Note
Go to the end to download the full example code
BiLevel-based MDO on the Sobieski SSBJ test case¶
from __future__ import annotations
from copy import deepcopy
from gemseo import configure_logger
from gemseo import create_discipline
from gemseo import create_scenario
from gemseo import execute_post
from gemseo.problems.sobieski.core.problem import SobieskiProblem
configure_logger()
<RootLogger root (INFO)>
Instantiate the disciplines¶
First, we instantiate the four disciplines of the use case:
SobieskiPropulsion,
SobieskiAerodynamics,
SobieskiMission
and SobieskiStructure.
propu, aero, mission, struct = create_discipline(
[
"SobieskiPropulsion",
"SobieskiAerodynamics",
"SobieskiMission",
"SobieskiStructure",
]
)
Build, execute and post-process the scenario¶
Then, we build the scenario which links the disciplines
with the formulation and the optimization algorithm. Here, we use the
BiLevel formulation. We tell the scenario to minimize -y_4
instead of minimizing y_4 (range), which is the default option.
We need to define the design space.
design_space = SobieskiProblem().design_space
Then, we build a sub-scenario for each strongly coupled disciplines, using the following algorithm, maximum number of iterations and algorithm options:
algo_options = {
"xtol_rel": 1e-7,
"xtol_abs": 1e-7,
"ftol_rel": 1e-7,
"ftol_abs": 1e-7,
"ineq_tolerance": 1e-4,
}
sub_sc_opts = {"max_iter": 30, "algo": "SLSQP", "algo_options": algo_options}
Build a sub-scenario for Propulsion¶
This sub-scenario will minimize SFC.
sc_prop = create_scenario(
propu,
"DisciplinaryOpt",
"y_34",
design_space=deepcopy(design_space).filter("x_3"),
name="PropulsionScenario",
)
sc_prop.default_inputs = sub_sc_opts
sc_prop.add_constraint("g_3", constraint_type="ineq")
Build a sub-scenario for Aerodynamics¶
This sub-scenario will minimize L/D.
sc_aero = create_scenario(
aero,
"DisciplinaryOpt",
"y_24",
deepcopy(design_space).filter("x_2"),
name="AerodynamicsScenario",
maximize_objective=True,
)
sc_aero.default_inputs = sub_sc_opts
sc_aero.add_constraint("g_2", constraint_type="ineq")
Build a sub-scenario for Structure¶
This sub-scenario will maximize log(aircraft total weight / (aircraft total weight - fuel weight)).
sc_str = create_scenario(
struct,
"DisciplinaryOpt",
"y_11",
deepcopy(design_space).filter("x_1"),
name="StructureScenario",
maximize_objective=True,
)
sc_str.add_constraint("g_1", constraint_type="ineq")
sc_str.default_inputs = sub_sc_opts
Build a scenario for Mission¶
This scenario is based on the three previous sub-scenarios and on the Mission and aims to maximize the range (Breguet).
sub_disciplines = [sc_prop, sc_aero, sc_str] + [mission]
design_space = deepcopy(design_space).filter("x_shared")
system_scenario = create_scenario(
sub_disciplines,
"BiLevel",
"y_4",
design_space,
apply_cstr_tosub_scenarios=False,
parallel_scenarios=False,
multithread_scenarios=True,
tolerance=1e-14,
max_mda_iter=30,
maximize_objective=True,
)
system_scenario.add_constraint(["g_1", "g_2", "g_3"], "ineq")
Visualize the XDSM¶
Generate the XDSM on the fly:
log_workflow_status=Truewill log the status of the workflow in the console,save_html(defaultTrue) will generate a self-contained HTML file, that can be automatically opened usingshow_html=True.
