Tutorial: How to solve an MDO problem¶
This tutorial describes how to solve an MDO problem by means of GEMSEO. For that, we consider the Sellar problem.
Step 1 : Creation of disciplines¶
In order to solve the Sellar problem with GEMSEO, we need first to model this set of equations as a multidisciplinary problem.
For that, the problem is decomposed into three disciplines.
What defines an MDODiscipline¶
A discipline is a set of calculations that produces a set of vector outputs from a set of vector inputs, using either equations or an external software, or a workflow engine.
Programmatically speaking, in GEMSEO, an MDODiscipline is defined by three elements :
the input grammar : the set of rules that defines valid input data,
the output grammar : the set of rules that defines valid output data,
the method to compute the output data from the input data, here the
MDODiscipline._run()method.
The disciplines are all subclasses of MDODiscipline, from which they must inherit.
See also
The grammar is a very powerful and key concept. There are multiple ways of creating grammars in GEMSEO. The preferred one for integrating simulation processes is the use of a JSON schema, but is not detailed here for the sake of simplicity. For more explanations about grammars, see Interfacing simulation software.
Warning
All the inputs and outputs names of the disciplines in a scenario shall be consistent.
GEMSEO assumes that the data are tagged by their names with a global convention in the whole process.
What two disciplines call “X” shall be the same “X”. For instance, the coupling variables are detected thanks to these conventions.
1.1. Define the input and output grammars of the discipline¶
We create a class for each discipline inheriting from MDODiscipline.
After having called the superconstructor MDODiscipline.__init__(),
we complete the constructor of the new discipline
by declaring the Sellar discipline input data names MDODiscipline.input_grammar
and discipline output data names MDODiscipline.output_grammar
in a straightforward way with JSONGrammar.update_from_names() .
Warning
These inputs and outputs shall be NumPy arrays of numbers. The grammars will check this at each execution and prevent any discipline from running with invalid data, or raise an error if outputs are invalid, which happens sometimes with simulation software…
For example, in the case of Sellar 1, we build:
from gemseo.core.discipline import MDODiscipline
from numpy import array, ones
class Sellar1(MDODiscipline):
def __init__(self, residual_form=False):
super(Sellar1, self).__init__()
self.input_grammar.update_from_names(['x_local', 'x_shared', 'y_2'])
self.output_grammar.update_from_names(['y_1'])
See also
An alternative way to declare the inputs and outputs is the usage of JSON schema, see Interfacing simulation software. This gives more control on the type of data that are considered valid inputs and outputs. In our case, it would look like this for the input declaration:
{
"name": "Sellar1_input",
"required": ["x_local","x_shared","y_1","y_2"],
"properties": {
"x_local": {
"items": {
"type": "number",
"id": "0"
},
"type": "array",
"id": "x_local"
},
"x_shared": {
"items": {
"type": "number",
"id": "0"
},
"type": "array",
"id": "x_shared"
},
"y_1": {
"items": {
"type": "number",
"id": "0"
},
"type": "array",
"id": "y_1"
},
"y_2": {
"items": {
"type": "number",
"id": "0"
},
"type": "array",
"id": "y_2"
}
},
"$schema": "http://json-schema.org/draft-04/schema",
"type": "object",
"id": "#Sellar1_input"
}
1.2. Define the execution of the discipline¶
Once the inputs and outputs have been declared in the constructor of the discipline,
the abstract MDODiscipline._run() method of MDODiscipline
shall be overloaded by the discipline to define how outputs are computed from inputs.
See also
The method is protected (starts with “_”)
because it shall not be called from outside the discipline.
External calls that trigger the discipline execution
use the MDODiscipline.execute() public method from the base class,
which provides additional services before and after calling MDODiscipline._run().
These services,
such as data checks by the grammars,
are provided by GEMSEO
and the integrator of the discipline does not need to implement them.
