimization problem:
INFO - 16:58:13: minimize y_34(x_3)
INFO - 16:58:13: with respect to x_3
INFO - 16:58:13: subject to constraints:
INFO - 16:58:13: g_3(x_3) <= 0.0
INFO - 16:58:13: over the design space:
INFO - 16:58:13: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:13: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:13: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:13: | x_3 | 0.1 | 0.1562447456462875 | 1 | float |
INFO - 16:58:13: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:13: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:13: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:13:
INFO - 16:58:13: ... 3%|▎ | 1/30 [00:00<00:00, 1880.85 it/sec, obj=0.944]
INFO - 16:58:13:
INFO - 16:58:13: ... 7%|▋ | 2/30 [00:00<00:00, 529.22 it/sec, obj=0.942]
INFO - 16:58:13:
INFO - 16:58:13: ... 10%|█ | 3/30 [00:00<00:00, 467.31 it/sec, obj=0.942]
INFO - 16:58:13:
INFO - 16:58:13: ... 13%|█▎ | 4/30 [00:00<00:00, 492.42 it/sec, obj=0.942]
INFO - 16:58:13:
INFO - 16:58:13:
INFO - 16:58:13: Optimization result:
INFO - 16:58:13: Optimizer info:
INFO - 16:58:13: Status: None
INFO - 16:58:13: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:58:13: Number of calls to the objective function by the optimizer: 5
INFO - 16:58:13: Solution:
INFO - 16:58:13: The solution is feasible.
INFO - 16:58:13: Objective: 0.9422222926202406
INFO - 16:58:13: Standardized constraints:
INFO - 16:58:13: g_3 = [-7.85103113e-01 -2.14896887e-01 1.55431223e-15 -1.80406062e-01]
INFO - 16:58:13: Design space:
INFO - 16:58:13: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:13: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:13: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:13: | x_3 | 0.1 | 0.1596492699793805 | 1 | float |
INFO - 16:58:13: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:13: *** End PropulsionScenario execution (time: 0:00:00.011985) ***
INFO - 16:58:13:
INFO - 16:58:13: *** Start AerodynamicsScenario execution ***
INFO - 16:58:13: AerodynamicsScenario
INFO - 16:58:13: Disciplines: SobieskiAerodynamics
INFO - 16:58:13: MDO formulation: DisciplinaryOpt
INFO - 16:58:13: Optimization problem:
INFO - 16:58:13: minimize -y_24(x_2) = -y_24(x_2)
INFO - 16:58:13: with respect to x_2
INFO - 16:58:13: subject to constraints:
INFO - 16:58:13: g_2(x_2) <= 0.0
INFO - 16:58:13: over the design space:
INFO - 16:58:13: +------+-------------+-------+-------------+-------+
INFO - 16:58:13: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:13: +------+-------------+-------+-------------+-------+
INFO - 16:58:13: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:13: +------+-------------+-------+-------------+-------+
INFO - 16:58:13: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:13: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:13:
INFO - 16:58:13: ... 3%|▎ | 1/30 [00:00<00:00, 1167.35 it/sec, obj=-7.17]
INFO - 16:58:13:
WARNING - 16:58:13: Optimization found no feasible point ! The least infeasible point is selected.
INFO - 16:58:13:
INFO - 16:58:13: Optimization result:
INFO - 16:58:13: Optimizer info:
INFO - 16:58:13: Status: 8
INFO - 16:58:13: Message: Positive directional derivative for linesearch
INFO - 16:58:13: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:13: Solution:
WARNING - 16:58:13: The solution is not feasible.
INFO - 16:58:13: Objective: -7.168929178820706
INFO - 16:58:13: Standardized constraints:
INFO - 16:58:13: g_2 = 0.0002470990023344388
INFO - 16:58:13: Design space:
INFO - 16:58:13: +------+-------------+-------+-------------+-------+
INFO - 16:58:13: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:13: +------+-------------+-------+-------------+-------+
INFO - 16:58:13: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:13: +------+-------------+-------+-------------+-------+
INFO - 16:58:13: *** End AerodynamicsScenario execution (time: 0:00:00.006963) ***
INFO - 16:58:13:
INFO - 16:58:13: *** Start StructureScenario execution ***
INFO - 16:58:13: StructureScenario
INFO - 16:58:13: Disciplines: SobieskiStructure
INFO - 16:58:13: MDO formulation: DisciplinaryOpt
INFO - 16:58:13: Optimization problem:
INFO - 16:58:13: minimize -y_11(x_1) = -y_11(x_1)
INFO - 16:58:13: with respect to x_1
INFO - 16:58:13: subject to constraints:
INFO - 16:58:13: g_1(x_1) <= 0.0
INFO - 16:58:13: over the design space:
INFO - 16:58:13: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:13: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:13: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:13: | x_1[0] | 0.1 | 0.1936586008298337 | 0.4 | float |
INFO - 16:58:13: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:13: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:13: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:13: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:13:
INFO - 16:58:13: ... 3%|▎ | 1/30 [00:00<00:00, 518.71 it/sec, obj=-.487]
INFO - 16:58:13:
INFO - 16:58:13: ... 7%|▋ | 2/30 [00:00<00:00, 266.23 it/sec, obj=-.487]
INFO - 16:58:13:
INFO - 16:58:13: ... 10%|█ | 3/30 [00:00<00:00, 237.34 it/sec, obj=-.487]
INFO - 16:58:13:
INFO - 16:58:13: ... 13%|█▎ | 4/30 [00:00<00:00, 221.36 it/sec, obj=-.488]
INFO - 16:58:13:
INFO - 16:58:13: ... 17%|█▋ | 5/30 [00:00<00:00, 214.83 it/sec, obj=-.488]
INFO - 16:58:13:
INFO - 16:58:13: ... 20%|██ | 6/30 [00:00<00:00, 210.24 it/sec, obj=-.488]
INFO - 16:58:13:
INFO - 16:58:13: ... 23%|██▎ | 7/30 [00:00<00:00, 205.21 it/sec, obj=-.488]
INFO - 16:58:13:
INFO - 16:58:13: ... 27%|██▋ | 8/30 [00:00<00:00, 203.56 it/sec, obj=-.488]
INFO - 16:58:13:
INFO - 16:58:13:
INFO - 16:58:13: Optimization result:
INFO - 16:58:13: Optimizer info:
INFO - 16:58:13: Status: None
INFO - 16:58:13: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:58:13: Number of calls to the objective function by the optimizer: 9
INFO - 16:58:13: Solution:
INFO - 16:58:13: The solution is feasible.
INFO - 16:58:13: Objective: -0.48819683050140195
INFO - 16:58:13: Standardized constraints:
INFO - 16:58:13: g_1 = [-1.36779477e-13 -1.28509729e-02 -2.57073445e-02 -3.54790507e-02
INFO - 16:58:13: -4.28509729e-02 -1.80268194e-01 -5.97318060e-02]
INFO - 16:58:13: Design space:
INFO - 16:58:13: +--------+-------------+-------------------+-------------+-------+
INFO - 16:58:13: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:13: +--------+-------------+-------------------+-------------+-------+
INFO - 16:58:13: | x_1[0] | 0.1 | 0.266941525843413 | 0.4 | float |
INFO - 16:58:13: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:13: +--------+-------------+-------------------+-------------+-------+
INFO - 16:58:13: *** End StructureScenario execution (time: 0:00:00.043722) ***
INFO - 16:58:13: ... 26%|██▌ | 13/50 [00:03<00:08, 4.23 it/sec, obj=-3.01e+3]
INFO - 16:58:13:
INFO - 16:58:13: *** Start PropulsionScenario execution ***
INFO - 16:58:13: PropulsionScenario
INFO - 16:58:13: Disciplines: SobieskiPropulsion
INFO - 16:58:13: MDO formulation: DisciplinaryOpt
INFO - 16:58:13: Optimization problem:
INFO - 16:58:13: minimize y_34(x_3)
INFO - 16:58:13: with respect to x_3
INFO - 16:58:13: subject to constraints:
INFO - 16:58:13: g_3(x_3) <= 0.0
INFO - 16:58:13: over the design space:
INFO - 16:58:13: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:13: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:13: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:13: | x_3 | 0.1 | 0.1596492699793805 | 1 | float |
INFO - 16:58:13: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:13: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:13: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:13:
INFO - 16:58:13: ... 3%|▎ | 1/30 [00:00<00:00, 2222.74 it/sec, obj=0.959]
INFO - 16:58:13:
INFO - 16:58:13: ... 7%|▋ | 2/30 [00:00<00:00, 526.82 it/sec, obj=0.956]
INFO - 16:58:13:
INFO - 16:58:13: ... 10%|█ | 3/30 [00:00<00:00, 485.81 it/sec, obj=0.956]
INFO - 16:58:13:
INFO - 16:58:13: ... 13%|█▎ | 4/30 [00:00<00:00, 493.51 it/sec, obj=0.956]
INFO - 16:58:13:
INFO - 16:58:13:
INFO - 16:58:13: Optimization result:
INFO - 16:58:13: Optimizer info:
INFO - 16:58:13: Status: None
INFO - 16:58:13: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:58:13: Number of calls to the objective function by the optimizer: 5
INFO - 16:58:13: Solution:
INFO - 16:58:13: The solution is feasible.
INFO - 16:58:13: Objective: 0.9564693887113105
INFO - 16:58:13: Standardized constraints:
INFO - 16:58:13: g_3 = [-7.68996856e-01 -2.31003144e-01 -5.55111512e-16 -1.79659661e-01]
INFO - 16:58:13: Design space:
INFO - 16:58:13: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:13: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:13: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:13: | x_3 | 0.1 | 0.1641229776652043 | 1 | float |
INFO - 16:58:13: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:13: *** End PropulsionScenario execution (time: 0:00:00.011837) ***
INFO - 16:58:13:
INFO - 16:58:13: *** Start AerodynamicsScenario execution ***
INFO - 16:58:13: AerodynamicsScenario
INFO - 16:58:13: Disciplines: SobieskiAerodynamics
INFO - 16:58:13: MDO formulation: DisciplinaryOpt
INFO - 16:58:13: Optimization problem:
INFO - 16:58:13: minimize -y_24(x_2) = -y_24(x_2)
INFO - 16:58:13: with respect to x_2
INFO - 16:58:13: subject to constraints:
INFO - 16:58:13: g_2(x_2) <= 0.0
INFO - 16:58:13: over the design space:
INFO - 16:58:13: +------+-------------+-------+-------------+-------+
INFO - 16:58:13: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:13: +------+-------------+-------+-------------+-------+
INFO - 16:58:13: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:13: +------+-------------+-------+-------------+-------+
INFO - 16:58:13: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:13: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:13:
INFO - 16:58:13: ... 3%|▎ | 1/30 [00:00<00:00, 985.27 it/sec, obj=-6.71]
INFO - 16:58:13:
INFO - 16:58:13:
INFO - 16:58:13: Optimization result:
INFO - 16:58:13: Optimizer info:
INFO - 16:58:13: Status: 8
INFO - 16:58:13: Message: Positive directional derivative for linesearch
INFO - 16:58:13: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:13: Solution:
INFO - 16:58:13: The solution is feasible.
INFO - 16:58:13: Objective: -6.710132707255481
INFO - 16:58:13: Standardized constraints:
INFO - 16:58:13: g_2 = -0.004203243844928872
INFO - 16:58:13: Design space:
INFO - 16:58:13: +------+-------------+-------+-------------+-------+
INFO - 16:58:13: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:13: +------+-------------+-------+-------------+-------+
INFO - 16:58:13: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:13: +------+-------------+-------+-------------+-------+
INFO - 16:58:13: *** End AerodynamicsScenario execution (time: 0:00:00.006994) ***
INFO - 16:58:13:
INFO - 16:58:13: *** Start StructureScenario execution ***
INFO - 16:58:13: StructureScenario
INFO - 16:58:13: Disciplines: SobieskiStructure
INFO - 16:58:13: MDO formulation: DisciplinaryOpt
INFO - 16:58:13: Optimization problem:
INFO - 16:58:13: minimize -y_11(x_1) = -y_11(x_1)
INFO - 16:58:13: with respect to x_1
INFO - 16:58:13: subject to constraints:
INFO - 16:58:13: g_1(x_1) <= 0.0
INFO - 16:58:13: over the design space:
INFO - 16:58:13: +--------+-------------+-------------------+-------------+-------+
INFO - 16:58:13: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:13: +--------+-------------+-------------------+-------------+-------+
INFO - 16:58:13: | x_1[0] | 0.1 | 0.266941525843413 | 0.4 | float |
INFO - 16:58:13: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:13: +--------+-------------+-------------------+-------------+-------+
INFO - 16:58:13: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:13: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:13:
INFO - 16:58:13: ... 3%|▎ | 1/30 [00:00<00:00, 695.57 it/sec, obj=-.489]
INFO - 16:58:13:
INFO - 16:58:13: ... 7%|▋ | 2/30 [00:00<00:00, 272.50 it/sec, obj=-.426]
INFO - 16:58:13:
INFO - 16:58:13: ... 10%|█ | 3/30 [00:00<00:00, 237.90 it/sec, obj=-.45]
INFO - 16:58:13:
INFO - 16:58:13: ... 13%|█▎ | 4/30 [00:00<00:00, 223.54 it/sec, obj=-.487]
INFO - 16:58:13:
INFO - 16:58:13: ... 17%|█▋ | 5/30 [00:00<00:00, 214.62 it/sec, obj=-.487]
INFO - 16:58:13:
INFO - 16:58:13: ... 20%|██ | 6/30 [00:00<00:00, 210.03 it/sec, obj=-.487]
INFO - 16:58:13:
INFO - 16:58:13: ... 23%|██▎ | 7/30 [00:00<00:00, 207.28 it/sec, obj=-.487]
INFO - 16:58:13:
INFO - 16:58:13: ... 27%|██▋ | 8/30 [00:00<00:00, 204.63 it/sec, obj=-.487]
INFO - 16:58:13:
INFO - 16:58:13:
INFO - 16:58:13: Optimization result:
INFO - 16:58:13: Optimizer info:
INFO - 16:58:13: Status: None
INFO - 16:58:13: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:58:13: Number of calls to the objective function by the optimizer: 9
INFO - 16:58:13: Solution:
INFO - 16:58:13: The solution is feasible.
INFO - 16:58:13: Objective: -0.4873488138508212
INFO - 16:58:13: Standardized constraints:
INFO - 16:58:13: g_1 = [-5.95301586e-13 -1.26322508e-02 -2.54612821e-02 -3.52428308e-02
INFO - 16:58:13: -4.26322508e-02 -1.67615255e-01 -7.23847454e-02]
INFO - 16:58:13: Design space:
INFO - 16:58:13: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:13: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:13: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:13: | x_1[0] | 0.1 | 0.1203497839157382 | 0.4 | float |
INFO - 16:58:13: | x_1[1] | 0.75 | 0.7500000000004761 | 1.25 | float |
INFO - 16:58:13: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:13: *** End StructureScenario execution (time: 0:00:00.043518) ***
INFO - 16:58:13: ... 28%|██▊ | 14/50 [00:03<00:08, 4.25 it/sec, obj=-2.79e+3]
INFO - 16:58:13:
INFO - 16:58:13: *** Start PropulsionScenario execution ***
INFO - 16:58:13: PropulsionScenario
INFO - 16:58:13: Disciplines: SobieskiPropulsion
INFO - 16:58:13: MDO formulation: DisciplinaryOpt
INFO - 16:58:13: Optimization problem:
INFO - 16:58:13: minimize y_34(x_3)
INFO - 16:58:13: with respect to x_3
INFO - 16:58:13: subject to constraints:
INFO - 16:58:13: g_3(x_3) <= 0.0
INFO - 16:58:13: over the design space:
INFO - 16:58:13: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:13: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:13: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:13: | x_3 | 0.1 | 0.1641229776652043 | 1 | float |
INFO - 16:58:13: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:13: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:13: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:13:
INFO - 16:58:13: ... 3%|▎ | 1/30 [00:00<00:00, 1180.83 it/sec, obj=0.959]
INFO - 16:58:13:
INFO - 16:58:13: ... 7%|▋ | 2/30 [00:00<00:00, 463.13 it/sec, obj=0.959]
INFO - 16:58:13:
INFO - 16:58:13: ... 10%|█ | 3/30 [00:00<00:00, 422.87 it/sec, obj=0.959]
INFO - 16:58:13:
INFO - 16:58:13: ... 13%|█▎ | 4/30 [00:00<00:00, 387.38 it/sec, obj=0.959]
INFO - 16:58:13:
INFO - 16:58:13:
INFO - 16:58:13: Optimization result:
INFO - 16:58:13: Optimizer info:
INFO - 16:58:13: Status: None
INFO - 16:58:13: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:58:13: Number of calls to the objective function by the optimizer: 8
INFO - 16:58:13: Solution:
INFO - 16:58:13: The solution is feasible.
INFO - 16:58:13: Objective: 0.9589456316808966
INFO - 16:58:13: Standardized constraints:
INFO - 16:58:13: g_3 = [-7.61888661e-01 -2.38111339e-01 6.66133815e-16 -1.79686118e-01]
INFO - 16:58:13: Design space:
INFO - 16:58:13: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:13: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:13: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:13: | x_3 | 0.1 | 0.1651253233268959 | 1 | float |
INFO - 16:58:13: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:13: *** End PropulsionScenario execution (time: 0:00:00.014253) ***
INFO - 16:58:13:
INFO - 16:58:13: *** Start AerodynamicsScenario execution ***
INFO - 16:58:13: AerodynamicsScenario
INFO - 16:58:13: Disciplines: SobieskiAerodynamics
INFO - 16:58:13: MDO formulation: DisciplinaryOpt
INFO - 16:58:13: Optimization problem:
INFO - 16:58:13: minimize -y_24(x_2) = -y_24(x_2)
INFO - 16:58:13: with respect to x_2
INFO - 16:58:13: subject to constraints:
INFO - 16:58:13: g_2(x_2) <= 0.0
INFO - 16:58:13: over the design space:
INFO - 16:58:13: +------+-------------+-------+-------------+-------+
INFO - 16:58:13: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:13: +------+-------------+-------+-------------+-------+
INFO - 16:58:13: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:13: +------+-------------+-------+-------------+-------+
INFO - 16:58:13: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:13: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:13:
INFO - 16:58:13: ... 3%|▎ | 1/30 [00:00<00:00, 1074.64 it/sec, obj=-6.66]
INFO - 16:58:13:
INFO - 16:58:13:
INFO - 16:58:13: Optimization result:
INFO - 16:58:13: Optimizer info:
INFO - 16:58:13: Status: 8
INFO - 16:58:13: Message: Positive directional derivative for linesearch
INFO - 16:58:13: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:13: Solution:
INFO - 16:58:13: The solution is feasible.
INFO - 16:58:13: Objective: -6.659836727891284
INFO - 16:58:13: Standardized constraints:
INFO - 16:58:13: g_2 = -0.0015918865814934513
INFO - 16:58:13: Design space:
INFO - 16:58:13: +------+-------------+-------+-------------+-------+
INFO - 16:58:13: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:13: +------+-------------+-------+-------------+-------+
INFO - 16:58:13: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:13: +------+-------------+-------+-------------+-------+
INFO - 16:58:13: *** End AerodynamicsScenario execution (time: 0:00:00.007235) ***
INFO - 16:58:13:
INFO - 16:58:13: *** Start StructureScenario execution ***
INFO - 16:58:13: StructureScenario
INFO - 16:58:13: Disciplines: SobieskiStructure
INFO - 16:58:13: MDO formulation: DisciplinaryOpt
INFO - 16:58:13: Optimization problem:
INFO - 16:58:13: minimize -y_11(x_1) = -y_11(x_1)
INFO - 16:58:13: with respect to x_1
INFO - 16:58:13: subject to constraints:
INFO - 16:58:13: g_1(x_1) <= 0.0
INFO - 16:58:13: over the design space:
INFO - 16:58:13: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:13: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:13: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:13: | x_1[0] | 0.1 | 0.1203497839157382 | 0.4 | float |
INFO - 16:58:13: | x_1[1] | 0.75 | 0.7500000000004761 | 1.25 | float |
INFO - 16:58:13: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:13: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:13: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:13:
INFO - 16:58:13: ... 3%|▎ | 1/30 [00:00<00:00, 635.60 it/sec, obj=-.493]
INFO - 16:58:13:
INFO - 16:58:13: ... 7%|▋ | 2/30 [00:00<00:00, 275.39 it/sec, obj=-.493]
INFO - 16:58:13:
INFO - 16:58:13: ... 10%|█ | 3/30 [00:00<00:00, 248.41 it/sec, obj=-.493]
INFO - 16:58:13:
INFO - 16:58:13: ... 13%|█▎ | 4/30 [00:00<00:00, 229.93 it/sec, obj=-.494]
INFO - 16:58:13:
INFO - 16:58:13: ... 17%|█▋ | 5/30 [00:00<00:00, 219.48 it/sec, obj=-.494]
INFO - 16:58:13:
INFO - 16:58:13: ... 20%|██ | 6/30 [00:00<00:00, 214.37 it/sec, obj=-.494]
INFO - 16:58:13:
INFO - 16:58:13: ... 23%|██▎ | 7/30 [00:00<00:00, 209.58 it/sec, obj=-.494]
INFO - 16:58:13:
INFO - 16:58:13: ... 27%|██▋ | 8/30 [00:00<00:00, 206.59 it/sec, obj=-.494]
INFO - 16:58:13:
INFO - 16:58:13:
INFO - 16:58:13: Optimization result:
INFO - 16:58:13: Optimizer info:
INFO - 16:58:13: Status: None
INFO - 16:58:13: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:58:13: Number of calls to the objective function by the optimizer: 9
INFO - 16:58:13: Solution:
INFO - 16:58:13: The solution is feasible.
INFO - 16:58:13: Objective: -0.49380086163641057
INFO - 16:58:13: Standardized constraints:
INFO - 16:58:13: g_1 = [ 4.88498131e-15 -1.15329861e-02 -2.42246093e-02 -3.40556249e-02
INFO - 16:58:13: -4.15329861e-02 -1.79587398e-01 -6.04126022e-02]
INFO - 16:58:13: Design space:
INFO - 16:58:13: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:13: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:13: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:13: | x_1[0] | 0.1 | 0.1733074083776777 | 0.4 | float |
INFO - 16:58:13: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:13: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:13: *** End StructureScenario execution (time: 0:00:00.043198) ***
INFO - 16:58:13: ... 30%|███ | 15/50 [00:03<00:08, 4.31 it/sec, obj=-2.8e+3]
INFO - 16:58:13:
INFO - 16:58:13: *** Start PropulsionScenario execution ***
INFO - 16:58:13: PropulsionScenario
INFO - 16:58:13: Disciplines: SobieskiPropulsion
INFO - 16:58:13: MDO formulation: DisciplinaryOpt
INFO - 16:58:13: Optimization problem:
INFO - 16:58:13: minimize y_34(x_3)
INFO - 16:58:13: with respect to x_3
INFO - 16:58:13: subject to constraints:
INFO - 16:58:13: g_3(x_3) <= 0.0
INFO - 16:58:13: over the design space:
INFO - 16:58:13: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:13: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:13: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:13: | x_3 | 0.1 | 0.1651253233268959 | 1 | float |
INFO - 16:58:13: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:13: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:13: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:13:
INFO - 16:58:13: ... 3%|▎ | 1/30 [00:00<00:00, 1853.43 it/sec, obj=1.01]
INFO - 16:58:13:
INFO - 16:58:13: ... 7%|▋ | 2/30 [00:00<00:00, 535.77 it/sec, obj=0.998]
INFO - 16:58:13:
INFO - 16:58:13:
INFO - 16:58:13: Optimization result:
INFO - 16:58:13: Optimizer info:
INFO - 16:58:13: Status: 8
INFO - 16:58:13: Message: Positive directional derivative for linesearch
INFO - 16:58:13: Number of calls to the objective function by the optimizer: 3
INFO - 16:58:13: Solution:
INFO - 16:58:13: The solution is feasible.
INFO - 16:58:13: Objective: 0.9981671494570588
INFO - 16:58:13: Standardized constraints:
INFO - 16:58:13: g_3 = [-0.74728023 -0.25271977 0. -0.17961764]
INFO - 16:58:13: Design space:
INFO - 16:58:13: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:13: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:13: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:13: | x_3 | 0.1 | 0.1846316690449201 | 1 | float |
INFO - 16:58:13: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:13: *** End PropulsionScenario execution (time: 0:00:00.009025) ***
INFO - 16:58:13:
INFO - 16:58:13: *** Start AerodynamicsScenario execution ***
INFO - 16:58:13: AerodynamicsScenario
INFO - 16:58:13: Disciplines: SobieskiAerodynamics
INFO - 16:58:13: MDO formulation: DisciplinaryOpt
INFO - 16:58:13: Optimization problem:
INFO - 16:58:13: minimize -y_24(x_2) = -y_24(x_2)
INFO - 16:58:13: with respect to x_2
INFO - 16:58:13: subject to constraints:
INFO - 16:58:13: g_2(x_2) <= 0.0
INFO - 16:58:13: over the design space:
INFO - 16:58:13: +------+-------------+-------+-------------+-------+
INFO - 16:58:13: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:13: +------+-------------+-------+-------------+-------+
INFO - 16:58:13: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:13: +------+-------------+-------+-------------+-------+
INFO - 16:58:13: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:13: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:13:
INFO - 16:58:13: ... 3%|▎ | 1/30 [00:00<00:00, 1030.79 it/sec, obj=-6.07]
INFO - 16:58:13:
INFO - 16:58:13:
INFO - 16:58:13: Optimization result:
INFO - 16:58:13: Optimizer info:
INFO - 16:58:13: Status: 8
INFO - 16:58:13: Message: Positive directional derivative for linesearch
INFO - 16:58:13: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:13: Solution:
INFO - 16:58:13: The solution is feasible.
INFO - 16:58:13: Objective: -6.066365024776768
INFO - 16:58:13: Standardized constraints:
INFO - 16:58:13: g_2 = -0.002726757534252666
INFO - 16:58:13: Design space:
INFO - 16:58:13: +------+-------------+-------+-------------+-------+
INFO - 16:58:13: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:13: +------+-------------+-------+-------------+-------+
INFO - 16:58:13: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:13: +------+-------------+-------+-------------+-------+
INFO - 16:58:13: *** End AerodynamicsScenario execution (time: 0:00:00.006792) ***
INFO - 16:58:13:
INFO - 16:58:13: *** Start StructureScenario execution ***
INFO - 16:58:13: StructureScenario
INFO - 16:58:13: Disciplines: SobieskiStructure
INFO - 16:58:13: MDO formulation: DisciplinaryOpt
INFO - 16:58:13: Optimization problem:
INFO - 16:58:13: minimize -y_11(x_1) = -y_11(x_1)
INFO - 16:58:13: with respect to x_1
INFO - 16:58:13: subject to constraints:
INFO - 16:58:13: g_1(x_1) <= 0.0
INFO - 16:58:13: over the design space:
INFO - 16:58:13: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:13: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:13: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:13: | x_1[0] | 0.1 | 0.1733074083776777 | 0.4 | float |
INFO - 16:58:13: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:13: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:13: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:13: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:13:
INFO - 16:58:13: ... 3%|▎ | 1/30 [00:00<00:00, 699.17 it/sec, obj=-.493]
INFO - 16:58:13:
INFO - 16:58:13: ... 7%|▋ | 2/30 [00:00<00:00, 275.84 it/sec, obj=-.492]
INFO - 16:58:13:
INFO - 16:58:13: ... 10%|█ | 3/30 [00:00<00:00, 247.16 it/sec, obj=-.492]
INFO - 16:58:13:
INFO - 16:58:13: ... 13%|█▎ | 4/30 [00:00<00:00, 229.47 it/sec, obj=-.492]
INFO - 16:58:13:
INFO - 16:58:13: ... 17%|█▋ | 5/30 [00:00<00:00, 211.94 it/sec, obj=-.492]
INFO - 16:58:13:
INFO - 16:58:13:
INFO - 16:58:13: Optimization result:
INFO - 16:58:13: Optimizer info:
INFO - 16:58:13: Status: None
INFO - 16:58:13: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:58:13: Number of calls to the objective function by the optimizer: 6
INFO - 16:58:13: Solution:
INFO - 16:58:13: The solution is feasible.
INFO - 16:58:13: Objective: -0.4924450817677964
INFO - 16:58:13: Standardized constraints:
INFO - 16:58:13: g_1 = [-7.79376563e-14 -1.17952167e-02 -2.45196188e-02 -3.43388341e-02
INFO - 16:58:13: -4.17952167e-02 -1.75209774e-01 -6.47902262e-02]
INFO - 16:58:13: Design space:
INFO - 16:58:13: +--------+-------------+-------------------+-------------+-------+
INFO - 16:58:13: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:13: +--------+-------------+-------------------+-------------+-------+
INFO - 16:58:13: | x_1[0] | 0.1 | 0.143102721739333 | 0.4 | float |
INFO - 16:58:13: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:13: +--------+-------------+-------------------+-------------+-------+
INFO - 16:58:13: *** End StructureScenario execution (time: 0:00:00.028875) ***
INFO - 16:58:13: ... 32%|███▏ | 16/50 [00:03<00:07, 4.31 it/sec, obj=-2.38e+3]
WARNING - 16:58:14: MDAJacobi has reached its maximum number of iterations but the normed residual 1.7359275648513364e-14 is still above the tolerance 1e-14.
INFO - 16:58:14:
INFO - 16:58:14: *** Start PropulsionScenario execution ***
INFO - 16:58:14: PropulsionScenario
INFO - 16:58:14: Disciplines: SobieskiPropulsion
INFO - 16:58:14: MDO formulation: DisciplinaryOpt
INFO - 16:58:14: Optimization problem:
INFO - 16:58:14: minimize y_34(x_3)
INFO - 16:58:14: with respect to x_3
INFO - 16:58:14: subject to constraints:
INFO - 16:58:14: g_3(x_3) <= 0.0
INFO - 16:58:14: over the design space:
INFO - 16:58:14: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:14: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:14: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:14: | x_3 | 0.1 | 0.1846316690449201 | 1 | float |
INFO - 16:58:14: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:14: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:14: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:14:
INFO - 16:58:14: ... 3%|▎ | 1/30 [00:00<00:00, 2253.79 it/sec, obj=0.913]
INFO - 16:58:14:
INFO - 16:58:14: ... 7%|▋ | 2/30 [00:00<00:00, 531.16 it/sec, obj=0.924]
INFO - 16:58:14:
INFO - 16:58:14: ... 10%|█ | 3/30 [00:00<00:00, 595.39 it/sec, obj=0.915]
INFO - 16:58:14:
INFO - 16:58:14: ... 13%|█▎ | 4/30 [00:00<00:00, 492.16 it/sec, obj=0.924]
INFO - 16:58:14:
INFO - 16:58:14:
INFO - 16:58:14: Optimization result:
INFO - 16:58:14: Optimizer info:
INFO - 16:58:14: Status: 8
INFO - 16:58:14: Message: Positive directional derivative for linesearch
INFO - 16:58:14: Number of calls to the objective function by the optimizer: 8
INFO - 16:58:14: Solution:
INFO - 16:58:14: The solution is feasible.
INFO - 16:58:14: Objective: 0.9239330847904542
INFO - 16:58:14: Standardized constraints:
INFO - 16:58:14: g_3 = [-7.63547810e-01 -2.36452190e-01 2.22044605e-16 -1.83255000e-01]
INFO - 16:58:14: Design space:
INFO - 16:58:14: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:14: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:14: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:14: | x_3 | 0.1 | 0.1562447456462875 | 1 | float |
INFO - 16:58:14: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:14: *** End PropulsionScenario execution (time: 0:00:00.015001) ***
INFO - 16:58:14:
INFO - 16:58:14: *** Start AerodynamicsScenario execution ***
INFO - 16:58:14: AerodynamicsScenario
INFO - 16:58:14: Disciplines: SobieskiAerodynamics
INFO - 16:58:14: MDO formulation: DisciplinaryOpt
INFO - 16:58:14: Optimization problem:
INFO - 16:58:14: minimize -y_24(x_2) = -y_24(x_2)
INFO - 16:58:14: with respect to x_2
INFO - 16:58:14: subject to constraints:
INFO - 16:58:14: g_2(x_2) <= 0.0
INFO - 16:58:14: over the design space:
INFO - 16:58:14: +------+-------------+-------+-------------+-------+
INFO - 16:58:14: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:14: +------+-------------+-------+-------------+-------+
INFO - 16:58:14: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:14: +------+-------------+-------+-------------+-------+
INFO - 16:58:14: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:14: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:14:
INFO - 16:58:14: ... 3%|▎ | 1/30 [00:00<00:00, 991.09 it/sec, obj=-6.72]
INFO - 16:58:14:
WARNING - 16:58:14: Optimization found no feasible point ! The least infeasible point is selected.
INFO - 16:58:14:
INFO - 16:58:14: Optimization result:
INFO - 16:58:14: Optimizer info:
INFO - 16:58:14: Status: 8
INFO - 16:58:14: Message: Positive directional derivative for linesearch
INFO - 16:58:14: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:14: Solution:
WARNING - 16:58:14: The solution is not feasible.
INFO - 16:58:14: Objective: -6.720865503621089
INFO - 16:58:14: Standardized constraints:
INFO - 16:58:14: g_2 = 0.0023534128225597417
INFO - 16:58:14: Design space:
INFO - 16:58:14: +------+-------------+-------+-------------+-------+
INFO - 16:58:14: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:14: +------+-------------+-------+-------------+-------+
INFO - 16:58:14: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:14: +------+-------------+-------+-------------+-------+
INFO - 16:58:14: *** End AerodynamicsScenario execution (time: 0:00:00.006958) ***
INFO - 16:58:14:
INFO - 16:58:14: *** Start StructureScenario execution ***
INFO - 16:58:14: StructureScenario
INFO - 16:58:14: Disciplines: SobieskiStructure
INFO - 16:58:14: MDO formulation: DisciplinaryOpt
INFO - 16:58:14: Optimization problem:
INFO - 16:58:14: minimize -y_11(x_1) = -y_11(x_1)
INFO - 16:58:14: with respect to x_1
INFO - 16:58:14: subject to constraints:
INFO - 16:58:14: g_1(x_1) <= 0.0
INFO - 16:58:14: over the design space:
INFO - 16:58:14: +--------+-------------+-------------------+-------------+-------+
INFO - 16:58:14: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:14: +--------+-------------+-------------------+-------------+-------+
INFO - 16:58:14: | x_1[0] | 0.1 | 0.143102721739333 | 0.4 | float |
INFO - 16:58:14: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:14: +--------+-------------+-------------------+-------------+-------+
INFO - 16:58:14: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:14: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:14:
INFO - 16:58:14: ... 3%|▎ | 1/30 [00:00<00:00, 702.80 it/sec, obj=-.492]
INFO - 16:58:14:
INFO - 16:58:14: ... 7%|▋ | 2/30 [00:00<00:00, 283.61 it/sec, obj=-.492]
INFO - 16:58:14:
INFO - 16:58:14: ... 10%|█ | 3/30 [00:00<00:00, 249.59 it/sec, obj=-.493]
INFO - 16:58:14:
INFO - 16:58:14: ... 13%|█▎ | 4/30 [00:00<00:00, 232.19 it/sec, obj=-.493]
INFO - 16:58:14:
INFO - 16:58:14: ... 17%|█▋ | 5/30 [00:00<00:00, 222.78 it/sec, obj=-.494]
INFO - 16:58:14:
INFO - 16:58:14: ... 20%|██ | 6/30 [00:00<00:00, 215.08 it/sec, obj=-.494]
INFO - 16:58:14:
INFO - 16:58:14: ... 23%|██▎ | 7/30 [00:00<00:00, 211.70 it/sec, obj=-.494]
INFO - 16:58:14:
INFO - 16:58:14: ... 27%|██▋ | 8/30 [00:00<00:00, 208.38 it/sec, obj=-.494]
INFO - 16:58:14:
INFO - 16:58:14:
INFO - 16:58:14: Optimization result:
INFO - 16:58:14: Optimizer info:
INFO - 16:58:14: Status: None
INFO - 16:58:14: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:58:14: Number of calls to the objective function by the optimizer: 9
INFO - 16:58:14: Solution:
INFO - 16:58:14: The solution is feasible.
INFO - 16:58:14: Objective: -0.493519628580912
INFO - 16:58:14: Standardized constraints:
INFO - 16:58:14: g_1 = [-4.79616347e-14 -7.07739882e-03 -1.92120737e-02 -2.92435907e-02
INFO - 16:58:14: -3.70773988e-02 -2.09702993e-01 -3.02970071e-02]
INFO - 16:58:14: Design space:
INFO - 16:58:14: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:14: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:14: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:14: | x_1[0] | 0.1 | 0.2159238934745972 | 0.4 | float |
INFO - 16:58:14: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:14: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:14: *** End StructureScenario execution (time: 0:00:00.042934) ***
INFO - 16:58:14: ... 34%|███▍ | 17/50 [00:03<00:07, 4.30 it/sec, obj=-3e+3]
WARNING - 16:58:14: MDAJacobi has reached its maximum number of iterations but the normed residual 1.7893531772718828e-14 is still above the tolerance 1e-14.