system_scenario.xdsmize(save_html=False)
Execute the main scenario¶
system_scenario.execute(
{"max_iter": 50, "algo": "NLOPT_COBYLA", "algo_options": algo_options}
)
INFO - 16:26:08:
INFO - 16:26:08: *** Start MDOScenario execution ***
INFO - 16:26:08: MDOScenario
INFO - 16:26:08: Disciplines: AerodynamicsScenario PropulsionScenario SobieskiMission StructureScenario
INFO - 16:26:08: MDO formulation: BiLevel
INFO - 16:26:08: Optimization problem:
INFO - 16:26:08: minimize -y_4(x_shared)
INFO - 16:26:08: with respect to x_shared
INFO - 16:26:08: subject to constraints:
INFO - 16:26:08: g_1_g_2_g_3(x_shared) <= 0.0
INFO - 16:26:08: over the design space:
INFO - 16:26:08: +-------------+-------------+-------+-------------+-------+
INFO - 16:26:08: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:08: +-------------+-------------+-------+-------------+-------+
INFO - 16:26:08: | x_shared[0] | 0.01 | 0.05 | 0.09 | float |
INFO - 16:26:08: | x_shared[1] | 30000 | 45000 | 60000 | float |
INFO - 16:26:08: | x_shared[2] | 1.4 | 1.6 | 1.8 | float |
INFO - 16:26:08: | x_shared[3] | 2.5 | 5.5 | 8.5 | float |
INFO - 16:26:08: | x_shared[4] | 40 | 55 | 70 | float |
INFO - 16:26:08: | x_shared[5] | 500 | 1000 | 1500 | float |
INFO - 16:26:08: +-------------+-------------+-------+-------------+-------+
INFO - 16:26:08: Solving optimization problem with algorithm NLOPT_COBYLA:
INFO - 16:26:08: ... 0%| | 0/50 [00:00<?, ?it]
INFO - 16:26:08:
INFO - 16:26:08: *** Start PropulsionScenario execution ***
INFO - 16:26:08: PropulsionScenario
INFO - 16:26:08: Disciplines: SobieskiPropulsion
INFO - 16:26:08: MDO formulation: DisciplinaryOpt
INFO - 16:26:08: Optimization problem:
INFO - 16:26:08: minimize y_34(x_3)
INFO - 16:26:08: with respect to x_3
INFO - 16:26:08: subject to constraints:
INFO - 16:26:08: g_3(x_3) <= 0.0
INFO - 16:26:08: over the design space:
INFO - 16:26:08: +------+-------------+-------+-------------+-------+
INFO - 16:26:08: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:08: +------+-------------+-------+-------------+-------+
INFO - 16:26:08: | x_3 | 0.1 | 0.5 | 1 | float |
INFO - 16:26:08: +------+-------------+-------+-------------+-------+
INFO - 16:26:08: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:08: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:08:
INFO - 16:26:08: ... 3%|▎ | 1/30 [00:00<00:00, 1230.72 it/sec, obj=1.11]
INFO - 16:26:08:
INFO - 16:26:08: ... 7%|▋ | 2/30 [00:00<00:00, 420.73 it/sec, obj=1.14]
INFO - 16:26:08:
INFO - 16:26:08: ... 10%|█ | 3/30 [00:00<00:00, 480.91 it/sec, obj=1.1]
INFO - 16:26:08:
INFO - 16:26:08: ... 13%|█▎ | 4/30 [00:00<00:00, 418.39 it/sec, obj=1.11]
INFO - 16:26:08:
INFO - 16:26:08:
INFO - 16:26:08: Optimization result:
INFO - 16:26:08: Optimizer info:
INFO - 16:26:08: Status: 8
INFO - 16:26:08: Message: Positive directional derivative for linesearch
INFO - 16:26:08: Number of calls to the objective function by the optimizer: 13
INFO - 16:26:08: Solution:
INFO - 16:26:08: The solution is feasible.