First,
the data values shall be retrieved. For each input declared in the input grammar,
GEMSEO will pass the values as arrays to the MDODiscipline
during the execution of the process.
There are different methods to get these values
within the MDODiscipline._run() method of the discipline:
as a dictionary through the
MDODiscipline.get_input_data()method, which are also already accessible in theMDODiscipline.local_dataattribute of theMDODisciplineor here as a list of values using
MDODiscipline.get_inputs_by_name()with the data names passed as a list.
Tip
The list of all inputs names can also be retrieved
using the method MDODiscipline.get_input_data_names():
sellar1 = Sellar1()
print(sellar1.get_input_data_names())
# ['x_shared', 'y_2', 'x_local']
Then, the computed outputs shall be stored in the MDODiscipline.local_data:
def _run(self):
x_local, x_shared, y_2 = self.get_inputs_by_name(['x_local', 'x_shared', 'y_2'])
y_1 = array([(x_shared[0] ** 2 + x_shared[1] + x_local[0] - 0.2 * y_2[0])**0.5])
self.local_data['y_1'] = y_1
The MDODiscipline.store_local_data() method can also be used to this aim:
def _run(self):
x_local, x_shared, y_2 = self.get_inputs_by_name(['x_local', 'x_shared', 'y_2'])
y_1 = array([(x_shared[0] ** 2 + x_shared[1] + x_local[0] - 0.2 * y_2[0])**0.5])
self.store_local_data(y_1=y_1)
The other Sellar MDODiscipline are created in a similar way.
1.3. How to define derivatives (optional)¶
The MDODiscipline may also provide the derivatives of their outputs
with respect to their inputs, i.e. their Jacobians.
This is useful for gradient-based optimization
or Multi Disciplinary Analyses based on the Newton method.
For a vector of inputs \(x\) and a vector of outputs \(y\),
the Jacobian of the discipline is \(\frac{\partial y}{\partial x}\).
The discipline shall provide a method to compute the Jacobian for a given set of inputs.
This is made by overloading the abstract MDODiscipline._compute_jacobian() method
of MDODiscipline.
The discipline may have multiple inputs and multiple outputs.
To store the multiple Jacobian matrices associated to all the inputs and outputs,
GEMSEO uses a dictionary of dictionaries structure.
This data structure is sparse and makes easy the access and the iteration
over the elements of the Jacobian.
Here is an example of a jacobian definition for the Sellar1 discipline.
The method MDODiscipline._init_jacobian() fills the dict of dict structure
with dense null matrices of the right sizes.
Note that all Jacobians must be 2D matrices,
which avoids ambiguity.
from numpy import atleast_2d
def _compute_jacobian(self, inputs=None, outputs=None):
"""
Computes the jacobian
Args:
inputs: The linearization should be performed with respect
to inputs list. If None, linearization should
be performed wrt all inputs (Default value = None)
outputs: The linearization should be performed on outputs list.
If None, linearization should be performed
on all outputs (Default value = None)
"""
# Initialize all matrices to zeros
self._init_jacobian(with_zeros=True)
x_local, x_shared, y_2 = self.get_inputs_by_name(['x_local', 'x_shared', 'y_2'])
inv_denom = 1. / (self.compute_y_1(x_local, x_shared, y_2))
self.jac['y_1'] = {}
self.jac['y_1']['x_local'] = atleast_2d(array([0.5 * inv_denom]))
self.jac['y_1']['x_shared'] = atleast_2d(array(
[x_shared[0] * inv_denom, 0.5 * inv_denom]))
self.jac['y_1']['y_2'] = atleast_2d(array([-0.1 * inv_denom]))
Synthetic Python code¶
In summary, here is the Python code for the three disciplines of the Sellar.