INFO - 16:58:14:
INFO - 16:58:14: *** Start PropulsionScenario execution ***
INFO - 16:58:14: PropulsionScenario
INFO - 16:58:14: Disciplines: SobieskiPropulsion
INFO - 16:58:14: MDO formulation: DisciplinaryOpt
INFO - 16:58:14: Optimization problem:
INFO - 16:58:14: minimize y_34(x_3)
INFO - 16:58:14: with respect to x_3
INFO - 16:58:14: subject to constraints:
INFO - 16:58:14: g_3(x_3) <= 0.0
INFO - 16:58:14: over the design space:
INFO - 16:58:14: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:14: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:14: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:14: | x_3 | 0.1 | 0.1562447456462875 | 1 | float |
INFO - 16:58:14: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:14: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:14: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:14:
INFO - 16:58:14: ... 3%|▎ | 1/30 [00:00<00:00, 2239.35 it/sec, obj=0.95]
INFO - 16:58:14:
INFO - 16:58:14: ... 7%|▋ | 2/30 [00:00<00:00, 527.65 it/sec, obj=0.947]
INFO - 16:58:14:
INFO - 16:58:14:
INFO - 16:58:14: Optimization result:
INFO - 16:58:14: Optimizer info:
INFO - 16:58:14: Status: 8
INFO - 16:58:14: Message: Positive directional derivative for linesearch
INFO - 16:58:14: Number of calls to the objective function by the optimizer: 3
INFO - 16:58:14: Solution:
INFO - 16:58:14: The solution is feasible.
INFO - 16:58:14: Objective: 0.9474606086644953
INFO - 16:58:14: Standardized constraints:
INFO - 16:58:14: g_3 = [-7.62185643e-01 -2.37814357e-01 4.44089210e-16 -1.79586345e-01]
INFO - 16:58:14: Design space:
INFO - 16:58:14: +------+-------------+-------------------+-------------+-------+
INFO - 16:58:14: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:14: +------+-------------+-------------------+-------------+-------+
INFO - 16:58:14: | x_3 | 0.1 | 0.160716994553237 | 1 | float |
INFO - 16:58:14: +------+-------------+-------------------+-------------+-------+
INFO - 16:58:14: *** End PropulsionScenario execution (time: 0:00:00.012944) ***
INFO - 16:58:14:
INFO - 16:58:14: *** Start AerodynamicsScenario execution ***
INFO - 16:58:14: AerodynamicsScenario
INFO - 16:58:14: Disciplines: SobieskiAerodynamics
INFO - 16:58:14: MDO formulation: DisciplinaryOpt
INFO - 16:58:14: Optimization problem:
INFO - 16:58:14: minimize -y_24(x_2) = -y_24(x_2)
INFO - 16:58:14: with respect to x_2
INFO - 16:58:14: subject to constraints:
INFO - 16:58:14: g_2(x_2) <= 0.0
INFO - 16:58:14: over the design space:
INFO - 16:58:14: +------+-------------+-------+-------------+-------+
INFO - 16:58:14: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:14: +------+-------------+-------+-------------+-------+
INFO - 16:58:14: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:14: +------+-------------+-------+-------------+-------+
INFO - 16:58:14: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:14: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:14:
INFO - 16:58:14: ... 3%|▎ | 1/30 [00:00<00:00, 1162.18 it/sec, obj=-6.85]
INFO - 16:58:14:
INFO - 16:58:14:
INFO - 16:58:14: Optimization result:
INFO - 16:58:14: Optimizer info:
INFO - 16:58:14: Status: 8
INFO - 16:58:14: Message: Positive directional derivative for linesearch
INFO - 16:58:14: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:14: Solution:
INFO - 16:58:14: The solution is feasible.
INFO - 16:58:14: Objective: -6.849108827175748
INFO - 16:58:14: Standardized constraints:
INFO - 16:58:14: g_2 = -0.0002509034806748023
INFO - 16:58:14: Design space:
INFO - 16:58:14: +------+-------------+-------+-------------+-------+
INFO - 16:58:14: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:14: +------+-------------+-------+-------------+-------+
INFO - 16:58:14: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:14: +------+-------------+-------+-------------+-------+
INFO - 16:58:14: *** End AerodynamicsScenario execution (time: 0:00:00.006747) ***
INFO - 16:58:14:
INFO - 16:58:14: *** Start StructureScenario execution ***
INFO - 16:58:14: StructureScenario
INFO - 16:58:14: Disciplines: SobieskiStructure
INFO - 16:58:14: MDO formulation: DisciplinaryOpt
INFO - 16:58:14: Optimization problem:
INFO - 16:58:14: minimize -y_11(x_1) = -y_11(x_1)
INFO - 16:58:14: with respect to x_1
INFO - 16:58:14: subject to constraints:
INFO - 16:58:14: g_1(x_1) <= 0.0
INFO - 16:58:14: over the design space:
INFO - 16:58:14: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:14: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:14: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:14: | x_1[0] | 0.1 | 0.2159238934745972 | 0.4 | float |
INFO - 16:58:14: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:14: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:14: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:14: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:14:
INFO - 16:58:14: ... 3%|▎ | 1/30 [00:00<00:00, 648.87 it/sec, obj=-.493]
INFO - 16:58:14:
INFO - 16:58:14: ... 7%|▋ | 2/30 [00:00<00:00, 275.61 it/sec, obj=-.493]
INFO - 16:58:14:
INFO - 16:58:14: ... 10%|█ | 3/30 [00:00<00:00, 248.64 it/sec, obj=-.493]
INFO - 16:58:14:
INFO - 16:58:14: ... 13%|█▎ | 4/30 [00:00<00:00, 229.01 it/sec, obj=-.493]
INFO - 16:58:14:
INFO - 16:58:14: ... 17%|█▋ | 5/30 [00:00<00:00, 218.67 it/sec, obj=-.493]
INFO - 16:58:14:
INFO - 16:58:14:
INFO - 16:58:14: Optimization result:
INFO - 16:58:14: Optimizer info:
INFO - 16:58:14: Status: None
INFO - 16:58:14: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:58:14: Number of calls to the objective function by the optimizer: 6
INFO - 16:58:14: Solution:
INFO - 16:58:14: The solution is feasible.
INFO - 16:58:14: Objective: -0.49295218931941787
INFO - 16:58:14: Standardized constraints:
INFO - 16:58:14: g_1 = [-1.84297022e-14 -1.03526140e-02 -2.28966907e-02 -3.27808231e-02
INFO - 16:58:14: -4.03526140e-02 -1.88331350e-01 -5.16686504e-02]
INFO - 16:58:14: Design space:
INFO - 16:58:14: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:14: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:14: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:14: | x_1[0] | 0.1 | 0.189516666085516 | 0.4 | float |
INFO - 16:58:14: | x_1[1] | 0.75 | 0.7500000000000001 | 1.25 | float |
INFO - 16:58:14: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:14: *** End StructureScenario execution (time: 0:00:00.027142) ***
WARNING - 16:58:14: MDAJacobi has reached its maximum number of iterations but the normed residual 2.6870836615612218e-14 is still above the tolerance 1e-14.
INFO - 16:58:14: ... 36%|███▌ | 18/50 [00:04<00:07, 4.24 it/sec, obj=-2.9e+3]
INFO - 16:58:14:
INFO - 16:58:14: *** Start PropulsionScenario execution ***
INFO - 16:58:14: PropulsionScenario
INFO - 16:58:14: Disciplines: SobieskiPropulsion
INFO - 16:58:14: MDO formulation: DisciplinaryOpt
INFO - 16:58:14: Optimization problem:
INFO - 16:58:14: minimize y_34(x_3)
INFO - 16:58:14: with respect to x_3
INFO - 16:58:14: subject to constraints:
INFO - 16:58:14: g_3(x_3) <= 0.0
INFO - 16:58:14: over the design space:
INFO - 16:58:14: +------+-------------+-------------------+-------------+-------+
INFO - 16:58:14: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:14: +------+-------------+-------------------+-------------+-------+
INFO - 16:58:14: | x_3 | 0.1 | 0.160716994553237 | 1 | float |
INFO - 16:58:14: +------+-------------+-------------------+-------------+-------+
INFO - 16:58:14: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:14: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:14:
INFO - 16:58:14: ... 3%|▎ | 1/30 [00:00<00:00, 1218.21 it/sec, obj=0.948]
INFO - 16:58:14:
INFO - 16:58:14: ... 7%|▋ | 2/30 [00:00<00:00, 492.17 it/sec, obj=0.948]
INFO - 16:58:14:
INFO - 16:58:14: ... 10%|█ | 3/30 [00:00<00:00, 446.66 it/sec, obj=0.948]
INFO - 16:58:14:
INFO - 16:58:14: ... 13%|█▎ | 4/30 [00:00<00:00, 373.63 it/sec, obj=0.948]
INFO - 16:58:14:
INFO - 16:58:14:
INFO - 16:58:14: Optimization result:
INFO - 16:58:14: Optimizer info:
INFO - 16:58:14: Status: None
INFO - 16:58:14: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:58:14: Number of calls to the objective function by the optimizer: 5
INFO - 16:58:14: Solution:
INFO - 16:58:14: The solution is feasible.
INFO - 16:58:14: Objective: 0.9475403871824581
INFO - 16:58:14: Standardized constraints:
INFO - 16:58:14: g_3 = [-7.83206352e-01 -2.16793648e-01 2.22044605e-16 -1.79680696e-01]
INFO - 16:58:14: Design space:
INFO - 16:58:14: +------+-------------+-------------------+-------------+-------+
INFO - 16:58:14: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:14: +------+-------------+-------------------+-------------+-------+
INFO - 16:58:14: | x_3 | 0.1 | 0.160832403474291 | 1 | float |
INFO - 16:58:14: +------+-------------+-------------------+-------------+-------+
INFO - 16:58:14: *** End PropulsionScenario execution (time: 0:00:00.014474) ***
INFO - 16:58:14:
INFO - 16:58:14: *** Start AerodynamicsScenario execution ***
INFO - 16:58:14: AerodynamicsScenario
INFO - 16:58:14: Disciplines: SobieskiAerodynamics
INFO - 16:58:14: MDO formulation: DisciplinaryOpt
INFO - 16:58:14: Optimization problem:
INFO - 16:58:14: minimize -y_24(x_2) = -y_24(x_2)
INFO - 16:58:14: with respect to x_2
INFO - 16:58:14: subject to constraints:
INFO - 16:58:14: g_2(x_2) <= 0.0
INFO - 16:58:14: over the design space:
INFO - 16:58:14: +------+-------------+-------+-------------+-------+
INFO - 16:58:14: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:14: +------+-------------+-------+-------------+-------+
INFO - 16:58:14: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:14: +------+-------------+-------+-------------+-------+
INFO - 16:58:14: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:14: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:14:
INFO - 16:58:14: ... 3%|▎ | 1/30 [00:00<00:00, 1163.47 it/sec, obj=-6.77]
INFO - 16:58:14:
INFO - 16:58:14:
INFO - 16:58:14: Optimization result:
INFO - 16:58:14: Optimizer info:
INFO - 16:58:14: Status: 8
INFO - 16:58:14: Message: Positive directional derivative for linesearch
INFO - 16:58:14: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:14: Solution:
INFO - 16:58:14: The solution is feasible.
INFO - 16:58:14: Objective: -6.772234701934653
INFO - 16:58:14: Standardized constraints:
INFO - 16:58:14: g_2 = -0.013757491615793205
INFO - 16:58:14: Design space:
INFO - 16:58:14: +------+-------------+-------+-------------+-------+
INFO - 16:58:14: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:14: +------+-------------+-------+-------------+-------+
INFO - 16:58:14: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:14: +------+-------------+-------+-------------+-------+
INFO - 16:58:14: *** End AerodynamicsScenario execution (time: 0:00:00.006769) ***
INFO - 16:58:14:
INFO - 16:58:14: *** Start StructureScenario execution ***
INFO - 16:58:14: StructureScenario
INFO - 16:58:14: Disciplines: SobieskiStructure
INFO - 16:58:14: MDO formulation: DisciplinaryOpt
INFO - 16:58:14: Optimization problem:
INFO - 16:58:14: minimize -y_11(x_1) = -y_11(x_1)
INFO - 16:58:14: with respect to x_1
INFO - 16:58:14: subject to constraints:
INFO - 16:58:14: g_1(x_1) <= 0.0
INFO - 16:58:14: over the design space:
INFO - 16:58:14: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:14: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:14: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:14: | x_1[0] | 0.1 | 0.189516666085516 | 0.4 | float |
INFO - 16:58:14: | x_1[1] | 0.75 | 0.7500000000000001 | 1.25 | float |
INFO - 16:58:14: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:14: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:14: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:14:
INFO - 16:58:14: ... 3%|▎ | 1/30 [00:00<00:00, 658.14 it/sec, obj=-.478]
INFO - 16:58:14:
INFO - 16:58:14: ... 7%|▋ | 2/30 [00:00<00:00, 274.15 it/sec, obj=-.333]
INFO - 16:58:14:
INFO - 16:58:14: ... 10%|█ | 3/30 [00:00<00:00, 247.42 it/sec, obj=-.356]
INFO - 16:58:14:
INFO - 16:58:14: ... 13%|█▎ | 4/30 [00:00<00:00, 225.94 it/sec, obj=-.357]
INFO - 16:58:14:
INFO - 16:58:14: ... 17%|█▋ | 5/30 [00:00<00:00, 216.35 it/sec, obj=-.357]
INFO - 16:58:14:
INFO - 16:58:14: ... 20%|██ | 6/30 [00:00<00:00, 211.85 it/sec, obj=-.357]
INFO - 16:58:14:
INFO - 16:58:14: ... 23%|██▎ | 7/30 [00:00<00:00, 207.37 it/sec, obj=-.357]
INFO - 16:58:14:
INFO - 16:58:14:
INFO - 16:58:14: Optimization result:
INFO - 16:58:14: Optimizer info:
INFO - 16:58:14: Status: None
INFO - 16:58:14: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:58:14: Number of calls to the objective function by the optimizer: 8
INFO - 16:58:14: Solution:
INFO - 16:58:14: The solution is feasible.
INFO - 16:58:14: Objective: -0.3566887689932508
INFO - 16:58:14: Standardized constraints:
INFO - 16:58:14: g_1 = [ 0. -0.01845845 -0.03201576 -0.04153513 -0.04845845 -0.14436508
INFO - 16:58:14: -0.09563492]
INFO - 16:58:14: Design space:
INFO - 16:58:14: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:14: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:14: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:14: | x_1[0] | 0.1 | 0.1 | 0.4 | float |
INFO - 16:58:14: | x_1[1] | 0.75 | 0.8345012031736465 | 1.25 | float |
INFO - 16:58:14: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:14: *** End StructureScenario execution (time: 0:00:00.038059) ***
INFO - 16:58:14: ... 38%|███▊ | 19/50 [00:04<00:07, 4.29 it/sec, obj=-2.64e+3]
INFO - 16:58:14:
INFO - 16:58:14: *** Start PropulsionScenario execution ***
INFO - 16:58:14: PropulsionScenario
INFO - 16:58:14: Disciplines: SobieskiPropulsion
INFO - 16:58:14: MDO formulation: DisciplinaryOpt
INFO - 16:58:14: Optimization problem:
INFO - 16:58:14: minimize y_34(x_3)
INFO - 16:58:14: with respect to x_3
INFO - 16:58:14: subject to constraints:
INFO - 16:58:14: g_3(x_3) <= 0.0
INFO - 16:58:14: over the design space:
INFO - 16:58:14: +------+-------------+-------------------+-------------+-------+
INFO - 16:58:14: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:14: +------+-------------+-------------------+-------------+-------+
INFO - 16:58:14: | x_3 | 0.1 | 0.160832403474291 | 1 | float |
INFO - 16:58:14: +------+-------------+-------------------+-------------+-------+
INFO - 16:58:14: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:14: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:14:
INFO - 16:58:14: ... 3%|▎ | 1/30 [00:00<00:00, 1790.91 it/sec, obj=0.934]
INFO - 16:58:14:
INFO - 16:58:14: ... 7%|▋ | 2/30 [00:00<00:00, 518.01 it/sec, obj=0.935]
INFO - 16:58:14:
INFO - 16:58:14: ... 10%|█ | 3/30 [00:00<00:00, 556.79 it/sec, obj=0.934]
INFO - 16:58:14:
INFO - 16:58:14: ... 13%|█▎ | 4/30 [00:00<00:00, 484.37 it/sec, obj=0.935]
INFO - 16:58:14:
INFO - 16:58:14: ... 17%|█▋ | 5/30 [00:00<00:00, 444.47 it/sec, obj=0.935]
INFO - 16:58:14:
INFO - 16:58:14:
INFO - 16:58:14: Optimization result:
INFO - 16:58:14: Optimizer info:
INFO - 16:58:14: Status: 8
INFO - 16:58:14: Message: Positive directional derivative for linesearch
INFO - 16:58:14: Number of calls to the objective function by the optimizer: 8
INFO - 16:58:14: Solution:
INFO - 16:58:14: The solution is feasible.
INFO - 16:58:14: Objective: 0.9348661185646842
INFO - 16:58:14: Standardized constraints:
INFO - 16:58:14: g_3 = [-7.62921086e-01 -2.37078914e-01 -6.66133815e-16 -1.82983808e-01]
INFO - 16:58:14: Design space:
INFO - 16:58:14: +------+-------------+-------------------+-------------+-------+
INFO - 16:58:14: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:14: +------+-------------+-------------------+-------------+-------+
INFO - 16:58:14: | x_3 | 0.1 | 0.159525504894589 | 1 | float |
INFO - 16:58:14: +------+-------------+-------------------+-------------+-------+
INFO - 16:58:14: *** End PropulsionScenario execution (time: 0:00:00.020903) ***
INFO - 16:58:14:
INFO - 16:58:14: *** Start AerodynamicsScenario execution ***
INFO - 16:58:14: AerodynamicsScenario
INFO - 16:58:14: Disciplines: SobieskiAerodynamics
INFO - 16:58:14: MDO formulation: DisciplinaryOpt
INFO - 16:58:14: Optimization problem:
INFO - 16:58:14: minimize -y_24(x_2) = -y_24(x_2)
INFO - 16:58:14: with respect to x_2
INFO - 16:58:14: subject to constraints:
INFO - 16:58:14: g_2(x_2) <= 0.0
INFO - 16:58:14: over the design space:
INFO - 16:58:14: +------+-------------+-------+-------------+-------+
INFO - 16:58:14: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:14: +------+-------------+-------+-------------+-------+
INFO - 16:58:14: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:14: +------+-------------+-------+-------------+-------+
INFO - 16:58:14: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:14: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:14:
INFO - 16:58:14: ... 3%|▎ | 1/30 [00:00<00:00, 1003.18 it/sec, obj=-8.52]
INFO - 16:58:14:
INFO - 16:58:14:
INFO - 16:58:14: Optimization result:
INFO - 16:58:14: Optimizer info:
INFO - 16:58:14: Status: 8
INFO - 16:58:14: Message: Positive directional derivative for linesearch
INFO - 16:58:14: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:14: Solution:
INFO - 16:58:14: The solution is feasible.
INFO - 16:58:14: Objective: -8.51857320236685
INFO - 16:58:14: Standardized constraints:
INFO - 16:58:14: g_2 = 0.0
INFO - 16:58:14: Design space:
INFO - 16:58:14: +------+-------------+-------+-------------+-------+
INFO - 16:58:14: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:14: +------+-------------+-------+-------------+-------+
INFO - 16:58:14: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:14: +------+-------------+-------+-------------+-------+
INFO - 16:58:14: *** End AerodynamicsScenario execution (time: 0:00:00.006762) ***
INFO - 16:58:14:
INFO - 16:58:14: *** Start StructureScenario execution ***
INFO - 16:58:14: StructureScenario
INFO - 16:58:14: Disciplines: SobieskiStructure
INFO - 16:58:14: MDO formulation: DisciplinaryOpt
INFO - 16:58:14: Optimization problem:
INFO - 16:58:14: minimize -y_11(x_1) = -y_11(x_1)
INFO - 16:58:14: with respect to x_1
INFO - 16:58:14: subject to constraints:
INFO - 16:58:14: g_1(x_1) <= 0.0
INFO - 16:58:14: over the design space:
INFO - 16:58:14: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:14: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:14: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:14: | x_1[0] | 0.1 | 0.1 | 0.4 | float |
INFO - 16:58:14: | x_1[1] | 0.75 | 0.8345012031736465 | 1.25 | float |
INFO - 16:58:14: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:14: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:14: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:14:
INFO - 16:58:14: ... 3%|▎ | 1/30 [00:00<00:00, 698.93 it/sec, obj=-.366]
INFO - 16:58:14:
INFO - 16:58:14: ... 7%|▋ | 2/30 [00:00<00:00, 281.53 it/sec, obj=-.516]
INFO - 16:58:14:
INFO - 16:58:14: ... 10%|█ | 3/30 [00:00<00:00, 249.85 it/sec, obj=-.516]
INFO - 16:58:14:
INFO - 16:58:14: ... 13%|█▎ | 4/30 [00:00<00:00, 232.09 it/sec, obj=-.516]
INFO - 16:58:14:
INFO - 16:58:14: ... 17%|█▋ | 5/30 [00:00<00:00, 222.51 it/sec, obj=-.517]
INFO - 16:58:14:
INFO - 16:58:14: ... 20%|██ | 6/30 [00:00<00:00, 214.45 it/sec, obj=-.517]
INFO - 16:58:14:
INFO - 16:58:14: ... 23%|██▎ | 7/30 [00:00<00:00, 211.06 it/sec, obj=-.517]
INFO - 16:58:14:
INFO - 16:58:14: ... 27%|██▋ | 8/30 [00:00<00:00, 208.11 it/sec, obj=-.517]
INFO - 16:58:14:
INFO - 16:58:14:
INFO - 16:58:14: Optimization result:
INFO - 16:58:14: Optimizer info:
INFO - 16:58:14: Status: None
INFO - 16:58:14: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:58:14: Number of calls to the objective function by the optimizer: 9
INFO - 16:58:14: Solution:
INFO - 16:58:14: The solution is feasible.
INFO - 16:58:14: Objective: -0.5171484917446126
INFO - 16:58:14: Standardized constraints:
INFO - 16:58:14: g_1 = [-6.76569911e-13 -8.23626024e-03 -2.05157928e-02 -3.04951611e-02
INFO - 16:58:14: -3.82362602e-02 -1.97828091e-01 -4.21719094e-02]
INFO - 16:58:14: Design space:
INFO - 16:58:14: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:14: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:14: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:14: | x_1[0] | 0.1 | 0.1511058871421416 | 0.4 | float |
INFO - 16:58:14: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:14: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:14: *** End StructureScenario execution (time: 0:00:00.042963) ***
INFO - 16:58:14: ... 40%|████ | 20/50 [00:04<00:06, 4.34 it/sec, obj=-2.85e+3]
INFO - 16:58:15:
INFO - 16:58:15: *** Start PropulsionScenario execution ***
INFO - 16:58:15: PropulsionScenario
INFO - 16:58:15: Disciplines: SobieskiPropulsion
INFO - 16:58:15: MDO formulation: DisciplinaryOpt
INFO - 16:58:15: Optimization problem:
INFO - 16:58:15: minimize y_34(x_3)
INFO - 16:58:15: with respect to x_3
INFO - 16:58:15: subject to constraints:
INFO - 16:58:15: g_3(x_3) <= 0.0
INFO - 16:58:15: over the design space:
INFO - 16:58:15: +------+-------------+-------------------+-------------+-------+
INFO - 16:58:15: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:15: +------+-------------+-------------------+-------------+-------+
INFO - 16:58:15: | x_3 | 0.1 | 0.159525504894589 | 1 | float |
INFO - 16:58:15: +------+-------------+-------------------+-------------+-------+
INFO - 16:58:15: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:15: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:15:
INFO - 16:58:15: ... 3%|▎ | 1/30 [00:00<00:00, 2239.35 it/sec, obj=0.944]
INFO - 16:58:15:
INFO - 16:58:15: ... 7%|▋ | 2/30 [00:00<00:00, 539.39 it/sec, obj=0.943]
INFO - 16:58:15:
INFO - 16:58:15: ... 10%|█ | 3/30 [00:00<00:00, 487.62 it/sec, obj=0.943]
INFO - 16:58:15:
INFO - 16:58:15: ... 13%|█▎ | 4/30 [00:00<00:00, 495.39 it/sec, obj=0.943]
INFO - 16:58:15:
INFO - 16:58:15:
INFO - 16:58:15: Optimization result:
INFO - 16:58:15: Optimizer info:
INFO - 16:58:15: Status: None
INFO - 16:58:15: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:58:15: Number of calls to the objective function by the optimizer: 5
INFO - 16:58:15: Solution:
INFO - 16:58:15: The solution is feasible.
INFO - 16:58:15: Objective: 0.9430046884743997
INFO - 16:58:15: Standardized constraints:
INFO - 16:58:15: g_3 = [-7.54056629e-01 -2.45943371e-01 2.22044605e-16 -1.81625786e-01]
INFO - 16:58:15: Design space:
INFO - 16:58:15: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:15: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:15: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:15: | x_3 | 0.1 | 0.1610610418777702 | 1 | float |
INFO - 16:58:15: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:15: *** End PropulsionScenario execution (time: 0:00:00.011852) ***
INFO - 16:58:15:
INFO - 16:58:15: *** Start AerodynamicsScenario execution ***
INFO - 16:58:15: AerodynamicsScenario
INFO - 16:58:15: Disciplines: SobieskiAerodynamics
INFO - 16:58:15: MDO formulation: DisciplinaryOpt
INFO - 16:58:15: Optimization problem:
INFO - 16:58:15: minimize -y_24(x_2) = -y_24(x_2)
INFO - 16:58:15: with respect to x_2
INFO - 16:58:15: subject to constraints:
INFO - 16:58:15: g_2(x_2) <= 0.0
INFO - 16:58:15: over the design space:
INFO - 16:58:15: +------+-------------+-------+-------------+-------+
INFO - 16:58:15: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:15: +------+-------------+-------+-------------+-------+
INFO - 16:58:15: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:15: +------+-------------+-------+-------------+-------+
INFO - 16:58:15: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:15: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:15:
INFO - 16:58:15: ... 3%|▎ | 1/30 [00:00<00:00, 1065.90 it/sec, obj=-6.7]
INFO - 16:58:15:
WARNING - 16:58:15: Optimization found no feasible point ! The least infeasible point is selected.
INFO - 16:58:15:
INFO - 16:58:15: Optimization result:
INFO - 16:58:15: Optimizer info:
INFO - 16:58:15: Status: 8
INFO - 16:58:15: Message: Positive directional derivative for linesearch
INFO - 16:58:15: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:15: Solution:
WARNING - 16:58:15: The solution is not feasible.
INFO - 16:58:15: Objective: -6.701306961720516
INFO - 16:58:15: Standardized constraints:
INFO - 16:58:15: g_2 = 0.0064464399398367345
INFO - 16:58:15: Design space:
INFO - 16:58:15: +------+-------------+-------+-------------+-------+
INFO - 16:58:15: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:15: +------+-------------+-------+-------------+-------+
INFO - 16:58:15: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:15: +------+-------------+-------+-------------+-------+
INFO - 16:58:15: *** End AerodynamicsScenario execution (time: 0:00:00.011759) ***
INFO - 16:58:15:
INFO - 16:58:15: *** Start StructureScenario execution ***
INFO - 16:58:15: StructureScenario
INFO - 16:58:15: Disciplines: SobieskiStructure
INFO - 16:58:15: MDO formulation: DisciplinaryOpt
INFO - 16:58:15: Optimization problem:
INFO - 16:58:15: minimize -y_11(x_1) = -y_11(x_1)
INFO - 16:58:15: with respect to x_1
INFO - 16:58:15: subject to constraints:
INFO - 16:58:15: g_1(x_1) <= 0.0
INFO - 16:58:15: over the design space:
INFO - 16:58:15: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:15: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:15: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:15: | x_1[0] | 0.1 | 0.1511058871421416 | 0.4 | float |
INFO - 16:58:15: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:15: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:15: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:15: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:15:
INFO - 16:58:15: ... 3%|▎ | 1/30 [00:00<00:00, 619.45 it/sec, obj=-.487]
INFO - 16:58:15:
INFO - 16:58:15: ... 7%|▋ | 2/30 [00:00<00:00, 277.63 it/sec, obj=-.487]
INFO - 16:58:15:
INFO - 16:58:15: ... 10%|█ | 3/30 [00:00<00:00, 249.32 it/sec, obj=-.487]
INFO - 16:58:15:
INFO - 16:58:15: ... 13%|█▎ | 4/30 [00:00<00:00, 230.47 it/sec, obj=-.487]
INFO - 16:58:15:
INFO - 16:58:15: ... 17%|█▋ | 5/30 [00:00<00:00, 219.55 it/sec, obj=-.489]
INFO - 16:58:15:
INFO - 16:58:15: ... 20%|██ | 6/30 [00:00<00:00, 214.44 it/sec, obj=-.489]
INFO - 16:58:15:
INFO - 16:58:15: ... 23%|██▎ | 7/30 [00:00<00:00, 210.12 it/sec, obj=-.489]
INFO - 16:58:15:
INFO - 16:58:15: ... 27%|██▋ | 8/30 [00:00<00:00, 206.89 it/sec, obj=-.489]
INFO - 16:58:15:
INFO - 16:58:15: ... 30%|███ | 9/30 [00:00<00:00, 205.16 it/sec, obj=-.489]
INFO - 16:58:15:
INFO - 16:58:15:
INFO - 16:58:15: Optimization result:
INFO - 16:58:15: Optimizer info:
INFO - 16:58:15: Status: None
INFO - 16:58:15: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:58:15: Number of calls to the objective function by the optimizer: 10
INFO - 16:58:15: Solution:
INFO - 16:58:15: The solution is feasible.
INFO - 16:58:15: Objective: -0.4892373999620035
INFO - 16:58:15: Standardized constraints:
INFO - 16:58:15: g_1 = [-1.60538249e-13 -3.63429331e-03 -1.53385800e-02 -2.55250368e-02
INFO - 16:58:15: -3.36342933e-02 -2.37344965e-01 -2.65503529e-03]
INFO - 16:58:15: Design space:
INFO - 16:58:15: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:15: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:15: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:15: | x_1[0] | 0.1 | 0.3267343980932806 | 0.4 | float |
INFO - 16:58:15: | x_1[1] | 0.75 | 0.750000000000002 | 1.25 | float |
INFO - 16:58:15: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:15: *** End StructureScenario execution (time: 0:00:00.048362) ***
INFO - 16:58:15: ... 42%|████▏ | 21/50 [00:04<00:06, 4.31 it/sec, obj=-2.8e+3]
INFO - 16:58:15:
INFO - 16:58:15: *** Start PropulsionScenario execution ***
INFO - 16:58:15: PropulsionScenario
INFO - 16:58:15: Disciplines: SobieskiPropulsion
INFO - 16:58:15: MDO formulation: DisciplinaryOpt
INFO - 16:58:15: Optimization problem:
INFO - 16:58:15: minimize y_34(x_3)
INFO - 16:58:15: with respect to x_3
INFO - 16:58:15: subject to constraints:
INFO - 16:58:15: g_3(x_3) <= 0.0
INFO - 16:58:15: over the design space:
INFO - 16:58:15: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:15: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:15: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:15: | x_3 | 0.1 | 0.1610610418777702 | 1 | float |
INFO - 16:58:15: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:15: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:15: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:15:
INFO - 16:58:15: ... 3%|▎ | 1/30 [00:00<00:00, 2003.97 it/sec, obj=0.922]
INFO - 16:58:15:
INFO - 16:58:15: ... 7%|▋ | 2/30 [00:00<00:00, 537.49 it/sec, obj=0.924]
INFO - 16:58:15:
INFO - 16:58:15: ... 10%|█ | 3/30 [00:00<00:00, 577.46 it/sec, obj=0.922]
INFO - 16:58:15:
INFO - 16:58:15: ... 13%|█▎ | 4/30 [00:00<00:00, 491.22 it/sec, obj=0.924]
INFO - 16:58:15:
INFO - 16:58:15:
INFO - 16:58:15: Optimization result:
INFO - 16:58:15: Optimizer info:
INFO - 16:58:15: Status: 8
INFO - 16:58:15: Message: Positive directional derivative for linesearch
INFO - 16:58:15: Number of calls to the objective function by the optimizer: 5
INFO - 16:58:15: Solution:
INFO - 16:58:15: The solution is feasible.
INFO - 16:58:15: Objective: 0.9239330847904544
INFO - 16:58:15: Standardized constraints:
INFO - 16:58:15: g_3 = [-7.67167990e-01 -2.32832010e-01 -1.22124533e-15 -1.83255000e-01]
INFO - 16:58:15: Design space:
INFO - 16:58:15: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:15: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:15: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:15: | x_3 | 0.1 | 0.1562447456462873 | 1 | float |
INFO - 16:58:15: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:15: *** End PropulsionScenario execution (time: 0:00:00.013706) ***
INFO - 16:58:15:
INFO - 16:58:15: *** Start AerodynamicsScenario execution ***
INFO - 16:58:15: AerodynamicsScenario
INFO - 16:58:15: Disciplines: SobieskiAerodynamics
INFO - 16:58:15: MDO formulation: DisciplinaryOpt
INFO - 16:58:15: Optimization problem:
INFO - 16:58:15: minimize -y_24(x_2) = -y_24(x_2)
INFO - 16:58:15: with respect to x_2
INFO - 16:58:15: subject to constraints:
INFO - 16:58:15: g_2(x_2) <= 0.0
INFO - 16:58:15: over the design space:
INFO - 16:58:15: +------+-------------+-------+-------------+-------+
INFO - 16:58:15: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:15: +------+-------------+-------+-------------+-------+
INFO - 16:58:15: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:15: +------+-------------+-------+-------------+-------+
INFO - 16:58:15: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:15: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:15:
INFO - 16:58:15: ... 3%|▎ | 1/30 [00:00<00:00, 1165.08 it/sec, obj=-7.19]
INFO - 16:58:15:
INFO - 16:58:15:
INFO - 16:58:15: Optimization result:
INFO - 16:58:15: Optimizer info:
INFO - 16:58:15: Status: 8
INFO - 16:58:15: Message: Positive directional derivative for linesearch
INFO - 16:58:15: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:15: Solution:
INFO - 16:58:15: The solution is feasible.
INFO - 16:58:15: Objective: -7.19164531799294
INFO - 16:58:15: Standardized constraints:
INFO - 16:58:15: g_2 = -2.220446049250313e-16
INFO - 16:58:15: Design space:
INFO - 16:58:15: +------+-------------+-------+-------------+-------+
INFO - 16:58:15: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:15: +------+-------------+-------+-------------+-------+
INFO - 16:58:15: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:15: +------+-------------+-------+-------------+-------+
INFO - 16:58:15: *** End AerodynamicsScenario execution (time: 0:00:00.006727) ***
INFO - 16:58:15:
INFO - 16:58:15: *** Start StructureScenario execution ***
INFO - 16:58:15: StructureScenario
INFO - 16:58:15: Disciplines: SobieskiStructure
INFO - 16:58:15: MDO formulation: DisciplinaryOpt
INFO - 16:58:15: Optimization problem:
INFO - 16:58:15: minimize -y_11(x_1) = -y_11(x_1)
INFO - 16:58:15: with respect to x_1
INFO - 16:58:15: subject to constraints:
INFO - 16:58:15: g_1(x_1) <= 0.0
INFO - 16:58:15: over the design space:
INFO - 16:58:15: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:15: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:15: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:15: | x_1[0] | 0.1 | 0.3267343980932806 | 0.4 | float |
INFO - 16:58:15: | x_1[1] | 0.75 | 0.750000000000002 | 1.25 | float |
INFO - 16:58:15: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:15: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:15: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:15:
INFO - 16:58:15: ... 3%|▎ | 1/30 [00:00<00:00, 613.02 it/sec, obj=-.513]
INFO - 16:58:15:
INFO - 16:58:15: ... 7%|▋ | 2/30 [00:00<00:00, 278.40 it/sec, obj=-.501]
INFO - 16:58:15:
INFO - 16:58:15: ... 10%|█ | 3/30 [00:00<00:00, 244.89 it/sec, obj=-.512]
INFO - 16:58:15:
INFO - 16:58:15: ... 13%|█▎ | 4/30 [00:00<00:00, 225.82 it/sec, obj=-.512]
INFO - 16:58:15:
INFO - 16:58:15: ... 17%|█▋ | 5/30 [00:00<00:00, 215.97 it/sec, obj=-.512]
INFO - 16:58:15:
INFO - 16:58:15: ... 20%|██ | 6/30 [00:00<00:00, 209.62 it/sec, obj=-.512]
INFO - 16:58:15:
INFO - 16:58:15:
INFO - 16:58:15: Optimization result:
INFO - 16:58:15: Optimizer info:
INFO - 16:58:15: Status: None
INFO - 16:58:15: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:58:15: Number of calls to the objective function by the optimizer: 7
INFO - 16:58:15: Solution:
INFO - 16:58:15: The solution is feasible.