INFO - 16:26:08: Objective: 1.1087874739328383
INFO - 16:26:08: Standardized constraints:
INFO - 16:26:08: g_3 = [-0.91571362 -0.08428638 0. -0.05794805]
INFO - 16:26:08: Design space:
INFO - 16:26:08: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:08: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:08: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:08: | x_3 | 0.1 | 0.4302702621790957 | 1 | float |
INFO - 16:26:08: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:08: *** End PropulsionScenario execution (time: 0:00:00.029137) ***
INFO - 16:26:08:
INFO - 16:26:08: *** Start AerodynamicsScenario execution ***
INFO - 16:26:08: AerodynamicsScenario
INFO - 16:26:08: Disciplines: SobieskiAerodynamics
INFO - 16:26:08: MDO formulation: DisciplinaryOpt
INFO - 16:26:08: Optimization problem:
INFO - 16:26:08: minimize -y_24(x_2)
INFO - 16:26:08: with respect to x_2
INFO - 16:26:08: subject to constraints:
INFO - 16:26:08: g_2(x_2) <= 0.0
INFO - 16:26:08: over the design space:
INFO - 16:26:08: +------+-------------+-------+-------------+-------+
INFO - 16:26:08: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:08: +------+-------------+-------+-------------+-------+
INFO - 16:26:08: | x_2 | 0.75 | 1 | 1.25 | float |
INFO - 16:26:08: +------+-------------+-------+-------------+-------+
INFO - 16:26:08: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:08: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:08:
INFO - 16:26:08: ... 3%|▎ | 1/30 [00:00<00:00, 802.74 it/sec, obj=-4.15]
INFO - 16:26:08:
INFO - 16:26:08: ... 7%|▋ | 2/30 [00:00<00:00, 377.41 it/sec, obj=-4.22]
INFO - 16:26:08:
INFO - 16:26:08: ... 10%|█ | 3/30 [00:00<00:00, 361.05 it/sec, obj=-4.28]
INFO - 16:26:08:
INFO - 16:26:08:
INFO - 16:26:08: Optimization result:
INFO - 16:26:08: Optimizer info:
INFO - 16:26:08: Status: 8
INFO - 16:26:08: Message: Positive directional derivative for linesearch
INFO - 16:26:08: Number of calls to the objective function by the optimizer: 4
INFO - 16:26:08: Solution:
INFO - 16:26:08: The solution is feasible.
INFO - 16:26:08: Objective: -4.283343558640357
INFO - 16:26:08: Standardized constraints:
INFO - 16:26:08: g_2 = -0.040000000000000036
INFO - 16:26:08: Design space:
INFO - 16:26:08: +------+-------------+-------+-------------+-------+
INFO - 16:26:08: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:08: +------+-------------+-------+-------------+-------+
INFO - 16:26:08: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:08: +------+-------------+-------+-------------+-------+
INFO - 16:26:08: *** End AerodynamicsScenario execution (time: 0:00:00.022247) ***
INFO - 16:26:08:
INFO - 16:26:08: *** Start StructureScenario execution ***
INFO - 16:26:08: StructureScenario
INFO - 16:26:08: Disciplines: SobieskiStructure
INFO - 16:26:08: MDO formulation: DisciplinaryOpt
INFO - 16:26:08: Optimization problem:
INFO - 16:26:08: minimize -y_11(x_1)
INFO - 16:26:08: with respect to x_1
INFO - 16:26:08: subject to constraints:
INFO - 16:26:08: g_1(x_1) <= 0.0
INFO - 16:26:08: over the design space:
INFO - 16:26:08: +--------+-------------+-------+-------------+-------+
INFO - 16:26:08: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:08: +--------+-------------+-------+-------------+-------+
INFO - 16:26:08: | x_1[0] | 0.1 | 0.25 | 0.4 | float |
INFO - 16:26:08: | x_1[1] | 0.75 | 1 | 1.25 | float |
INFO - 16:26:08: +--------+-------------+-------+-------------+-------+
INFO - 16:26:08: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:08: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:08:
INFO - 16:26:08: ... 3%|▎ | 1/30 [00:00<00:00, 485.00 it/sec, obj=-.152]
INFO - 16:26:08:
INFO - 16:26:08: ... 7%|▋ | 2/30 [00:00<00:00, 238.99 it/sec, obj=-.143]
INFO - 16:26:08:
INFO - 16:26:08: ... 10%|█ | 3/30 [00:00<00:00, 222.14 it/sec, obj=-.144]
INFO - 16:26:08:
INFO - 16:26:08: ... 13%|█▎ | 4/30 [00:00<00:00, 208.05 it/sec, obj=-.146]
INFO - 16:26:08:
INFO - 16:26:08: ... 17%|█▋ | 5/30 [00:00<00:00, 197.77 it/sec, obj=-.155]
INFO - 16:26:08:
INFO - 16:26:08: ... 20%|██ | 6/30 [00:00<00:00, 193.50 it/sec, obj=-.156]
INFO - 16:26:08:
INFO - 16:26:08: ... 23%|██▎ | 7/30 [00:00<00:00, 191.30 it/sec, obj=-.156]
INFO - 16:26:08:
INFO - 16:26:08: ... 27%|██▋ | 8/30 [00:00<00:00, 189.46 it/sec, obj=-.156]
INFO - 16:26:08:
INFO - 16:26:08: ... 30%|███ | 9/30 [00:00<00:00, 188.26 it/sec, obj=-.156]
INFO - 16:26:08:
INFO - 16:26:08:
INFO - 16:26:08: Optimization result:
INFO - 16:26:08: Optimizer info:
INFO - 16:26:08: Status: None
INFO - 16:26:08: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:26:08: Number of calls to the objective function by the optimizer: 10
INFO - 16:26:08: Solution:
INFO - 16:26:08: The solution is feasible.