from math import exp, sqrt
from gemseo.core.discipline import MDODiscipline
class Sellar1(MDODiscipline):
def __init__(self, residual_form=False):
super(Sellar1, self).__init__()
self.input_grammar.update_from_names(['x_local', 'x_shared', 'y_2'])
self.output_grammar.update_from_names(['y_1'])
def _run(self):
x_local, x_shared, y_2 = self.get_inputs_by_name(['x_local', 'x_shared', 'y_2'])
self.local_data['y_1'] = array([compute_y_1(x_shared, x_local, y_2)])
def compute_y_1(x_shared, x_local, y_2):
return sqrt(x_shared[0] ** 2 + x_shared[1] + x_local[0] - 0.2 * y_2[0])
def _compute_jacobian(self, inputs=None, outputs=None):
self._init_jacobian(inputs, outputs, with_zeros=True)
x_local, x_shared, y_2 = self.get_inputs_by_name(
['x_local', 'x_shared', 'y_2'])
inv_denom = 1. / (self.compute_y_1(x_local, x_shared, y_2))
self.jac['y_1'] = {}
self.jac['y_1']['x_local'] = atleast_2d(array([0.5 * inv_denom]))
self.jac['y_1']['x_shared'] = atleast_2d(array(
[x_shared[0] * inv_denom, 0.5 * inv_denom]))
self.jac['y_1']['y_2'] = atleast_2d(array([-0.1 * inv_denom]))
class Sellar2(MDODiscipline):
def __init__(self, residual_form=False):
super(Sellar2, self).__init__()
self.input_grammar.update_from_names(['x_shared', 'y_1'])
self.output_grammar.update_from_names(['y_2'])
def _run(self):
x_shared, y_1 = self.get_inputs_by_name(['x_shared', 'y_1'])
self.local_data['y_2'] = array([abs(y_1) + x_shared[0] + x_shared[1]])
def _compute_jacobian(self, inputs=None, outputs=None):
self._init_jacobian(inputs, outputs, with_zeros=True)
y_1 = self.get_inputs_by_name('y_1')
self.jac['y_2'] = {}
self.jac['y_2']['x_local'] = zeros((1, 1))
self.jac['y_2']['x_shared'] = ones((1, 2))
if y_1[0] < 0.:
self.jac['y_1']['y_1'] = -ones((1, 1))
elif y_1[0] == 0.:
self.jac['y_2']['y_1'] = zeros((1, 1))
else:
self.jac['y_2']['y_1'] = ones((1, 1))
class SellarSystem(MDODiscipline):
def __init__(self):
super(SellarSystem, self).__init__()
self.input_grammar.update_from_names(['x_local', 'x_shared', 'y_1', 'y_2'])
self.output_grammar.update_from_names(['obj', 'c_1', 'c_2'])
def _run(self):
x_local, x_shared, y_1, y_2 = self.get_inputs_by_name(['x_local', 'x_shared', 'y_1', 'y_2'])
self.local_data['obj'] = array([x_local[0] ** 2 + x_shared[1] + y_1[0] ** 2 + exp(-y_2[0])])
self.local_data['c_1'] = array([3.16 - y_1[0]**2])
self.local_data['c_2'] = array([y_2[0] - 24.])
def _compute_jacobian(self, inputs=None, outputs=None):
self._init_jacobian(inputs, outputs, with_zeros=True)
x_local, _, y_1, y_2 = self.get_inputs_by_name(
['x_local', 'x_shared', 'y_1', 'y_2'])
self.jac['c_1']['y_1'] = atleast_2d(array([-2. * y_1]))
self.jac['c_2']['y_2'] = ones((1, 1))
self.jac['obj']['x_local'] = atleast_2d(array([2. * x_local[0]]))
self.jac['obj']['x_shared'] = atleast_2d(array([0., 1.]))
self.jac['obj']['y_1'] = atleast_2d(array([2. * y_1[0]]))
self.jac['obj']['y_2'] = atleast_2d(array([-exp(-y_2[0])]))
Shortcut¶
The classes Sellar1, Sellar2 and SellarSystem are available
in the directory gemseo/problems/sellar.