INFO - 16:58:15: Objective: -0.5120098372521849
INFO - 16:58:15: Standardized constraints:
INFO - 16:58:15: g_1 = [-1.11022302e-15 -1.24928205e-02 -2.53044230e-02 -3.50922461e-02
INFO - 16:58:15: -4.24928205e-02 -1.80808885e-01 -5.91911152e-02]
INFO - 16:58:15: Design space:
INFO - 16:58:15: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:15: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:15: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:15: | x_1[0] | 0.1 | 0.2499419068992361 | 0.4 | float |
INFO - 16:58:15: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:15: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:15: *** End StructureScenario execution (time: 0:00:00.033019) ***
INFO - 16:58:15: ... 44%|████▍ | 22/50 [00:05<00:06, 4.35 it/sec, obj=-3.23e+3]
INFO - 16:58:15:
INFO - 16:58:15: *** Start PropulsionScenario execution ***
INFO - 16:58:15: PropulsionScenario
INFO - 16:58:15: Disciplines: SobieskiPropulsion
INFO - 16:58:15: MDO formulation: DisciplinaryOpt
INFO - 16:58:15: Optimization problem:
INFO - 16:58:15: minimize y_34(x_3)
INFO - 16:58:15: with respect to x_3
INFO - 16:58:15: subject to constraints:
INFO - 16:58:15: g_3(x_3) <= 0.0
INFO - 16:58:15: over the design space:
INFO - 16:58:15: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:15: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:15: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:15: | x_3 | 0.1 | 0.1562447456462873 | 1 | float |
INFO - 16:58:15: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:15: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:15: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:15:
INFO - 16:58:15: ... 3%|▎ | 1/30 [00:00<00:00, 2269.65 it/sec, obj=0.924]
INFO - 16:58:15:
INFO - 16:58:15: ... 7%|▋ | 2/30 [00:00<00:00, 530.52 it/sec, obj=0.924]
INFO - 16:58:15:
INFO - 16:58:15: ... 10%|█ | 3/30 [00:00<00:00, 584.08 it/sec, obj=0.924]
INFO - 16:58:15:
INFO - 16:58:15:
INFO - 16:58:15: Optimization result:
INFO - 16:58:15: Optimizer info:
INFO - 16:58:15: Status: None
INFO - 16:58:15: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:58:15: Number of calls to the objective function by the optimizer: 4
INFO - 16:58:15: Solution:
INFO - 16:58:15: The solution is feasible.
INFO - 16:58:15: Objective: 0.9239330847904544
INFO - 16:58:15: Standardized constraints:
INFO - 16:58:15: g_3 = [-7.92181212e-01 -2.07818788e-01 -1.22124533e-15 -1.83255000e-01]
INFO - 16:58:15: Design space:
INFO - 16:58:15: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:15: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:15: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:15: | x_3 | 0.1 | 0.1562447456462873 | 1 | float |
INFO - 16:58:15: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:15: *** End PropulsionScenario execution (time: 0:00:00.008965) ***
INFO - 16:58:15:
INFO - 16:58:15: *** Start AerodynamicsScenario execution ***
INFO - 16:58:15: AerodynamicsScenario
INFO - 16:58:15: Disciplines: SobieskiAerodynamics
INFO - 16:58:15: MDO formulation: DisciplinaryOpt
INFO - 16:58:15: Optimization problem:
INFO - 16:58:15: minimize -y_24(x_2) = -y_24(x_2)
INFO - 16:58:15: with respect to x_2
INFO - 16:58:15: subject to constraints:
INFO - 16:58:15: g_2(x_2) <= 0.0
INFO - 16:58:15: over the design space:
INFO - 16:58:15: +------+-------------+-------+-------------+-------+
INFO - 16:58:15: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:15: +------+-------------+-------+-------------+-------+
INFO - 16:58:15: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:15: +------+-------------+-------+-------------+-------+
INFO - 16:58:15: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:15: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:15:
INFO - 16:58:15: ... 3%|▎ | 1/30 [00:00<00:00, 985.04 it/sec, obj=-7.5]
INFO - 16:58:15:
INFO - 16:58:15:
INFO - 16:58:15: Optimization result:
INFO - 16:58:15: Optimizer info:
INFO - 16:58:15: Status: 8
INFO - 16:58:15: Message: Positive directional derivative for linesearch
INFO - 16:58:15: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:15: Solution:
INFO - 16:58:15: The solution is feasible.
INFO - 16:58:15: Objective: -7.496353394266239
INFO - 16:58:15: Standardized constraints:
INFO - 16:58:15: g_2 = 2.220446049250313e-16
INFO - 16:58:15: Design space:
INFO - 16:58:15: +------+-------------+-------+-------------+-------+
INFO - 16:58:15: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:15: +------+-------------+-------+-------------+-------+
INFO - 16:58:15: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:15: +------+-------------+-------+-------------+-------+
INFO - 16:58:15: *** End AerodynamicsScenario execution (time: 0:00:00.006814) ***
INFO - 16:58:15:
INFO - 16:58:15: *** Start StructureScenario execution ***
INFO - 16:58:15: StructureScenario
INFO - 16:58:15: Disciplines: SobieskiStructure
INFO - 16:58:15: MDO formulation: DisciplinaryOpt
INFO - 16:58:15: Optimization problem:
INFO - 16:58:15: minimize -y_11(x_1) = -y_11(x_1)
INFO - 16:58:15: with respect to x_1
INFO - 16:58:15: subject to constraints:
INFO - 16:58:15: g_1(x_1) <= 0.0
INFO - 16:58:15: over the design space:
INFO - 16:58:15: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:15: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:15: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:15: | x_1[0] | 0.1 | 0.2499419068992361 | 0.4 | float |
INFO - 16:58:15: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:15: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:15: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:15: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:15:
INFO - 16:58:15: ... 3%|▎ | 1/30 [00:00<00:00, 678.03 it/sec, obj=-.502]
INFO - 16:58:15:
INFO - 16:58:15: ... 7%|▋ | 2/30 [00:00<00:00, 264.28 it/sec, obj=-.502]
INFO - 16:58:15:
INFO - 16:58:15: ... 10%|█ | 3/30 [00:00<00:00, 231.79 it/sec, obj=-.502]
INFO - 16:58:15:
INFO - 16:58:15: ... 13%|█▎ | 4/30 [00:00<00:00, 217.04 it/sec, obj=-.502]
INFO - 16:58:15:
INFO - 16:58:15: ... 17%|█▋ | 5/30 [00:00<00:00, 205.39 it/sec, obj=-.502]
INFO - 16:58:15:
INFO - 16:58:15: ... 20%|██ | 6/30 [00:00<00:00, 197.71 it/sec, obj=-.502]
INFO - 16:58:15:
INFO - 16:58:15: ... 23%|██▎ | 7/30 [00:00<00:00, 194.52 it/sec, obj=-.502]
INFO - 16:58:15:
INFO - 16:58:15:
INFO - 16:58:15: Optimization result:
INFO - 16:58:15: Optimizer info:
INFO - 16:58:15: Status: 8
INFO - 16:58:15: Message: Positive directional derivative for linesearch
INFO - 16:58:15: Number of calls to the objective function by the optimizer: 8
INFO - 16:58:15: Solution:
INFO - 16:58:15: The solution is feasible.
INFO - 16:58:15: Objective: -0.5023359821419833
INFO - 16:58:15: Standardized constraints:
INFO - 16:58:15: g_1 = [ 1.11022302e-15 -1.46422303e-02 -2.77225090e-02 -3.74136087e-02
INFO - 16:58:15: -4.46422303e-02 -1.73043586e-01 -6.69564140e-02]
INFO - 16:58:15: Design space:
INFO - 16:58:15: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:15: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:15: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:15: | x_1[0] | 0.1 | 0.3065919694766578 | 0.4 | float |
INFO - 16:58:15: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:15: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:15: *** End StructureScenario execution (time: 0:00:00.043660) ***
WARNING - 16:58:15: MDAJacobi has reached its maximum number of iterations but the normed residual 2.6870836615612218e-14 is still above the tolerance 1e-14.
INFO - 16:58:15: ... 46%|████▌ | 23/50 [00:05<00:06, 4.35 it/sec, obj=-3.27e+3]
INFO - 16:58:15:
INFO - 16:58:15: *** Start PropulsionScenario execution ***
INFO - 16:58:15: PropulsionScenario
INFO - 16:58:15: Disciplines: SobieskiPropulsion
INFO - 16:58:15: MDO formulation: DisciplinaryOpt
INFO - 16:58:15: Optimization problem:
INFO - 16:58:15: minimize y_34(x_3)
INFO - 16:58:15: with respect to x_3
INFO - 16:58:15: subject to constraints:
INFO - 16:58:15: g_3(x_3) <= 0.0
INFO - 16:58:15: over the design space:
INFO - 16:58:15: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:15: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:15: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:15: | x_3 | 0.1 | 0.1562447456462873 | 1 | float |
INFO - 16:58:15: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:15: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:15: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:15:
INFO - 16:58:15: ... 3%|▎ | 1/30 [00:00<00:00, 2274.57 it/sec, obj=0.924]
INFO - 16:58:15:
INFO - 16:58:15: ... 7%|▋ | 2/30 [00:00<00:00, 529.45 it/sec, obj=0.924]
INFO - 16:58:15:
INFO - 16:58:15: ... 10%|█ | 3/30 [00:00<00:00, 594.29 it/sec, obj=0.924]
INFO - 16:58:15:
INFO - 16:58:15:
INFO - 16:58:15: Optimization result:
INFO - 16:58:15: Optimizer info:
INFO - 16:58:15: Status: None
INFO - 16:58:15: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:58:15: Number of calls to the objective function by the optimizer: 4
INFO - 16:58:15: Solution:
INFO - 16:58:15: The solution is feasible.
INFO - 16:58:15: Objective: 0.9239330847904544
INFO - 16:58:15: Standardized constraints:
INFO - 16:58:15: g_3 = [-7.91630901e-01 -2.08369099e-01 -1.22124533e-15 -1.83255000e-01]
INFO - 16:58:15: Design space:
INFO - 16:58:15: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:15: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:15: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:15: | x_3 | 0.1 | 0.1562447456462873 | 1 | float |
INFO - 16:58:15: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:15: *** End PropulsionScenario execution (time: 0:00:00.008863) ***
INFO - 16:58:15:
INFO - 16:58:15: *** Start AerodynamicsScenario execution ***
INFO - 16:58:15: AerodynamicsScenario
INFO - 16:58:15: Disciplines: SobieskiAerodynamics
INFO - 16:58:15: MDO formulation: DisciplinaryOpt
INFO - 16:58:15: Optimization problem:
INFO - 16:58:15: minimize -y_24(x_2) = -y_24(x_2)
INFO - 16:58:15: with respect to x_2
INFO - 16:58:15: subject to constraints:
INFO - 16:58:15: g_2(x_2) <= 0.0
INFO - 16:58:15: over the design space:
INFO - 16:58:15: +------+-------------+-------+-------------+-------+
INFO - 16:58:15: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:15: +------+-------------+-------+-------------+-------+
INFO - 16:58:15: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:15: +------+-------------+-------+-------------+-------+
INFO - 16:58:15: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:15: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:15:
INFO - 16:58:15: ... 3%|▎ | 1/30 [00:00<00:00, 1164.44 it/sec, obj=-7.48]
INFO - 16:58:15:
INFO - 16:58:15:
INFO - 16:58:15: Optimization result:
INFO - 16:58:15: Optimizer info:
INFO - 16:58:15: Status: 8
INFO - 16:58:15: Message: Positive directional derivative for linesearch
INFO - 16:58:15: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:15: Solution:
INFO - 16:58:15: The solution is feasible.
INFO - 16:58:15: Objective: -7.48367182330332
INFO - 16:58:15: Standardized constraints:
INFO - 16:58:15: g_2 = 2.220446049250313e-16
INFO - 16:58:15: Design space:
INFO - 16:58:15: +------+-------------+-------+-------------+-------+
INFO - 16:58:15: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:15: +------+-------------+-------+-------------+-------+
INFO - 16:58:15: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:15: +------+-------------+-------+-------------+-------+
INFO - 16:58:15: *** End AerodynamicsScenario execution (time: 0:00:00.007238) ***
INFO - 16:58:15:
INFO - 16:58:15: *** Start StructureScenario execution ***
INFO - 16:58:15: StructureScenario
INFO - 16:58:15: Disciplines: SobieskiStructure
INFO - 16:58:15: MDO formulation: DisciplinaryOpt
INFO - 16:58:15: Optimization problem:
INFO - 16:58:15: minimize -y_11(x_1) = -y_11(x_1)
INFO - 16:58:15: with respect to x_1
INFO - 16:58:15: subject to constraints:
INFO - 16:58:15: g_1(x_1) <= 0.0
INFO - 16:58:15: over the design space:
INFO - 16:58:15: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:15: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:15: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:15: | x_1[0] | 0.1 | 0.3065919694766578 | 0.4 | float |
INFO - 16:58:15: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:15: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:15: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:15: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:15:
INFO - 16:58:15: ... 3%|▎ | 1/30 [00:00<00:00, 653.62 it/sec, obj=-.502]
INFO - 16:58:15:
INFO - 16:58:15: ... 7%|▋ | 2/30 [00:00<00:00, 257.73 it/sec, obj=-.502]
INFO - 16:58:15:
INFO - 16:58:15: ... 10%|█ | 3/30 [00:00<00:00, 228.86 it/sec, obj=-.502]
INFO - 16:58:15:
INFO - 16:58:15: ... 13%|█▎ | 4/30 [00:00<00:00, 217.54 it/sec, obj=-.502]
INFO - 16:58:15:
INFO - 16:58:15:
INFO - 16:58:15: Optimization result:
INFO - 16:58:15: Optimizer info:
INFO - 16:58:15: Status: None
INFO - 16:58:15: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:58:15: Number of calls to the objective function by the optimizer: 5
INFO - 16:58:15: Solution:
INFO - 16:58:15: The solution is feasible.
INFO - 16:58:15: Objective: -0.502454090551291
INFO - 16:58:15: Standardized constraints:
INFO - 16:58:15: g_1 = [-2.06501483e-13 -1.45984600e-02 -2.76732675e-02 -3.73663368e-02
INFO - 16:58:15: -4.45984600e-02 -1.73196170e-01 -6.68038301e-02]
INFO - 16:58:15: Design space:
INFO - 16:58:15: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:15: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:15: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:15: | x_1[0] | 0.1 | 0.3053871830574576 | 0.4 | float |
INFO - 16:58:15: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:15: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:15: *** End StructureScenario execution (time: 0:00:00.023014) ***
INFO - 16:58:15: ... 48%|████▊ | 24/50 [00:05<00:05, 4.40 it/sec, obj=-3.27e+3]
INFO - 16:58:15:
INFO - 16:58:15: *** Start PropulsionScenario execution ***
INFO - 16:58:15: PropulsionScenario
INFO - 16:58:15: Disciplines: SobieskiPropulsion
INFO - 16:58:15: MDO formulation: DisciplinaryOpt
INFO - 16:58:15: Optimization problem:
INFO - 16:58:15: minimize y_34(x_3)
INFO - 16:58:15: with respect to x_3
INFO - 16:58:15: subject to constraints:
INFO - 16:58:15: g_3(x_3) <= 0.0
INFO - 16:58:15: over the design space:
INFO - 16:58:15: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:15: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:15: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:15: | x_3 | 0.1 | 0.1562447456462873 | 1 | float |
INFO - 16:58:15: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:15: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:15: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:15:
INFO - 16:58:15: ... 3%|▎ | 1/30 [00:00<00:00, 2265.97 it/sec, obj=0.924]
INFO - 16:58:15:
INFO - 16:58:15: ... 7%|▋ | 2/30 [00:00<00:00, 530.72 it/sec, obj=0.924]
INFO - 16:58:15:
INFO - 16:58:15: ... 10%|█ | 3/30 [00:00<00:00, 477.77 it/sec, obj=0.924]
INFO - 16:58:15:
INFO - 16:58:15: ... 13%|█▎ | 4/30 [00:00<00:00, 436.96 it/sec, obj=0.924]
INFO - 16:58:15:
INFO - 16:58:15:
INFO - 16:58:15: Optimization result:
INFO - 16:58:15: Optimizer info:
INFO - 16:58:15: Status: None
INFO - 16:58:15: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:58:15: Number of calls to the objective function by the optimizer: 5
INFO - 16:58:15: Solution:
INFO - 16:58:15: The solution is feasible.
INFO - 16:58:15: Objective: 0.9241584093216563
INFO - 16:58:15: Standardized constraints:
INFO - 16:58:15: g_3 = [-0.75572861 -0.24427139 0. -0.18325042]
INFO - 16:58:15: Design space:
INFO - 16:58:15: +------+-------------+-------------------+-------------+-------+
INFO - 16:58:15: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:15: +------+-------------+-------------------+-------------+-------+
INFO - 16:58:15: | x_3 | 0.1 | 0.156309789497642 | 1 | float |
INFO - 16:58:15: +------+-------------+-------------------+-------------+-------+
INFO - 16:58:15: *** End PropulsionScenario execution (time: 0:00:00.013093) ***
INFO - 16:58:15:
INFO - 16:58:15: *** Start AerodynamicsScenario execution ***
INFO - 16:58:15: AerodynamicsScenario
INFO - 16:58:15: Disciplines: SobieskiAerodynamics
INFO - 16:58:15: MDO formulation: DisciplinaryOpt
INFO - 16:58:15: Optimization problem:
INFO - 16:58:15: minimize -y_24(x_2) = -y_24(x_2)
INFO - 16:58:15: with respect to x_2
INFO - 16:58:15: subject to constraints:
INFO - 16:58:15: g_2(x_2) <= 0.0
INFO - 16:58:15: over the design space:
INFO - 16:58:15: +------+-------------+-------+-------------+-------+
INFO - 16:58:15: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:15: +------+-------------+-------+-------------+-------+
INFO - 16:58:15: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:15: +------+-------------+-------+-------------+-------+
INFO - 16:58:15: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:15: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:15:
INFO - 16:58:15: ... 3%|▎ | 1/30 [00:00<00:00, 1011.65 it/sec, obj=-7.2]
INFO - 16:58:15:
INFO - 16:58:15:
INFO - 16:58:15: Optimization result:
INFO - 16:58:15: Optimizer info:
INFO - 16:58:15: Status: 8
INFO - 16:58:15: Message: Positive directional derivative for linesearch
INFO - 16:58:15: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:15: Solution:
INFO - 16:58:15: The solution is feasible.
INFO - 16:58:15: Objective: -7.202291034639196
INFO - 16:58:15: Standardized constraints:
INFO - 16:58:15: g_2 = -8.556448256324956e-05
INFO - 16:58:15: Design space:
INFO - 16:58:15: +------+-------------+-------+-------------+-------+
INFO - 16:58:15: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:15: +------+-------------+-------+-------------+-------+
INFO - 16:58:15: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:15: +------+-------------+-------+-------------+-------+
INFO - 16:58:15: *** End AerodynamicsScenario execution (time: 0:00:00.006729) ***
INFO - 16:58:15:
INFO - 16:58:15: *** Start StructureScenario execution ***
INFO - 16:58:15: StructureScenario
INFO - 16:58:15: Disciplines: SobieskiStructure
INFO - 16:58:15: MDO formulation: DisciplinaryOpt
INFO - 16:58:15: Optimization problem:
INFO - 16:58:15: minimize -y_11(x_1) = -y_11(x_1)
INFO - 16:58:15: with respect to x_1
INFO - 16:58:15: subject to constraints:
INFO - 16:58:15: g_1(x_1) <= 0.0
INFO - 16:58:15: over the design space:
INFO - 16:58:15: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:15: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:15: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:15: | x_1[0] | 0.1 | 0.3053871830574576 | 0.4 | float |
INFO - 16:58:15: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:15: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:15: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:15: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:15:
INFO - 16:58:15: ... 3%|▎ | 1/30 [00:00<00:00, 700.69 it/sec, obj=-.506]
INFO - 16:58:15:
INFO - 16:58:15: ... 7%|▋ | 2/30 [00:00<00:00, 267.87 it/sec, obj=-.505]
INFO - 16:58:15:
INFO - 16:58:15: ... 10%|█ | 3/30 [00:00<00:00, 241.81 it/sec, obj=-.506]
INFO - 16:58:15:
INFO - 16:58:15: ... 13%|█▎ | 4/30 [00:00<00:00, 226.16 it/sec, obj=-.506]
INFO - 16:58:15:
INFO - 16:58:15: ... 17%|█▋ | 5/30 [00:00<00:00, 215.67 it/sec, obj=-.506]
INFO - 16:58:15:
INFO - 16:58:15:
INFO - 16:58:15: Optimization result:
INFO - 16:58:15: Optimizer info:
INFO - 16:58:15: Status: None
INFO - 16:58:15: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:58:15: Number of calls to the objective function by the optimizer: 6
INFO - 16:58:15: Solution:
INFO - 16:58:15: The solution is feasible.
INFO - 16:58:15: Objective: -0.5055130728283475
INFO - 16:58:15: Standardized constraints:
INFO - 16:58:15: g_1 = [-5.80935300e-12 -1.25319253e-02 -2.53484160e-02 -3.51344794e-02
INFO - 16:58:15: -4.25319253e-02 -1.80390557e-01 -5.96094427e-02]
INFO - 16:58:15: Design space:
INFO - 16:58:15: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:15: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:15: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:15: | x_1[0] | 0.1 | 0.2481650445585877 | 0.4 | float |
INFO - 16:58:15: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:15: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:15: *** End StructureScenario execution (time: 0:00:00.027743) ***
INFO - 16:58:15: ... 50%|█████ | 25/50 [00:05<00:05, 4.44 it/sec, obj=-3.16e+3]
WARNING - 16:58:16: MDAJacobi has reached its maximum number of iterations but the normed residual 1.7359275648513364e-14 is still above the tolerance 1e-14.
INFO - 16:58:16:
INFO - 16:58:16: *** Start PropulsionScenario execution ***
INFO - 16:58:16: PropulsionScenario
INFO - 16:58:16: Disciplines: SobieskiPropulsion
INFO - 16:58:16: MDO formulation: DisciplinaryOpt
INFO - 16:58:16: Optimization problem:
INFO - 16:58:16: minimize y_34(x_3)
INFO - 16:58:16: with respect to x_3
INFO - 16:58:16: subject to constraints:
INFO - 16:58:16: g_3(x_3) <= 0.0
INFO - 16:58:16: over the design space:
INFO - 16:58:16: +------+-------------+-------------------+-------------+-------+
INFO - 16:58:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:16: +------+-------------+-------------------+-------------+-------+
INFO - 16:58:16: | x_3 | 0.1 | 0.156309789497642 | 1 | float |
INFO - 16:58:16: +------+-------------+-------------------+-------------+-------+
INFO - 16:58:16: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:16: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:16:
INFO - 16:58:16: ... 3%|▎ | 1/30 [00:00<00:00, 2251.37 it/sec, obj=0.939]
INFO - 16:58:16:
INFO - 16:58:16: ... 7%|▋ | 2/30 [00:00<00:00, 527.92 it/sec, obj=0.937]
INFO - 16:58:16:
INFO - 16:58:16: ... 10%|█ | 3/30 [00:00<00:00, 480.58 it/sec, obj=0.937]
INFO - 16:58:16:
INFO - 16:58:16:
INFO - 16:58:16: Optimization result:
INFO - 16:58:16: Optimizer info:
INFO - 16:58:16: Status: 8
INFO - 16:58:16: Message: Positive directional derivative for linesearch
INFO - 16:58:16: Number of calls to the objective function by the optimizer: 6
INFO - 16:58:16: Solution:
INFO - 16:58:16: The solution is feasible.
INFO - 16:58:16: Objective: 0.9368108809477518
INFO - 16:58:16: Standardized constraints:
INFO - 16:58:16: g_3 = [-0.76290772 -0.23709228 0. -0.18321206]
INFO - 16:58:16: Design space:
INFO - 16:58:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: | x_3 | 0.1 | 0.1604129201363134 | 1 | float |
INFO - 16:58:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: *** End PropulsionScenario execution (time: 0:00:00.015088) ***
INFO - 16:58:16:
INFO - 16:58:16: *** Start AerodynamicsScenario execution ***
INFO - 16:58:16: AerodynamicsScenario
INFO - 16:58:16: Disciplines: SobieskiAerodynamics
INFO - 16:58:16: MDO formulation: DisciplinaryOpt
INFO - 16:58:16: Optimization problem:
INFO - 16:58:16: minimize -y_24(x_2) = -y_24(x_2)
INFO - 16:58:16: with respect to x_2
INFO - 16:58:16: subject to constraints:
INFO - 16:58:16: g_2(x_2) <= 0.0
INFO - 16:58:16: over the design space:
INFO - 16:58:16: +------+-------------+-------+-------------+-------+
INFO - 16:58:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:16: +------+-------------+-------+-------------+-------+
INFO - 16:58:16: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:16: +------+-------------+-------+-------------+-------+
INFO - 16:58:16: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:16: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:16:
INFO - 16:58:16: ... 3%|▎ | 1/30 [00:00<00:00, 1083.80 it/sec, obj=-7.07]
INFO - 16:58:16:
INFO - 16:58:16:
INFO - 16:58:16: Optimization result:
INFO - 16:58:16: Optimizer info:
INFO - 16:58:16: Status: 8
INFO - 16:58:16: Message: Positive directional derivative for linesearch
INFO - 16:58:16: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:16: Solution:
INFO - 16:58:16: The solution is feasible.
INFO - 16:58:16: Objective: -7.073183802595779
INFO - 16:58:16: Standardized constraints:
INFO - 16:58:16: g_2 = -0.0002449726810522801
INFO - 16:58:16: Design space:
INFO - 16:58:16: +------+-------------+-------+-------------+-------+
INFO - 16:58:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:16: +------+-------------+-------+-------------+-------+
INFO - 16:58:16: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:16: +------+-------------+-------+-------------+-------+
INFO - 16:58:16: *** End AerodynamicsScenario execution (time: 0:00:00.006773) ***
INFO - 16:58:16:
INFO - 16:58:16: *** Start StructureScenario execution ***
INFO - 16:58:16: StructureScenario
INFO - 16:58:16: Disciplines: SobieskiStructure
INFO - 16:58:16: MDO formulation: DisciplinaryOpt
INFO - 16:58:16: Optimization problem:
INFO - 16:58:16: minimize -y_11(x_1) = -y_11(x_1)
INFO - 16:58:16: with respect to x_1
INFO - 16:58:16: subject to constraints:
INFO - 16:58:16: g_1(x_1) <= 0.0
INFO - 16:58:16: over the design space:
INFO - 16:58:16: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:16: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: | x_1[0] | 0.1 | 0.2481650445585877 | 0.4 | float |
INFO - 16:58:16: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:16: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:16: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:16:
INFO - 16:58:16: ... 3%|▎ | 1/30 [00:00<00:00, 679.46 it/sec, obj=-.512]
INFO - 16:58:16:
INFO - 16:58:16: ... 7%|▋ | 2/30 [00:00<00:00, 277.50 it/sec, obj=-.512]
INFO - 16:58:16:
INFO - 16:58:16: ... 10%|█ | 3/30 [00:00<00:00, 249.82 it/sec, obj=-.512]
INFO - 16:58:16:
INFO - 16:58:16: ... 13%|█▎ | 4/30 [00:00<00:00, 230.88 it/sec, obj=-.512]
INFO - 16:58:16:
INFO - 16:58:16:
INFO - 16:58:16: Optimization result:
INFO - 16:58:16: Optimizer info:
INFO - 16:58:16: Status: None
INFO - 16:58:16: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:58:16: Number of calls to the objective function by the optimizer: 5
INFO - 16:58:16: Solution:
INFO - 16:58:16: The solution is feasible.
INFO - 16:58:16: Objective: -0.5115835440999617
INFO - 16:58:16: Standardized constraints:
INFO - 16:58:16: g_1 = [-3.52207152e-12 -1.26424384e-02 -2.54727432e-02 -3.52538335e-02
INFO - 16:58:16: -4.26424384e-02 -1.79471492e-01 -6.05285079e-02]
INFO - 16:58:16: Design space:
INFO - 16:58:16: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:16: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: | x_1[0] | 0.1 | 0.2458558638028291 | 0.4 | float |
INFO - 16:58:16: | x_1[1] | 0.75 | 0.7500000000000003 | 1.25 | float |
INFO - 16:58:16: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: *** End StructureScenario execution (time: 0:00:00.021976) ***
INFO - 16:58:16: ... 52%|█████▏ | 26/50 [00:05<00:05, 4.44 it/sec, obj=-3.08e+3]
INFO - 16:58:16:
INFO - 16:58:16: *** Start PropulsionScenario execution ***
INFO - 16:58:16: PropulsionScenario
INFO - 16:58:16: Disciplines: SobieskiPropulsion
INFO - 16:58:16: MDO formulation: DisciplinaryOpt
INFO - 16:58:16: Optimization problem:
INFO - 16:58:16: minimize y_34(x_3)
INFO - 16:58:16: with respect to x_3
INFO - 16:58:16: subject to constraints:
INFO - 16:58:16: g_3(x_3) <= 0.0
INFO - 16:58:16: over the design space:
INFO - 16:58:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: | x_3 | 0.1 | 0.1604129201363134 | 1 | float |
INFO - 16:58:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:16: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:16:
INFO - 16:58:16: ... 3%|▎ | 1/30 [00:00<00:00, 2051.00 it/sec, obj=0.922]
INFO - 16:58:16:
INFO - 16:58:16: ... 7%|▋ | 2/30 [00:00<00:00, 539.95 it/sec, obj=0.924]
INFO - 16:58:16:
INFO - 16:58:16: ... 10%|█ | 3/30 [00:00<00:00, 591.39 it/sec, obj=0.922]
INFO - 16:58:16:
INFO - 16:58:16: ... 13%|█▎ | 4/30 [00:00<00:00, 492.51 it/sec, obj=0.924]
INFO - 16:58:16:
INFO - 16:58:16:
INFO - 16:58:16: Optimization result:
INFO - 16:58:16: Optimizer info:
INFO - 16:58:16: Status: 8
INFO - 16:58:16: Message: Positive directional derivative for linesearch
INFO - 16:58:16: Number of calls to the objective function by the optimizer: 8
INFO - 16:58:16: Solution:
INFO - 16:58:16: The solution is feasible.
INFO - 16:58:16: Objective: 0.9239330847904543
INFO - 16:58:16: Standardized constraints:
INFO - 16:58:16: g_3 = [-7.67273943e-01 -2.32726057e-01 -3.33066907e-16 -1.83255000e-01]
INFO - 16:58:16: Design space:
INFO - 16:58:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: | x_3 | 0.1 | 0.1562447456462874 | 1 | float |
INFO - 16:58:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: *** End PropulsionScenario execution (time: 0:00:00.014904) ***
INFO - 16:58:16:
INFO - 16:58:16: *** Start AerodynamicsScenario execution ***
INFO - 16:58:16: AerodynamicsScenario
INFO - 16:58:16: Disciplines: SobieskiAerodynamics
INFO - 16:58:16: MDO formulation: DisciplinaryOpt
INFO - 16:58:16: Optimization problem:
INFO - 16:58:16: minimize -y_24(x_2) = -y_24(x_2)
INFO - 16:58:16: with respect to x_2
INFO - 16:58:16: subject to constraints:
INFO - 16:58:16: g_2(x_2) <= 0.0
INFO - 16:58:16: over the design space:
INFO - 16:58:16: +------+-------------+-------+-------------+-------+
INFO - 16:58:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:16: +------+-------------+-------+-------------+-------+
INFO - 16:58:16: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:16: +------+-------------+-------+-------------+-------+
INFO - 16:58:16: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:16: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:16:
INFO - 16:58:16: ... 3%|▎ | 1/30 [00:00<00:00, 1005.35 it/sec, obj=-7.41]
INFO - 16:58:16:
INFO - 16:58:16:
INFO - 16:58:16: Optimization result:
INFO - 16:58:16: Optimizer info:
INFO - 16:58:16: Status: 8
INFO - 16:58:16: Message: Positive directional derivative for linesearch
INFO - 16:58:16: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:16: Solution:
INFO - 16:58:16: The solution is feasible.
INFO - 16:58:16: Objective: -7.413475716602096
INFO - 16:58:16: Standardized constraints:
INFO - 16:58:16: g_2 = 2.220446049250313e-16
INFO - 16:58:16: Design space:
INFO - 16:58:16: +------+-------------+-------+-------------+-------+
INFO - 16:58:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:16: +------+-------------+-------+-------------+-------+
INFO - 16:58:16: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:16: +------+-------------+-------+-------------+-------+
INFO - 16:58:16: *** End AerodynamicsScenario execution (time: 0:00:00.011863) ***
INFO - 16:58:16:
INFO - 16:58:16: *** Start StructureScenario execution ***
INFO - 16:58:16: StructureScenario
INFO - 16:58:16: Disciplines: SobieskiStructure
INFO - 16:58:16: MDO formulation: DisciplinaryOpt
INFO - 16:58:16: Optimization problem:
INFO - 16:58:16: minimize -y_11(x_1) = -y_11(x_1)
INFO - 16:58:16: with respect to x_1
INFO - 16:58:16: subject to constraints:
INFO - 16:58:16: g_1(x_1) <= 0.0
INFO - 16:58:16: over the design space:
INFO - 16:58:16: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:16: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: | x_1[0] | 0.1 | 0.2458558638028291 | 0.4 | float |
INFO - 16:58:16: | x_1[1] | 0.75 | 0.7500000000000003 | 1.25 | float |
INFO - 16:58:16: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:16: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:16:
INFO - 16:58:16: ... 3%|▎ | 1/30 [00:00<00:00, 629.21 it/sec, obj=-.525]
INFO - 16:58:16:
INFO - 16:58:16: ... 7%|▋ | 2/30 [00:00<00:00, 278.73 it/sec, obj=-.525]
INFO - 16:58:16:
INFO - 16:58:16: ... 10%|█ | 3/30 [00:00<00:00, 250.49 it/sec, obj=-.525]
INFO - 16:58:16:
INFO - 16:58:16: ... 13%|█▎ | 4/30 [00:00<00:00, 230.88 it/sec, obj=-.525]
INFO - 16:58:16:
INFO - 16:58:16: ... 17%|█▋ | 5/30 [00:00<00:00, 220.90 it/sec, obj=-.525]
INFO - 16:58:16:
INFO - 16:58:16: ... 20%|██ | 6/30 [00:00<00:00, 215.11 it/sec, obj=-.526]
INFO - 16:58:16:
INFO - 16:58:16: ... 23%|██▎ | 7/30 [00:00<00:00, 210.78 it/sec, obj=-.526]
INFO - 16:58:16:
INFO - 16:58:16: ... 27%|██▋ | 8/30 [00:00<00:00, 207.50 it/sec, obj=-.526]
INFO - 16:58:16:
INFO - 16:58:16:
INFO - 16:58:16: Optimization result:
INFO - 16:58:16: Optimizer info:
INFO - 16:58:16: Status: None
INFO - 16:58:16: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:58:16: Number of calls to the objective function by the optimizer: 9
INFO - 16:58:16: Solution:
INFO - 16:58:16: The solution is feasible.
INFO - 16:58:16: Objective: -0.5255072985956551
INFO - 16:58:16: Standardized constraints:
INFO - 16:58:16: g_1 = [-1.95399252e-14 -1.48015200e-02 -2.79017100e-02 -3.75856416e-02
INFO - 16:58:16: -4.48015200e-02 -1.72490246e-01 -6.75097536e-02]
INFO - 16:58:16: Design space:
INFO - 16:58:16: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:16: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: | x_1[0] | 0.1 | 0.3109952891258821 | 0.4 | float |
INFO - 16:58:16: | x_1[1] | 0.75 | 0.7500000000000003 | 1.25 | float |
INFO - 16:58:16: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: *** End StructureScenario execution (time: 0:00:00.042792) ***
INFO - 16:58:16: ... 54%|█████▍ | 27/50 [00:06<00:05, 4.47 it/sec, obj=-3.4e+3]
INFO - 16:58:16:
INFO - 16:58:16: *** Start PropulsionScenario execution ***
INFO - 16:58:16: PropulsionScenario
INFO - 16:58:16: Disciplines: SobieskiPropulsion
INFO - 16:58:16: MDO formulation: DisciplinaryOpt
INFO - 16:58:16: Optimization problem:
INFO - 16:58:16: minimize y_34(x_3)
INFO - 16:58:16: with respect to x_3
INFO - 16:58:16: subject to constraints:
INFO - 16:58:16: g_3(x_3) <= 0.0
INFO - 16:58:16: over the design space:
INFO - 16:58:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: | x_3 | 0.1 | 0.1562447456462874 | 1 | float |
INFO - 16:58:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:16: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:16:
INFO - 16:58:16: ... 3%|▎ | 1/30 [00:00<00:00, 2283.24 it/sec, obj=0.924]
INFO - 16:58:16:
INFO - 16:58:16: ... 7%|▋ | 2/30 [00:00<00:00, 533.86 it/sec, obj=0.924]
INFO - 16:58:16:
INFO - 16:58:16:
INFO - 16:58:16: Optimization result:
INFO - 16:58:16: Optimizer info:
INFO - 16:58:16: Status: 8
INFO - 16:58:16: Message: Positive directional derivative for linesearch
INFO - 16:58:16: Number of calls to the objective function by the optimizer: 17
INFO - 16:58:16: Solution:
INFO - 16:58:16: The solution is feasible.
