Note
Click here to download the full example code
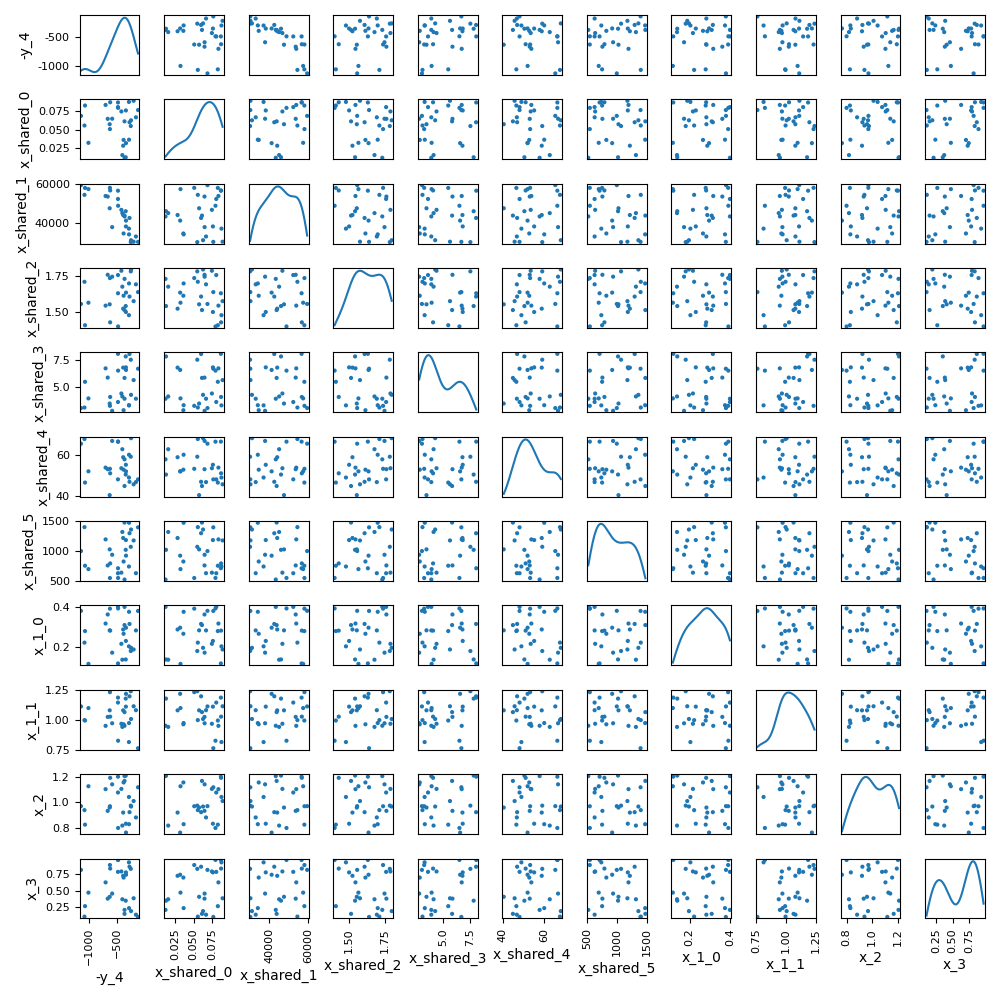
Scatter plot matrix¶
In this example, we illustrate the use of the ScatterPlotMatrix plot
on the Sobieski’s SSBJ problem.
from gemseo.api import configure_logger
from gemseo.api import create_discipline
from gemseo.api import create_scenario
from gemseo.problems.sobieski.core.problem import SobieskiProblem
from matplotlib import pyplot as plt
Import¶
The first step is to import some functions from the API and a method to get the design space.
configure_logger()
Out:
<RootLogger root (INFO)>
Description¶
The ScatterPlotMatrix post-processing builds the scatter plot matrix among design variables and outputs functions. Each non-diagonal block represents the samples according to the x- and y- coordinates names while the diagonal ones approximate the probability distributions of the variables, using a kernel-density estimator.