Consequently, you just need to import them and use it!
from gemseo.problems.sellar.sellar import Sellar1, Sellar2, SellarSystem
disciplines = [Sellar1(), Sellar2(), SellarSystem()]
A more simple alternative consists in
using the create_discipline() API function:
from gemseo import create_discipline
disciplines = create_discipline(['Sellar1', 'Sellar2', 'SellarSystem'])
Going further¶
For more information about the connection of software with GEMSEO, in particular the concepts and what goes on under the hood, please see Interfacing simulation software.
Step 2: Creation and execution of the MDO scenario¶
From the MDODiscipline, we build the scenario.
The scenario is responsible for the creation and execution of the whole process.
It will:
build an optimization problem using a MDO formulation,
connect it to a selected optimization algorithm,
solve the optimization problems
post-process the results.
For that,
we use the class MDOScenario
which is defined by different MDODiscipline and a common DesignSpace.
2.1. Create the MDODiscipline¶
To instantiate the MDOScenario,
we need first the MDODiscipline instances.
from gemseo import create_discipline
disciplines = create_discipline(['Sellar1', 'Sellar2', 'SellarSystem'])
2.2. Create the DesignSpace¶
Then, by means of the API function gemseo.create_design_space(),
we build the DesignSpace,
which defines the design variables,
with their bounds and values:
from numpy import ones, array
from gemseo import create_design_space
design_space = create_design_space()
design_space.add_variable('x_local', 1, l_b=0., u_b=10., value=ones(1))
design_space.add_variable('x_shared', 2, l_b=(-10, 0.), u_b=(10., 10.), value=array([4., 3.]))
design_space.add_variable('y_1', 1, l_b=-100., u_b=100., value=ones(1))
design_space.add_variable('y_2', 1, l_b=-100., u_b=100., value=ones(1))
Warning
Here, we also add the coupling variables in the DesignSpace,
even if we are going to use a MDF formulation,
which computes the coupling using an Multi Disciplinary Analyses:
The formulation will by itself remove the coupling variables from the optimization unknowns, but will use the values as default values for the inputs of the
MDODiscipline.This will also be convenient when we will switch to the IDF, which uses the coupling variables as optimization unknowns.
Alternatively, one can perform MDF
without coupling variables in the DesignSpace,
but set the default values of the inputs
using the MDODiscipline.default_inputs attribute to the three disciplines:
discipline[0].default_inputs = {'y_2': ones(1)}
discipline[1].default_inputs = {'y_1': ones(1)}
discipline[2].default_inputs = {'y_1': ones(1), 'y_2': ones(1)}
2.3. Create the MDOScenario¶
Then, by means of the API function gemseo.create_scenario(),
we create the process which is a MDOScenario.
The scenario delegates the creation of an OptimizationProblem
to the MDOFormulation.
We choose the MDF formulation,
which solves a coupling problem (Multi Disciplinary Analyses)
at each iteration to compute the coupling variables,
here the \(y_1\) and \(y_2\) variables,
from both \(x_{local}\) and \(x_{shared}\) variables.
To be executable,
the scenario needs at least an objective function.
The constraints being optional.
The name of the objective function shall be one of the outputs of the disciplines.
Here,
the SellarSystem discipline outputs “obj”, “c_1”, and “c_2”,
which are declared as, respectively, the objective function and inequality constraints.
from gemseo import create_scenario
scenario = create_scenario(disciplines, 'MDF', 'obj', design_space)
Users may add constraints to the optimization problem.
scenario.add_constraint('c_1', 'ineq')
scenario.add_constraint('c_2', 'ineq')
The execution of the process is triggered
through the resolution of the optimization problem by an optimizer.
The name of the optimizer and its options are given to the scenario
as input data in a Python dictionary.
Here the SLSQP algorithm is a gradient-based optimization algorithm.