INFO - 16:26:08: Objective: -0.15631824062042746
INFO - 16:26:08: Standardized constraints:
INFO - 16:26:08: g_1 = [ 3.99302813e-12 -2.99419226e-02 -4.49346629e-02 -5.39372764e-02
INFO - 16:26:08: -5.99419226e-02 -6.61963740e-02 -1.73803626e-01]
INFO - 16:26:08: Design space:
INFO - 16:26:08: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:08: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:08: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:08: | x_1[0] | 0.1 | 0.1 | 0.4 | float |
INFO - 16:26:08: | x_1[1] | 0.75 | 0.9857121415472604 | 1.25 | float |
INFO - 16:26:08: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:08: *** End StructureScenario execution (time: 0:00:00.060868) ***
INFO - 16:26:08: ... 2%|▏ | 1/50 [00:00<00:17, 2.88 it/sec, obj=-553]
INFO - 16:26:08:
INFO - 16:26:08: *** Start PropulsionScenario execution ***
INFO - 16:26:08: PropulsionScenario
INFO - 16:26:08: Disciplines: SobieskiPropulsion
INFO - 16:26:08: MDO formulation: DisciplinaryOpt
INFO - 16:26:08: Optimization problem:
INFO - 16:26:08: minimize y_34(x_3)
INFO - 16:26:08: with respect to x_3
INFO - 16:26:08: subject to constraints:
INFO - 16:26:08: g_3(x_3) <= 0.0
INFO - 16:26:08: over the design space:
INFO - 16:26:08: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:08: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:08: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:08: | x_3 | 0.1 | 0.4302702621790957 | 1 | float |
INFO - 16:26:08: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:08: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:08: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:08:
INFO - 16:26:08: ... 3%|▎ | 1/30 [00:00<00:00, 1759.36 it/sec, obj=1.11]
INFO - 16:26:08:
INFO - 16:26:08: ... 7%|▋ | 2/30 [00:00<00:00, 451.49 it/sec, obj=1.11]
INFO - 16:26:08:
INFO - 16:26:08:
INFO - 16:26:08: Optimization result:
INFO - 16:26:08: Optimizer info:
INFO - 16:26:08: Status: 8
INFO - 16:26:08: Message: Positive directional derivative for linesearch
INFO - 16:26:08: Number of calls to the objective function by the optimizer: 12
INFO - 16:26:08: Solution:
INFO - 16:26:08: The solution is feasible.
INFO - 16:26:08: Objective: 1.1087874739328383
INFO - 16:26:08: Standardized constraints:
INFO - 16:26:08: g_3 = [-0.75494685 -0.24505315 0. -0.05794805]
INFO - 16:26:08: Design space:
INFO - 16:26:08: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:08: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:08: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:08: | x_3 | 0.1 | 0.4302702621790957 | 1 | float |
INFO - 16:26:08: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:08: *** End PropulsionScenario execution (time: 0:00:00.023348) ***
INFO - 16:26:08:
INFO - 16:26:08: *** Start AerodynamicsScenario execution ***
INFO - 16:26:08: AerodynamicsScenario
INFO - 16:26:08: Disciplines: SobieskiAerodynamics
INFO - 16:26:08: MDO formulation: DisciplinaryOpt
INFO - 16:26:08: Optimization problem:
INFO - 16:26:08: minimize -y_24(x_2)
INFO - 16:26:08: with respect to x_2
INFO - 16:26:08: subject to constraints:
INFO - 16:26:08: g_2(x_2) <= 0.0
INFO - 16:26:08: over the design space:
INFO - 16:26:08: +------+-------------+-------+-------------+-------+
INFO - 16:26:08: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:08: +------+-------------+-------+-------------+-------+
INFO - 16:26:08: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:08: +------+-------------+-------+-------------+-------+
INFO - 16:26:08: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:08: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:08:
INFO - 16:26:08: ... 3%|▎ | 1/30 [00:00<00:00, 937.07 it/sec, obj=-3.46]
INFO - 16:26:08:
WARNING - 16:26:08: Optimization found no feasible point ! The least infeasible point is selected.