INFO - 16:58:16: Objective: 0.9239330847904543
INFO - 16:58:16: Standardized constraints:
INFO - 16:58:16: g_3 = [-7.76003751e-01 -2.23996249e-01 -3.33066907e-16 -1.83255000e-01]
INFO - 16:58:16: Design space:
INFO - 16:58:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: | x_3 | 0.1 | 0.1562447456462874 | 1 | float |
INFO - 16:58:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: *** End PropulsionScenario execution (time: 0:00:00.013624) ***
INFO - 16:58:16:
INFO - 16:58:16: *** Start AerodynamicsScenario execution ***
INFO - 16:58:16: AerodynamicsScenario
INFO - 16:58:16: Disciplines: SobieskiAerodynamics
INFO - 16:58:16: MDO formulation: DisciplinaryOpt
INFO - 16:58:16: Optimization problem:
INFO - 16:58:16: minimize -y_24(x_2) = -y_24(x_2)
INFO - 16:58:16: with respect to x_2
INFO - 16:58:16: subject to constraints:
INFO - 16:58:16: g_2(x_2) <= 0.0
INFO - 16:58:16: over the design space:
INFO - 16:58:16: +------+-------------+-------+-------------+-------+
INFO - 16:58:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:16: +------+-------------+-------+-------------+-------+
INFO - 16:58:16: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:16: +------+-------------+-------+-------------+-------+
INFO - 16:58:16: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:16: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:16:
INFO - 16:58:16: ... 3%|▎ | 1/30 [00:00<00:00, 1078.78 it/sec, obj=-7.68]
INFO - 16:58:16:
INFO - 16:58:16:
INFO - 16:58:16: Optimization result:
INFO - 16:58:16: Optimizer info:
INFO - 16:58:16: Status: 8
INFO - 16:58:16: Message: Positive directional derivative for linesearch
INFO - 16:58:16: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:16: Solution:
INFO - 16:58:16: The solution is feasible.
INFO - 16:58:16: Objective: -7.684839537184946
INFO - 16:58:16: Standardized constraints:
INFO - 16:58:16: g_2 = -0.004267271841467579
INFO - 16:58:16: Design space:
INFO - 16:58:16: +------+-------------+-------+-------------+-------+
INFO - 16:58:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:16: +------+-------------+-------+-------------+-------+
INFO - 16:58:16: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:16: +------+-------------+-------+-------------+-------+
INFO - 16:58:16: *** End AerodynamicsScenario execution (time: 0:00:00.006771) ***
INFO - 16:58:16:
INFO - 16:58:16: *** Start StructureScenario execution ***
INFO - 16:58:16: StructureScenario
INFO - 16:58:16: Disciplines: SobieskiStructure
INFO - 16:58:16: MDO formulation: DisciplinaryOpt
INFO - 16:58:16: Optimization problem:
INFO - 16:58:16: minimize -y_11(x_1) = -y_11(x_1)
INFO - 16:58:16: with respect to x_1
INFO - 16:58:16: subject to constraints:
INFO - 16:58:16: g_1(x_1) <= 0.0
INFO - 16:58:16: over the design space:
INFO - 16:58:16: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:16: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: | x_1[0] | 0.1 | 0.3109952891258821 | 0.4 | float |
INFO - 16:58:16: | x_1[1] | 0.75 | 0.7500000000000003 | 1.25 | float |
INFO - 16:58:16: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:16: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:16:
INFO - 16:58:16: ... 3%|▎ | 1/30 [00:00<00:00, 679.90 it/sec, obj=-.534]
INFO - 16:58:16:
INFO - 16:58:16: ... 7%|▋ | 2/30 [00:00<00:00, 277.02 it/sec, obj=-.534]
INFO - 16:58:16:
INFO - 16:58:16: ... 10%|█ | 3/30 [00:00<00:00, 248.41 it/sec, obj=-.534]
INFO - 16:58:16:
INFO - 16:58:16: ... 13%|█▎ | 4/30 [00:00<00:00, 227.97 it/sec, obj=-.534]
INFO - 16:58:16:
INFO - 16:58:16: ... 17%|█▋ | 5/30 [00:00<00:00, 217.80 it/sec, obj=-.534]
INFO - 16:58:16:
INFO - 16:58:16:
INFO - 16:58:16: Optimization result:
INFO - 16:58:16: Optimizer info:
INFO - 16:58:16: Status: None
INFO - 16:58:16: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:58:16: Number of calls to the objective function by the optimizer: 6
INFO - 16:58:16: Solution:
INFO - 16:58:16: The solution is feasible.
INFO - 16:58:16: Objective: -0.5337844078522624
INFO - 16:58:16: Standardized constraints:
INFO - 16:58:16: g_1 = [-2.22044605e-16 -1.76835810e-02 -3.11440286e-02 -4.06982675e-02
INFO - 16:58:16: -4.76835810e-02 -1.49548874e-01 -9.04511264e-02]
INFO - 16:58:16: Design space:
INFO - 16:58:16: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:16: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: | x_1[0] | 0.1 | 0.3041875603091873 | 0.4 | float |
INFO - 16:58:16: | x_1[1] | 0.75 | 0.7500000000000001 | 1.25 | float |
INFO - 16:58:16: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: *** End StructureScenario execution (time: 0:00:00.027196) ***
INFO - 16:58:16: ... 56%|█████▌ | 28/50 [00:06<00:04, 4.51 it/sec, obj=-3.56e+3]
INFO - 16:58:16:
INFO - 16:58:16: *** Start PropulsionScenario execution ***
INFO - 16:58:16: PropulsionScenario
INFO - 16:58:16: Disciplines: SobieskiPropulsion
INFO - 16:58:16: MDO formulation: DisciplinaryOpt
INFO - 16:58:16: Optimization problem:
INFO - 16:58:16: minimize y_34(x_3)
INFO - 16:58:16: with respect to x_3
INFO - 16:58:16: subject to constraints:
INFO - 16:58:16: g_3(x_3) <= 0.0
INFO - 16:58:16: over the design space:
INFO - 16:58:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: | x_3 | 0.1 | 0.1562447456462874 | 1 | float |
INFO - 16:58:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:16: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:16:
INFO - 16:58:16: ... 3%|▎ | 1/30 [00:00<00:00, 1272.93 it/sec, obj=0.924]
INFO - 16:58:16:
INFO - 16:58:16: ... 7%|▋ | 2/30 [00:00<00:00, 492.14 it/sec, obj=0.924]
INFO - 16:58:16:
INFO - 16:58:16:
INFO - 16:58:16: Optimization result:
INFO - 16:58:16: Optimizer info:
INFO - 16:58:16: Status: 8
INFO - 16:58:16: Message: Positive directional derivative for linesearch
INFO - 16:58:16: Number of calls to the objective function by the optimizer: 17
INFO - 16:58:16: Solution:
INFO - 16:58:16: The solution is feasible.
INFO - 16:58:16: Objective: 0.9239330847904543
INFO - 16:58:16: Standardized constraints:
INFO - 16:58:16: g_3 = [-7.79688816e-01 -2.20311184e-01 -3.33066907e-16 -1.83255000e-01]
INFO - 16:58:16: Design space:
INFO - 16:58:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: | x_3 | 0.1 | 0.1562447456462874 | 1 | float |
INFO - 16:58:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: *** End PropulsionScenario execution (time: 0:00:00.013888) ***
INFO - 16:58:16:
INFO - 16:58:16: *** Start AerodynamicsScenario execution ***
INFO - 16:58:16: AerodynamicsScenario
INFO - 16:58:16: Disciplines: SobieskiAerodynamics
INFO - 16:58:16: MDO formulation: DisciplinaryOpt
INFO - 16:58:16: Optimization problem:
INFO - 16:58:16: minimize -y_24(x_2) = -y_24(x_2)
INFO - 16:58:16: with respect to x_2
INFO - 16:58:16: subject to constraints:
INFO - 16:58:16: g_2(x_2) <= 0.0
INFO - 16:58:16: over the design space:
INFO - 16:58:16: +------+-------------+-------+-------------+-------+
INFO - 16:58:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:16: +------+-------------+-------+-------------+-------+
INFO - 16:58:16: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:16: +------+-------------+-------+-------------+-------+
INFO - 16:58:16: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:16: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:16:
INFO - 16:58:16: ... 3%|▎ | 1/30 [00:00<00:00, 1091.70 it/sec, obj=-7.96]
INFO - 16:58:16:
INFO - 16:58:16:
INFO - 16:58:16: Optimization result:
INFO - 16:58:16: Optimizer info:
INFO - 16:58:16: Status: 8
INFO - 16:58:16: Message: Positive directional derivative for linesearch
INFO - 16:58:16: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:16: Solution:
INFO - 16:58:16: The solution is feasible.
INFO - 16:58:16: Objective: -7.955608454390341
INFO - 16:58:16: Standardized constraints:
INFO - 16:58:16: g_2 = -0.006676938300852919
INFO - 16:58:16: Design space:
INFO - 16:58:16: +------+-------------+-------+-------------+-------+
INFO - 16:58:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:16: +------+-------------+-------+-------------+-------+
INFO - 16:58:16: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:16: +------+-------------+-------+-------------+-------+
INFO - 16:58:16: *** End AerodynamicsScenario execution (time: 0:00:00.006703) ***
INFO - 16:58:16:
INFO - 16:58:16: *** Start StructureScenario execution ***
INFO - 16:58:16: StructureScenario
INFO - 16:58:16: Disciplines: SobieskiStructure
INFO - 16:58:16: MDO formulation: DisciplinaryOpt
INFO - 16:58:16: Optimization problem:
INFO - 16:58:16: minimize -y_11(x_1) = -y_11(x_1)
INFO - 16:58:16: with respect to x_1
INFO - 16:58:16: subject to constraints:
INFO - 16:58:16: g_1(x_1) <= 0.0
INFO - 16:58:16: over the design space:
INFO - 16:58:16: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:16: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: | x_1[0] | 0.1 | 0.3041875603091873 | 0.4 | float |
INFO - 16:58:16: | x_1[1] | 0.75 | 0.7500000000000001 | 1.25 | float |
INFO - 16:58:16: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:16: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:16:
INFO - 16:58:16: ... 3%|▎ | 1/30 [00:00<00:00, 686.92 it/sec, obj=-.548]
INFO - 16:58:16:
INFO - 16:58:16: ... 7%|▋ | 2/30 [00:00<00:00, 284.02 it/sec, obj=-.548]
INFO - 16:58:16:
INFO - 16:58:16: ... 10%|█ | 3/30 [00:00<00:00, 250.47 it/sec, obj=-.548]
INFO - 16:58:16:
INFO - 16:58:16: ... 13%|█▎ | 4/30 [00:00<00:00, 232.43 it/sec, obj=-.548]
INFO - 16:58:16:
INFO - 16:58:16: ... 17%|█▋ | 5/30 [00:00<00:00, 223.13 it/sec, obj=-.549]
INFO - 16:58:16:
INFO - 16:58:16: ... 20%|██ | 6/30 [00:00<00:00, 216.08 it/sec, obj=-.549]
INFO - 16:58:16:
INFO - 16:58:16: ... 23%|██▎ | 7/30 [00:00<00:00, 212.06 it/sec, obj=-.549]
INFO - 16:58:16:
INFO - 16:58:16: ... 27%|██▋ | 8/30 [00:00<00:00, 208.99 it/sec, obj=-.549]
INFO - 16:58:16:
INFO - 16:58:16:
INFO - 16:58:16: Optimization result:
INFO - 16:58:16: Optimizer info:
INFO - 16:58:16: Status: None
INFO - 16:58:16: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:58:16: Number of calls to the objective function by the optimizer: 9
INFO - 16:58:16: Solution:
INFO - 16:58:16: The solution is feasible.
INFO - 16:58:16: Objective: -0.5485420243830186
INFO - 16:58:16: Standardized constraints:
INFO - 16:58:16: g_1 = [ 4.44089210e-16 -1.93328870e-02 -3.29994979e-02 -4.24795180e-02
INFO - 16:58:16: -4.93328870e-02 -1.37890054e-01 -1.02109946e-01]
INFO - 16:58:16: Design space:
INFO - 16:58:16: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:16: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: | x_1[0] | 0.1 | 0.3569479945607844 | 0.4 | float |
INFO - 16:58:16: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:16: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: *** End StructureScenario execution (time: 0:00:00.042773) ***
INFO - 16:58:16: ... 58%|█████▊ | 29/50 [00:06<00:04, 4.54 it/sec, obj=-3.79e+3]
INFO - 16:58:16:
INFO - 16:58:16: *** Start PropulsionScenario execution ***
INFO - 16:58:16: PropulsionScenario
INFO - 16:58:16: Disciplines: SobieskiPropulsion
INFO - 16:58:16: MDO formulation: DisciplinaryOpt
INFO - 16:58:16: Optimization problem:
INFO - 16:58:16: minimize y_34(x_3)
INFO - 16:58:16: with respect to x_3
INFO - 16:58:16: subject to constraints:
INFO - 16:58:16: g_3(x_3) <= 0.0
INFO - 16:58:16: over the design space:
INFO - 16:58:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: | x_3 | 0.1 | 0.1562447456462874 | 1 | float |
INFO - 16:58:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:16: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:16:
INFO - 16:58:16: ... 3%|▎ | 1/30 [00:00<00:00, 2277.04 it/sec, obj=0.924]
INFO - 16:58:16:
INFO - 16:58:16: ... 7%|▋ | 2/30 [00:00<00:00, 532.78 it/sec, obj=0.924]
INFO - 16:58:16:
INFO - 16:58:16:
INFO - 16:58:16: Optimization result:
INFO - 16:58:16: Optimizer info:
INFO - 16:58:16: Status: 8
INFO - 16:58:16: Message: Positive directional derivative for linesearch
INFO - 16:58:16: Number of calls to the objective function by the optimizer: 17
INFO - 16:58:16: Solution:
INFO - 16:58:16: The solution is feasible.
INFO - 16:58:16: Objective: 0.9239330847904543
INFO - 16:58:16: Standardized constraints:
INFO - 16:58:16: g_3 = [-7.66164559e-01 -2.33835441e-01 -3.33066907e-16 -1.83255000e-01]
INFO - 16:58:16: Design space:
INFO - 16:58:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: | x_3 | 0.1 | 0.1562447456462874 | 1 | float |
INFO - 16:58:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: *** End PropulsionScenario execution (time: 0:00:00.013656) ***
INFO - 16:58:16:
INFO - 16:58:16: *** Start AerodynamicsScenario execution ***
INFO - 16:58:16: AerodynamicsScenario
INFO - 16:58:16: Disciplines: SobieskiAerodynamics
INFO - 16:58:16: MDO formulation: DisciplinaryOpt
INFO - 16:58:16: Optimization problem:
INFO - 16:58:16: minimize -y_24(x_2) = -y_24(x_2)
INFO - 16:58:16: with respect to x_2
INFO - 16:58:16: subject to constraints:
INFO - 16:58:16: g_2(x_2) <= 0.0
INFO - 16:58:16: over the design space:
INFO - 16:58:16: +------+-------------+-------+-------------+-------+
INFO - 16:58:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:16: +------+-------------+-------+-------------+-------+
INFO - 16:58:16: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:16: +------+-------------+-------+-------------+-------+
INFO - 16:58:16: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:16: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:16:
INFO - 16:58:16: ... 3%|▎ | 1/30 [00:00<00:00, 1007.04 it/sec, obj=-7.78]
INFO - 16:58:16:
INFO - 16:58:16:
INFO - 16:58:16: Optimization result:
INFO - 16:58:16: Optimizer info:
INFO - 16:58:16: Status: 8
INFO - 16:58:16: Message: Positive directional derivative for linesearch
INFO - 16:58:16: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:16: Solution:
INFO - 16:58:16: The solution is feasible.
INFO - 16:58:16: Objective: -7.780698784730413
INFO - 16:58:16: Standardized constraints:
INFO - 16:58:16: g_2 = -0.0073611954029040305
INFO - 16:58:16: Design space:
INFO - 16:58:16: +------+-------------+-------+-------------+-------+
INFO - 16:58:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:16: +------+-------------+-------+-------------+-------+
INFO - 16:58:16: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:16: +------+-------------+-------+-------------+-------+
INFO - 16:58:16: *** End AerodynamicsScenario execution (time: 0:00:00.006867) ***
INFO - 16:58:16:
INFO - 16:58:16: *** Start StructureScenario execution ***
INFO - 16:58:16: StructureScenario
INFO - 16:58:16: Disciplines: SobieskiStructure
INFO - 16:58:16: MDO formulation: DisciplinaryOpt
INFO - 16:58:16: Optimization problem:
INFO - 16:58:16: minimize -y_11(x_1) = -y_11(x_1)
INFO - 16:58:16: with respect to x_1
INFO - 16:58:16: subject to constraints:
INFO - 16:58:16: g_1(x_1) <= 0.0
INFO - 16:58:16: over the design space:
INFO - 16:58:16: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:16: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: | x_1[0] | 0.1 | 0.3569479945607844 | 0.4 | float |
INFO - 16:58:16: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:16: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:16: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:16:
INFO - 16:58:16: ... 3%|▎ | 1/30 [00:00<00:00, 674.43 it/sec, obj=-.518]
INFO - 16:58:16:
INFO - 16:58:16: ... 7%|▋ | 2/30 [00:00<00:00, 277.94 it/sec, obj=-.518]
INFO - 16:58:16:
INFO - 16:58:16: ... 10%|█ | 3/30 [00:00<00:00, 246.97 it/sec, obj=-.518]
INFO - 16:58:16:
INFO - 16:58:16: ... 13%|█▎ | 4/30 [00:00<00:00, 228.17 it/sec, obj=-.518]
INFO - 16:58:16:
INFO - 16:58:16: ... 17%|█▋ | 5/30 [00:00<00:00, 218.15 it/sec, obj=-.518]
INFO - 16:58:16:
INFO - 16:58:16:
INFO - 16:58:16: Optimization result:
INFO - 16:58:16: Optimizer info:
INFO - 16:58:16: Status: None
INFO - 16:58:16: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:58:16: Number of calls to the objective function by the optimizer: 6
INFO - 16:58:16: Solution:
INFO - 16:58:16: The solution is feasible.
INFO - 16:58:16: Objective: -0.517749297783465
INFO - 16:58:16: Standardized constraints:
INFO - 16:58:16: g_1 = [-1.13242749e-13 -1.88059159e-02 -3.24066553e-02 -4.19103891e-02
INFO - 16:58:16: -4.88059159e-02 -1.37205681e-01 -1.02794319e-01]
INFO - 16:58:16: Design space:
INFO - 16:58:16: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:16: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: | x_1[0] | 0.1 | 0.3197897402509838 | 0.4 | float |
INFO - 16:58:16: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:16: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: *** End StructureScenario execution (time: 0:00:00.027130) ***
INFO - 16:58:16: ... 60%|██████ | 30/50 [00:06<00:04, 4.57 it/sec, obj=-3.5e+3]
INFO - 16:58:16:
INFO - 16:58:16: *** Start PropulsionScenario execution ***
INFO - 16:58:16: PropulsionScenario
INFO - 16:58:16: Disciplines: SobieskiPropulsion
INFO - 16:58:16: MDO formulation: DisciplinaryOpt
INFO - 16:58:16: Optimization problem:
INFO - 16:58:16: minimize y_34(x_3)
INFO - 16:58:16: with respect to x_3
INFO - 16:58:16: subject to constraints:
INFO - 16:58:16: g_3(x_3) <= 0.0
INFO - 16:58:16: over the design space:
INFO - 16:58:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: | x_3 | 0.1 | 0.1562447456462874 | 1 | float |
INFO - 16:58:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:16: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:16:
INFO - 16:58:16: ... 3%|▎ | 1/30 [00:00<00:00, 1219.98 it/sec, obj=0.926]
INFO - 16:58:16:
INFO - 16:58:16: ... 7%|▋ | 2/30 [00:00<00:00, 490.30 it/sec, obj=0.926]
INFO - 16:58:16:
INFO - 16:58:16: ... 10%|█ | 3/30 [00:00<00:00, 457.51 it/sec, obj=0.926]
INFO - 16:58:16:
INFO - 16:58:16: ... 13%|█▎ | 4/30 [00:00<00:00, 416.71 it/sec, obj=0.926]
INFO - 16:58:16:
INFO - 16:58:16:
INFO - 16:58:16: Optimization result:
INFO - 16:58:16: Optimizer info:
INFO - 16:58:16: Status: None
INFO - 16:58:16: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:58:16: Number of calls to the objective function by the optimizer: 5
INFO - 16:58:16: Solution:
INFO - 16:58:16: The solution is feasible.
INFO - 16:58:16: Objective: 0.9258719430468272
INFO - 16:58:16: Standardized constraints:
INFO - 16:58:16: g_3 = [-7.62453927e-01 -2.37546073e-01 -2.22044605e-16 -1.83169972e-01]
INFO - 16:58:16: Design space:
INFO - 16:58:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: | x_3 | 0.1 | 0.1567695606395582 | 1 | float |
INFO - 16:58:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: *** End PropulsionScenario execution (time: 0:00:00.013354) ***
INFO - 16:58:16:
INFO - 16:58:16: *** Start AerodynamicsScenario execution ***
INFO - 16:58:16: AerodynamicsScenario
INFO - 16:58:16: Disciplines: SobieskiAerodynamics
INFO - 16:58:16: MDO formulation: DisciplinaryOpt
INFO - 16:58:16: Optimization problem:
INFO - 16:58:16: minimize -y_24(x_2) = -y_24(x_2)
INFO - 16:58:16: with respect to x_2
INFO - 16:58:16: subject to constraints:
INFO - 16:58:16: g_2(x_2) <= 0.0
INFO - 16:58:16: over the design space:
INFO - 16:58:16: +------+-------------+-------+-------------+-------+
INFO - 16:58:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:16: +------+-------------+-------+-------------+-------+
INFO - 16:58:16: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:16: +------+-------------+-------+-------------+-------+
INFO - 16:58:16: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:16: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:16:
INFO - 16:58:16: ... 3%|▎ | 1/30 [00:00<00:00, 1171.27 it/sec, obj=-7.92]
INFO - 16:58:16:
WARNING - 16:58:16: Optimization found no feasible point ! The least infeasible point is selected.
INFO - 16:58:16:
INFO - 16:58:16: Optimization result:
INFO - 16:58:16: Optimizer info:
INFO - 16:58:16: Status: 8
INFO - 16:58:16: Message: Positive directional derivative for linesearch
INFO - 16:58:16: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:16: Solution:
WARNING - 16:58:16: The solution is not feasible.
INFO - 16:58:16: Objective: -7.9196867872798045
INFO - 16:58:16: Standardized constraints:
INFO - 16:58:16: g_2 = 0.002218232119894026
INFO - 16:58:16: Design space:
INFO - 16:58:16: +------+-------------+-------+-------------+-------+
INFO - 16:58:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:16: +------+-------------+-------+-------------+-------+
INFO - 16:58:16: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:16: +------+-------------+-------+-------------+-------+
INFO - 16:58:16: *** End AerodynamicsScenario execution (time: 0:00:00.006841) ***
INFO - 16:58:16:
INFO - 16:58:16: *** Start StructureScenario execution ***
INFO - 16:58:16: StructureScenario
INFO - 16:58:16: Disciplines: SobieskiStructure
INFO - 16:58:16: MDO formulation: DisciplinaryOpt
INFO - 16:58:16: Optimization problem:
INFO - 16:58:16: minimize -y_11(x_1) = -y_11(x_1)
INFO - 16:58:16: with respect to x_1
INFO - 16:58:16: subject to constraints:
INFO - 16:58:16: g_1(x_1) <= 0.0
INFO - 16:58:16: over the design space:
INFO - 16:58:16: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:16: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: | x_1[0] | 0.1 | 0.3197897402509838 | 0.4 | float |
INFO - 16:58:16: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:16: +--------+-------------+--------------------+-------------+-------+
INFO - 16:58:16: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:16: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:16:
INFO - 16:58:16: ... 3%|▎ | 1/30 [00:00<00:00, 666.29 it/sec, obj=-.558]
INFO - 16:58:16:
INFO - 16:58:16: ... 7%|▋ | 2/30 [00:00<00:00, 284.87 it/sec, obj=-.558]
INFO - 16:58:16:
INFO - 16:58:16: ... 10%|█ | 3/30 [00:00<00:00, 250.46 it/sec, obj=-.558]
INFO - 16:58:16:
INFO - 16:58:16: ... 13%|█▎ | 4/30 [00:00<00:00, 231.68 it/sec, obj=-.558]
INFO - 16:58:16:
INFO - 16:58:16: ... 17%|█▋ | 5/30 [00:00<00:00, 222.76 it/sec, obj=-.559]
INFO - 16:58:16:
INFO - 16:58:16:
INFO - 16:58:16: Optimization result:
INFO - 16:58:16: Optimizer info:
INFO - 16:58:16: Status: 8
INFO - 16:58:16: Message: Positive directional derivative for linesearch
INFO - 16:58:16: Number of calls to the objective function by the optimizer: 6
INFO - 16:58:16: Solution:
INFO - 16:58:16: The solution is feasible.
INFO - 16:58:16: Objective: -0.5590203992235109
INFO - 16:58:16: Standardized constraints:
INFO - 16:58:16: g_1 = [-0.01955246 -0.03338108 -0.0439156 -0.05139478 -0.05686359 -0.14537909
INFO - 16:58:16: -0.09462091]
INFO - 16:58:16: Design space:
INFO - 16:58:16: +--------+-------------+-------+-------------+-------+
INFO - 16:58:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:16: +--------+-------------+-------+-------------+-------+
INFO - 16:58:16: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:58:16: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:16: +--------+-------------+-------+-------------+-------+
INFO - 16:58:16: *** End StructureScenario execution (time: 0:00:00.030139) ***
INFO - 16:58:17: ... 62%|██████▏ | 31/50 [00:06<00:04, 4.61 it/sec, obj=-3.83e+3]
INFO - 16:58:17:
INFO - 16:58:17: *** Start PropulsionScenario execution ***
INFO - 16:58:17: PropulsionScenario
INFO - 16:58:17: Disciplines: SobieskiPropulsion
INFO - 16:58:17: MDO formulation: DisciplinaryOpt
INFO - 16:58:17: Optimization problem:
INFO - 16:58:17: minimize y_34(x_3)
INFO - 16:58:17: with respect to x_3
INFO - 16:58:17: subject to constraints:
INFO - 16:58:17: g_3(x_3) <= 0.0
INFO - 16:58:17: over the design space:
INFO - 16:58:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:17: | x_3 | 0.1 | 0.1567695606395582 | 1 | float |
INFO - 16:58:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:17: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:17: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:17:
INFO - 16:58:17: ... 3%|▎ | 1/30 [00:00<00:00, 2207.53 it/sec, obj=0.924]
INFO - 16:58:17:
INFO - 16:58:17: ... 7%|▋ | 2/30 [00:00<00:00, 529.85 it/sec, obj=0.924]
INFO - 16:58:17:
INFO - 16:58:17: ... 10%|█ | 3/30 [00:00<00:00, 586.70 it/sec, obj=0.924]
INFO - 16:58:17:
INFO - 16:58:17: ... 13%|█▎ | 4/30 [00:00<00:00, 493.97 it/sec, obj=0.924]
INFO - 16:58:17:
INFO - 16:58:17: ... 17%|█▋ | 5/30 [00:00<00:00, 449.91 it/sec, obj=0.924]
INFO - 16:58:17:
INFO - 16:58:17: ... 20%|██ | 6/30 [00:00<00:00, 392.36 it/sec, obj=0.924]
INFO - 16:58:17:
INFO - 16:58:17:
INFO - 16:58:17: Optimization result:
INFO - 16:58:17: Optimizer info:
INFO - 16:58:17: Status: None
INFO - 16:58:17: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:58:17: Number of calls to the objective function by the optimizer: 9
INFO - 16:58:17: Solution:
INFO - 16:58:17: The solution is feasible.
INFO - 16:58:17: Objective: 0.9239330847904542
INFO - 16:58:17: Standardized constraints:
INFO - 16:58:17: g_3 = [-7.95496730e-01 -2.04503270e-01 2.22044605e-16 -1.83255000e-01]
INFO - 16:58:17: Design space:
INFO - 16:58:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:17: | x_3 | 0.1 | 0.1562447456462875 | 1 | float |
INFO - 16:58:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:17: *** End PropulsionScenario execution (time: 0:00:00.019031) ***
INFO - 16:58:17:
INFO - 16:58:17: *** Start AerodynamicsScenario execution ***
INFO - 16:58:17: AerodynamicsScenario
INFO - 16:58:17: Disciplines: SobieskiAerodynamics
INFO - 16:58:17: MDO formulation: DisciplinaryOpt
INFO - 16:58:17: Optimization problem:
INFO - 16:58:17: minimize -y_24(x_2) = -y_24(x_2)
INFO - 16:58:17: with respect to x_2
INFO - 16:58:17: subject to constraints:
INFO - 16:58:17: g_2(x_2) <= 0.0
INFO - 16:58:17: over the design space:
INFO - 16:58:17: +------+-------------+-------+-------------+-------+
INFO - 16:58:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:17: +------+-------------+-------+-------------+-------+
INFO - 16:58:17: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:17: +------+-------------+-------+-------------+-------+
INFO - 16:58:17: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:17: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:17:
INFO - 16:58:17: ... 3%|▎ | 1/30 [00:00<00:00, 1126.29 it/sec, obj=-8.19]
INFO - 16:58:17:
INFO - 16:58:17:
INFO - 16:58:17: Optimization result:
INFO - 16:58:17: Optimizer info:
INFO - 16:58:17: Status: 8
INFO - 16:58:17: Message: Positive directional derivative for linesearch
INFO - 16:58:17: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:17: Solution:
INFO - 16:58:17: The solution is feasible.
INFO - 16:58:17: Objective: -8.187596956941483
INFO - 16:58:17: Standardized constraints:
INFO - 16:58:17: g_2 = -4.440892098500626e-16
INFO - 16:58:17: Design space:
INFO - 16:58:17: +------+-------------+-------+-------------+-------+
INFO - 16:58:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:17: +------+-------------+-------+-------------+-------+
INFO - 16:58:17: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:17: +------+-------------+-------+-------------+-------+
INFO - 16:58:17: *** End AerodynamicsScenario execution (time: 0:00:00.006698) ***
INFO - 16:58:17:
INFO - 16:58:17: *** Start StructureScenario execution ***
INFO - 16:58:17: StructureScenario
INFO - 16:58:17: Disciplines: SobieskiStructure
INFO - 16:58:17: MDO formulation: DisciplinaryOpt
INFO - 16:58:17: Optimization problem:
INFO - 16:58:17: minimize -y_11(x_1) = -y_11(x_1)
INFO - 16:58:17: with respect to x_1
INFO - 16:58:17: subject to constraints:
INFO - 16:58:17: g_1(x_1) <= 0.0
INFO - 16:58:17: over the design space:
INFO - 16:58:17: +--------+-------------+-------+-------------+-------+
INFO - 16:58:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:17: +--------+-------------+-------+-------------+-------+
INFO - 16:58:17: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:58:17: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:17: +--------+-------------+-------+-------------+-------+
INFO - 16:58:17: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:17: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:17:
INFO - 16:58:17: ... 3%|▎ | 1/30 [00:00<00:00, 698.35 it/sec, obj=-.544]
INFO - 16:58:17:
INFO - 16:58:17:
INFO - 16:58:17: Optimization result:
INFO - 16:58:17: Optimizer info:
INFO - 16:58:17: Status: 8
INFO - 16:58:17: Message: Positive directional derivative for linesearch
INFO - 16:58:17: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:17: Solution:
INFO - 16:58:17: The solution is feasible.
INFO - 16:58:17: Objective: -0.5439515138244272
INFO - 16:58:17: Standardized constraints:
INFO - 16:58:17: g_1 = [-0.02235499 -0.03704276 -0.04733436 -0.05445258 -0.0595911 -0.13141842
INFO - 16:58:17: -0.10858158]
INFO - 16:58:17: Design space:
INFO - 16:58:17: +--------+-------------+-------+-------------+-------+
INFO - 16:58:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:17: +--------+-------------+-------+-------------+-------+
INFO - 16:58:17: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:58:17: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:17: +--------+-------------+-------+-------------+-------+
INFO - 16:58:17: *** End StructureScenario execution (time: 0:00:00.009531) ***
INFO - 16:58:17: ... 64%|██████▍ | 32/50 [00:06<00:03, 4.66 it/sec, obj=-3.87e+3]
INFO - 16:58:17:
INFO - 16:58:17: *** Start PropulsionScenario execution ***
INFO - 16:58:17: PropulsionScenario
INFO - 16:58:17: Disciplines: SobieskiPropulsion
INFO - 16:58:17: MDO formulation: DisciplinaryOpt
INFO - 16:58:17: Optimization problem:
INFO - 16:58:17: minimize y_34(x_3)
INFO - 16:58:17: with respect to x_3
INFO - 16:58:17: subject to constraints:
INFO - 16:58:17: g_3(x_3) <= 0.0
INFO - 16:58:17: over the design space:
INFO - 16:58:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:17: | x_3 | 0.1 | 0.1562447456462875 | 1 | float |
INFO - 16:58:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:17: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:17: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:17:
INFO - 16:58:17: ... 3%|▎ | 1/30 [00:00<00:00, 2269.65 it/sec, obj=0.934]
INFO - 16:58:17:
INFO - 16:58:17: ... 7%|▋ | 2/30 [00:00<00:00, 531.53 it/sec, obj=0.933]
INFO - 16:58:17:
INFO - 16:58:17: ... 10%|█ | 3/30 [00:00<00:00, 476.41 it/sec, obj=0.933]
INFO - 16:58:17:
INFO - 16:58:17:
INFO - 16:58:17: Optimization result:
INFO - 16:58:17: Optimizer info:
INFO - 16:58:17: Status: 8
INFO - 16:58:17: Message: Positive directional derivative for linesearch
INFO - 16:58:17: Number of calls to the objective function by the optimizer: 4
INFO - 16:58:17: Solution:
INFO - 16:58:17: The solution is feasible.
INFO - 16:58:17: Objective: 0.9328767006688798
INFO - 16:58:17: Standardized constraints:
INFO - 16:58:17: g_3 = [-7.91919938e-01 -2.08080062e-01 8.88178420e-16 -1.81879937e-01]
INFO - 16:58:17: Design space:
INFO - 16:58:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:17: | x_3 | 0.1 | 0.1578632544864374 | 1 | float |
INFO - 16:58:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:17: *** End PropulsionScenario execution (time: 0:00:00.011847) ***
INFO - 16:58:17:
INFO - 16:58:17: *** Start AerodynamicsScenario execution ***
INFO - 16:58:17: AerodynamicsScenario
INFO - 16:58:17: Disciplines: SobieskiAerodynamics
INFO - 16:58:17: MDO formulation: DisciplinaryOpt
INFO - 16:58:17: Optimization problem:
INFO - 16:58:17: minimize -y_24(x_2) = -y_24(x_2)
INFO - 16:58:17: with respect to x_2
INFO - 16:58:17: subject to constraints:
INFO - 16:58:17: g_2(x_2) <= 0.0
INFO - 16:58:17: over the design space:
INFO - 16:58:17: +------+-------------+-------+-------------+-------+
INFO - 16:58:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:17: +------+-------------+-------+-------------+-------+
INFO - 16:58:17: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:17: +------+-------------+-------+-------------+-------+
INFO - 16:58:17: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:17: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:17:
INFO - 16:58:17: ... 3%|▎ | 1/30 [00:00<00:00, 1067.25 it/sec, obj=-8.09]
INFO - 16:58:17:
INFO - 16:58:17:
INFO - 16:58:17: Optimization result:
INFO - 16:58:17: Optimizer info:
INFO - 16:58:17: Status: 8
INFO - 16:58:17: Message: Positive directional derivative for linesearch
INFO - 16:58:17: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:17: Solution:
INFO - 16:58:17: The solution is feasible.
