Note
Click here to download the full example code
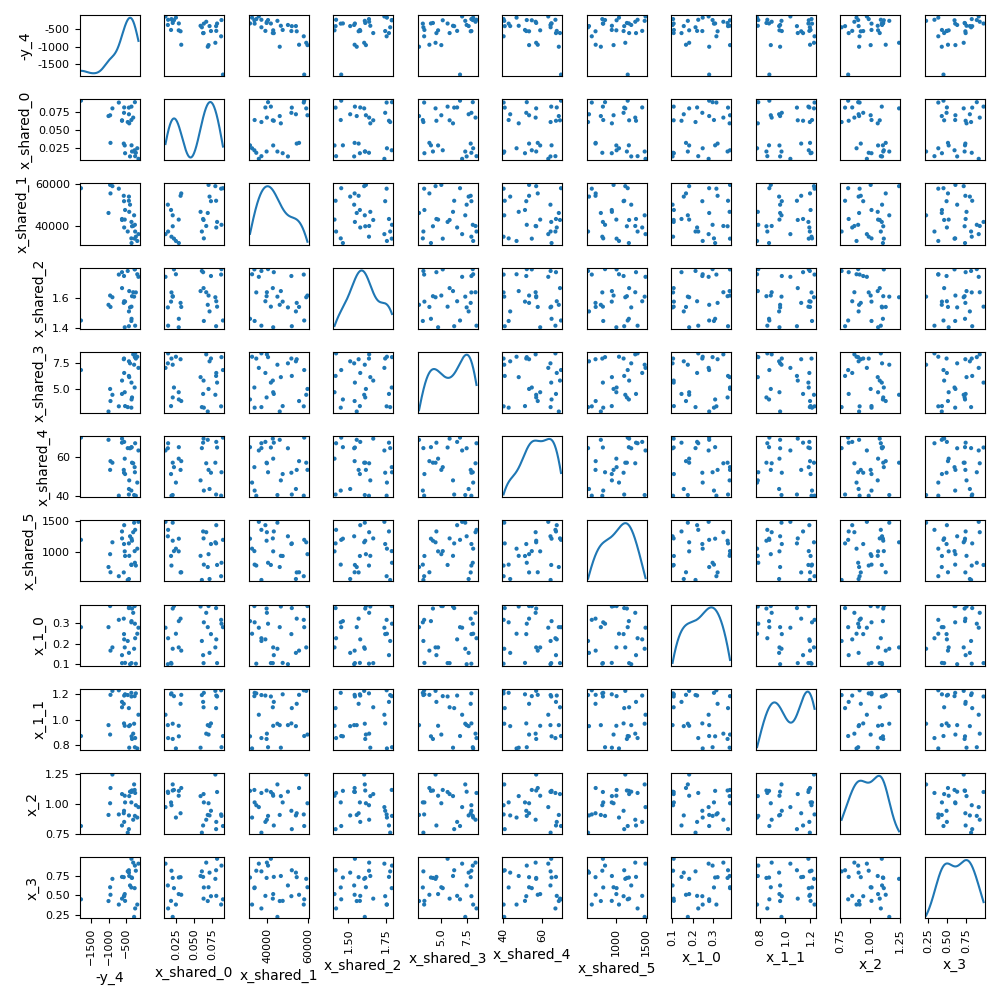
Scatter plot matrix¶
In this example, we illustrate the use of the ScatterPlotMatrix plot
on the Sobieski’s SSBJ problem.
from __future__ import division, unicode_literals
from matplotlib import pyplot as plt
Import¶
The first step is to import some functions from the API and a method to get the design space.
from gemseo.api import configure_logger, create_discipline, create_scenario
from gemseo.problems.sobieski.core import SobieskiProblem
configure_logger()
Out:
<RootLogger root (INFO)>
Description¶
The ScatterPlotMatrix post-processing builds the scatter plot matrix among design variables and outputs functions. Each non-diagonal block represents the samples according to the x- and y- coordinates names while the diagonal ones approximate the probability distributions of the variables, using a kernel-density estimator.
Create disciplines¶
At this point, we instantiate the disciplines of Sobieski’s SSBJ problem: Propulsion, Aerodynamics, Structure and Mission
disciplines = create_discipline(
[
"SobieskiPropulsion",
"SobieskiAerodynamics",
"SobieskiStructure",
"SobieskiMission",
]
)
Create design space¶
We also read the design space from the SobieskiProblem.
design_space = SobieskiProblem().read_design_space()
Create and execute scenario¶
The next step is to build a DOE scenario in order to maximize the range, encoded ‘y_4’, with respect to the design parameters, while satisfying the inequality constraints ‘g_1’, ‘g_2’ and ‘g_3’. We can use the MDF formulation, the Monte Carlo DOE algorithm and 30 samples.