Create disciplines¶
At this point, we instantiate the disciplines of Sobieski’s SSBJ problem: Propulsion, Aerodynamics, Structure and Mission
disciplines = create_discipline(
[
"SobieskiPropulsion",
"SobieskiAerodynamics",
"SobieskiStructure",
"SobieskiMission",
]
)
Create design space¶
We also read the design space from the SobieskiProblem.
design_space = SobieskiProblem().design_space
Create and execute scenario¶
The next step is to build a DOE scenario in order to maximize the range, encoded ‘y_4’, with respect to the design parameters, while satisfying the inequality constraints ‘g_1’, ‘g_2’ and ‘g_3’. We can use the MDF formulation, the Monte Carlo DOE algorithm and 30 samples.
scenario = create_scenario(
disciplines,
formulation="MDF",
objective_name="y_4",
maximize_objective=True,
design_space=design_space,
scenario_type="DOE",
)
scenario.set_differentiation_method("user")
for constraint in ["g_1", "g_2", "g_3"]:
scenario.add_constraint(constraint, "ineq")
scenario.execute({"algo": "OT_MONTE_CARLO", "n_samples": 30})
Out:
INFO - 07:15:06:
INFO - 07:15:06: *** Start DOEScenario execution ***
INFO - 07:15:06: DOEScenario
INFO - 07:15:06: Disciplines: SobieskiPropulsion SobieskiAerodynamics SobieskiStructure SobieskiMission
INFO - 07:15:06: MDO formulation: MDF
INFO - 07:15:06: Optimization problem:
INFO - 07:15:06: minimize -y_4(x_shared, x_1, x_2, x_3)
INFO - 07:15:06: with respect to x_1, x_2, x_3, x_shared
INFO - 07:15:06: subject to constraints:
INFO - 07:15:06: g_1(x_shared, x_1, x_2, x_3) <= 0.0
INFO - 07:15:06: g_2(x_shared, x_1, x_2, x_3) <= 0.0
INFO - 07:15:06: g_3(x_shared, x_1, x_2, x_3) <= 0.0
INFO - 07:15:06: over the design space:
INFO - 07:15:06: +----------+-------------+-------+-------------+-------+
INFO - 07:15:06: | name | lower_bound | value | upper_bound | type |
INFO - 07:15:06: +----------+-------------+-------+-------------+-------+
INFO - 07:15:06: | x_shared | 0.01 | 0.05 | 0.09 | float |
INFO - 07:15:06: | x_shared | 30000 | 45000 | 60000 | float |
INFO - 07:15:06: | x_shared | 1.4 | 1.6 | 1.8 | float |
INFO - 07:15:06: | x_shared | 2.5 | 5.5 | 8.5 | float |
INFO - 07:15:06: | x_shared | 40 | 55 | 70 | float |
INFO - 07:15:06: | x_shared | 500 | 1000 | 1500 | float |
INFO - 07:15:06: | x_1 | 0.1 | 0.25 | 0.4 | float |
INFO - 07:15:06: | x_1 | 0.75 | 1 | 1.25 | float |
INFO - 07:15:06: | x_2 | 0.75 | 1 | 1.25 | float |
INFO - 07:15:06: | x_3 | 0.1 | 0.5 | 1 | float |
INFO - 07:15:06: +----------+-------------+-------+-------------+-------+
INFO - 07:15:06: Solving optimization problem with algorithm OT_MONTE_CARLO:
INFO - 07:15:06: Generation of OT_MONTE_CARLO DOE with OpenTURNS
INFO - 07:15:06: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 07:15:06: ... 3%|▎ | 1/30 [00:00<00:00, 278.43 it/sec]
INFO - 07:15:07: ... 13%|█▎ | 4/30 [00:00<00:00, 126.78 it/sec]
INFO - 07:15:07: ... 23%|██▎ | 7/30 [00:00<00:00, 82.31 it/sec]
INFO - 07:15:07: ... 33%|███▎ | 10/30 [00:00<00:00, 58.79 it/sec]
INFO - 07:15:07: ... 43%|████▎ | 13/30 [00:00<00:00, 43.06 it/sec]
INFO - 07:15:07: ... 50%|█████ | 15/30 [00:00<00:00, 36.56 it/sec]