INFO - 16:58:17: Objective: -8.087402778714722
INFO - 16:58:17: Standardized constraints:
INFO - 16:58:17: g_2 = -0.00024967275312137716
INFO - 16:58:17: Design space:
INFO - 16:58:17: +------+-------------+-------+-------------+-------+
INFO - 16:58:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:17: +------+-------------+-------+-------------+-------+
INFO - 16:58:17: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:17: +------+-------------+-------+-------------+-------+
INFO - 16:58:17: *** End AerodynamicsScenario execution (time: 0:00:00.006712) ***
INFO - 16:58:17:
INFO - 16:58:17: *** Start StructureScenario execution ***
INFO - 16:58:17: StructureScenario
INFO - 16:58:17: Disciplines: SobieskiStructure
INFO - 16:58:17: MDO formulation: DisciplinaryOpt
INFO - 16:58:17: Optimization problem:
INFO - 16:58:17: minimize -y_11(x_1) = -y_11(x_1)
INFO - 16:58:17: with respect to x_1
INFO - 16:58:17: subject to constraints:
INFO - 16:58:17: g_1(x_1) <= 0.0
INFO - 16:58:17: over the design space:
INFO - 16:58:17: +--------+-------------+-------+-------------+-------+
INFO - 16:58:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:17: +--------+-------------+-------+-------------+-------+
INFO - 16:58:17: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:58:17: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:17: +--------+-------------+-------+-------------+-------+
INFO - 16:58:17: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:17: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:17:
INFO - 16:58:17: ... 3%|▎ | 1/30 [00:00<00:00, 698.93 it/sec, obj=-.543]
INFO - 16:58:17:
INFO - 16:58:17:
INFO - 16:58:17: Optimization result:
INFO - 16:58:17: Optimizer info:
INFO - 16:58:17: Status: 8
INFO - 16:58:17: Message: Positive directional derivative for linesearch
INFO - 16:58:17: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:17: Solution:
INFO - 16:58:17: The solution is feasible.
INFO - 16:58:17: Objective: -0.542697321963074
INFO - 16:58:17: Standardized constraints:
INFO - 16:58:17: g_1 = [-0.02164331 -0.03651708 -0.04692089 -0.05411259 -0.05930264 -0.13142264
INFO - 16:58:17: -0.10857736]
INFO - 16:58:17: Design space:
INFO - 16:58:17: +--------+-------------+-------+-------------+-------+
INFO - 16:58:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:17: +--------+-------------+-------+-------------+-------+
INFO - 16:58:17: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:58:17: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:17: +--------+-------------+-------+-------------+-------+
INFO - 16:58:17: *** End StructureScenario execution (time: 0:00:00.009432) ***
INFO - 16:58:17: ... 66%|██████▌ | 33/50 [00:07<00:03, 4.71 it/sec, obj=-3.79e+3]
INFO - 16:58:17:
INFO - 16:58:17: *** Start PropulsionScenario execution ***
INFO - 16:58:17: PropulsionScenario
INFO - 16:58:17: Disciplines: SobieskiPropulsion
INFO - 16:58:17: MDO formulation: DisciplinaryOpt
INFO - 16:58:17: Optimization problem:
INFO - 16:58:17: minimize y_34(x_3)
INFO - 16:58:17: with respect to x_3
INFO - 16:58:17: subject to constraints:
INFO - 16:58:17: g_3(x_3) <= 0.0
INFO - 16:58:17: over the design space:
INFO - 16:58:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:17: | x_3 | 0.1 | 0.1578632544864374 | 1 | float |
INFO - 16:58:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:17: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:17: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:17:
INFO - 16:58:17: ... 3%|▎ | 1/30 [00:00<00:00, 2279.51 it/sec, obj=0.936]
INFO - 16:58:17:
INFO - 16:58:17: ... 7%|▋ | 2/30 [00:00<00:00, 531.73 it/sec, obj=0.935]
INFO - 16:58:17:
INFO - 16:58:17: ... 10%|█ | 3/30 [00:00<00:00, 476.99 it/sec, obj=0.935]
INFO - 16:58:17:
INFO - 16:58:17: ... 13%|█▎ | 4/30 [00:00<00:00, 439.30 it/sec, obj=0.935]
INFO - 16:58:17:
INFO - 16:58:17:
INFO - 16:58:17: Optimization result:
INFO - 16:58:17: Optimizer info:
INFO - 16:58:17: Status: None
INFO - 16:58:17: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:58:17: Number of calls to the objective function by the optimizer: 7
INFO - 16:58:17: Solution:
INFO - 16:58:17: The solution is feasible.
INFO - 16:58:17: Objective: 0.9348358775310615
INFO - 16:58:17: Standardized constraints:
INFO - 16:58:17: g_3 = [-0.79258448 -0.20741552 0. -0.18321494]
INFO - 16:58:17: Design space:
INFO - 16:58:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:17: | x_3 | 0.1 | 0.1597339432742055 | 1 | float |
INFO - 16:58:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:17: *** End PropulsionScenario execution (time: 0:00:00.013035) ***
INFO - 16:58:17:
INFO - 16:58:17: *** Start AerodynamicsScenario execution ***
INFO - 16:58:17: AerodynamicsScenario
INFO - 16:58:17: Disciplines: SobieskiAerodynamics
INFO - 16:58:17: MDO formulation: DisciplinaryOpt
INFO - 16:58:17: Optimization problem:
INFO - 16:58:17: minimize -y_24(x_2) = -y_24(x_2)
INFO - 16:58:17: with respect to x_2
INFO - 16:58:17: subject to constraints:
INFO - 16:58:17: g_2(x_2) <= 0.0
INFO - 16:58:17: over the design space:
INFO - 16:58:17: +------+-------------+-------+-------------+-------+
INFO - 16:58:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:17: +------+-------------+-------+-------------+-------+
INFO - 16:58:17: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:17: +------+-------------+-------+-------------+-------+
INFO - 16:58:17: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:17: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:17:
INFO - 16:58:17: ... 3%|▎ | 1/30 [00:00<00:00, 1041.80 it/sec, obj=-8]
INFO - 16:58:17:
INFO - 16:58:17:
INFO - 16:58:17: Optimization result:
INFO - 16:58:17: Optimizer info:
INFO - 16:58:17: Status: 8
INFO - 16:58:17: Message: Positive directional derivative for linesearch
INFO - 16:58:17: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:17: Solution:
INFO - 16:58:17: The solution is feasible.
INFO - 16:58:17: Objective: -8.000169305043682
INFO - 16:58:17: Standardized constraints:
INFO - 16:58:17: g_2 = -0.00028500500786843297
INFO - 16:58:17: Design space:
INFO - 16:58:17: +------+-------------+-------+-------------+-------+
INFO - 16:58:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:17: +------+-------------+-------+-------------+-------+
INFO - 16:58:17: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:17: +------+-------------+-------+-------------+-------+
INFO - 16:58:17: *** End AerodynamicsScenario execution (time: 0:00:00.006788) ***
INFO - 16:58:17:
INFO - 16:58:17: *** Start StructureScenario execution ***
INFO - 16:58:17: StructureScenario
INFO - 16:58:17: Disciplines: SobieskiStructure
INFO - 16:58:17: MDO formulation: DisciplinaryOpt
INFO - 16:58:17: Optimization problem:
INFO - 16:58:17: minimize -y_11(x_1) = -y_11(x_1)
INFO - 16:58:17: with respect to x_1
INFO - 16:58:17: subject to constraints:
INFO - 16:58:17: g_1(x_1) <= 0.0
INFO - 16:58:17: over the design space:
INFO - 16:58:17: +--------+-------------+-------+-------------+-------+
INFO - 16:58:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:17: +--------+-------------+-------+-------------+-------+
INFO - 16:58:17: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:58:17: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:17: +--------+-------------+-------+-------------+-------+
INFO - 16:58:17: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:17: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:17:
INFO - 16:58:17: ... 3%|▎ | 1/30 [00:00<00:00, 673.68 it/sec, obj=-.543]
INFO - 16:58:17:
INFO - 16:58:17:
INFO - 16:58:17: Optimization result:
INFO - 16:58:17: Optimizer info:
INFO - 16:58:17: Status: 8
INFO - 16:58:17: Message: Positive directional derivative for linesearch
INFO - 16:58:17: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:17: Solution:
INFO - 16:58:17: The solution is feasible.
INFO - 16:58:17: Objective: -0.5425562899533857
INFO - 16:58:17: Standardized constraints:
INFO - 16:58:17: g_1 = [-0.02158393 -0.03647792 -0.04689167 -0.05408929 -0.05928327 -0.13136922
INFO - 16:58:17: -0.10863078]
INFO - 16:58:17: Design space:
INFO - 16:58:17: +--------+-------------+-------+-------------+-------+
INFO - 16:58:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:17: +--------+-------------+-------+-------------+-------+
INFO - 16:58:17: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:58:17: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:17: +--------+-------------+-------+-------------+-------+
INFO - 16:58:17: *** End StructureScenario execution (time: 0:00:00.009501) ***
INFO - 16:58:17: ... 68%|██████▊ | 34/50 [00:07<00:03, 4.75 it/sec, obj=-3.72e+3]
INFO - 16:58:17:
INFO - 16:58:17: *** Start PropulsionScenario execution ***
INFO - 16:58:17: PropulsionScenario
INFO - 16:58:17: Disciplines: SobieskiPropulsion
INFO - 16:58:17: MDO formulation: DisciplinaryOpt
INFO - 16:58:17: Optimization problem:
INFO - 16:58:17: minimize y_34(x_3)
INFO - 16:58:17: with respect to x_3
INFO - 16:58:17: subject to constraints:
INFO - 16:58:17: g_3(x_3) <= 0.0
INFO - 16:58:17: over the design space:
INFO - 16:58:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:17: | x_3 | 0.1 | 0.1597339432742055 | 1 | float |
INFO - 16:58:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:17: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:17: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:17:
INFO - 16:58:17: ... 3%|▎ | 1/30 [00:00<00:00, 2251.37 it/sec, obj=0.922]
INFO - 16:58:17:
INFO - 16:58:17: ... 7%|▋ | 2/30 [00:00<00:00, 542.57 it/sec, obj=0.924]
INFO - 16:58:17:
INFO - 16:58:17: ... 10%|█ | 3/30 [00:00<00:00, 599.36 it/sec, obj=0.923]
INFO - 16:58:17:
INFO - 16:58:17: ... 13%|█▎ | 4/30 [00:00<00:00, 495.63 it/sec, obj=0.924]
INFO - 16:58:17:
INFO - 16:58:17:
INFO - 16:58:17: Optimization result:
INFO - 16:58:17: Optimizer info:
INFO - 16:58:17: Status: 8
INFO - 16:58:17: Message: Positive directional derivative for linesearch
INFO - 16:58:17: Number of calls to the objective function by the optimizer: 5
INFO - 16:58:17: Solution:
INFO - 16:58:17: The solution is feasible.
INFO - 16:58:17: Objective: 0.9239330847904544
INFO - 16:58:17: Standardized constraints:
INFO - 16:58:17: g_3 = [-0.76719525 -0.23280475 0. -0.183255 ]
INFO - 16:58:17: Design space:
INFO - 16:58:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:17: | x_3 | 0.1 | 0.1562447456462875 | 1 | float |
INFO - 16:58:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:17: *** End PropulsionScenario execution (time: 0:00:00.013904) ***
INFO - 16:58:17:
INFO - 16:58:17: *** Start AerodynamicsScenario execution ***
INFO - 16:58:17: AerodynamicsScenario
INFO - 16:58:17: Disciplines: SobieskiAerodynamics
INFO - 16:58:17: MDO formulation: DisciplinaryOpt
INFO - 16:58:17: Optimization problem:
INFO - 16:58:17: minimize -y_24(x_2) = -y_24(x_2)
INFO - 16:58:17: with respect to x_2
INFO - 16:58:17: subject to constraints:
INFO - 16:58:17: g_2(x_2) <= 0.0
INFO - 16:58:17: over the design space:
INFO - 16:58:17: +------+-------------+-------+-------------+-------+
INFO - 16:58:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:17: +------+-------------+-------+-------------+-------+
INFO - 16:58:17: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:17: +------+-------------+-------+-------------+-------+
INFO - 16:58:17: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:17: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:17:
INFO - 16:58:17: ... 3%|▎ | 1/30 [00:00<00:00, 998.64 it/sec, obj=-8.02]
INFO - 16:58:17:
INFO - 16:58:17:
INFO - 16:58:17: Optimization result:
INFO - 16:58:17: Optimizer info:
INFO - 16:58:17: Status: 8
INFO - 16:58:17: Message: Positive directional derivative for linesearch
INFO - 16:58:17: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:17: Solution:
INFO - 16:58:17: The solution is feasible.
INFO - 16:58:17: Objective: -8.022538670180122
INFO - 16:58:17: Standardized constraints:
INFO - 16:58:17: g_2 = 0.0
INFO - 16:58:17: Design space:
INFO - 16:58:17: +------+-------------+-------+-------------+-------+
INFO - 16:58:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:17: +------+-------------+-------+-------------+-------+
INFO - 16:58:17: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:17: +------+-------------+-------+-------------+-------+
INFO - 16:58:17: *** End AerodynamicsScenario execution (time: 0:00:00.006738) ***
INFO - 16:58:17:
INFO - 16:58:17: *** Start StructureScenario execution ***
INFO - 16:58:17: StructureScenario
INFO - 16:58:17: Disciplines: SobieskiStructure
INFO - 16:58:17: MDO formulation: DisciplinaryOpt
INFO - 16:58:17: Optimization problem:
INFO - 16:58:17: minimize -y_11(x_1) = -y_11(x_1)
INFO - 16:58:17: with respect to x_1
INFO - 16:58:17: subject to constraints:
INFO - 16:58:17: g_1(x_1) <= 0.0
INFO - 16:58:17: over the design space:
INFO - 16:58:17: +--------+-------------+-------+-------------+-------+
INFO - 16:58:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:17: +--------+-------------+-------+-------------+-------+
INFO - 16:58:17: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:58:17: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:17: +--------+-------------+-------+-------------+-------+
INFO - 16:58:17: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:17: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:17:
INFO - 16:58:17: ... 3%|▎ | 1/30 [00:00<00:00, 703.86 it/sec, obj=-.566]
INFO - 16:58:17:
INFO - 16:58:17:
INFO - 16:58:17: Optimization result:
INFO - 16:58:17: Optimizer info:
INFO - 16:58:17: Status: 8
INFO - 16:58:17: Message: Positive directional derivative for linesearch
INFO - 16:58:17: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:17: Solution:
INFO - 16:58:17: The solution is feasible.
INFO - 16:58:17: Objective: -0.5659962760476568
INFO - 16:58:17: Standardized constraints:
INFO - 16:58:17: g_1 = [-0.01805093 -0.03333915 -0.04424381 -0.05182998 -0.05732217 -0.13720865
INFO - 16:58:17: -0.10279135]
INFO - 16:58:17: Design space:
INFO - 16:58:17: +--------+-------------+-------+-------------+-------+
INFO - 16:58:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:17: +--------+-------------+-------+-------------+-------+
INFO - 16:58:17: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:58:17: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:17: +--------+-------------+-------+-------------+-------+
INFO - 16:58:17: *** End StructureScenario execution (time: 0:00:00.009492) ***
INFO - 16:58:17: ... 70%|███████ | 35/50 [00:07<00:03, 4.79 it/sec, obj=-3.96e+3]
INFO - 16:58:17:
INFO - 16:58:17: *** Start PropulsionScenario execution ***
INFO - 16:58:17: PropulsionScenario
INFO - 16:58:17: Disciplines: SobieskiPropulsion
INFO - 16:58:17: MDO formulation: DisciplinaryOpt
INFO - 16:58:17: Optimization problem:
INFO - 16:58:17: minimize y_34(x_3)
INFO - 16:58:17: with respect to x_3
INFO - 16:58:17: subject to constraints:
INFO - 16:58:17: g_3(x_3) <= 0.0
INFO - 16:58:17: over the design space:
INFO - 16:58:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:17: | x_3 | 0.1 | 0.1562447456462875 | 1 | float |
INFO - 16:58:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:17: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:17: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:17:
INFO - 16:58:17: ... 3%|▎ | 1/30 [00:00<00:00, 1797.82 it/sec, obj=0.928]
INFO - 16:58:17:
INFO - 16:58:17: ... 7%|▋ | 2/30 [00:00<00:00, 486.30 it/sec, obj=0.928]
INFO - 16:58:17:
INFO - 16:58:17:
INFO - 16:58:17: Optimization result:
INFO - 16:58:17: Optimizer info:
INFO - 16:58:17: Status: 8
INFO - 16:58:17: Message: Positive directional derivative for linesearch
INFO - 16:58:17: Number of calls to the objective function by the optimizer: 3
INFO - 16:58:17: Solution:
INFO - 16:58:17: The solution is feasible.
INFO - 16:58:17: Objective: 0.9280276189891032
INFO - 16:58:17: Standardized constraints:
INFO - 16:58:17: g_3 = [-7.66769745e-01 -2.33230255e-01 4.44089210e-16 -1.82666319e-01]
INFO - 16:58:17: Design space:
INFO - 16:58:17: +------+-------------+-------------------+-------------+-------+
INFO - 16:58:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:17: +------+-------------+-------------------+-------------+-------+
INFO - 16:58:17: | x_3 | 0.1 | 0.157006775449483 | 1 | float |
INFO - 16:58:17: +------+-------------+-------------------+-------------+-------+
INFO - 16:58:17: *** End PropulsionScenario execution (time: 0:00:00.009645) ***
INFO - 16:58:17:
INFO - 16:58:17: *** Start AerodynamicsScenario execution ***
INFO - 16:58:17: AerodynamicsScenario
INFO - 16:58:17: Disciplines: SobieskiAerodynamics
INFO - 16:58:17: MDO formulation: DisciplinaryOpt
INFO - 16:58:17: Optimization problem:
INFO - 16:58:17: minimize -y_24(x_2) = -y_24(x_2)
INFO - 16:58:17: with respect to x_2
INFO - 16:58:17: subject to constraints:
INFO - 16:58:17: g_2(x_2) <= 0.0
INFO - 16:58:17: over the design space:
INFO - 16:58:17: +------+-------------+-------+-------------+-------+
INFO - 16:58:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:17: +------+-------------+-------+-------------+-------+
INFO - 16:58:17: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:17: +------+-------------+-------+-------------+-------+
INFO - 16:58:17: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:17: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:17:
INFO - 16:58:17: ... 3%|▎ | 1/30 [00:00<00:00, 1164.44 it/sec, obj=-8]
INFO - 16:58:17:
INFO - 16:58:17:
INFO - 16:58:17: Optimization result:
INFO - 16:58:17: Optimizer info:
INFO - 16:58:17: Status: 8
INFO - 16:58:17: Message: Positive directional derivative for linesearch
INFO - 16:58:17: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:17: Solution:
INFO - 16:58:17: The solution is feasible.
INFO - 16:58:17: Objective: -8.0036531984829
INFO - 16:58:17: Standardized constraints:
INFO - 16:58:17: g_2 = -0.000782197641777227
INFO - 16:58:17: Design space:
INFO - 16:58:17: +------+-------------+-------+-------------+-------+
INFO - 16:58:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:17: +------+-------------+-------+-------------+-------+
INFO - 16:58:17: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:17: +------+-------------+-------+-------------+-------+
INFO - 16:58:17: *** End AerodynamicsScenario execution (time: 0:00:00.007270) ***
INFO - 16:58:17:
INFO - 16:58:17: *** Start StructureScenario execution ***
INFO - 16:58:17: StructureScenario
INFO - 16:58:17: Disciplines: SobieskiStructure
INFO - 16:58:17: MDO formulation: DisciplinaryOpt
INFO - 16:58:17: Optimization problem:
INFO - 16:58:17: minimize -y_11(x_1) = -y_11(x_1)
INFO - 16:58:17: with respect to x_1
INFO - 16:58:17: subject to constraints:
INFO - 16:58:17: g_1(x_1) <= 0.0
INFO - 16:58:17: over the design space:
INFO - 16:58:17: +--------+-------------+-------+-------------+-------+
INFO - 16:58:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:17: +--------+-------------+-------+-------------+-------+
INFO - 16:58:17: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:58:17: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:17: +--------+-------------+-------+-------------+-------+
INFO - 16:58:17: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:17: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:17:
INFO - 16:58:17: ... 3%|▎ | 1/30 [00:00<00:00, 619.09 it/sec, obj=-.564]
INFO - 16:58:17:
INFO - 16:58:17:
INFO - 16:58:17: Optimization result:
INFO - 16:58:17: Optimizer info:
INFO - 16:58:17: Status: 8
INFO - 16:58:17: Message: Positive directional derivative for linesearch
INFO - 16:58:17: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:17: Solution:
INFO - 16:58:17: The solution is feasible.
INFO - 16:58:17: Objective: -0.5640459551030684
INFO - 16:58:17: Standardized constraints:
INFO - 16:58:17: g_1 = [-0.01543588 -0.0314192 -0.04273763 -0.05059325 -0.0562739 -0.13755425
INFO - 16:58:17: -0.10244575]
INFO - 16:58:17: Design space:
INFO - 16:58:17: +--------+-------------+-------+-------------+-------+
INFO - 16:58:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:17: +--------+-------------+-------+-------------+-------+
INFO - 16:58:17: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:58:17: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:17: +--------+-------------+-------+-------------+-------+
INFO - 16:58:17: *** End StructureScenario execution (time: 0:00:00.009559) ***
INFO - 16:58:17: ... 72%|███████▏ | 36/50 [00:07<00:02, 4.84 it/sec, obj=-3.91e+3]
INFO - 16:58:17:
INFO - 16:58:17: *** Start PropulsionScenario execution ***
INFO - 16:58:17: PropulsionScenario
INFO - 16:58:17: Disciplines: SobieskiPropulsion
INFO - 16:58:17: MDO formulation: DisciplinaryOpt
INFO - 16:58:17: Optimization problem:
INFO - 16:58:17: minimize y_34(x_3)
INFO - 16:58:17: with respect to x_3
INFO - 16:58:17: subject to constraints:
INFO - 16:58:17: g_3(x_3) <= 0.0
INFO - 16:58:17: over the design space:
INFO - 16:58:17: +------+-------------+-------------------+-------------+-------+
INFO - 16:58:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:17: +------+-------------+-------------------+-------------+-------+
INFO - 16:58:17: | x_3 | 0.1 | 0.157006775449483 | 1 | float |
INFO - 16:58:17: +------+-------------+-------------------+-------------+-------+
INFO - 16:58:17: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:17: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:17:
INFO - 16:58:17: ... 3%|▎ | 1/30 [00:00<00:00, 2270.87 it/sec, obj=0.927]
INFO - 16:58:17:
INFO - 16:58:17: ... 7%|▋ | 2/30 [00:00<00:00, 519.42 it/sec, obj=0.927]
INFO - 16:58:17:
INFO - 16:58:17: ... 10%|█ | 3/30 [00:00<00:00, 463.19 it/sec, obj=0.927]
INFO - 16:58:17:
INFO - 16:58:17:
INFO - 16:58:17: Optimization result:
INFO - 16:58:17: Optimizer info:
INFO - 16:58:17: Status: 8
INFO - 16:58:17: Message: Positive directional derivative for linesearch
INFO - 16:58:17: Number of calls to the objective function by the optimizer: 5
INFO - 16:58:17: Solution:
INFO - 16:58:17: The solution is feasible.
INFO - 16:58:17: Objective: 0.9271100575069225
INFO - 16:58:17: Standardized constraints:
INFO - 16:58:17: g_3 = [-7.70131728e-01 -2.29868272e-01 -3.33066907e-16 -1.83210766e-01]
INFO - 16:58:17: Design space:
INFO - 16:58:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:17: | x_3 | 0.1 | 0.1571930068896838 | 1 | float |
INFO - 16:58:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:17: *** End PropulsionScenario execution (time: 0:00:00.011894) ***
INFO - 16:58:17:
INFO - 16:58:17: *** Start AerodynamicsScenario execution ***
INFO - 16:58:17: AerodynamicsScenario
INFO - 16:58:17: Disciplines: SobieskiAerodynamics
INFO - 16:58:17: MDO formulation: DisciplinaryOpt
INFO - 16:58:17: Optimization problem:
INFO - 16:58:17: minimize -y_24(x_2) = -y_24(x_2)
INFO - 16:58:17: with respect to x_2
INFO - 16:58:17: subject to constraints:
INFO - 16:58:17: g_2(x_2) <= 0.0
INFO - 16:58:17: over the design space:
INFO - 16:58:17: +------+-------------+-------+-------------+-------+
INFO - 16:58:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:17: +------+-------------+-------+-------------+-------+
INFO - 16:58:17: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:17: +------+-------------+-------+-------------+-------+
INFO - 16:58:17: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:17: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:17:
INFO - 16:58:17: ... 3%|▎ | 1/30 [00:00<00:00, 1019.02 it/sec, obj=-8.01]
INFO - 16:58:17:
INFO - 16:58:17:
INFO - 16:58:17: Optimization result:
INFO - 16:58:17: Optimizer info:
INFO - 16:58:17: Status: 8
INFO - 16:58:17: Message: Positive directional derivative for linesearch
INFO - 16:58:17: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:17: Solution:
INFO - 16:58:17: The solution is feasible.
INFO - 16:58:17: Objective: -8.010456320977568
INFO - 16:58:17: Standardized constraints:
INFO - 16:58:17: g_2 = -0.000702105771318573
INFO - 16:58:17: Design space:
INFO - 16:58:17: +------+-------------+-------+-------------+-------+
INFO - 16:58:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:17: +------+-------------+-------+-------------+-------+
INFO - 16:58:17: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:17: +------+-------------+-------+-------------+-------+
INFO - 16:58:17: *** End AerodynamicsScenario execution (time: 0:00:00.006788) ***
INFO - 16:58:17:
INFO - 16:58:17: *** Start StructureScenario execution ***
INFO - 16:58:17: StructureScenario
INFO - 16:58:17: Disciplines: SobieskiStructure
INFO - 16:58:17: MDO formulation: DisciplinaryOpt
INFO - 16:58:17: Optimization problem:
INFO - 16:58:17: minimize -y_11(x_1) = -y_11(x_1)
INFO - 16:58:17: with respect to x_1
INFO - 16:58:17: subject to constraints:
INFO - 16:58:17: g_1(x_1) <= 0.0
INFO - 16:58:17: over the design space:
INFO - 16:58:17: +--------+-------------+-------+-------------+-------+
INFO - 16:58:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:17: +--------+-------------+-------+-------------+-------+
INFO - 16:58:17: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:58:17: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:17: +--------+-------------+-------+-------------+-------+
INFO - 16:58:17: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:17: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:17:
INFO - 16:58:17: ... 3%|▎ | 1/30 [00:00<00:00, 676.17 it/sec, obj=-.562]
INFO - 16:58:17:
INFO - 16:58:17:
INFO - 16:58:17: Optimization result:
INFO - 16:58:17: Optimizer info:
INFO - 16:58:17: Status: 8
INFO - 16:58:17: Message: Positive directional derivative for linesearch
INFO - 16:58:17: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:17: Solution:
INFO - 16:58:17: The solution is feasible.
INFO - 16:58:17: Objective: -0.5621070020534925
INFO - 16:58:17: Standardized constraints:
INFO - 16:58:17: g_1 = [-0.01628857 -0.03211234 -0.04330424 -0.05106899 -0.05668282 -0.13674716
INFO - 16:58:17: -0.10325284]
INFO - 16:58:17: Design space:
INFO - 16:58:17: +--------+-------------+-------+-------------+-------+
INFO - 16:58:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:17: +--------+-------------+-------+-------------+-------+
INFO - 16:58:17: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:58:17: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:17: +--------+-------------+-------+-------------+-------+
INFO - 16:58:17: *** End StructureScenario execution (time: 0:00:00.009490) ***
WARNING - 16:58:17: MDAJacobi has reached its maximum number of iterations but the normed residual 5.3741673231224435e-14 is still above the tolerance 1e-14.
INFO - 16:58:17: ... 74%|███████▍ | 37/50 [00:07<00:02, 4.85 it/sec, obj=-3.9e+3]
INFO - 16:58:17:
INFO - 16:58:17: *** Start PropulsionScenario execution ***
INFO - 16:58:17: PropulsionScenario
INFO - 16:58:17: Disciplines: SobieskiPropulsion
INFO - 16:58:17: MDO formulation: DisciplinaryOpt
INFO - 16:58:17: Optimization problem:
INFO - 16:58:17: minimize y_34(x_3)
INFO - 16:58:17: with respect to x_3
INFO - 16:58:17: subject to constraints:
INFO - 16:58:17: g_3(x_3) <= 0.0
INFO - 16:58:17: over the design space:
INFO - 16:58:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:17: | x_3 | 0.1 | 0.1571930068896838 | 1 | float |
INFO - 16:58:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:17: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:17: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:17:
INFO - 16:58:17: ... 3%|▎ | 1/30 [00:00<00:00, 2274.57 it/sec, obj=0.934]
INFO - 16:58:17:
INFO - 16:58:17: ... 7%|▋ | 2/30 [00:00<00:00, 533.56 it/sec, obj=0.933]
INFO - 16:58:17:
INFO - 16:58:17:
INFO - 16:58:17: Optimization result:
INFO - 16:58:17: Optimizer info:
INFO - 16:58:17: Status: 8
INFO - 16:58:17: Message: Positive directional derivative for linesearch
INFO - 16:58:17: Number of calls to the objective function by the optimizer: 3
INFO - 16:58:17: Solution:
INFO - 16:58:17: The solution is feasible.
INFO - 16:58:17: Objective: 0.9331604855951516
INFO - 16:58:17: Standardized constraints:
INFO - 16:58:17: g_3 = [-7.65181674e-01 -2.34818326e-01 4.44089210e-16 -1.82765758e-01]
INFO - 16:58:17: Design space:
INFO - 16:58:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:17: | x_3 | 0.1 | 0.1587506109242653 | 1 | float |
INFO - 16:58:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:17: *** End PropulsionScenario execution (time: 0:00:00.013017) ***
INFO - 16:58:17:
INFO - 16:58:17: *** Start AerodynamicsScenario execution ***
INFO - 16:58:17: AerodynamicsScenario
INFO - 16:58:17: Disciplines: SobieskiAerodynamics
INFO - 16:58:17: MDO formulation: DisciplinaryOpt
INFO - 16:58:17: Optimization problem:
INFO - 16:58:17: minimize -y_24(x_2) = -y_24(x_2)
INFO - 16:58:17: with respect to x_2
INFO - 16:58:17: subject to constraints:
INFO - 16:58:17: g_2(x_2) <= 0.0
INFO - 16:58:17: over the design space:
INFO - 16:58:17: +------+-------------+-------+-------------+-------+
INFO - 16:58:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:17: +------+-------------+-------+-------------+-------+
INFO - 16:58:17: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:17: +------+-------------+-------+-------------+-------+
INFO - 16:58:17: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:17: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:17:
INFO - 16:58:18: ... 3%|▎ | 1/30 [00:00<00:00, 1117.59 it/sec, obj=-7.91]
INFO - 16:58:18:
INFO - 16:58:18:
INFO - 16:58:18: Optimization result:
INFO - 16:58:18: Optimizer info:
INFO - 16:58:18: Status: 8
INFO - 16:58:18: Message: Positive directional derivative for linesearch
INFO - 16:58:18: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:18: Solution:
INFO - 16:58:18: The solution is feasible.
INFO - 16:58:18: Objective: -7.911992570107597
INFO - 16:58:18: Standardized constraints:
INFO - 16:58:18: g_2 = -0.001065986218533821
INFO - 16:58:18: Design space:
INFO - 16:58:18: +------+-------------+-------+-------------+-------+
INFO - 16:58:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:18: +------+-------------+-------+-------------+-------+
INFO - 16:58:18: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:18: +------+-------------+-------+-------------+-------+
INFO - 16:58:18: *** End AerodynamicsScenario execution (time: 0:00:00.006739) ***
INFO - 16:58:18:
INFO - 16:58:18: *** Start StructureScenario execution ***
INFO - 16:58:18: StructureScenario
INFO - 16:58:18: Disciplines: SobieskiStructure
INFO - 16:58:18: MDO formulation: DisciplinaryOpt
INFO - 16:58:18: Optimization problem:
INFO - 16:58:18: minimize -y_11(x_1) = -y_11(x_1)
INFO - 16:58:18: with respect to x_1
INFO - 16:58:18: subject to constraints:
INFO - 16:58:18: g_1(x_1) <= 0.0
INFO - 16:58:18: over the design space:
INFO - 16:58:18: +--------+-------------+-------+-------------+-------+
INFO - 16:58:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:18: +--------+-------------+-------+-------------+-------+
INFO - 16:58:18: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:58:18: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:18: +--------+-------------+-------+-------------+-------+
INFO - 16:58:18: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:18: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:18:
INFO - 16:58:18: ... 3%|▎ | 1/30 [00:00<00:00, 631.86 it/sec, obj=-.563]
INFO - 16:58:18:
INFO - 16:58:18:
INFO - 16:58:18: Optimization result:
INFO - 16:58:18: Optimizer info:
INFO - 16:58:18: Status: 8
INFO - 16:58:18: Message: Positive directional derivative for linesearch
INFO - 16:58:18: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:18: Solution:
INFO - 16:58:18: The solution is feasible.
INFO - 16:58:18: Objective: -0.5634888267925722
INFO - 16:58:18: Standardized constraints:
INFO - 16:58:18: g_1 = [-0.01484617 -0.03102294 -0.04243927 -0.050354 -0.05607422 -0.13722022
INFO - 16:58:18: -0.10277978]
INFO - 16:58:18: Design space:
INFO - 16:58:18: +--------+-------------+-------+-------------+-------+
INFO - 16:58:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:18: +--------+-------------+-------+-------------+-------+
INFO - 16:58:18: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:58:18: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:18: +--------+-------------+-------+-------------+-------+
INFO - 16:58:18: *** End StructureScenario execution (time: 0:00:00.009460) ***
INFO - 16:58:18: ... 76%|███████▌ | 38/50 [00:07<00:02, 4.89 it/sec, obj=-3.84e+3]
INFO - 16:58:18:
INFO - 16:58:18: *** Start PropulsionScenario execution ***
INFO - 16:58:18: PropulsionScenario
INFO - 16:58:18: Disciplines: SobieskiPropulsion
INFO - 16:58:18: MDO formulation: DisciplinaryOpt
INFO - 16:58:18: Optimization problem:
INFO - 16:58:18: minimize y_34(x_3)
INFO - 16:58:18: with respect to x_3
INFO - 16:58:18: subject to constraints:
INFO - 16:58:18: g_3(x_3) <= 0.0
INFO - 16:58:18: over the design space:
INFO - 16:58:18: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:18: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:18: | x_3 | 0.1 | 0.1587506109242653 | 1 | float |
INFO - 16:58:18: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:18: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:18: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:18:
INFO - 16:58:18: ... 3%|▎ | 1/30 [00:00<00:00, 2115.13 it/sec, obj=0.929]
INFO - 16:58:18:
INFO - 16:58:18: ... 7%|▋ | 2/30 [00:00<00:00, 529.08 it/sec, obj=0.929]
INFO - 16:58:18:
INFO - 16:58:18: ... 10%|█ | 3/30 [00:00<00:00, 579.51 it/sec, obj=0.929]
INFO - 16:58:18:
INFO - 16:58:18: ... 13%|█▎ | 4/30 [00:00<00:00, 493.58 it/sec, obj=0.929]
INFO - 16:58:18:
INFO - 16:58:18: ... 17%|█▋ | 5/30 [00:00<00:00, 449.57 it/sec, obj=0.929]
INFO - 16:58:18:
INFO - 16:58:18:
INFO - 16:58:18: Optimization result:
INFO - 16:58:18: Optimizer info:
INFO - 16:58:18: Status: 8
INFO - 16:58:18: Message: Positive directional derivative for linesearch
INFO - 16:58:18: Number of calls to the objective function by the optimizer: 6
INFO - 16:58:18: Solution:
INFO - 16:58:18: The solution is feasible.
INFO - 16:58:18: Objective: 0.9292820649176974
INFO - 16:58:18: Standardized constraints:
INFO - 16:58:18: g_3 = [-7.67601978e-01 -2.32398022e-01 4.44089210e-16 -1.82811512e-01]
INFO - 16:58:18: Design space:
INFO - 16:58:18: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:18: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:18: | x_3 | 0.1 | 0.1575303744515433 | 1 | float |
INFO - 16:58:18: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:18: *** End PropulsionScenario execution (time: 0:00:00.016742) ***
INFO - 16:58:18:
INFO - 16:58:18: *** Start AerodynamicsScenario execution ***
INFO - 16:58:18: AerodynamicsScenario
INFO - 16:58:18: Disciplines: SobieskiAerodynamics
INFO - 16:58:18: MDO formulation: DisciplinaryOpt
INFO - 16:58:18: Optimization problem:
INFO - 16:58:18: minimize -y_24(x_2) = -y_24(x_2)
INFO - 16:58:18: with respect to x_2
INFO - 16:58:18: subject to constraints:
INFO - 16:58:18: g_2(x_2) <= 0.0
INFO - 16:58:18: over the design space:
INFO - 16:58:18: +------+-------------+-------+-------------+-------+
INFO - 16:58:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:18: +------+-------------+-------+-------------+-------+
INFO - 16:58:18: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:18: +------+-------------+-------+-------------+-------+
INFO - 16:58:18: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:18: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:18:
INFO - 16:58:18: ... 3%|▎ | 1/30 [00:00<00:00, 1175.20 it/sec, obj=-7.95]
INFO - 16:58:18:
INFO - 16:58:18:
INFO - 16:58:18: Optimization result:
INFO - 16:58:18: Optimizer info:
INFO - 16:58:18: Status: 8
INFO - 16:58:18: Message: Positive directional derivative for linesearch
INFO - 16:58:18: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:18: Solution:
INFO - 16:58:18: The solution is feasible.
