Note
Go to the end to download the full example code.
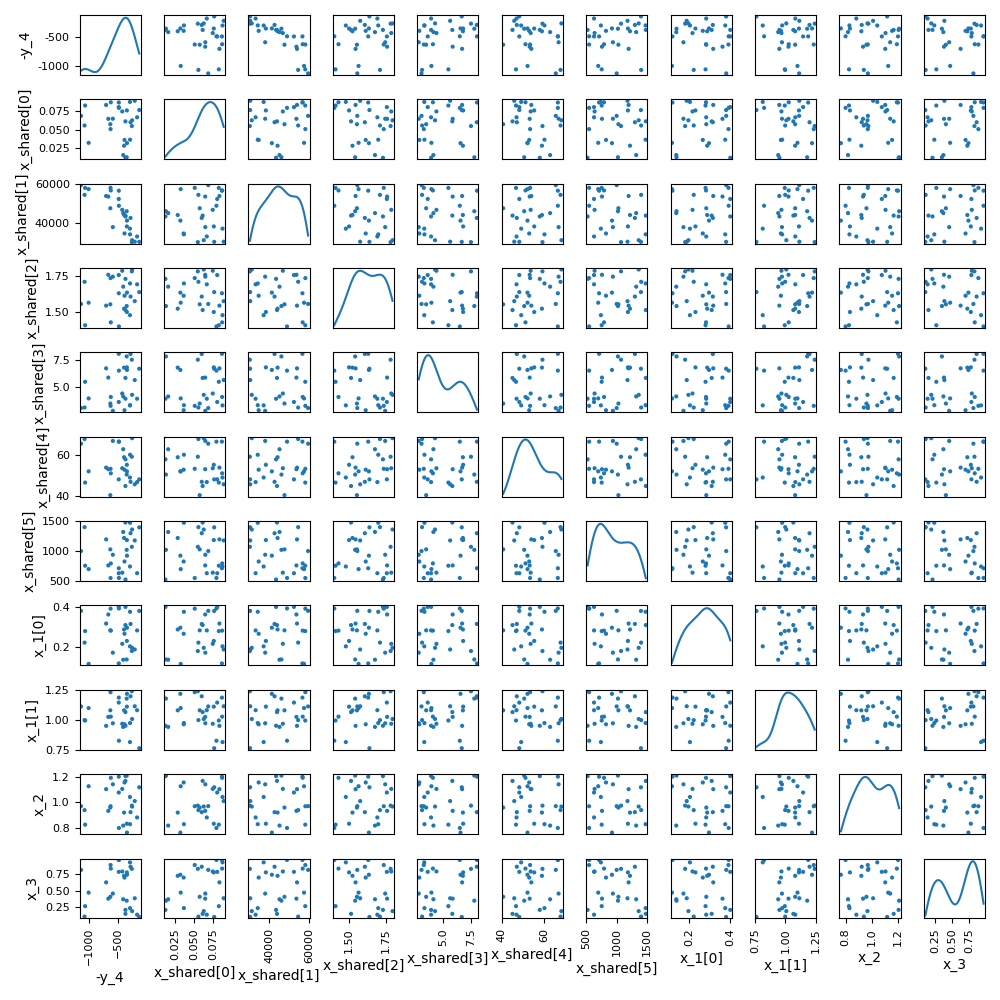
Scatter plot matrix#
In this example, we illustrate the use of the ScatterPlotMatrix
post-processing on the Sobieski's SSBJ problem.
The ScatterPlotMatrix post-processing provide the scatter plot matrix among
design variables and outputs functions. Each non-diagonal block represents the samples
according to the x- and y- coordinates names while the diagonal ones approximate
the probability distributions of the variables, using a kernel-density estimator.
INFO - 16:12:37: Importing the optimization problem from the file sobieski_mdf_scenario.h5
<gemseo.post.scatter_plot_matrix.ScatterPlotMatrix object at 0x7c4bcf362bd0>
from __future__ import annotations
from gemseo import execute_post
from gemseo.settings.post import ScatterPlotMatrix_Settings
execute_post(
"sobieski_mdf_scenario.h5",
settings_model=ScatterPlotMatrix_Settings(
variable_names=["x_shared", "x_1", "x_2", "x_3", "-y_4"],
save=False,
show=True,
),
)
Total running time of the script: (0 minutes 2.199 seconds)