INFO - 07:15:07: ... 57%|█████▋ | 17/30 [00:00<00:00, 32.32 it/sec]
INFO - 07:15:07: ... 63%|██████▎ | 19/30 [00:01<00:00, 28.64 it/sec]
INFO - 07:15:07: ... 73%|███████▎ | 22/30 [00:01<00:00, 25.24 it/sec]
INFO - 07:15:08: ... 80%|████████ | 24/30 [00:01<00:00, 23.01 it/sec]
INFO - 07:15:08: ... 90%|█████████ | 27/30 [00:01<00:00, 20.62 it/sec]
INFO - 07:15:08: ... 100%|██████████| 30/30 [00:01<00:00, 18.96 it/sec]
INFO - 07:15:08: ... 100%|██████████| 30/30 [00:01<00:00, 18.93 it/sec]
INFO - 07:15:08: Optimization result:
INFO - 07:15:08: Optimizer info:
INFO - 07:15:08: Status: None
INFO - 07:15:08: Message: None
INFO - 07:15:08: Number of calls to the objective function by the optimizer: 30
INFO - 07:15:08: Solution:
INFO - 07:15:08: The solution is feasible.
INFO - 07:15:08: Objective: -367.45739115001027
INFO - 07:15:08: Standardized constraints:
INFO - 07:15:08: g_1 = [-0.02478574 -0.00310924 -0.00855146 -0.01702654 -0.02484732 -0.04764585
INFO - 07:15:08: -0.19235415]
INFO - 07:15:08: g_2 = -0.09000000000000008
INFO - 07:15:08: g_3 = [-0.98722984 -0.01277016 -0.60760341 -0.0557087 ]
INFO - 07:15:08: Design space:
INFO - 07:15:08: +----------+-------------+---------------------+-------------+-------+
INFO - 07:15:08: | name | lower_bound | value | upper_bound | type |
INFO - 07:15:08: +----------+-------------+---------------------+-------------+-------+
INFO - 07:15:08: | x_shared | 0.01 | 0.01230934749207792 | 0.09 | float |
INFO - 07:15:08: | x_shared | 30000 | 43456.87364611478 | 60000 | float |
INFO - 07:15:08: | x_shared | 1.4 | 1.731884935123487 | 1.8 | float |
INFO - 07:15:08: | x_shared | 2.5 | 3.894765253193514 | 8.5 | float |
INFO - 07:15:08: | x_shared | 40 | 57.92631048228255 | 70 | float |
INFO - 07:15:08: | x_shared | 500 | 520.4048463450415 | 1500 | float |
INFO - 07:15:08: | x_1 | 0.1 | 0.3994784918586811 | 0.4 | float |
INFO - 07:15:08: | x_1 | 0.75 | 0.9500312867674923 | 1.25 | float |
INFO - 07:15:08: | x_2 | 0.75 | 1.205851870260564 | 1.25 | float |
INFO - 07:15:08: | x_3 | 0.1 | 0.2108042391973412 | 1 | float |
INFO - 07:15:08: +----------+-------------+---------------------+-------------+-------+
INFO - 07:15:08: *** End DOEScenario execution (time: 0:00:01.598262) ***
{'eval_jac': False, 'algo': 'OT_MONTE_CARLO', 'n_samples': 30}
Post-process scenario¶
Lastly, we post-process the scenario by means of the ScatterPlotMatrix
plot which builds scatter plot matrix among design variables, objective
function and constraints.
Tip
Each post-processing method requires different inputs and offers a variety
of customization options. Use the API function
get_post_processing_options_schema() to print a table with
the options for any post-processing algorithm.
Or refer to our dedicated page:
Post-processing algorithms.
design_variables = ["x_shared", "x_1", "x_2", "x_3"]
scenario.post_process(
"ScatterPlotMatrix",
save=False,
show=False,
variable_names=design_variables + ["-y_4"],
)
# Workaround for HTML rendering, instead of ``show=True``
plt.show()
Total running time of the script: ( 0 minutes 5.905 seconds)