INFO - 16:58:18: Objective: -7.95419515559486
INFO - 16:58:18: Standardized constraints:
INFO - 16:58:18: g_2 = -0.0009497932862085889
INFO - 16:58:18: Design space:
INFO - 16:58:18: +------+-------------+-------+-------------+-------+
INFO - 16:58:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:18: +------+-------------+-------+-------------+-------+
INFO - 16:58:18: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:18: +------+-------------+-------+-------------+-------+
INFO - 16:58:18: *** End AerodynamicsScenario execution (time: 0:00:00.006705) ***
INFO - 16:58:18:
INFO - 16:58:18: *** Start StructureScenario execution ***
INFO - 16:58:18: StructureScenario
INFO - 16:58:18: Disciplines: SobieskiStructure
INFO - 16:58:18: MDO formulation: DisciplinaryOpt
INFO - 16:58:18: Optimization problem:
INFO - 16:58:18: minimize -y_11(x_1) = -y_11(x_1)
INFO - 16:58:18: with respect to x_1
INFO - 16:58:18: subject to constraints:
INFO - 16:58:18: g_1(x_1) <= 0.0
INFO - 16:58:18: over the design space:
INFO - 16:58:18: +--------+-------------+-------+-------------+-------+
INFO - 16:58:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:18: +--------+-------------+-------+-------------+-------+
INFO - 16:58:18: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:58:18: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:18: +--------+-------------+-------+-------------+-------+
INFO - 16:58:18: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:18: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:18:
INFO - 16:58:18: ... 3%|▎ | 1/30 [00:00<00:00, 647.67 it/sec, obj=-.561]
INFO - 16:58:18:
INFO - 16:58:18:
INFO - 16:58:18: Optimization result:
INFO - 16:58:18: Optimizer info:
INFO - 16:58:18: Status: 8
INFO - 16:58:18: Message: Positive directional derivative for linesearch
INFO - 16:58:18: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:18: Solution:
INFO - 16:58:18: The solution is feasible.
INFO - 16:58:18: Objective: -0.5607534629952942
INFO - 16:58:18: Standardized constraints:
INFO - 16:58:18: g_1 = [-0.01506212 -0.03116419 -0.04254419 -0.05043745 -0.05614349 -0.13738846
INFO - 16:58:18: -0.10261154]
INFO - 16:58:18: Design space:
INFO - 16:58:18: +--------+-------------+-------+-------------+-------+
INFO - 16:58:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:18: +--------+-------------+-------+-------------+-------+
INFO - 16:58:18: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:58:18: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:18: +--------+-------------+-------+-------------+-------+
INFO - 16:58:18: *** End StructureScenario execution (time: 0:00:00.009405) ***
INFO - 16:58:18: ... 78%|███████▊ | 39/50 [00:07<00:02, 4.92 it/sec, obj=-3.87e+3]
INFO - 16:58:18:
INFO - 16:58:18: *** Start PropulsionScenario execution ***
INFO - 16:58:18: PropulsionScenario
INFO - 16:58:18: Disciplines: SobieskiPropulsion
INFO - 16:58:18: MDO formulation: DisciplinaryOpt
INFO - 16:58:18: Optimization problem:
INFO - 16:58:18: minimize y_34(x_3)
INFO - 16:58:18: with respect to x_3
INFO - 16:58:18: subject to constraints:
INFO - 16:58:18: g_3(x_3) <= 0.0
INFO - 16:58:18: over the design space:
INFO - 16:58:18: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:18: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:18: | x_3 | 0.1 | 0.1575303744515433 | 1 | float |
INFO - 16:58:18: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:18: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:18: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:18:
INFO - 16:58:18: ... 3%|▎ | 1/30 [00:00<00:00, 1894.45 it/sec, obj=0.937]
INFO - 16:58:18:
INFO - 16:58:18: ... 7%|▋ | 2/30 [00:00<00:00, 541.13 it/sec, obj=0.936]
INFO - 16:58:18:
INFO - 16:58:18: ... 10%|█ | 3/30 [00:00<00:00, 482.55 it/sec, obj=0.936]
INFO - 16:58:18:
INFO - 16:58:18: ... 13%|█▎ | 4/30 [00:00<00:00, 432.15 it/sec, obj=0.936]
INFO - 16:58:18:
INFO - 16:58:18:
INFO - 16:58:18: Optimization result:
INFO - 16:58:18: Optimizer info:
INFO - 16:58:18: Status: None
INFO - 16:58:18: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:58:18: Number of calls to the objective function by the optimizer: 5
INFO - 16:58:18: Solution:
INFO - 16:58:18: The solution is feasible.
INFO - 16:58:18: Objective: 0.9357690421992685
INFO - 16:58:18: Standardized constraints:
INFO - 16:58:18: g_3 = [-7.66073565e-01 -2.33926435e-01 -2.22044605e-16 -1.82715784e-01]
INFO - 16:58:18: Design space:
INFO - 16:58:18: +------+-------------+-------------------+-------------+-------+
INFO - 16:58:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:18: +------+-------------+-------------------+-------------+-------+
INFO - 16:58:18: | x_3 | 0.1 | 0.159580367067668 | 1 | float |
INFO - 16:58:18: +------+-------------+-------------------+-------------+-------+
INFO - 16:58:18: *** End PropulsionScenario execution (time: 0:00:00.012989) ***
INFO - 16:58:18:
INFO - 16:58:18: *** Start AerodynamicsScenario execution ***
INFO - 16:58:18: AerodynamicsScenario
INFO - 16:58:18: Disciplines: SobieskiAerodynamics
INFO - 16:58:18: MDO formulation: DisciplinaryOpt
INFO - 16:58:18: Optimization problem:
INFO - 16:58:18: minimize -y_24(x_2) = -y_24(x_2)
INFO - 16:58:18: with respect to x_2
INFO - 16:58:18: subject to constraints:
INFO - 16:58:18: g_2(x_2) <= 0.0
INFO - 16:58:18: over the design space:
INFO - 16:58:18: +------+-------------+-------+-------------+-------+
INFO - 16:58:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:18: +------+-------------+-------+-------------+-------+
INFO - 16:58:18: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:18: +------+-------------+-------+-------------+-------+
INFO - 16:58:18: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:18: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:18:
INFO - 16:58:18: ... 3%|▎ | 1/30 [00:00<00:00, 1013.85 it/sec, obj=-7.88]
INFO - 16:58:18:
INFO - 16:58:18:
INFO - 16:58:18: Optimization result:
INFO - 16:58:18: Optimizer info:
INFO - 16:58:18: Status: 8
INFO - 16:58:18: Message: Positive directional derivative for linesearch
INFO - 16:58:18: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:18: Solution:
INFO - 16:58:18: The solution is feasible.
INFO - 16:58:18: Objective: -7.876568820769501
INFO - 16:58:18: Standardized constraints:
INFO - 16:58:18: g_2 = -0.0006569487445207134
INFO - 16:58:18: Design space:
INFO - 16:58:18: +------+-------------+-------+-------------+-------+
INFO - 16:58:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:18: +------+-------------+-------+-------------+-------+
INFO - 16:58:18: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:18: +------+-------------+-------+-------------+-------+
INFO - 16:58:18: *** End AerodynamicsScenario execution (time: 0:00:00.006706) ***
INFO - 16:58:18:
INFO - 16:58:18: *** Start StructureScenario execution ***
INFO - 16:58:18: StructureScenario
INFO - 16:58:18: Disciplines: SobieskiStructure
INFO - 16:58:18: MDO formulation: DisciplinaryOpt
INFO - 16:58:18: Optimization problem:
INFO - 16:58:18: minimize -y_11(x_1) = -y_11(x_1)
INFO - 16:58:18: with respect to x_1
INFO - 16:58:18: subject to constraints:
INFO - 16:58:18: g_1(x_1) <= 0.0
INFO - 16:58:18: over the design space:
INFO - 16:58:18: +--------+-------------+-------+-------------+-------+
INFO - 16:58:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:18: +--------+-------------+-------+-------------+-------+
INFO - 16:58:18: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:58:18: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:18: +--------+-------------+-------+-------------+-------+
INFO - 16:58:18: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:18: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:18:
INFO - 16:58:18: ... 3%|▎ | 1/30 [00:00<00:00, 703.39 it/sec, obj=-.561]
INFO - 16:58:18:
INFO - 16:58:18:
INFO - 16:58:18: Optimization result:
INFO - 16:58:18: Optimizer info:
INFO - 16:58:18: Status: 8
INFO - 16:58:18: Message: Positive directional derivative for linesearch
INFO - 16:58:18: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:18: Solution:
INFO - 16:58:18: The solution is feasible.
INFO - 16:58:18: Objective: -0.5612644143424887
INFO - 16:58:18: Standardized constraints:
INFO - 16:58:18: g_1 = [-0.01636172 -0.03215774 -0.04333703 -0.05109461 -0.05670383 -0.13682777
INFO - 16:58:18: -0.10317223]
INFO - 16:58:18: Design space:
INFO - 16:58:18: +--------+-------------+-------+-------------+-------+
INFO - 16:58:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:18: +--------+-------------+-------+-------------+-------+
INFO - 16:58:18: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:58:18: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:18: +--------+-------------+-------+-------------+-------+
INFO - 16:58:18: *** End StructureScenario execution (time: 0:00:00.009499) ***
INFO - 16:58:18: ... 80%|████████ | 40/50 [00:08<00:02, 4.95 it/sec, obj=-3.79e+3]
INFO - 16:58:18:
INFO - 16:58:18: *** Start PropulsionScenario execution ***
INFO - 16:58:18: PropulsionScenario
INFO - 16:58:18: Disciplines: SobieskiPropulsion
INFO - 16:58:18: MDO formulation: DisciplinaryOpt
INFO - 16:58:18: Optimization problem:
INFO - 16:58:18: minimize y_34(x_3)
INFO - 16:58:18: with respect to x_3
INFO - 16:58:18: subject to constraints:
INFO - 16:58:18: g_3(x_3) <= 0.0
INFO - 16:58:18: over the design space:
INFO - 16:58:18: +------+-------------+-------------------+-------------+-------+
INFO - 16:58:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:18: +------+-------------+-------------------+-------------+-------+
INFO - 16:58:18: | x_3 | 0.1 | 0.159580367067668 | 1 | float |
INFO - 16:58:18: +------+-------------+-------------------+-------------+-------+
INFO - 16:58:18: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:18: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:18:
INFO - 16:58:18: ... 3%|▎ | 1/30 [00:00<00:00, 2262.30 it/sec, obj=0.923]
INFO - 16:58:18:
INFO - 16:58:18: ... 7%|▋ | 2/30 [00:00<00:00, 544.43 it/sec, obj=0.924]
INFO - 16:58:18:
INFO - 16:58:18: ... 10%|█ | 3/30 [00:00<00:00, 597.82 it/sec, obj=0.923]
INFO - 16:58:18:
INFO - 16:58:18: ... 13%|█▎ | 4/30 [00:00<00:00, 495.71 it/sec, obj=0.924]
INFO - 16:58:18:
INFO - 16:58:18: ... 17%|█▋ | 5/30 [00:00<00:00, 449.06 it/sec, obj=0.924]
INFO - 16:58:18:
INFO - 16:58:18: ... 20%|██ | 6/30 [00:00<00:00, 372.45 it/sec, obj=0.924]
INFO - 16:58:18:
INFO - 16:58:18:
INFO - 16:58:18: Optimization result:
INFO - 16:58:18: Optimizer info:
INFO - 16:58:18: Status: None
INFO - 16:58:18: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:58:18: Number of calls to the objective function by the optimizer: 8
INFO - 16:58:18: Solution:
INFO - 16:58:18: The solution is feasible.
INFO - 16:58:18: Objective: 0.924357085130999
INFO - 16:58:18: Standardized constraints:
INFO - 16:58:18: g_3 = [-0.76085911 -0.23914089 0. -0.18325434]
INFO - 16:58:18: Design space:
INFO - 16:58:18: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:18: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:18: | x_3 | 0.1 | 0.1563740651916501 | 1 | float |
INFO - 16:58:18: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:18: *** End PropulsionScenario execution (time: 0:00:00.019858) ***
INFO - 16:58:18:
INFO - 16:58:18: *** Start AerodynamicsScenario execution ***
INFO - 16:58:18: AerodynamicsScenario
INFO - 16:58:18: Disciplines: SobieskiAerodynamics
INFO - 16:58:18: MDO formulation: DisciplinaryOpt
INFO - 16:58:18: Optimization problem:
INFO - 16:58:18: minimize -y_24(x_2) = -y_24(x_2)
INFO - 16:58:18: with respect to x_2
INFO - 16:58:18: subject to constraints:
INFO - 16:58:18: g_2(x_2) <= 0.0
INFO - 16:58:18: over the design space:
INFO - 16:58:18: +------+-------------+-------+-------------+-------+
INFO - 16:58:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:18: +------+-------------+-------+-------------+-------+
INFO - 16:58:18: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:18: +------+-------------+-------+-------------+-------+
INFO - 16:58:18: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:18: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:18:
INFO - 16:58:18: ... 3%|▎ | 1/30 [00:00<00:00, 1054.11 it/sec, obj=-7.98]
INFO - 16:58:18:
INFO - 16:58:18:
INFO - 16:58:18: Optimization result:
INFO - 16:58:18: Optimizer info:
INFO - 16:58:18: Status: 8
INFO - 16:58:18: Message: Positive directional derivative for linesearch
INFO - 16:58:18: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:18: Solution:
INFO - 16:58:18: The solution is feasible.
INFO - 16:58:18: Objective: -7.978365049277423
INFO - 16:58:18: Standardized constraints:
INFO - 16:58:18: g_2 = -0.0005300370177978575
INFO - 16:58:18: Design space:
INFO - 16:58:18: +------+-------------+-------+-------------+-------+
INFO - 16:58:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:18: +------+-------------+-------+-------------+-------+
INFO - 16:58:18: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:18: +------+-------------+-------+-------------+-------+
INFO - 16:58:18: *** End AerodynamicsScenario execution (time: 0:00:00.006711) ***
INFO - 16:58:18:
INFO - 16:58:18: *** Start StructureScenario execution ***
INFO - 16:58:18: StructureScenario
INFO - 16:58:18: Disciplines: SobieskiStructure
INFO - 16:58:18: MDO formulation: DisciplinaryOpt
INFO - 16:58:18: Optimization problem:
INFO - 16:58:18: minimize -y_11(x_1) = -y_11(x_1)
INFO - 16:58:18: with respect to x_1
INFO - 16:58:18: subject to constraints:
INFO - 16:58:18: g_1(x_1) <= 0.0
INFO - 16:58:18: over the design space:
INFO - 16:58:18: +--------+-------------+-------+-------------+-------+
INFO - 16:58:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:18: +--------+-------------+-------+-------------+-------+
INFO - 16:58:18: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:58:18: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:18: +--------+-------------+-------+-------------+-------+
INFO - 16:58:18: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:18: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:18:
INFO - 16:58:18: ... 3%|▎ | 1/30 [00:00<00:00, 702.33 it/sec, obj=-.561]
INFO - 16:58:18:
INFO - 16:58:18:
INFO - 16:58:18: Optimization result:
INFO - 16:58:18: Optimizer info:
INFO - 16:58:18: Status: 8
INFO - 16:58:18: Message: Positive directional derivative for linesearch
INFO - 16:58:18: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:18: Solution:
INFO - 16:58:18: The solution is feasible.
INFO - 16:58:18: Objective: -0.5606386752877379
INFO - 16:58:18: Standardized constraints:
INFO - 16:58:18: g_1 = [-0.0161146 -0.03189922 -0.04310798 -0.05089449 -0.05652769 -0.137658
INFO - 16:58:18: -0.102342 ]
INFO - 16:58:18: Design space:
INFO - 16:58:18: +--------+-------------+-------+-------------+-------+
INFO - 16:58:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:18: +--------+-------------+-------+-------------+-------+
INFO - 16:58:18: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:58:18: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:18: +--------+-------------+-------+-------------+-------+
INFO - 16:58:18: *** End StructureScenario execution (time: 0:00:00.009616) ***
WARNING - 16:58:18: MDAJacobi has reached its maximum number of iterations but the normed residual 5.3741673231224435e-14 is still above the tolerance 1e-14.
INFO - 16:58:18: ... 82%|████████▏ | 41/50 [00:08<00:01, 4.95 it/sec, obj=-3.9e+3]
INFO - 16:58:18:
INFO - 16:58:18: *** Start PropulsionScenario execution ***
INFO - 16:58:18: PropulsionScenario
INFO - 16:58:18: Disciplines: SobieskiPropulsion
INFO - 16:58:18: MDO formulation: DisciplinaryOpt
INFO - 16:58:18: Optimization problem:
INFO - 16:58:18: minimize y_34(x_3)
INFO - 16:58:18: with respect to x_3
INFO - 16:58:18: subject to constraints:
INFO - 16:58:18: g_3(x_3) <= 0.0
INFO - 16:58:18: over the design space:
INFO - 16:58:18: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:18: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:18: | x_3 | 0.1 | 0.1563740651916501 | 1 | float |
INFO - 16:58:18: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:18: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:18: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:18:
INFO - 16:58:18: ... 3%|▎ | 1/30 [00:00<00:00, 2248.96 it/sec, obj=0.925]
INFO - 16:58:18:
INFO - 16:58:18: ... 7%|▋ | 2/30 [00:00<00:00, 529.88 it/sec, obj=0.925]
INFO - 16:58:18:
INFO - 16:58:18: ... 10%|█ | 3/30 [00:00<00:00, 398.41 it/sec, obj=0.925]
INFO - 16:58:18:
INFO - 16:58:18: ... 13%|█▎ | 4/30 [00:00<00:00, 241.78 it/sec, obj=0.925]
INFO - 16:58:18:
INFO - 16:58:18:
INFO - 16:58:18: Optimization result:
INFO - 16:58:18: Optimizer info:
INFO - 16:58:18: Status: None
INFO - 16:58:18: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:58:18: Number of calls to the objective function by the optimizer: 17
INFO - 16:58:18: Solution:
INFO - 16:58:18: The solution is feasible.
INFO - 16:58:18: Objective: 0.9252146007143515
INFO - 16:58:18: Standardized constraints:
INFO - 16:58:18: g_3 = [-7.66878141e-01 -2.33121859e-01 -2.22044605e-16 -1.83069240e-01]
INFO - 16:58:18: Design space:
INFO - 16:58:18: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:18: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:18: | x_3 | 0.1 | 0.1564793124570655 | 1 | float |
INFO - 16:58:18: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:18: *** End PropulsionScenario execution (time: 0:00:00.020356) ***
INFO - 16:58:18:
INFO - 16:58:18: *** Start AerodynamicsScenario execution ***
INFO - 16:58:18: AerodynamicsScenario
INFO - 16:58:18: Disciplines: SobieskiAerodynamics
INFO - 16:58:18: MDO formulation: DisciplinaryOpt
INFO - 16:58:18: Optimization problem:
INFO - 16:58:18: minimize -y_24(x_2) = -y_24(x_2)
INFO - 16:58:18: with respect to x_2
INFO - 16:58:18: subject to constraints:
INFO - 16:58:18: g_2(x_2) <= 0.0
INFO - 16:58:18: over the design space:
INFO - 16:58:18: +------+-------------+-------+-------------+-------+
INFO - 16:58:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:18: +------+-------------+-------+-------------+-------+
INFO - 16:58:18: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:18: +------+-------------+-------+-------------+-------+
INFO - 16:58:18: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:18: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:18:
INFO - 16:58:18: ... 3%|▎ | 1/30 [00:00<00:00, 992.50 it/sec, obj=-8.04]
INFO - 16:58:18:
INFO - 16:58:18:
INFO - 16:58:18: Optimization result:
INFO - 16:58:18: Optimizer info:
INFO - 16:58:18: Status: 8
INFO - 16:58:18: Message: Positive directional derivative for linesearch
INFO - 16:58:18: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:18: Solution:
INFO - 16:58:18: The solution is feasible.
INFO - 16:58:18: Objective: -8.042310431916396
INFO - 16:58:18: Standardized constraints:
INFO - 16:58:18: g_2 = 8.217987306213814e-07
INFO - 16:58:18: Design space:
INFO - 16:58:18: +------+-------------+-------+-------------+-------+
INFO - 16:58:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:18: +------+-------------+-------+-------------+-------+
INFO - 16:58:18: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:18: +------+-------------+-------+-------------+-------+
INFO - 16:58:18: *** End AerodynamicsScenario execution (time: 0:00:00.006785) ***
INFO - 16:58:18:
INFO - 16:58:18: *** Start StructureScenario execution ***
INFO - 16:58:18: StructureScenario
INFO - 16:58:18: Disciplines: SobieskiStructure
INFO - 16:58:18: MDO formulation: DisciplinaryOpt
INFO - 16:58:18: Optimization problem:
INFO - 16:58:18: minimize -y_11(x_1) = -y_11(x_1)
INFO - 16:58:18: with respect to x_1
INFO - 16:58:18: subject to constraints:
INFO - 16:58:18: g_1(x_1) <= 0.0
INFO - 16:58:18: over the design space:
INFO - 16:58:18: +--------+-------------+-------+-------------+-------+
INFO - 16:58:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:18: +--------+-------------+-------+-------------+-------+
INFO - 16:58:18: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:58:18: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:18: +--------+-------------+-------+-------------+-------+
INFO - 16:58:18: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:18: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:18:
INFO - 16:58:18: ... 3%|▎ | 1/30 [00:00<00:00, 675.09 it/sec, obj=-.566]
INFO - 16:58:18:
INFO - 16:58:18:
INFO - 16:58:18: Optimization result:
INFO - 16:58:18: Optimizer info:
INFO - 16:58:18: Status: 8
INFO - 16:58:18: Message: Positive directional derivative for linesearch
INFO - 16:58:18: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:18: Solution:
INFO - 16:58:18: The solution is feasible.
INFO - 16:58:18: Objective: -0.56583676337433
INFO - 16:58:18: Standardized constraints:
INFO - 16:58:18: g_1 = [-0.01811056 -0.03339011 -0.04428623 -0.05186593 -0.05735325 -0.13713111
INFO - 16:58:18: -0.10286889]
INFO - 16:58:18: Design space:
INFO - 16:58:18: +--------+-------------+-------+-------------+-------+
INFO - 16:58:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:18: +--------+-------------+-------+-------------+-------+
INFO - 16:58:18: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:58:18: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:18: +--------+-------------+-------+-------------+-------+
INFO - 16:58:18: *** End StructureScenario execution (time: 0:00:00.009528) ***
INFO - 16:58:18: ... 84%|████████▍ | 42/50 [00:08<00:01, 4.98 it/sec, obj=-3.95e+3]
INFO - 16:58:18:
INFO - 16:58:18: *** Start PropulsionScenario execution ***
INFO - 16:58:18: PropulsionScenario
INFO - 16:58:18: Disciplines: SobieskiPropulsion
INFO - 16:58:18: MDO formulation: DisciplinaryOpt
INFO - 16:58:18: Optimization problem:
INFO - 16:58:18: minimize y_34(x_3)
INFO - 16:58:18: with respect to x_3
INFO - 16:58:18: subject to constraints:
INFO - 16:58:18: g_3(x_3) <= 0.0
INFO - 16:58:18: over the design space:
INFO - 16:58:18: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:18: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:18: | x_3 | 0.1 | 0.1564793124570655 | 1 | float |
INFO - 16:58:18: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:18: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:18: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:18:
INFO - 16:58:18: ... 3%|▎ | 1/30 [00:00<00:00, 2255.00 it/sec, obj=0.925]
INFO - 16:58:18:
INFO - 16:58:18: ... 7%|▋ | 2/30 [00:00<00:00, 508.68 it/sec, obj=0.925]
INFO - 16:58:18:
INFO - 16:58:18: ... 10%|█ | 3/30 [00:00<00:00, 456.51 it/sec, obj=0.925]
INFO - 16:58:18:
INFO - 16:58:18: ... 13%|█▎ | 4/30 [00:00<00:00, 486.03 it/sec, obj=0.925]
INFO - 16:58:18:
INFO - 16:58:18:
INFO - 16:58:18: Optimization result:
INFO - 16:58:18: Optimizer info:
INFO - 16:58:18: Status: None
INFO - 16:58:18: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:58:18: Number of calls to the objective function by the optimizer: 5
INFO - 16:58:18: Solution:
INFO - 16:58:18: The solution is feasible.
INFO - 16:58:18: Objective: 0.9251880265246617
INFO - 16:58:18: Standardized constraints:
INFO - 16:58:18: g_3 = [-7.69490655e-01 -2.30509345e-01 -6.66133815e-16 -1.83193045e-01]
INFO - 16:58:18: Design space:
INFO - 16:58:18: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:18: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:18: | x_3 | 0.1 | 0.1565774099863879 | 1 | float |
INFO - 16:58:18: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:18: *** End PropulsionScenario execution (time: 0:00:00.012116) ***
INFO - 16:58:18:
INFO - 16:58:18: *** Start AerodynamicsScenario execution ***
INFO - 16:58:18: AerodynamicsScenario
INFO - 16:58:18: Disciplines: SobieskiAerodynamics
INFO - 16:58:18: MDO formulation: DisciplinaryOpt
INFO - 16:58:18: Optimization problem:
INFO - 16:58:18: minimize -y_24(x_2) = -y_24(x_2)
INFO - 16:58:18: with respect to x_2
INFO - 16:58:18: subject to constraints:
INFO - 16:58:18: g_2(x_2) <= 0.0
INFO - 16:58:18: over the design space:
INFO - 16:58:18: +------+-------------+-------+-------------+-------+
INFO - 16:58:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:18: +------+-------------+-------+-------------+-------+
INFO - 16:58:18: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:18: +------+-------------+-------+-------------+-------+
INFO - 16:58:18: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:18: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:18:
INFO - 16:58:18: ... 3%|▎ | 1/30 [00:00<00:00, 1172.58 it/sec, obj=-8.05]
INFO - 16:58:18:
WARNING - 16:58:18: Optimization found no feasible point ! The least infeasible point is selected.
INFO - 16:58:18:
INFO - 16:58:18: Optimization result:
INFO - 16:58:18: Optimizer info:
INFO - 16:58:18: Status: 8
INFO - 16:58:18: Message: Positive directional derivative for linesearch
INFO - 16:58:18: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:18: Solution:
WARNING - 16:58:18: The solution is not feasible.
INFO - 16:58:18: Objective: -8.048531356594482
INFO - 16:58:18: Standardized constraints:
INFO - 16:58:18: g_2 = 0.00010868677020314799
INFO - 16:58:18: Design space:
INFO - 16:58:18: +------+-------------+-------+-------------+-------+
INFO - 16:58:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:18: +------+-------------+-------+-------------+-------+
INFO - 16:58:18: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:18: +------+-------------+-------+-------------+-------+
INFO - 16:58:18: *** End AerodynamicsScenario execution (time: 0:00:00.006811) ***
INFO - 16:58:18:
INFO - 16:58:18: *** Start StructureScenario execution ***
INFO - 16:58:18: StructureScenario
INFO - 16:58:18: Disciplines: SobieskiStructure
INFO - 16:58:18: MDO formulation: DisciplinaryOpt
INFO - 16:58:18: Optimization problem:
INFO - 16:58:18: minimize -y_11(x_1) = -y_11(x_1)
INFO - 16:58:18: with respect to x_1
INFO - 16:58:18: subject to constraints:
INFO - 16:58:18: g_1(x_1) <= 0.0
INFO - 16:58:18: over the design space:
INFO - 16:58:18: +--------+-------------+-------+-------------+-------+
INFO - 16:58:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:18: +--------+-------------+-------+-------------+-------+
INFO - 16:58:18: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:58:18: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:18: +--------+-------------+-------+-------------+-------+
INFO - 16:58:18: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:18: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:18:
INFO - 16:58:18: ... 3%|▎ | 1/30 [00:00<00:00, 649.98 it/sec, obj=-.564]
INFO - 16:58:18:
INFO - 16:58:18:
INFO - 16:58:18: Optimization result:
INFO - 16:58:18: Optimizer info:
INFO - 16:58:18: Status: 8
INFO - 16:58:18: Message: Positive directional derivative for linesearch
INFO - 16:58:18: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:18: Solution:
INFO - 16:58:18: The solution is feasible.
INFO - 16:58:18: Objective: -0.5638702395329327
INFO - 16:58:18: Standardized constraints:
INFO - 16:58:18: g_1 = [-0.0187341 -0.03388105 -0.04468266 -0.05219662 -0.05763635 -0.13672714
INFO - 16:58:18: -0.10327286]
INFO - 16:58:18: Design space:
INFO - 16:58:18: +--------+-------------+-------+-------------+-------+
INFO - 16:58:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:18: +--------+-------------+-------+-------------+-------+
INFO - 16:58:18: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:58:18: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:18: +--------+-------------+-------+-------------+-------+
INFO - 16:58:18: *** End StructureScenario execution (time: 0:00:00.009444) ***
INFO - 16:58:18: ... 86%|████████▌ | 43/50 [00:08<00:01, 5.02 it/sec, obj=-3.94e+3]
INFO - 16:58:18:
INFO - 16:58:18: *** Start PropulsionScenario execution ***
INFO - 16:58:18: PropulsionScenario
INFO - 16:58:18: Disciplines: SobieskiPropulsion
INFO - 16:58:18: MDO formulation: DisciplinaryOpt
INFO - 16:58:18: Optimization problem:
INFO - 16:58:18: minimize y_34(x_3)
INFO - 16:58:18: with respect to x_3
INFO - 16:58:18: subject to constraints:
INFO - 16:58:18: g_3(x_3) <= 0.0
INFO - 16:58:18: over the design space:
INFO - 16:58:18: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:18: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:18: | x_3 | 0.1 | 0.1565774099863879 | 1 | float |
INFO - 16:58:18: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:18: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:18: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:18:
INFO - 16:58:18: ... 3%|▎ | 1/30 [00:00<00:00, 2264.74 it/sec, obj=0.927]
INFO - 16:58:18:
INFO - 16:58:18: ... 7%|▋ | 2/30 [00:00<00:00, 531.90 it/sec, obj=0.927]
INFO - 16:58:18:
INFO - 16:58:18:
INFO - 16:58:18: Optimization result:
INFO - 16:58:18: Optimizer info:
INFO - 16:58:18: Status: 8
INFO - 16:58:18: Message: Positive directional derivative for linesearch
INFO - 16:58:18: Number of calls to the objective function by the optimizer: 3
INFO - 16:58:18: Solution:
INFO - 16:58:18: The solution is feasible.
INFO - 16:58:18: Objective: 0.9265749542458172
INFO - 16:58:18: Standardized constraints:
INFO - 16:58:18: g_3 = [-7.66201860e-01 -2.33798140e-01 2.22044605e-16 -1.83241144e-01]
INFO - 16:58:18: Design space:
INFO - 16:58:18: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:18: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:18: | x_3 | 0.1 | 0.1570512420825773 | 1 | float |
INFO - 16:58:18: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:18: *** End PropulsionScenario execution (time: 0:00:00.013784) ***
INFO - 16:58:18:
INFO - 16:58:18: *** Start AerodynamicsScenario execution ***
INFO - 16:58:18: AerodynamicsScenario
INFO - 16:58:18: Disciplines: SobieskiAerodynamics
INFO - 16:58:18: MDO formulation: DisciplinaryOpt
INFO - 16:58:18: Optimization problem:
INFO - 16:58:18: minimize -y_24(x_2) = -y_24(x_2)
INFO - 16:58:18: with respect to x_2
INFO - 16:58:18: subject to constraints:
INFO - 16:58:18: g_2(x_2) <= 0.0
INFO - 16:58:18: over the design space:
INFO - 16:58:18: +------+-------------+-------+-------------+-------+
INFO - 16:58:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:18: +------+-------------+-------+-------------+-------+
INFO - 16:58:18: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:18: +------+-------------+-------+-------------+-------+
INFO - 16:58:18: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:18: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:18:
INFO - 16:58:18: ... 3%|▎ | 1/30 [00:00<00:00, 1175.86 it/sec, obj=-8.01]
INFO - 16:58:18:
INFO - 16:58:18:
INFO - 16:58:18: Optimization result:
INFO - 16:58:18: Optimizer info:
INFO - 16:58:18: Status: 8
INFO - 16:58:18: Message: Positive directional derivative for linesearch
INFO - 16:58:18: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:18: Solution:
INFO - 16:58:18: The solution is feasible.
INFO - 16:58:18: Objective: -8.012211216461205
INFO - 16:58:18: Standardized constraints:
INFO - 16:58:18: g_2 = -5.75962944404651e-06
INFO - 16:58:18: Design space:
INFO - 16:58:18: +------+-------------+-------+-------------+-------+
INFO - 16:58:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:18: +------+-------------+-------+-------------+-------+
INFO - 16:58:18: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:18: +------+-------------+-------+-------------+-------+
INFO - 16:58:18: *** End AerodynamicsScenario execution (time: 0:00:00.006730) ***
INFO - 16:58:18:
INFO - 16:58:18: *** Start StructureScenario execution ***
INFO - 16:58:18: StructureScenario
INFO - 16:58:18: Disciplines: SobieskiStructure
INFO - 16:58:18: MDO formulation: DisciplinaryOpt
INFO - 16:58:18: Optimization problem:
INFO - 16:58:18: minimize -y_11(x_1) = -y_11(x_1)
INFO - 16:58:18: with respect to x_1
INFO - 16:58:18: subject to constraints:
INFO - 16:58:18: g_1(x_1) <= 0.0
INFO - 16:58:18: over the design space:
INFO - 16:58:18: +--------+-------------+-------+-------------+-------+
INFO - 16:58:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:18: +--------+-------------+-------+-------------+-------+
INFO - 16:58:18: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:58:18: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:18: +--------+-------------+-------+-------------+-------+
INFO - 16:58:18: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:18: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:18:
INFO - 16:58:18: ... 3%|▎ | 1/30 [00:00<00:00, 624.34 it/sec, obj=-.566]
INFO - 16:58:18:
INFO - 16:58:18:
INFO - 16:58:18: Optimization result:
INFO - 16:58:18: Optimizer info:
INFO - 16:58:18: Status: 8
INFO - 16:58:18: Message: Positive directional derivative for linesearch
INFO - 16:58:18: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:18: Solution:
INFO - 16:58:18: The solution is feasible.
INFO - 16:58:18: Objective: -0.5661964025287682
INFO - 16:58:18: Standardized constraints:
INFO - 16:58:18: g_1 = [-0.01803357 -0.03332668 -0.04423412 -0.05182207 -0.05731548 -0.13720852
INFO - 16:58:18: -0.10279148]
INFO - 16:58:18: Design space:
INFO - 16:58:18: +--------+-------------+-------+-------------+-------+
INFO - 16:58:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:18: +--------+-------------+-------+-------------+-------+
INFO - 16:58:18: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:58:18: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:18: +--------+-------------+-------+-------------+-------+
INFO - 16:58:18: *** End StructureScenario execution (time: 0:00:00.009431) ***
INFO - 16:58:18: ... 88%|████████▊ | 44/50 [00:08<00:01, 5.05 it/sec, obj=-3.93e+3]
INFO - 16:58:19:
INFO - 16:58:19: *** Start PropulsionScenario execution ***
INFO - 16:58:19: PropulsionScenario
INFO - 16:58:19: Disciplines: SobieskiPropulsion
INFO - 16:58:19: MDO formulation: DisciplinaryOpt
INFO - 16:58:19: Optimization problem:
INFO - 16:58:19: minimize y_34(x_3)
INFO - 16:58:19: with respect to x_3
INFO - 16:58:19: subject to constraints:
INFO - 16:58:19: g_3(x_3) <= 0.0
INFO - 16:58:19: over the design space:
INFO - 16:58:19: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:19: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:19: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:19: | x_3 | 0.1 | 0.1570512420825773 | 1 | float |
INFO - 16:58:19: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:19: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:19: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:19:
INFO - 16:58:19: ... 3%|▎ | 1/30 [00:00<00:00, 1404.66 it/sec, obj=0.925]
INFO - 16:58:19:
INFO - 16:58:19: ... 7%|▋ | 2/30 [00:00<00:00, 497.52 it/sec, obj=0.925]
INFO - 16:58:19:
INFO - 16:58:19: ... 10%|█ | 3/30 [00:00<00:00, 567.08 it/sec, obj=0.925]
INFO - 16:58:19:
INFO - 16:58:19: ... 13%|█▎ | 4/30 [00:00<00:00, 477.70 it/sec, obj=0.925]
INFO - 16:58:19:
INFO - 16:58:19:
INFO - 16:58:19: Optimization result:
INFO - 16:58:19: Optimizer info:
INFO - 16:58:19: Status: 8
INFO - 16:58:19: Message: Positive directional derivative for linesearch
INFO - 16:58:19: Number of calls to the objective function by the optimizer: 5
INFO - 16:58:19: Solution:
INFO - 16:58:19: The solution is feasible.