scenario = create_scenario(
disciplines,
formulation="MDF",
objective_name="y_4",
maximize_objective=True,
design_space=design_space,
scenario_type="DOE",
)
scenario.set_differentiation_method("user")
for constraint in ["g_1", "g_2", "g_3"]:
scenario.add_constraint(constraint, "ineq")
scenario.execute({"algo": "OT_MONTE_CARLO", "n_samples": 30})
Out:
INFO - 21:51:40:
INFO - 21:51:40: *** Start DOE Scenario execution ***
INFO - 21:51:40: DOEScenario
INFO - 21:51:40: Disciplines: SobieskiPropulsion SobieskiAerodynamics SobieskiStructure SobieskiMission
INFO - 21:51:40: MDOFormulation: MDF
INFO - 21:51:40: Algorithm: OT_MONTE_CARLO
INFO - 21:51:40: Optimization problem:
INFO - 21:51:40: Minimize: -y_4(x_shared, x_1, x_2, x_3)
INFO - 21:51:40: With respect to: x_shared, x_1, x_2, x_3
INFO - 21:51:40: Subject to constraints:
INFO - 21:51:40: g_1(x_shared, x_1, x_2, x_3) <= 0.0
INFO - 21:51:40: g_2(x_shared, x_1, x_2, x_3) <= 0.0
INFO - 21:51:40: g_3(x_shared, x_1, x_2, x_3) <= 0.0
INFO - 21:51:40: Generation of OT_MONTE_CARLO DOE with OpenTurns
INFO - 21:51:40: DOE sampling: 0%| | 0/30 [00:00<?, ?it]
INFO - 21:51:40: DOE sampling: 7%|▋ | 2/30 [00:00<00:00, 280.22 it/sec]
INFO - 21:51:40: DOE sampling: 17%|█▋ | 5/30 [00:00<00:00, 132.91 it/sec]
INFO - 21:51:41: DOE sampling: 27%|██▋ | 8/30 [00:00<00:00, 84.13 it/sec]
INFO - 21:51:41: DOE sampling: 37%|███▋ | 11/30 [00:00<00:00, 63.23 it/sec]
INFO - 21:51:41: DOE sampling: 47%|████▋ | 14/30 [00:00<00:00, 48.11 it/sec]
INFO - 21:51:41: DOE sampling: 57%|█████▋ | 17/30 [00:00<00:00, 39.31 it/sec]
INFO - 21:51:41: DOE sampling: 67%|██████▋ | 20/30 [00:00<00:00, 33.71 it/sec]
INFO - 21:51:41: DOE sampling: 77%|███████▋ | 23/30 [00:01<00:00, 29.63 it/sec]
INFO - 21:51:41: DOE sampling: 87%|████████▋ | 26/30 [00:01<00:00, 25.94 it/sec]
INFO - 21:51:42: DOE sampling: 97%|█████████▋| 29/30 [00:01<00:00, 23.11 it/sec]
WARNING - 21:51:42: Optimization found no feasible point ! The least infeasible point is selected.
INFO - 21:51:42: DOE sampling: 100%|██████████| 30/30 [00:01<00:00, 22.33 it/sec]
INFO - 21:51:42: Optimization result:
INFO - 21:51:42: Objective value = 617.0803511313786
INFO - 21:51:42: The result is not feasible.
INFO - 21:51:42: Status: None
INFO - 21:51:42: Optimizer message: None
INFO - 21:51:42: Number of calls to the objective function by the optimizer: 30
INFO - 21:51:42: Constraints values:
INFO - 21:51:42: g_1 = [-0.48945084 -0.2922749 -0.21769656 -0.18063263 -0.15912463 -0.07434699
INFO - 21:51:42: -0.16565301]
INFO - 21:51:42: g_2 = 0.010000000000000009
INFO - 21:51:42: g_3 = [-0.78174978 -0.21825022 -0.11408603 -0.01907799]
INFO - 21:51:42: Design space:
INFO - 21:51:42: +----------+-------------+---------------------+-------------+-------+
INFO - 21:51:42: | name | lower_bound | value | upper_bound | type |
INFO - 21:51:42: +----------+-------------+---------------------+-------------+-------+
INFO - 21:51:42: | x_shared | 0.01 | 0.06294679971968815 | 0.09 | float |
INFO - 21:51:42: | x_shared | 30000 | 42733.67550603654 | 60000 | float |
INFO - 21:51:42: | x_shared | 1.4 | 1.663874765307306 | 1.8 | float |
INFO - 21:51:42: | x_shared | 2.5 | 5.819410624921828 | 8.5 | float |
INFO - 21:51:42: | x_shared | 40 | 69.42919736071644 | 70 | float |
INFO - 21:51:42: | x_shared | 500 | 1221.859441367615 | 1500 | float |
INFO - 21:51:42: | x_1 | 0.1 | 0.1065122508792764 | 0.4 | float |
INFO - 21:51:42: | x_1 | 0.75 | 1.09882806437771 | 1.25 | float |
INFO - 21:51:42: | x_2 | 0.75 | 1.07969581180922 | 1.25 | float |
INFO - 21:51:42: | x_3 | 0.1 | 0.4585171784931197 | 1 | float |
INFO - 21:51:42: +----------+-------------+---------------------+-------------+-------+
INFO - 21:51:42: *** DOE Scenario run terminated ***
{'eval_jac': False, 'algo': 'OT_MONTE_CARLO', 'n_samples': 30}
Post-process scenario¶
Lastly, we post-process the scenario by means of the ScatterPlotMatrix
plot which builds scatter plot matrix among design variables, objective
function and constraints.
Tip
Each post-processing method requires different inputs and offers a variety
of customization options. Use the API function
get_post_processing_options_schema() to print a table with
the options for any post-processing algorithm.
Or refer to our dedicated page:
Options for Post-processing algorithms.
design_variables = ["x_shared", "x_1", "x_2", "x_3"]
scenario.post_process(
"ScatterPlotMatrix",
save=False,
show=False,
variables_list=design_variables + ["-y_4"],
)
# Workaround for HTML rendering, instead of ``show=True``
plt.show()
Total running time of the script: ( 0 minutes 5.527 seconds)