The disciplines that we integrated provide no analytical derivatives,
so we need first to tell the scenario to use finite differences
to compute the derivatives using Scenario.set_differentiation_method().
scenario.set_differentiation_method('finite_differences', 1e-6)
2.4. Solve the OptimizationProblem¶
Then, we can run the scenario by calling the MDODiscipline.execute() method of the scenario.
scenario.execute(input_data={'max_iter': 10, 'algo': 'SLSQP'})
The logging message provides substantial information about the process setup, execution and results.
INFO - 17:36:02: *** Start MDO Scenario execution ***
INFO - 17:36:02: MDOScenario
INFO - 17:36:02: Disciplines: Sellar1 Sellar2 SellarSystem
INFO - 17:36:02: MDOFormulation: MDF
INFO - 17:36:02: Algorithm: SLSQP
INFO - 17:36:02: Optimization problem:
INFO - 17:36:02: Minimize: obj(x, z)
INFO - 17:36:02: With respect to: x, z
INFO - 17:36:02: Subject to constraints:
INFO - 17:36:02: c_1(x, z) <= 0.0
INFO - 17:36:02: c_2(x, z) <= 0.0
INFO - 17:36:02: Design Space:
INFO - 17:36:02: +------+-------------+-------+-------------+-------+
INFO - 17:36:02: | name | lower_bound | value | upper_bound | type |
INFO - 17:36:02: +------+-------------+-------+-------------+-------+
INFO - 17:36:02: | x | 0 | 1 | 10 | float |
INFO - 17:36:02: | z | -10 | 4 | 10 | float |
INFO - 17:36:02: | z | 0 | 3 | 10 | float |
INFO - 17:36:02: +------+-------------+-------+-------------+-------+
INFO - 17:36:02: Optimization: 0%| | 0/15 [00:00<?, ?it]
INFO - 17:36:02: Optimization: 13%|█▎ | 2/15 [00:00<00:00, 85.65 it/sec, obj=21.8]
INFO - 17:36:02: Optimization: 20%|██ | 3/15 [00:00<00:00, 45.09 it/sec, obj=5.39]
INFO - 17:36:02: Optimization: 27%|██▋ | 4/15 [00:00<00:00, 31.95 it/sec, obj=3.41]
Optimization: 33%|███▎ | 5/15 [00:00<00:00, 24.53 it/sec, obj=3.19]
Optimization: 40%|████ | 6/15 [00:00<00:00, 20.03 it/sec, obj=3.18]
Optimization: 47%|████▋ | 7/15 [00:00<00:00, 16.73 it/sec, obj=3.18]
Optimization: 53%|█████▎ | 8/15 [00:01<00:00, 14.50 it/sec, obj=3.18]
Optimization: 60%|██████ | 9/15 [00:01<00:00, 14.31 it/sec, obj=3.18]
Optimization result:
Objective value = 3.1833939495785373
The result is feasible.
Status: None
Optimizer message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
Number of calls to the objective function by the optimizer: 10
Constraints values w.r.t. 0:
c_1 = 2.089618700296114e-09
c_2 = -20.244722234251068
Design Space:
+------+-------------+-------------------+-------------+-------+
| name | lower_bound | value | upper_bound | type |
+------+-------------+-------------------+-------------+-------+
| x | 0 | 0 | 10 | float |
| z | -10 | 1.977638882873565 | 10 | float |
| z | 0 | 0 | 10 | float |
+------+-------------+-------------------+-------------+-------+
*** MDO Scenario run terminated in 0:00:01.056022 ***
Step 3: Post-processing of the results¶
Finally, we generate plots of the optimization history: the design variables, the objective function and the constraints values. For a complete description of available post-processing, see How to deal with post-processing.