INFO - 16:58:19: Objective: 0.9252842826577585
INFO - 16:58:19: Standardized constraints:
INFO - 16:58:19: g_3 = [-0.76658748 -0.23341252 0. -0.18321146]
INFO - 16:58:19: Design space:
INFO - 16:58:19: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:19: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:19: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:19: | x_3 | 0.1 | 0.1566230570221241 | 1 | float |
INFO - 16:58:19: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:19: *** End PropulsionScenario execution (time: 0:00:00.014008) ***
INFO - 16:58:19:
INFO - 16:58:19: *** Start AerodynamicsScenario execution ***
INFO - 16:58:19: AerodynamicsScenario
INFO - 16:58:19: Disciplines: SobieskiAerodynamics
INFO - 16:58:19: MDO formulation: DisciplinaryOpt
INFO - 16:58:19: Optimization problem:
INFO - 16:58:19: minimize -y_24(x_2) = -y_24(x_2)
INFO - 16:58:19: with respect to x_2
INFO - 16:58:19: subject to constraints:
INFO - 16:58:19: g_2(x_2) <= 0.0
INFO - 16:58:19: over the design space:
INFO - 16:58:19: +------+-------------+-------+-------------+-------+
INFO - 16:58:19: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:19: +------+-------------+-------+-------------+-------+
INFO - 16:58:19: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:19: +------+-------------+-------+-------------+-------+
INFO - 16:58:19: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:19: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:19:
INFO - 16:58:19: ... 3%|▎ | 1/30 [00:00<00:00, 1050.94 it/sec, obj=-8.03]
INFO - 16:58:19:
INFO - 16:58:19:
INFO - 16:58:19: Optimization result:
INFO - 16:58:19: Optimizer info:
INFO - 16:58:19: Status: 8
INFO - 16:58:19: Message: Positive directional derivative for linesearch
INFO - 16:58:19: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:19: Solution:
INFO - 16:58:19: The solution is feasible.
INFO - 16:58:19: Objective: -8.028609222730832
INFO - 16:58:19: Standardized constraints:
INFO - 16:58:19: g_2 = -1.692280839238336e-06
INFO - 16:58:19: Design space:
INFO - 16:58:19: +------+-------------+-------+-------------+-------+
INFO - 16:58:19: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:19: +------+-------------+-------+-------------+-------+
INFO - 16:58:19: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:19: +------+-------------+-------+-------------+-------+
INFO - 16:58:19: *** End AerodynamicsScenario execution (time: 0:00:00.006685) ***
INFO - 16:58:19:
INFO - 16:58:19: *** Start StructureScenario execution ***
INFO - 16:58:19: StructureScenario
INFO - 16:58:19: Disciplines: SobieskiStructure
INFO - 16:58:19: MDO formulation: DisciplinaryOpt
INFO - 16:58:19: Optimization problem:
INFO - 16:58:19: minimize -y_11(x_1) = -y_11(x_1)
INFO - 16:58:19: with respect to x_1
INFO - 16:58:19: subject to constraints:
INFO - 16:58:19: g_1(x_1) <= 0.0
INFO - 16:58:19: over the design space:
INFO - 16:58:19: +--------+-------------+-------+-------------+-------+
INFO - 16:58:19: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:19: +--------+-------------+-------+-------------+-------+
INFO - 16:58:19: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:58:19: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:19: +--------+-------------+-------+-------------+-------+
INFO - 16:58:19: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:19: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:19:
INFO - 16:58:19: ... 3%|▎ | 1/30 [00:00<00:00, 703.15 it/sec, obj=-.566]
INFO - 16:58:19:
INFO - 16:58:19:
INFO - 16:58:19: Optimization result:
INFO - 16:58:19: Optimizer info:
INFO - 16:58:19: Status: 8
INFO - 16:58:19: Message: Positive directional derivative for linesearch
INFO - 16:58:19: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:19: Solution:
INFO - 16:58:19: The solution is feasible.
INFO - 16:58:19: Objective: -0.5661618760219563
INFO - 16:58:19: Standardized constraints:
INFO - 16:58:19: g_1 = [-0.01804539 -0.0333351 -0.04424064 -0.05182738 -0.05731997 -0.13720921
INFO - 16:58:19: -0.10279079]
INFO - 16:58:19: Design space:
INFO - 16:58:19: +--------+-------------+-------+-------------+-------+
INFO - 16:58:19: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:19: +--------+-------------+-------+-------------+-------+
INFO - 16:58:19: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:58:19: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:19: +--------+-------------+-------+-------------+-------+
INFO - 16:58:19: *** End StructureScenario execution (time: 0:00:00.009522) ***
INFO - 16:58:19: ... 90%|█████████ | 45/50 [00:08<00:00, 5.09 it/sec, obj=-3.95e+3]
INFO - 16:58:19:
INFO - 16:58:19: *** Start PropulsionScenario execution ***
INFO - 16:58:19: PropulsionScenario
INFO - 16:58:19: Disciplines: SobieskiPropulsion
INFO - 16:58:19: MDO formulation: DisciplinaryOpt
INFO - 16:58:19: Optimization problem:
INFO - 16:58:19: minimize y_34(x_3)
INFO - 16:58:19: with respect to x_3
INFO - 16:58:19: subject to constraints:
INFO - 16:58:19: g_3(x_3) <= 0.0
INFO - 16:58:19: over the design space:
INFO - 16:58:19: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:19: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:19: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:19: | x_3 | 0.1 | 0.1566230570221241 | 1 | float |
INFO - 16:58:19: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:19: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:19: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:19:
INFO - 16:58:19: ... 3%|▎ | 1/30 [00:00<00:00, 2236.96 it/sec, obj=0.925]
INFO - 16:58:19:
INFO - 16:58:19: ... 7%|▋ | 2/30 [00:00<00:00, 541.38 it/sec, obj=0.925]
INFO - 16:58:19:
INFO - 16:58:19: ... 10%|█ | 3/30 [00:00<00:00, 592.00 it/sec, obj=0.925]
INFO - 16:58:19:
INFO - 16:58:19: ... 13%|█▎ | 4/30 [00:00<00:00, 490.50 it/sec, obj=0.925]
INFO - 16:58:19:
INFO - 16:58:19:
INFO - 16:58:19: Optimization result:
INFO - 16:58:19: Optimizer info:
INFO - 16:58:19: Status: 8
INFO - 16:58:19: Message: Positive directional derivative for linesearch
INFO - 16:58:19: Number of calls to the objective function by the optimizer: 5
INFO - 16:58:19: Solution:
INFO - 16:58:19: The solution is feasible.
INFO - 16:58:19: Objective: 0.9253705666570003
INFO - 16:58:19: Standardized constraints:
INFO - 16:58:19: g_3 = [-0.76651886 -0.23348114 0. -0.18303757]
INFO - 16:58:19: Design space:
INFO - 16:58:19: +------+-------------+-------------------+-------------+-------+
INFO - 16:58:19: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:19: +------+-------------+-------------------+-------------+-------+
INFO - 16:58:19: | x_3 | 0.1 | 0.156500263376692 | 1 | float |
INFO - 16:58:19: +------+-------------+-------------------+-------------+-------+
INFO - 16:58:19: *** End PropulsionScenario execution (time: 0:00:00.013966) ***
INFO - 16:58:19:
INFO - 16:58:19: *** Start AerodynamicsScenario execution ***
INFO - 16:58:19: AerodynamicsScenario
INFO - 16:58:19: Disciplines: SobieskiAerodynamics
INFO - 16:58:19: MDO formulation: DisciplinaryOpt
INFO - 16:58:19: Optimization problem:
INFO - 16:58:19: minimize -y_24(x_2) = -y_24(x_2)
INFO - 16:58:19: with respect to x_2
INFO - 16:58:19: subject to constraints:
INFO - 16:58:19: g_2(x_2) <= 0.0
INFO - 16:58:19: over the design space:
INFO - 16:58:19: +------+-------------+-------+-------------+-------+
INFO - 16:58:19: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:19: +------+-------------+-------+-------------+-------+
INFO - 16:58:19: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:19: +------+-------------+-------+-------------+-------+
INFO - 16:58:19: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:19: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:19:
INFO - 16:58:19: ... 3%|▎ | 1/30 [00:00<00:00, 1177.84 it/sec, obj=-8.04]
INFO - 16:58:19:
INFO - 16:58:19:
INFO - 16:58:19: Optimization result:
INFO - 16:58:19: Optimizer info:
INFO - 16:58:19: Status: 8
INFO - 16:58:19: Message: Positive directional derivative for linesearch
INFO - 16:58:19: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:19: Solution:
INFO - 16:58:19: The solution is feasible.
INFO - 16:58:19: Objective: -8.036991919436055
INFO - 16:58:19: Standardized constraints:
INFO - 16:58:19: g_2 = -6.233009075096163e-06
INFO - 16:58:19: Design space:
INFO - 16:58:19: +------+-------------+-------+-------------+-------+
INFO - 16:58:19: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:19: +------+-------------+-------+-------------+-------+
INFO - 16:58:19: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:19: +------+-------------+-------+-------------+-------+
INFO - 16:58:19: *** End AerodynamicsScenario execution (time: 0:00:00.006711) ***
INFO - 16:58:19:
INFO - 16:58:19: *** Start StructureScenario execution ***
INFO - 16:58:19: StructureScenario
INFO - 16:58:19: Disciplines: SobieskiStructure
INFO - 16:58:19: MDO formulation: DisciplinaryOpt
INFO - 16:58:19: Optimization problem:
INFO - 16:58:19: minimize -y_11(x_1) = -y_11(x_1)
INFO - 16:58:19: with respect to x_1
INFO - 16:58:19: subject to constraints:
INFO - 16:58:19: g_1(x_1) <= 0.0
INFO - 16:58:19: over the design space:
INFO - 16:58:19: +--------+-------------+-------+-------------+-------+
INFO - 16:58:19: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:19: +--------+-------------+-------+-------------+-------+
INFO - 16:58:19: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:58:19: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:19: +--------+-------------+-------+-------------+-------+
INFO - 16:58:19: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:19: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:19:
INFO - 16:58:19: ... 3%|▎ | 1/30 [00:00<00:00, 607.96 it/sec, obj=-.566]
INFO - 16:58:19:
INFO - 16:58:19:
INFO - 16:58:19: Optimization result:
INFO - 16:58:19: Optimizer info:
INFO - 16:58:19: Status: 8
INFO - 16:58:19: Message: Positive directional derivative for linesearch
INFO - 16:58:19: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:19: Solution:
INFO - 16:58:19: The solution is feasible.
INFO - 16:58:19: Objective: -0.5661601157335268
INFO - 16:58:19: Standardized constraints:
INFO - 16:58:19: g_1 = [-0.0180369 -0.03332974 -0.04423673 -0.05182431 -0.05731744 -0.13720205
INFO - 16:58:19: -0.10279795]
INFO - 16:58:19: Design space:
INFO - 16:58:19: +--------+-------------+-------+-------------+-------+
INFO - 16:58:19: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:19: +--------+-------------+-------+-------------+-------+
INFO - 16:58:19: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:58:19: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:19: +--------+-------------+-------+-------------+-------+
INFO - 16:58:19: *** End StructureScenario execution (time: 0:00:00.009463) ***
INFO - 16:58:19: ... 92%|█████████▏| 46/50 [00:08<00:00, 5.13 it/sec, obj=-3.95e+3]
INFO - 16:58:19:
INFO - 16:58:19: *** Start PropulsionScenario execution ***
INFO - 16:58:19: PropulsionScenario
INFO - 16:58:19: Disciplines: SobieskiPropulsion
INFO - 16:58:19: MDO formulation: DisciplinaryOpt
INFO - 16:58:19: Optimization problem:
INFO - 16:58:19: minimize y_34(x_3)
INFO - 16:58:19: with respect to x_3
INFO - 16:58:19: subject to constraints:
INFO - 16:58:19: g_3(x_3) <= 0.0
INFO - 16:58:19: over the design space:
INFO - 16:58:19: +------+-------------+-------------------+-------------+-------+
INFO - 16:58:19: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:19: +------+-------------+-------------------+-------------+-------+
INFO - 16:58:19: | x_3 | 0.1 | 0.156500263376692 | 1 | float |
INFO - 16:58:19: +------+-------------+-------------------+-------------+-------+
INFO - 16:58:19: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:19: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:19:
INFO - 16:58:19: ... 3%|▎ | 1/30 [00:00<00:00, 1999.19 it/sec, obj=0.928]
INFO - 16:58:19:
INFO - 16:58:19: ... 7%|▋ | 2/30 [00:00<00:00, 477.17 it/sec, obj=0.928]
INFO - 16:58:19:
INFO - 16:58:19: ... 10%|█ | 3/30 [00:00<00:00, 444.05 it/sec, obj=0.928]
INFO - 16:58:19:
INFO - 16:58:19:
INFO - 16:58:19: Optimization result:
INFO - 16:58:19: Optimizer info:
INFO - 16:58:19: Status: 8
INFO - 16:58:19: Message: Positive directional derivative for linesearch
INFO - 16:58:19: Number of calls to the objective function by the optimizer: 4
INFO - 16:58:19: Solution:
INFO - 16:58:19: The solution is feasible.
INFO - 16:58:19: Objective: 0.927630671709175
INFO - 16:58:19: Standardized constraints:
INFO - 16:58:19: g_3 = [-7.65564255e-01 -2.34435745e-01 2.22044605e-16 -1.82978904e-01]
INFO - 16:58:19: Design space:
INFO - 16:58:19: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:19: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:19: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:19: | x_3 | 0.1 | 0.1571538993032196 | 1 | float |
INFO - 16:58:19: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:19: *** End PropulsionScenario execution (time: 0:00:00.012530) ***
INFO - 16:58:19:
INFO - 16:58:19: *** Start AerodynamicsScenario execution ***
INFO - 16:58:19: AerodynamicsScenario
INFO - 16:58:19: Disciplines: SobieskiAerodynamics
INFO - 16:58:19: MDO formulation: DisciplinaryOpt
INFO - 16:58:19: Optimization problem:
INFO - 16:58:19: minimize -y_24(x_2) = -y_24(x_2)
INFO - 16:58:19: with respect to x_2
INFO - 16:58:19: subject to constraints:
INFO - 16:58:19: g_2(x_2) <= 0.0
INFO - 16:58:19: over the design space:
INFO - 16:58:19: +------+-------------+-------+-------------+-------+
INFO - 16:58:19: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:19: +------+-------------+-------+-------------+-------+
INFO - 16:58:19: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:19: +------+-------------+-------+-------------+-------+
INFO - 16:58:19: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:19: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:19:
INFO - 16:58:19: ... 3%|▎ | 1/30 [00:00<00:00, 1006.31 it/sec, obj=-8]
INFO - 16:58:19:
INFO - 16:58:19:
INFO - 16:58:19: Optimization result:
INFO - 16:58:19: Optimizer info:
INFO - 16:58:19: Status: 8
INFO - 16:58:19: Message: Positive directional derivative for linesearch
INFO - 16:58:19: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:19: Solution:
INFO - 16:58:19: The solution is feasible.
INFO - 16:58:19: Objective: -8.003513692649545
INFO - 16:58:19: Standardized constraints:
INFO - 16:58:19: g_2 = -6.291536633895589e-07
INFO - 16:58:19: Design space:
INFO - 16:58:19: +------+-------------+-------+-------------+-------+
INFO - 16:58:19: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:19: +------+-------------+-------+-------------+-------+
INFO - 16:58:19: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:19: +------+-------------+-------+-------------+-------+
INFO - 16:58:19: *** End AerodynamicsScenario execution (time: 0:00:00.006698) ***
INFO - 16:58:19:
INFO - 16:58:19: *** Start StructureScenario execution ***
INFO - 16:58:19: StructureScenario
INFO - 16:58:19: Disciplines: SobieskiStructure
INFO - 16:58:19: MDO formulation: DisciplinaryOpt
INFO - 16:58:19: Optimization problem:
INFO - 16:58:19: minimize -y_11(x_1) = -y_11(x_1)
INFO - 16:58:19: with respect to x_1
INFO - 16:58:19: subject to constraints:
INFO - 16:58:19: g_1(x_1) <= 0.0
INFO - 16:58:19: over the design space:
INFO - 16:58:19: +--------+-------------+-------+-------------+-------+
INFO - 16:58:19: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:19: +--------+-------------+-------+-------------+-------+
INFO - 16:58:19: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:58:19: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:19: +--------+-------------+-------+-------------+-------+
INFO - 16:58:19: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:19: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:19:
INFO - 16:58:19: ... 3%|▎ | 1/30 [00:00<00:00, 702.92 it/sec, obj=-.566]
INFO - 16:58:19:
INFO - 16:58:19:
INFO - 16:58:19: Optimization result:
INFO - 16:58:19: Optimizer info:
INFO - 16:58:19: Status: 8
INFO - 16:58:19: Message: Positive directional derivative for linesearch
INFO - 16:58:19: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:19: Solution:
INFO - 16:58:19: The solution is feasible.
INFO - 16:58:19: Objective: -0.5660369066932011
INFO - 16:58:19: Standardized constraints:
INFO - 16:58:19: g_1 = [-0.01805401 -0.03334207 -0.04424632 -0.05183215 -0.05732406 -0.13720188
INFO - 16:58:19: -0.10279812]
INFO - 16:58:19: Design space:
INFO - 16:58:19: +--------+-------------+-------+-------------+-------+
INFO - 16:58:19: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:19: +--------+-------------+-------+-------------+-------+
INFO - 16:58:19: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:58:19: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:19: +--------+-------------+-------+-------------+-------+
INFO - 16:58:19: *** End StructureScenario execution (time: 0:00:00.009486) ***
INFO - 16:58:19: ... 94%|█████████▍| 47/50 [00:09<00:00, 5.16 it/sec, obj=-3.92e+3]
INFO - 16:58:19:
INFO - 16:58:19: *** Start PropulsionScenario execution ***
INFO - 16:58:19: PropulsionScenario
INFO - 16:58:19: Disciplines: SobieskiPropulsion
INFO - 16:58:19: MDO formulation: DisciplinaryOpt
INFO - 16:58:19: Optimization problem:
INFO - 16:58:19: minimize y_34(x_3)
INFO - 16:58:19: with respect to x_3
INFO - 16:58:19: subject to constraints:
INFO - 16:58:19: g_3(x_3) <= 0.0
INFO - 16:58:19: over the design space:
INFO - 16:58:19: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:19: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:19: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:19: | x_3 | 0.1 | 0.1571538993032196 | 1 | float |
INFO - 16:58:19: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:19: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:19: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:19:
INFO - 16:58:19: ... 3%|▎ | 1/30 [00:00<00:00, 2262.30 it/sec, obj=0.927]
INFO - 16:58:19:
INFO - 16:58:19: ... 7%|▋ | 2/30 [00:00<00:00, 488.90 it/sec, obj=0.927]
INFO - 16:58:19:
INFO - 16:58:19: ... 10%|█ | 3/30 [00:00<00:00, 421.52 it/sec, obj=0.927]
INFO - 16:58:19:
INFO - 16:58:19: ... 13%|█▎ | 4/30 [00:00<00:00, 454.88 it/sec, obj=0.927]
INFO - 16:58:19:
INFO - 16:58:19:
INFO - 16:58:19: Optimization result:
INFO - 16:58:19: Optimizer info:
INFO - 16:58:19: Status: None
INFO - 16:58:19: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:58:19: Number of calls to the objective function by the optimizer: 5
INFO - 16:58:19: Solution:
INFO - 16:58:19: The solution is feasible.
INFO - 16:58:19: Objective: 0.9273199412441269
INFO - 16:58:19: Standardized constraints:
INFO - 16:58:19: g_3 = [-0.76585596 -0.23414404 0. -0.1831054 ]
INFO - 16:58:19: Design space:
INFO - 16:58:19: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:19: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:19: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:19: | x_3 | 0.1 | 0.1571667144368612 | 1 | float |
INFO - 16:58:19: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:19: *** End PropulsionScenario execution (time: 0:00:00.013382) ***
INFO - 16:58:19:
INFO - 16:58:19: *** Start AerodynamicsScenario execution ***
INFO - 16:58:19: AerodynamicsScenario
INFO - 16:58:19: Disciplines: SobieskiAerodynamics
INFO - 16:58:19: MDO formulation: DisciplinaryOpt
INFO - 16:58:19: Optimization problem:
INFO - 16:58:19: minimize -y_24(x_2) = -y_24(x_2)
INFO - 16:58:19: with respect to x_2
INFO - 16:58:19: subject to constraints:
INFO - 16:58:19: g_2(x_2) <= 0.0
INFO - 16:58:19: over the design space:
INFO - 16:58:19: +------+-------------+-------+-------------+-------+
INFO - 16:58:19: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:19: +------+-------------+-------+-------------+-------+
INFO - 16:58:19: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:19: +------+-------------+-------+-------------+-------+
INFO - 16:58:19: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:19: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:19:
INFO - 16:58:19: ... 3%|▎ | 1/30 [00:00<00:00, 1173.56 it/sec, obj=-8]
INFO - 16:58:19:
INFO - 16:58:19:
INFO - 16:58:19: Optimization result:
INFO - 16:58:19: Optimizer info:
INFO - 16:58:19: Status: 8
INFO - 16:58:19: Message: Positive directional derivative for linesearch
INFO - 16:58:19: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:19: Solution:
INFO - 16:58:19: The solution is feasible.
INFO - 16:58:19: Objective: -7.998502715529113
INFO - 16:58:19: Standardized constraints:
INFO - 16:58:19: g_2 = -5.179176911784822e-06
INFO - 16:58:19: Design space:
INFO - 16:58:19: +------+-------------+-------+-------------+-------+
INFO - 16:58:19: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:19: +------+-------------+-------+-------------+-------+
INFO - 16:58:19: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:19: +------+-------------+-------+-------------+-------+
INFO - 16:58:19: *** End AerodynamicsScenario execution (time: 0:00:00.006685) ***
INFO - 16:58:19:
INFO - 16:58:19: *** Start StructureScenario execution ***
INFO - 16:58:19: StructureScenario
INFO - 16:58:19: Disciplines: SobieskiStructure
INFO - 16:58:19: MDO formulation: DisciplinaryOpt
INFO - 16:58:19: Optimization problem:
INFO - 16:58:19: minimize -y_11(x_1) = -y_11(x_1)
INFO - 16:58:19: with respect to x_1
INFO - 16:58:19: subject to constraints:
INFO - 16:58:19: g_1(x_1) <= 0.0
INFO - 16:58:19: over the design space:
INFO - 16:58:19: +--------+-------------+-------+-------------+-------+
INFO - 16:58:19: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:19: +--------+-------------+-------+-------------+-------+
INFO - 16:58:19: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:58:19: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:19: +--------+-------------+-------+-------------+-------+
INFO - 16:58:19: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:19: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:19:
INFO - 16:58:19: ... 3%|▎ | 1/30 [00:00<00:00, 698.58 it/sec, obj=-.566]
INFO - 16:58:19:
INFO - 16:58:19:
INFO - 16:58:19: Optimization result:
INFO - 16:58:19: Optimizer info:
INFO - 16:58:19: Status: 8
INFO - 16:58:19: Message: Positive directional derivative for linesearch
INFO - 16:58:19: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:19: Solution:
INFO - 16:58:19: The solution is feasible.
INFO - 16:58:19: Objective: -0.5660283655592219
INFO - 16:58:19: Standardized constraints:
INFO - 16:58:19: g_1 = [-0.01804227 -0.03333391 -0.04424008 -0.0518271 -0.05731982 -0.1371991
INFO - 16:58:19: -0.1028009 ]
INFO - 16:58:19: Design space:
INFO - 16:58:19: +--------+-------------+-------+-------------+-------+
INFO - 16:58:19: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:19: +--------+-------------+-------+-------------+-------+
INFO - 16:58:19: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:58:19: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:19: +--------+-------------+-------+-------------+-------+
INFO - 16:58:19: *** End StructureScenario execution (time: 0:00:00.009695) ***
INFO - 16:58:19: ... 96%|█████████▌| 48/50 [00:09<00:00, 5.19 it/sec, obj=-3.92e+3]
INFO - 16:58:19:
INFO - 16:58:19: *** Start PropulsionScenario execution ***
INFO - 16:58:19: PropulsionScenario
INFO - 16:58:19: Disciplines: SobieskiPropulsion
INFO - 16:58:19: MDO formulation: DisciplinaryOpt
INFO - 16:58:19: Optimization problem:
INFO - 16:58:19: minimize y_34(x_3)
INFO - 16:58:19: with respect to x_3
INFO - 16:58:19: subject to constraints:
INFO - 16:58:19: g_3(x_3) <= 0.0
INFO - 16:58:19: over the design space:
INFO - 16:58:19: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:19: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:19: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:19: | x_3 | 0.1 | 0.1571667144368612 | 1 | float |
INFO - 16:58:19: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:19: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:19: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:19:
INFO - 16:58:19: ... 3%|▎ | 1/30 [00:00<00:00, 2263.52 it/sec, obj=0.927]
INFO - 16:58:19:
INFO - 16:58:19: ... 7%|▋ | 2/30 [00:00<00:00, 529.48 it/sec, obj=0.927]
INFO - 16:58:19:
INFO - 16:58:19: ... 10%|█ | 3/30 [00:00<00:00, 582.22 it/sec, obj=0.927]
INFO - 16:58:19:
INFO - 16:58:19: ... 13%|█▎ | 4/30 [00:00<00:00, 493.87 it/sec, obj=0.927]
INFO - 16:58:19:
INFO - 16:58:19:
INFO - 16:58:19: Optimization result:
INFO - 16:58:19: Optimizer info:
INFO - 16:58:19: Status: 8
INFO - 16:58:19: Message: Positive directional derivative for linesearch
INFO - 16:58:19: Number of calls to the objective function by the optimizer: 5
INFO - 16:58:19: Solution:
INFO - 16:58:19: The solution is feasible.
INFO - 16:58:19: Objective: 0.9268305663967943
INFO - 16:58:19: Standardized constraints:
INFO - 16:58:19: g_3 = [-7.65787016e-01 -2.34212984e-01 2.22044605e-16 -1.82966803e-01]
INFO - 16:58:19: Design space:
INFO - 16:58:19: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:19: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:19: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:19: | x_3 | 0.1 | 0.1568923674733929 | 1 | float |
INFO - 16:58:19: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:19: *** End PropulsionScenario execution (time: 0:00:00.013647) ***
INFO - 16:58:19:
INFO - 16:58:19: *** Start AerodynamicsScenario execution ***
INFO - 16:58:19: AerodynamicsScenario
INFO - 16:58:19: Disciplines: SobieskiAerodynamics
INFO - 16:58:19: MDO formulation: DisciplinaryOpt
INFO - 16:58:19: Optimization problem:
INFO - 16:58:19: minimize -y_24(x_2) = -y_24(x_2)
INFO - 16:58:19: with respect to x_2
INFO - 16:58:19: subject to constraints:
INFO - 16:58:19: g_2(x_2) <= 0.0
INFO - 16:58:19: over the design space:
INFO - 16:58:19: +------+-------------+-------+-------------+-------+
INFO - 16:58:19: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:19: +------+-------------+-------+-------------+-------+
INFO - 16:58:19: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:19: +------+-------------+-------+-------------+-------+
INFO - 16:58:19: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:19: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:19:
INFO - 16:58:19: ... 3%|▎ | 1/30 [00:00<00:00, 1006.55 it/sec, obj=-8.01]
INFO - 16:58:19:
INFO - 16:58:19:
INFO - 16:58:19: Optimization result:
INFO - 16:58:19: Optimizer info:
INFO - 16:58:19: Status: 8
INFO - 16:58:19: Message: Positive directional derivative for linesearch
INFO - 16:58:19: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:19: Solution:
INFO - 16:58:19: The solution is feasible.
INFO - 16:58:19: Objective: -8.009669072862627
INFO - 16:58:19: Standardized constraints:
INFO - 16:58:19: g_2 = 8.262665905700572e-06
INFO - 16:58:19: Design space:
INFO - 16:58:19: +------+-------------+-------+-------------+-------+
INFO - 16:58:19: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:19: +------+-------------+-------+-------------+-------+
INFO - 16:58:19: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:19: +------+-------------+-------+-------------+-------+
INFO - 16:58:19: *** End AerodynamicsScenario execution (time: 0:00:00.011677) ***
INFO - 16:58:19:
INFO - 16:58:19: *** Start StructureScenario execution ***
INFO - 16:58:19: StructureScenario
INFO - 16:58:19: Disciplines: SobieskiStructure
INFO - 16:58:19: MDO formulation: DisciplinaryOpt
INFO - 16:58:19: Optimization problem:
INFO - 16:58:19: minimize -y_11(x_1) = -y_11(x_1)
INFO - 16:58:19: with respect to x_1
INFO - 16:58:19: subject to constraints:
INFO - 16:58:19: g_1(x_1) <= 0.0
INFO - 16:58:19: over the design space:
INFO - 16:58:19: +--------+-------------+-------+-------------+-------+
INFO - 16:58:19: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:19: +--------+-------------+-------+-------------+-------+
INFO - 16:58:19: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:58:19: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:19: +--------+-------------+-------+-------------+-------+
INFO - 16:58:19: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:19: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:19:
INFO - 16:58:19: ... 3%|▎ | 1/30 [00:00<00:00, 621.65 it/sec, obj=-.566]
INFO - 16:58:19:
INFO - 16:58:19:
INFO - 16:58:19: Optimization result:
INFO - 16:58:19: Optimizer info:
INFO - 16:58:19: Status: 8
INFO - 16:58:19: Message: Positive directional derivative for linesearch
INFO - 16:58:19: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:19: Solution:
INFO - 16:58:19: The solution is feasible.
INFO - 16:58:19: Objective: -0.5660220265385565
INFO - 16:58:19: Standardized constraints:
INFO - 16:58:19: g_1 = [-0.018076 -0.03335718 -0.04425783 -0.05184144 -0.05733185 -0.13720863
INFO - 16:58:19: -0.10279137]
INFO - 16:58:19: Design space:
INFO - 16:58:19: +--------+-------------+-------+-------------+-------+
INFO - 16:58:19: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:19: +--------+-------------+-------+-------------+-------+
INFO - 16:58:19: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:58:19: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:19: +--------+-------------+-------+-------------+-------+
INFO - 16:58:19: *** End StructureScenario execution (time: 0:00:00.009392) ***
INFO - 16:58:19: ... 98%|█████████▊| 49/50 [00:09<00:00, 5.22 it/sec, obj=-3.93e+3]
INFO - 16:58:19:
INFO - 16:58:19: *** Start PropulsionScenario execution ***
INFO - 16:58:19: PropulsionScenario
INFO - 16:58:19: Disciplines: SobieskiPropulsion
INFO - 16:58:19: MDO formulation: DisciplinaryOpt
INFO - 16:58:19: Optimization problem:
INFO - 16:58:19: minimize y_34(x_3)
INFO - 16:58:19: with respect to x_3
INFO - 16:58:19: subject to constraints:
INFO - 16:58:19: g_3(x_3) <= 0.0
INFO - 16:58:19: over the design space:
INFO - 16:58:19: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:19: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:19: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:19: | x_3 | 0.1 | 0.1568923674733929 | 1 | float |
INFO - 16:58:19: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:19: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:19: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:19:
INFO - 16:58:19: ... 3%|▎ | 1/30 [00:00<00:00, 2269.65 it/sec, obj=0.927]
INFO - 16:58:19:
INFO - 16:58:19: ... 7%|▋ | 2/30 [00:00<00:00, 545.46 it/sec, obj=0.927]
INFO - 16:58:19:
INFO - 16:58:19:
INFO - 16:58:19: Optimization result:
INFO - 16:58:19: Optimizer info:
INFO - 16:58:19: Status: 8
INFO - 16:58:19: Message: Positive directional derivative for linesearch
INFO - 16:58:19: Number of calls to the objective function by the optimizer: 3
INFO - 16:58:19: Solution:
INFO - 16:58:19: The solution is feasible.
INFO - 16:58:19: Objective: 0.926667167003816
INFO - 16:58:19: Standardized constraints:
INFO - 16:58:19: g_3 = [-7.66013978e-01 -2.33986022e-01 6.66133815e-16 -1.83079679e-01]
INFO - 16:58:19: Design space:
INFO - 16:58:19: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:19: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:19: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:19: | x_3 | 0.1 | 0.1569392770784233 | 1 | float |
INFO - 16:58:19: +------+-------------+--------------------+-------------+-------+
INFO - 16:58:19: *** End PropulsionScenario execution (time: 0:00:00.012710) ***
INFO - 16:58:19:
INFO - 16:58:19: *** Start AerodynamicsScenario execution ***
INFO - 16:58:19: AerodynamicsScenario
INFO - 16:58:19: Disciplines: SobieskiAerodynamics
INFO - 16:58:19: MDO formulation: DisciplinaryOpt
INFO - 16:58:19: Optimization problem:
INFO - 16:58:19: minimize -y_24(x_2) = -y_24(x_2)
INFO - 16:58:19: with respect to x_2
INFO - 16:58:19: subject to constraints:
INFO - 16:58:19: g_2(x_2) <= 0.0
INFO - 16:58:19: over the design space:
INFO - 16:58:19: +------+-------------+-------+-------------+-------+
INFO - 16:58:19: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:19: +------+-------------+-------+-------------+-------+
INFO - 16:58:19: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:19: +------+-------------+-------+-------------+-------+
INFO - 16:58:19: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:19: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:19:
INFO - 16:58:19: ... 3%|▎ | 1/30 [00:00<00:00, 1141.31 it/sec, obj=-8.01]
INFO - 16:58:19:
INFO - 16:58:19:
INFO - 16:58:19: Optimization result:
INFO - 16:58:19: Optimizer info:
INFO - 16:58:19: Status: 8
INFO - 16:58:19: Message: Positive directional derivative for linesearch
INFO - 16:58:19: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:19: Solution:
INFO - 16:58:19: The solution is feasible.
INFO - 16:58:19: Objective: -8.01208211597784
INFO - 16:58:19: Standardized constraints:
INFO - 16:58:19: g_2 = -2.921250889631466e-06
INFO - 16:58:19: Design space:
INFO - 16:58:19: +------+-------------+-------+-------------+-------+
INFO - 16:58:19: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:19: +------+-------------+-------+-------------+-------+
INFO - 16:58:19: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:19: +------+-------------+-------+-------------+-------+
INFO - 16:58:19: *** End AerodynamicsScenario execution (time: 0:00:00.006746) ***
INFO - 16:58:19:
INFO - 16:58:19: *** Start StructureScenario execution ***
INFO - 16:58:19: StructureScenario
INFO - 16:58:19: Disciplines: SobieskiStructure
INFO - 16:58:19: MDO formulation: DisciplinaryOpt
INFO - 16:58:19: Optimization problem:
INFO - 16:58:19: minimize -y_11(x_1) = -y_11(x_1)
INFO - 16:58:19: with respect to x_1
INFO - 16:58:19: subject to constraints:
INFO - 16:58:19: g_1(x_1) <= 0.0
INFO - 16:58:19: over the design space:
INFO - 16:58:19: +--------+-------------+-------+-------------+-------+
INFO - 16:58:19: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:19: +--------+-------------+-------+-------------+-------+
INFO - 16:58:19: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:58:19: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:19: +--------+-------------+-------+-------------+-------+
INFO - 16:58:19: Solving optimization problem with algorithm SLSQP:
INFO - 16:58:19: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:58:19:
INFO - 16:58:19: ... 3%|▎ | 1/30 [00:00<00:00, 595.19 it/sec, obj=-.566]
INFO - 16:58:19:
INFO - 16:58:19:
INFO - 16:58:19: Optimization result:
INFO - 16:58:19: Optimizer info:
INFO - 16:58:19: Status: 8
INFO - 16:58:19: Message: Positive directional derivative for linesearch
INFO - 16:58:19: Number of calls to the objective function by the optimizer: 2
INFO - 16:58:19: Solution:
INFO - 16:58:19: The solution is feasible.