scenario.post_process("OptHistoryView", save=True)
This generates PDF plots:

The constraints values history¶
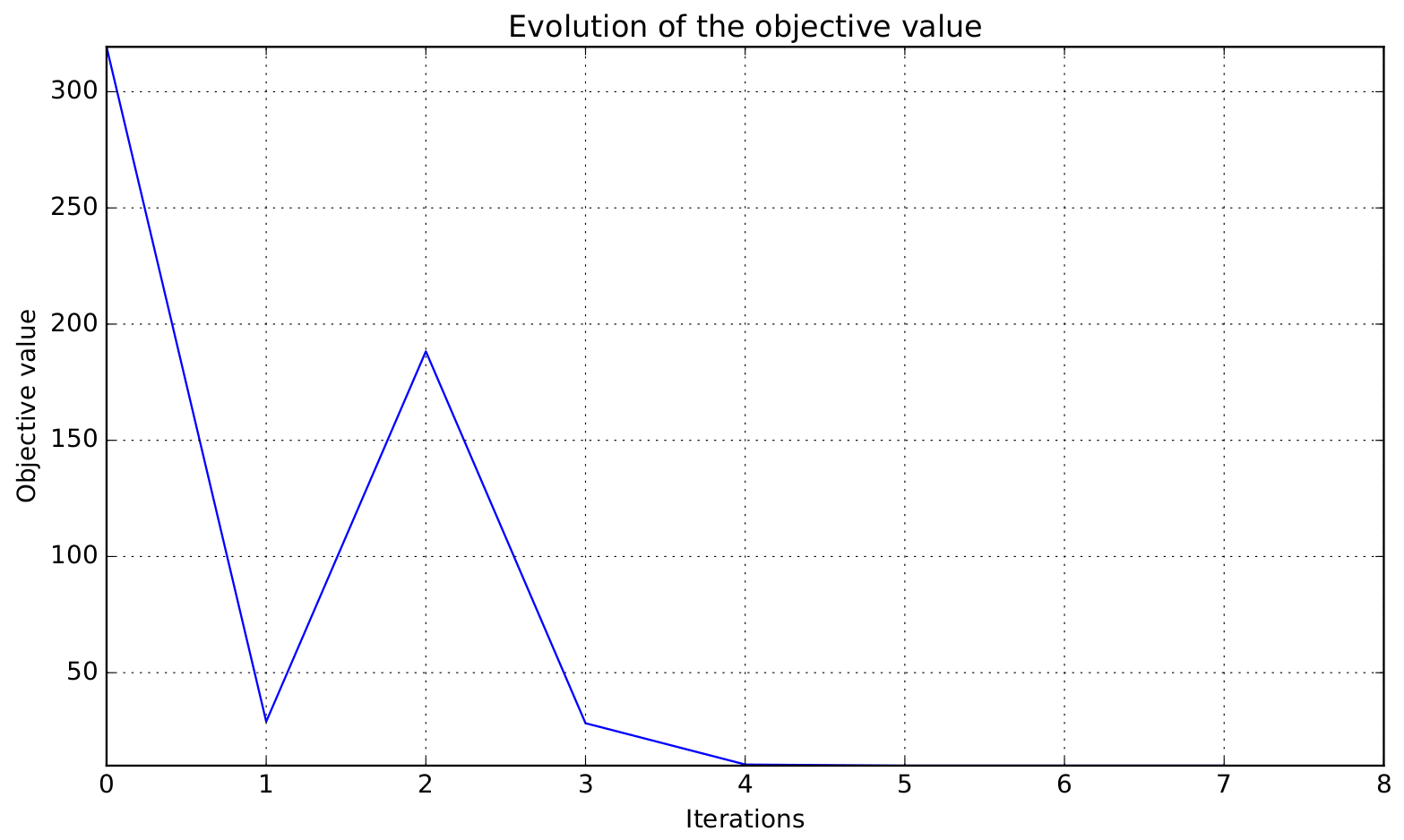
The objective function values history¶
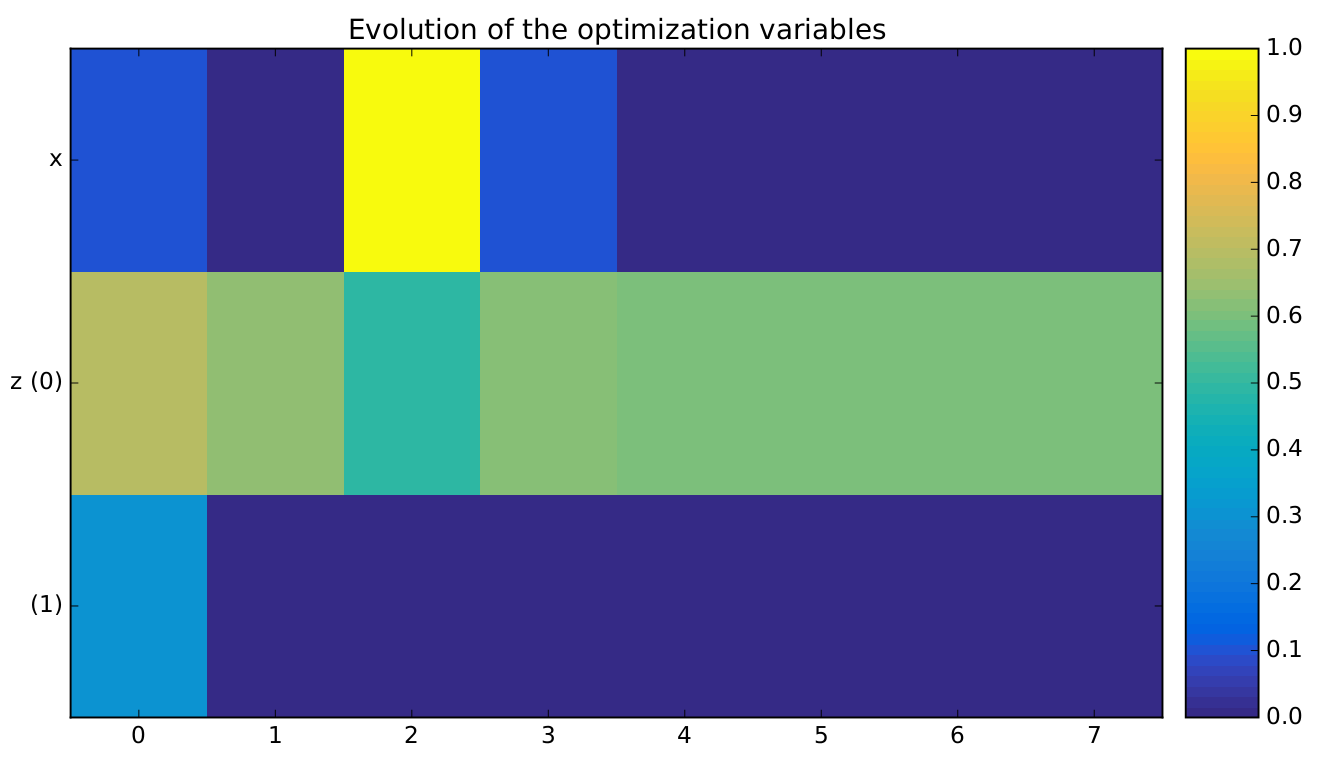
The design variables values history¶
Synthetic Python code¶
from numpy import array, ones
from gemseo import create_discipline, create_design_space, create_scenario
# Step 1: create the disciplines
disciplines = create_discipline(['Sellar1', 'Sellar2', 'SellarSystem'])
# Step 2: create the design space
design_space = create_design_space()
design_space.add_variable('x_local', 1, l_b=0., u_b=10., value=ones(1))
design_space.add_variable('x_shared', 2, l_b=(-10, 0.), u_b=(10., 10.), value=array([4., 3.]))
design_space.add_variable('y_1', 1, l_b=-100., u_b=100., value=ones(1))
design_space.add_variable('y_2', 1, l_b=-100., u_b=100., value=ones(1))
# Step 3: create and solve the MDO scenario
scenario = create_scenario(disciplines, 'MDF', objective_name='obj', design_space=design_space)
scenario.set_differentiation_method('finite_differences', 1e-6)
scenario.default_inputs = {'max_iter': 15, 'algo': 'SLSQP'})
scenario.execute()
# Step 4: analyze the results
scenario.post_process("OptHistoryView", save=True)
Easily switching between MDO formulations¶
One of the main interests of GEMSEO is the ability to switch between MDO formulations very easily. Basically you just need to change the name of the formulation in the script.
Tip
Available formulations can be obtained through the API function
gemseo.get_available_formulations(). The following Python lines
from gemseo import get_available_formulations
print(get_available_formulations())
give:
['IDF', 'BiLevel', 'MDF', 'DisciplinaryOpt']
Here, we are going to try the IDF formulation, which is another classical MDO formulation along with MDF:
scenario = MDOScenario(disciplines, 'IDF', objective_name='obj', design_space=design_space)
In IDF,
all disciplines are executed independently,
and the coupling variables are unknown from the optimizer.
In fact,
the optimizer will solve the coupling problem
simultaneously with the optimization problem
by adding so-called consistency constraints (see MDO formulations).
The IDF class will create the consistency equality constraints for you.
The logging message shows that the generated optimization problem is different, while the disciplines remain the same. One can note the consistency equality constraints, used to solve the coupling problem. The design space now contains the coupling variables.
*** Start MDO Scenario execution ***
MDOScenario:
Disciplines: Sellar1 Sellar2 SellarSystem
MDOFormulation: IDF
Algorithm: SLSQP
Optimization problem:
Minimize: obj(x_loca, x_shared, y_1, y_2)
With respect to:
x_local, x_shared, y_1, y_2
Subject to constraints:
y_1(x_local, x_shared, y_2) = y_1(x_local, x_shared, y_2) - y_1 = 0
y_2(x_shared, y_1) = y_2(x_shared, y_1) - y_2 = 0
c_1(x_local, x_shared, y_1, y_2) <= 0
c_2(x_local, x_shared, y_1, y_2) <= 0
Design Space:
+-------------+-------------+-------+-------------+-------+
| name | lower_bound | value | upper_bound | type |
+-------------+-------------+-------+-------------+-------+
| x_local | 0 | 1 | 10 | float |
| x_shared | -10 | 4 | 10 | float |
| x_shared | 0 | 3 | 10 | float |
| y_1 | -100 | 1 | 100 | float |
| y_2 | -100 | 1 | 100 | float |
+-------------+-------------+-------+-------------+-------+
The results are similar, and the execution duration is 4 times shorter than in the previous case. Indeed, the IDF formulation does not need to solve an Multi Disciplinary Analyses at each step, and is often more efficient in low dimension.
Optimization: 0%| | 0/15 [00:00<?, ?it]
Optimization: 100%|██████████| 15/15 [00:00<00:00, 181.09 it/sec, obj=3.18]
Optimization result:
Objective value = 3.1833939516378016
The result is feasible.
Status: None
Optimizer message: Maximum number of iterations reached. GEMSEO Stopped the driver
Number of calls to the objective function by the optimizer: 17
Constraints values w.r.t. 0:
c_1 = 2.849720459607852e-12
c_2 = -20.244722233075365
y_0 = [1.62536651e-15]
y_1 = [1.44773082e-15]
Design Space:
+------+-------------+-------------------+-------------+-------+
| name | lower_bound | value | upper_bound | type |
+------+-------------+-------------------+-------------+-------+
| x | 0 | 0 | 10 | float |
| z | -10 | 1.977638883462609 | 10 | float |
| z | 0 | 0 | 10 | float |
| y_0 | -100 | 1.777638883462316 | 100 | float |
| y_1 | -100 | 3.755277766924635 | 100 | float |
+------+-------------+-------------------+-------------+-------+
*** MDO Scenario run terminated in 0:00:00.092437 ***