INFO - 16:58:19: Objective: -0.5660690663143654
INFO - 16:58:19: Standardized constraints:
INFO - 16:58:19: g_1 = [-0.01804611 -0.03333625 -0.04424175 -0.05182839 -0.05732088 -0.13720318
INFO - 16:58:19: -0.10279682]
INFO - 16:58:19: Design space:
INFO - 16:58:19: +--------+-------------+-------+-------------+-------+
INFO - 16:58:19: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:19: +--------+-------------+-------+-------------+-------+
INFO - 16:58:19: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:58:19: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:58:19: +--------+-------------+-------+-------------+-------+
INFO - 16:58:19: *** End StructureScenario execution (time: 0:00:00.009478) ***
INFO - 16:58:19: ... 100%|██████████| 50/50 [00:09<00:00, 5.25 it/sec, obj=-3.93e+3]
INFO - 16:58:19: Optimization result:
INFO - 16:58:19: Optimizer info:
INFO - 16:58:19: Status: None
INFO - 16:58:19: Message: Maximum number of iterations reached. GEMSEO Stopped the driver
INFO - 16:58:19: Number of calls to the objective function by the optimizer: 52
INFO - 16:58:19: Solution:
INFO - 16:58:19: The solution is feasible.
INFO - 16:58:19: Objective: -3963.3800122701778
INFO - 16:58:19: Standardized constraints:
INFO - 16:58:19: g_1_g_2_g_3 = [-0.01805093 -0.03333915 -0.04424381 -0.05182998 -0.05732217 -0.13720865
INFO - 16:58:19: -0.10279135 0. -0.76718646 -0.23281354 0. -0.183255 ]
INFO - 16:58:19: Design space:
INFO - 16:58:19: +-------------+-------------+---------------------+-------------+-------+
INFO - 16:58:19: | name | lower_bound | value | upper_bound | type |
INFO - 16:58:19: +-------------+-------------+---------------------+-------------+-------+
INFO - 16:58:19: | x_shared[0] | 0.01 | 0.05999999999999998 | 0.09 | float |
INFO - 16:58:19: | x_shared[1] | 30000 | 60000 | 60000 | float |
INFO - 16:58:19: | x_shared[2] | 1.4 | 1.4 | 1.8 | float |
INFO - 16:58:19: | x_shared[3] | 2.5 | 2.5 | 8.5 | float |
INFO - 16:58:19: | x_shared[4] | 40 | 70 | 70 | float |
INFO - 16:58:19: | x_shared[5] | 500 | 1500 | 1500 | float |
INFO - 16:58:19: +-------------+-------------+---------------------+-------------+-------+
INFO - 16:58:19: *** End MDOScenario execution (time: 0:00:09.538151) ***
{'max_iter': 50, 'algo': 'NLOPT_COBYLA', 'algo_options': {'xtol_rel': 1e-07, 'xtol_abs': 1e-07, 'ftol_rel': 1e-07, 'ftol_abs': 1e-07, 'ineq_tolerance': 0.0001}}
Plot the history of the MDA residuals¶
For the first MDA:
system_scenario.formulation.mda1.plot_residual_history(save=False, show=True)
# For the second MDA:
system_scenario.formulation.mda2.plot_residual_history(save=False, show=True)
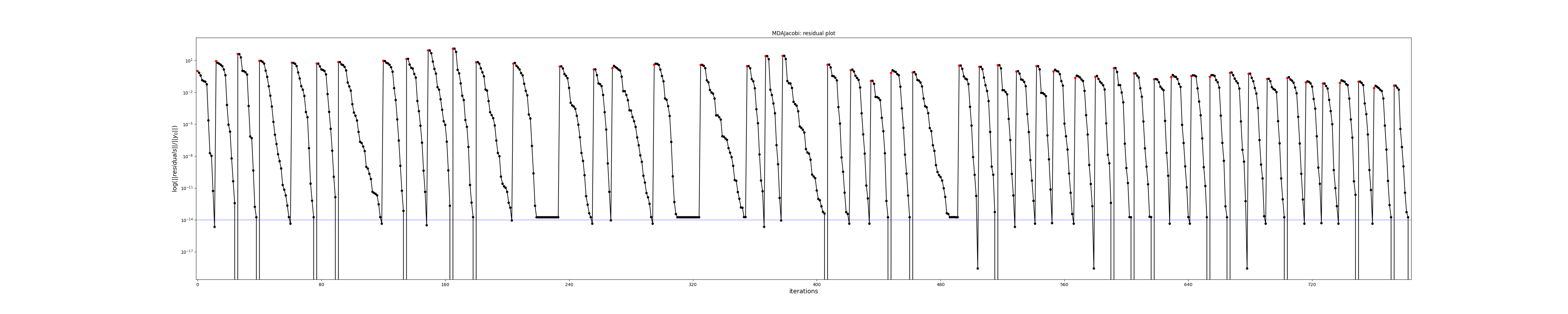
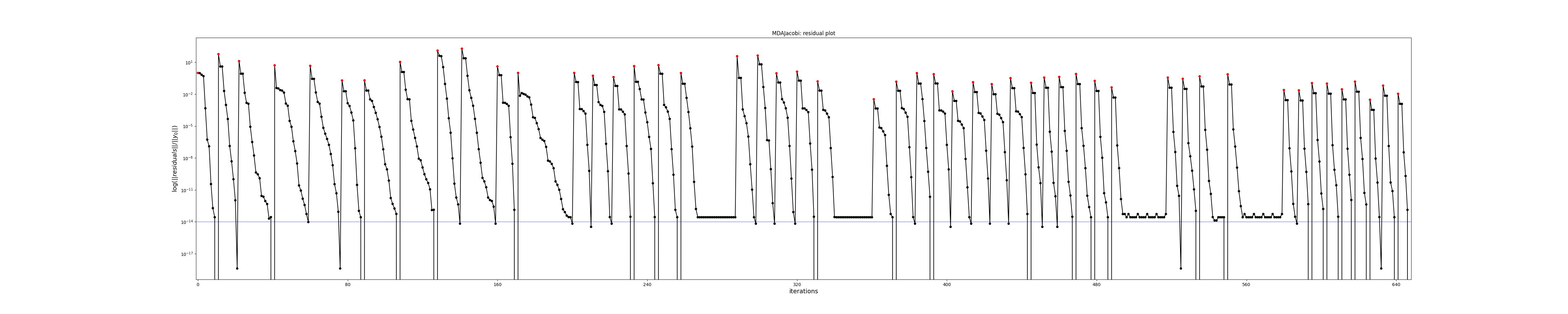
Plot the system optimization history view¶
system_scenario.post_process("OptHistoryView", save=False, show=True)
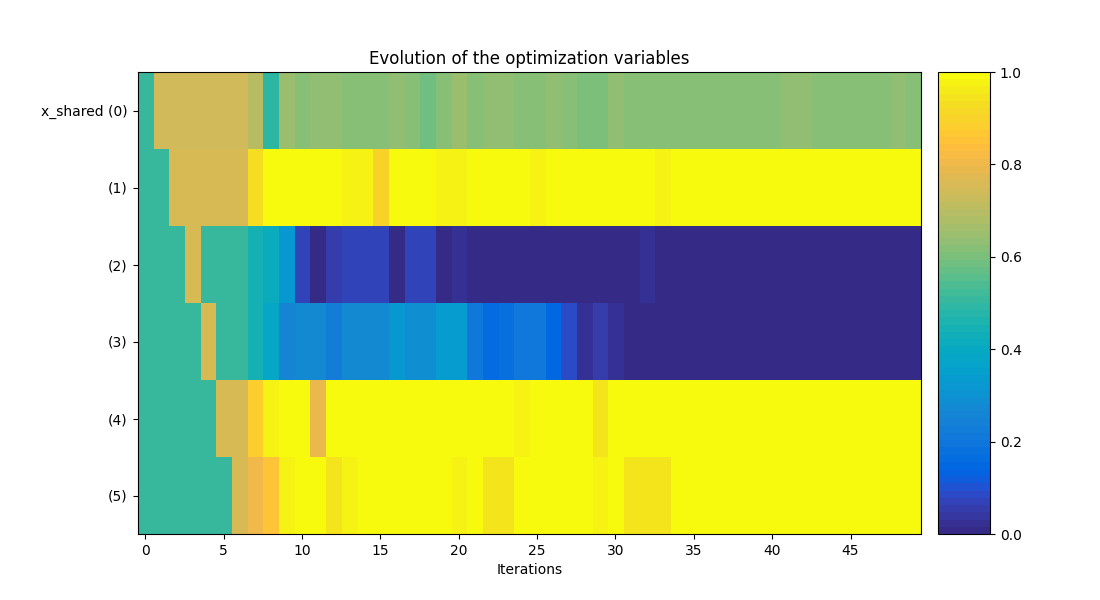
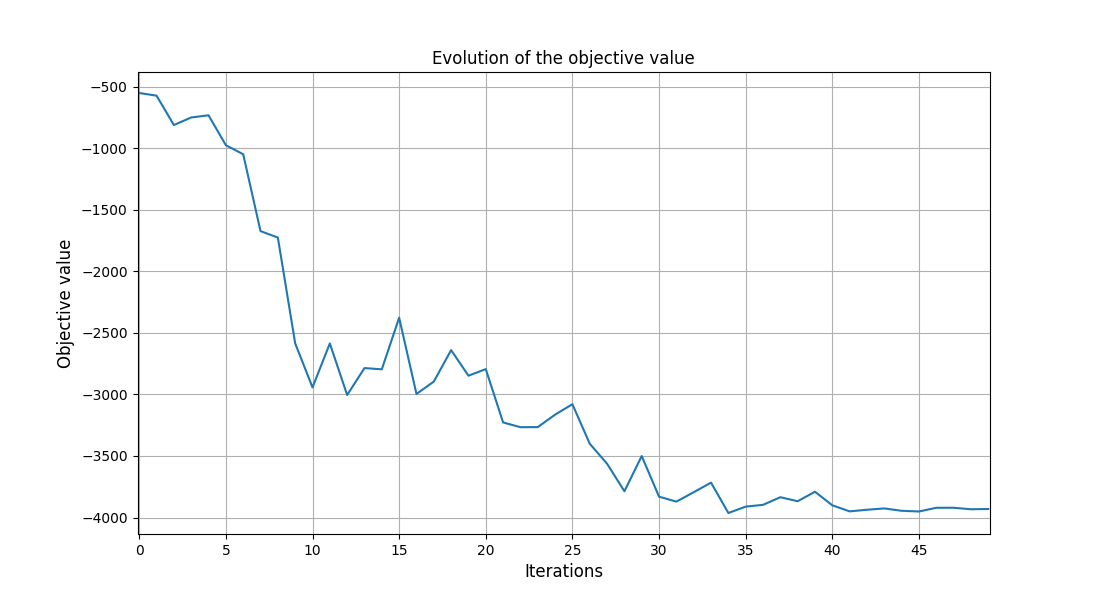
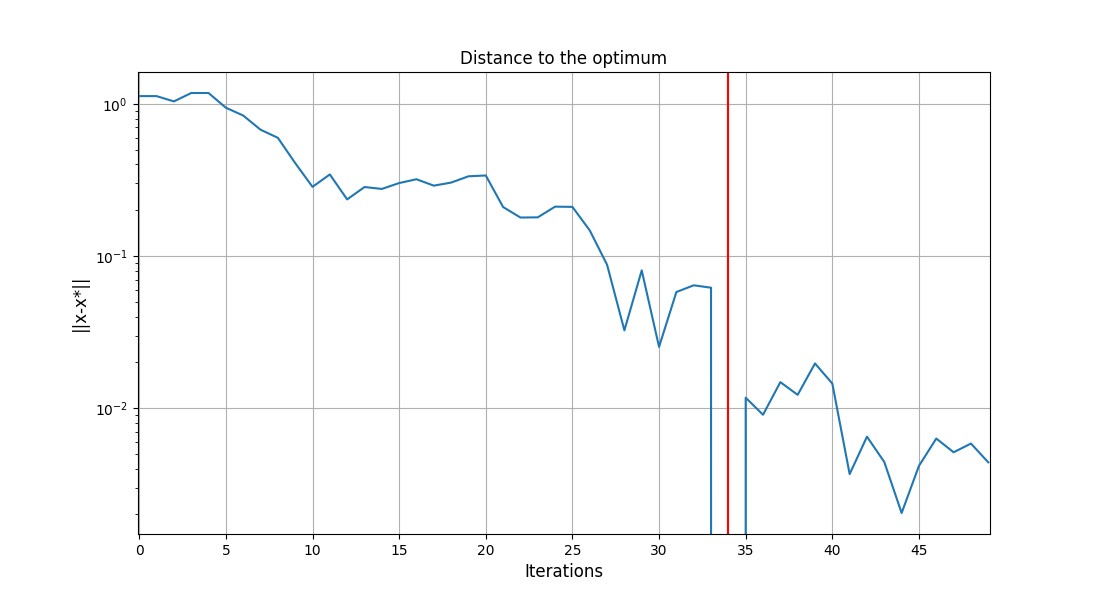
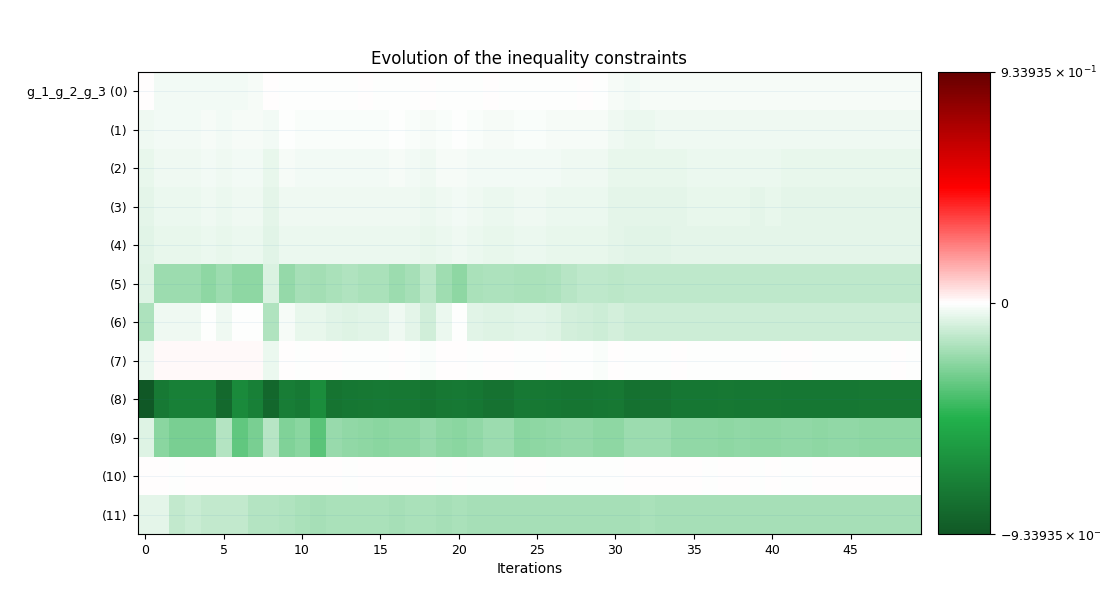
<gemseo.post.opt_history_view.OptHistoryView object at 0x7fbc39fe5400>
Plot the structure optimization histories of the 2 first iterations¶
struct_databases = system_scenario.formulation.scenario_adapters[2].databases
for database in struct_databases[:2]:
opt_problem = deepcopy(sc_str.formulation.opt_problem)
opt_problem.database = database
execute_post(opt_problem, "OptHistoryView", save=False, show=True)
for disc in [propu, aero, mission, struct]:
print(f"{disc.name}: {disc.n_calls} calls.")
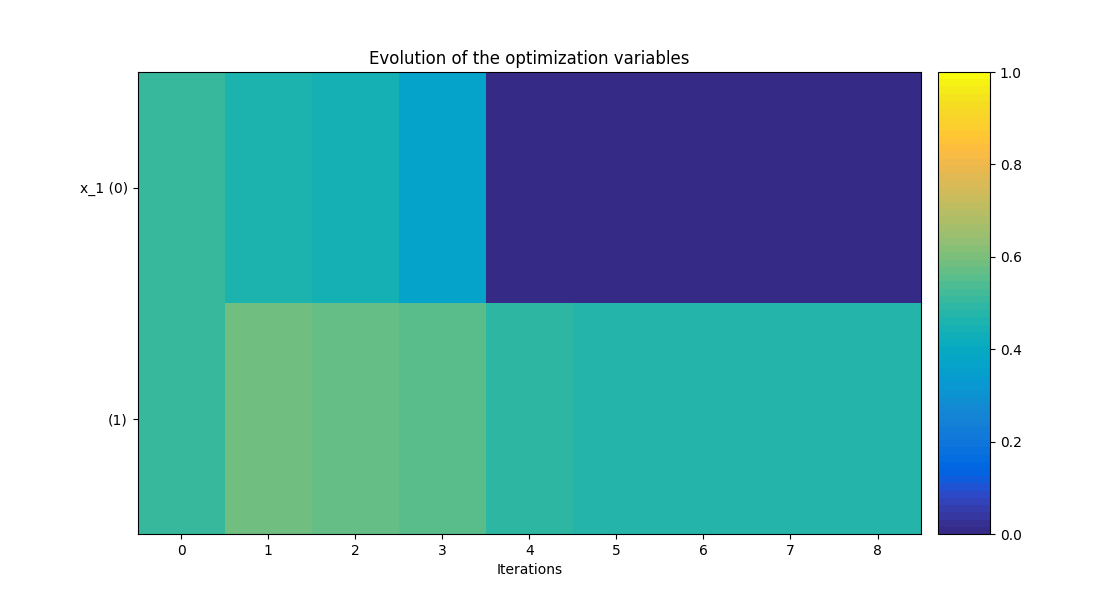
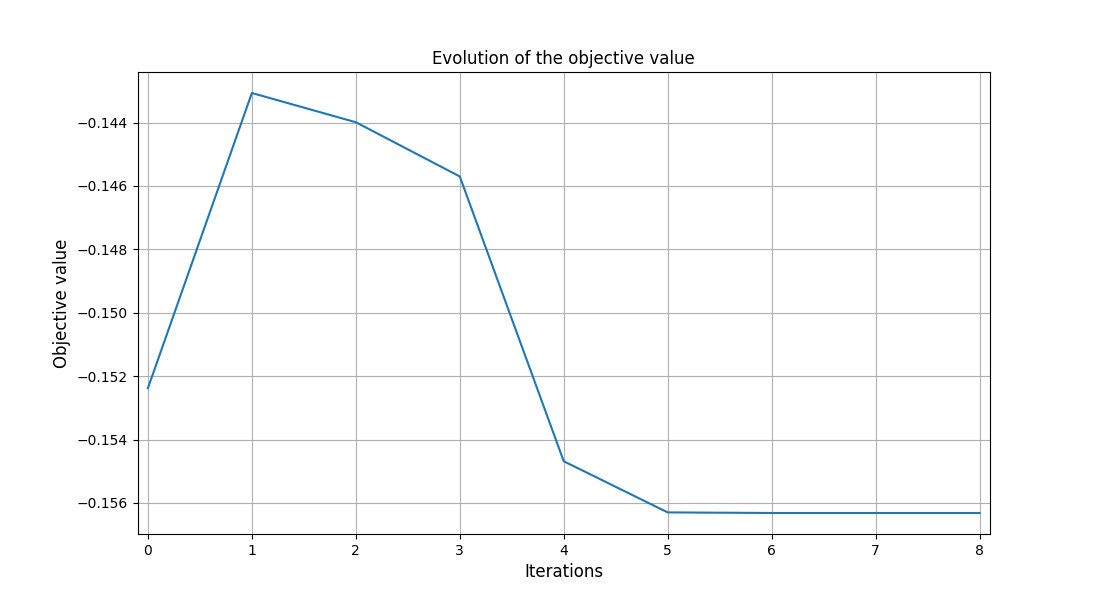
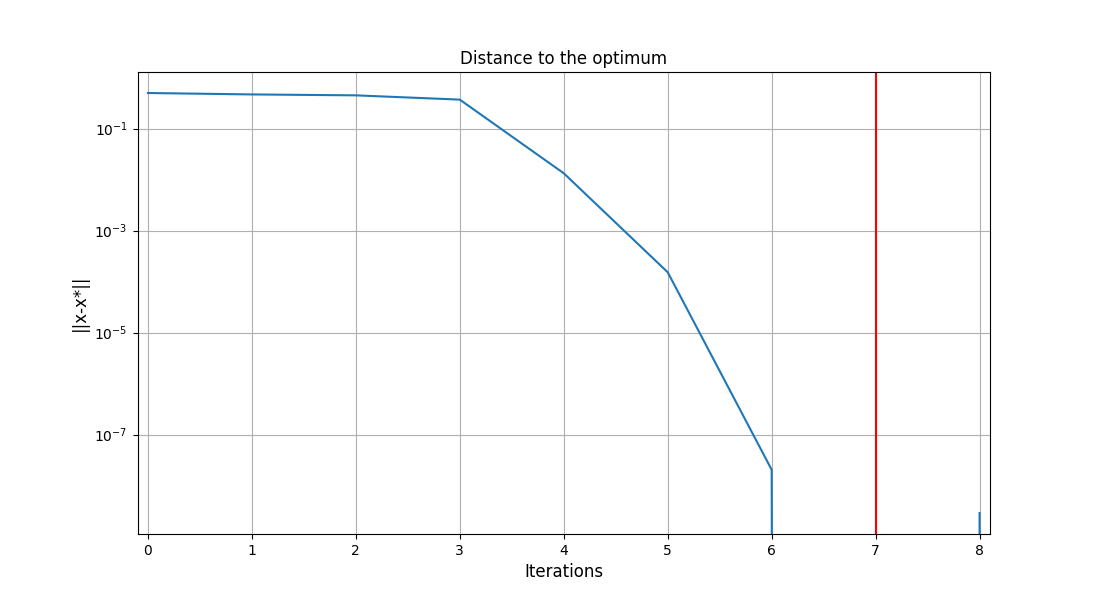
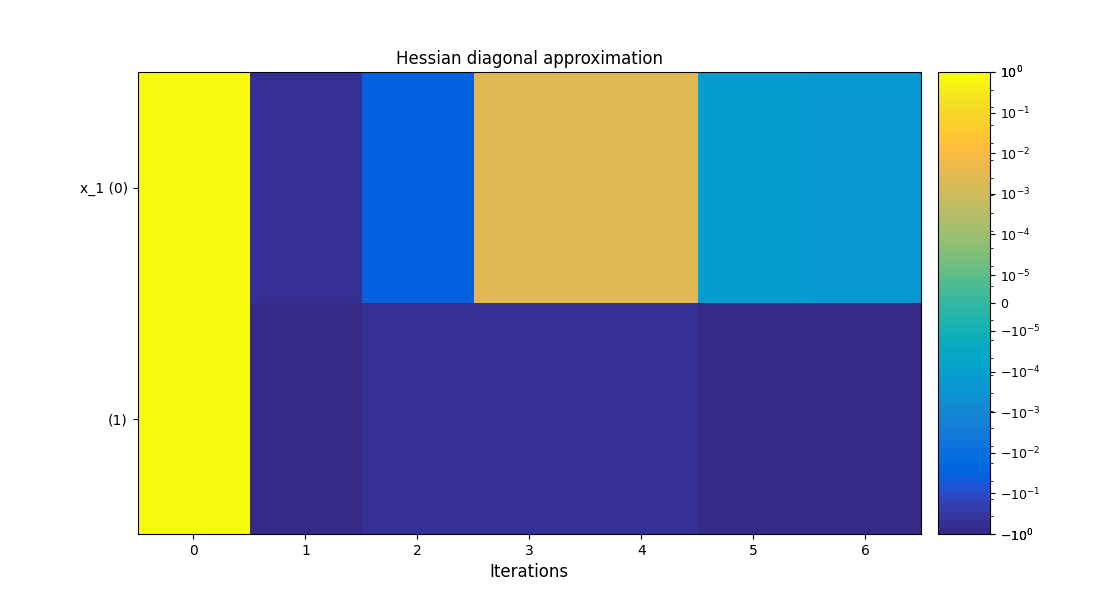
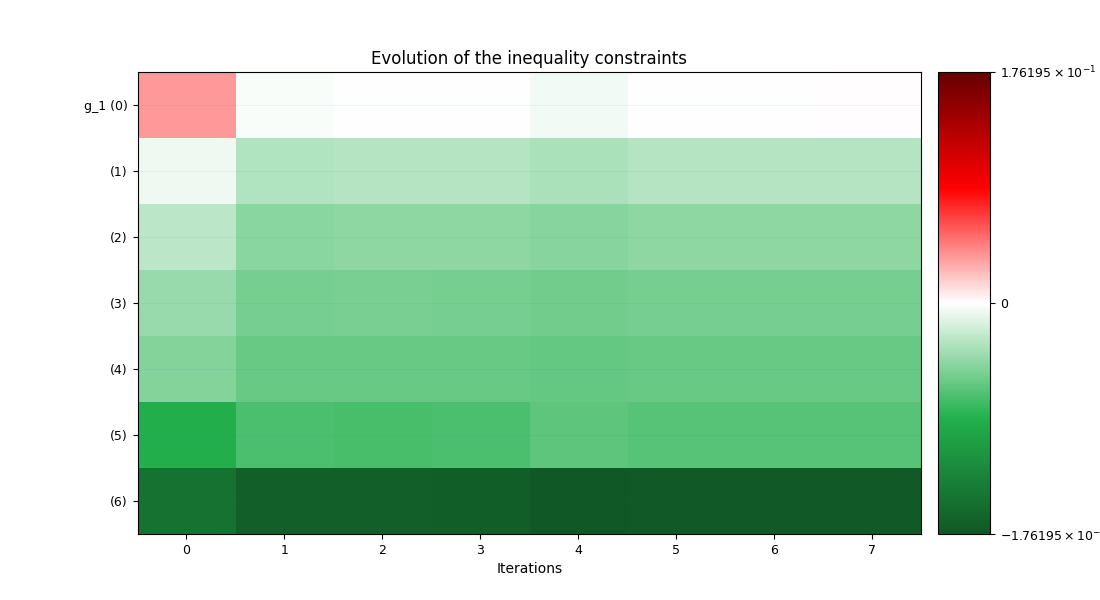
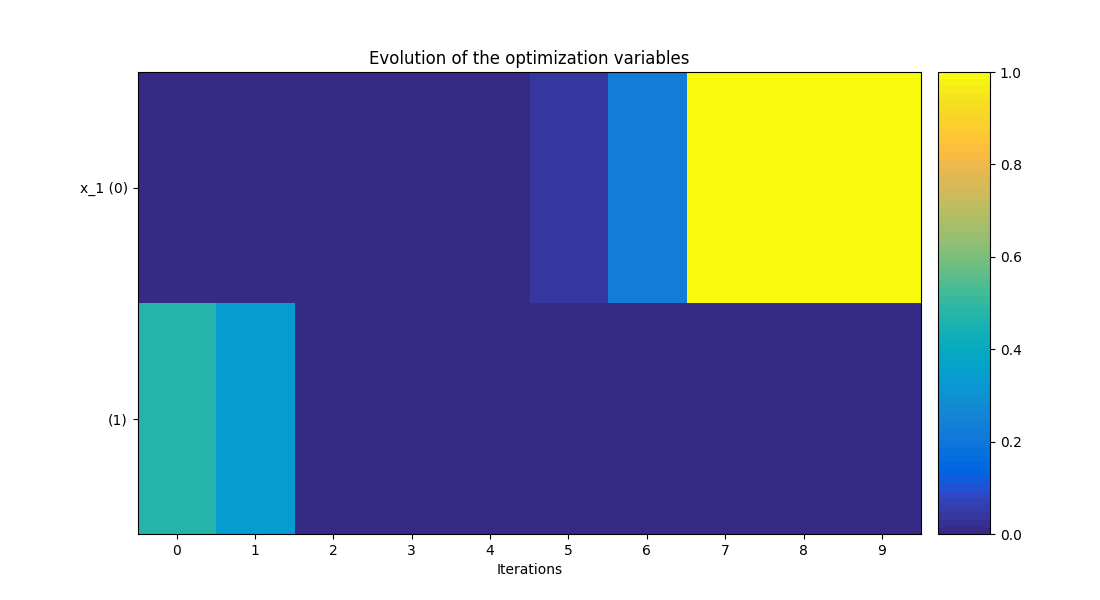
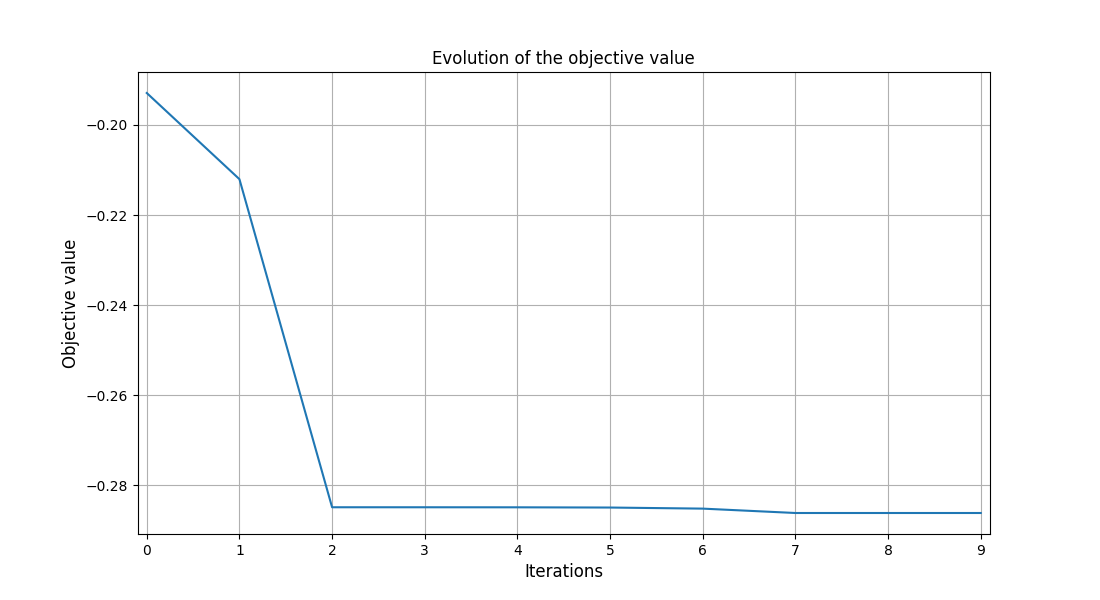
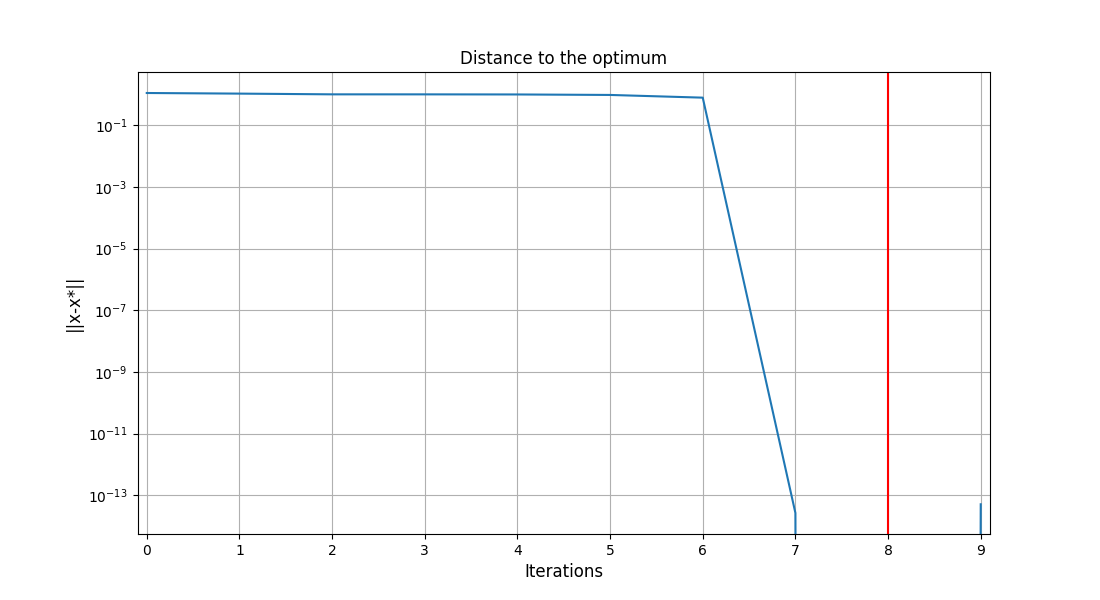
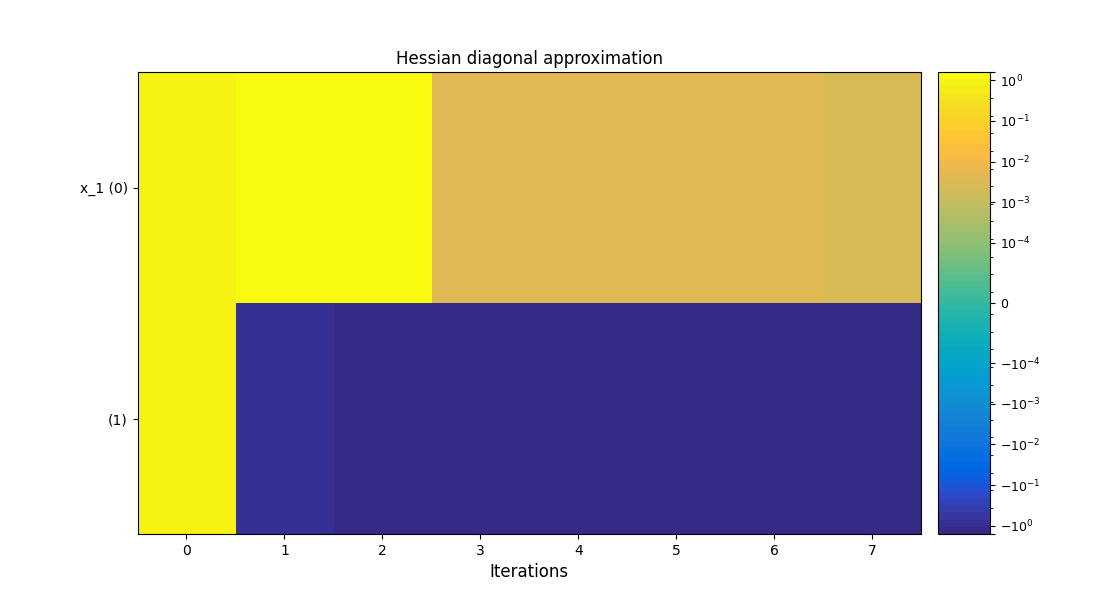
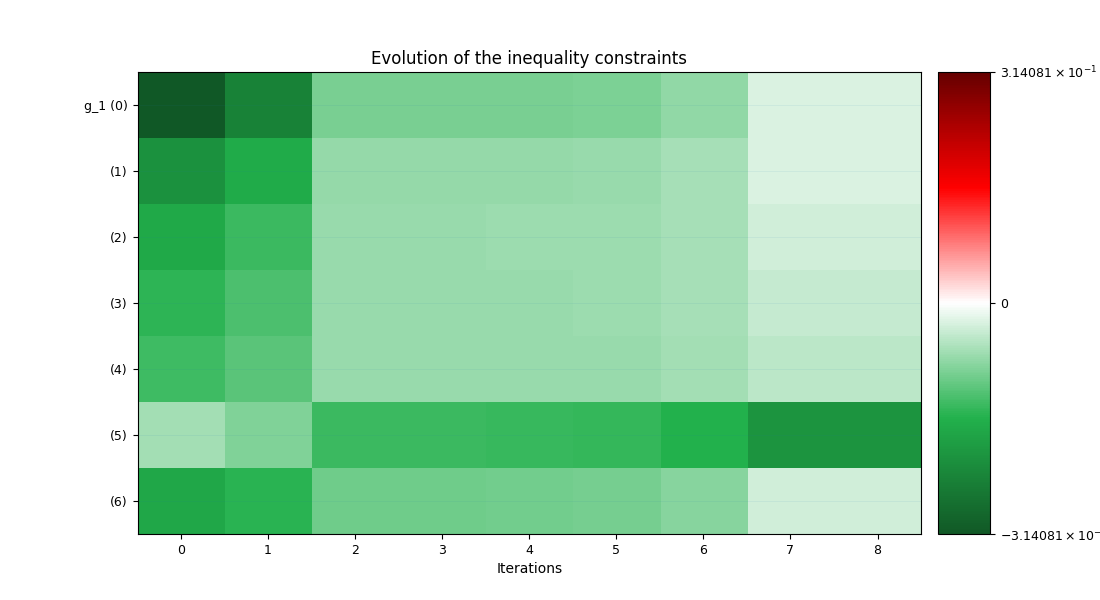
SobieskiPropulsion: 1326 calls.
SobieskiAerodynamics: 1442 calls.
SobieskiMission: 50 calls.
SobieskiStructure: 1571 calls.
Total running time of the script: ( 0 minutes 13.606 seconds)