INFO - 16:26:08:
INFO - 16:26:08: Optimization result:
INFO - 16:26:08: Optimizer info:
INFO - 16:26:08: Status: 8
INFO - 16:26:08: Message: Positive directional derivative for linesearch
INFO - 16:26:08: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:08: Solution:
WARNING - 16:26:08: The solution is not feasible.
INFO - 16:26:08: Objective: -3.456006478817154
INFO - 16:26:08: Standardized constraints:
INFO - 16:26:08: g_2 = 0.010000000000000009
INFO - 16:26:08: Design space:
INFO - 16:26:08: +------+-------------+-------+-------------+-------+
INFO - 16:26:08: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:08: +------+-------------+-------+-------------+-------+
INFO - 16:26:08: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:08: +------+-------------+-------+-------------+-------+
INFO - 16:26:08: *** End AerodynamicsScenario execution (time: 0:00:00.015199) ***
INFO - 16:26:08:
INFO - 16:26:08: *** Start StructureScenario execution ***
INFO - 16:26:08: StructureScenario
INFO - 16:26:08: Disciplines: SobieskiStructure
INFO - 16:26:08: MDO formulation: DisciplinaryOpt
INFO - 16:26:08: Optimization problem:
INFO - 16:26:08: minimize -y_11(x_1)
INFO - 16:26:08: with respect to x_1
INFO - 16:26:08: subject to constraints:
INFO - 16:26:08: g_1(x_1) <= 0.0
INFO - 16:26:08: over the design space:
INFO - 16:26:08: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:08: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:08: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:08: | x_1[0] | 0.1 | 0.1 | 0.4 | float |
INFO - 16:26:08: | x_1[1] | 0.75 | 0.9857121415472604 | 1.25 | float |
INFO - 16:26:08: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:08: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:08: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:08:
INFO - 16:26:08: ... 3%|▎ | 1/30 [00:00<00:00, 562.54 it/sec, obj=-.193]
INFO - 16:26:08:
INFO - 16:26:08: ... 7%|▋ | 2/30 [00:00<00:00, 248.92 it/sec, obj=-.212]
INFO - 16:26:08:
INFO - 16:26:08: ... 10%|█ | 3/30 [00:00<00:00, 212.83 it/sec, obj=-.285]
INFO - 16:26:08:
INFO - 16:26:08: ... 13%|█▎ | 4/30 [00:00<00:00, 202.87 it/sec, obj=-.285]
INFO - 16:26:08:
INFO - 16:26:08: ... 17%|█▋ | 5/30 [00:00<00:00, 195.32 it/sec, obj=-.285]
INFO - 16:26:08:
INFO - 16:26:08: ... 20%|██ | 6/30 [00:00<00:00, 191.93 it/sec, obj=-.285]
INFO - 16:26:08:
INFO - 16:26:08: ... 23%|██▎ | 7/30 [00:00<00:00, 189.91 it/sec, obj=-.285]
INFO - 16:26:08:
INFO - 16:26:08: ... 27%|██▋ | 8/30 [00:00<00:00, 188.27 it/sec, obj=-.286]
INFO - 16:26:08:
INFO - 16:26:08: ... 30%|███ | 9/30 [00:00<00:00, 186.18 it/sec, obj=-.286]
INFO - 16:26:08:
INFO - 16:26:08: ... 33%|███▎ | 10/30 [00:00<00:00, 185.41 it/sec, obj=-.286]
INFO - 16:26:08:
INFO - 16:26:08:
INFO - 16:26:08: Optimization result:
INFO - 16:26:08: Optimizer info:
INFO - 16:26:08: Status: None
INFO - 16:26:08: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:26:08: Number of calls to the objective function by the optimizer: 11
INFO - 16:26:08: Solution:
INFO - 16:26:08: The solution is feasible.
INFO - 16:26:08: Objective: -0.2861511006159976
INFO - 16:26:08: Standardized constraints:
INFO - 16:26:08: g_1 = [-0.02505357 -0.02542063 -0.03358482 -0.04103714 -0.04706944 -0.20645898
INFO - 16:26:08: -0.03354102]
INFO - 16:26:08: Design space:
INFO - 16:26:08: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:08: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:08: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:08: | x_1[0] | 0.1 | 0.3999999999999848 | 0.4 | float |
INFO - 16:26:08: | x_1[1] | 0.75 | 0.7500000000000006 | 1.25 | float |
INFO - 16:26:08: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:08: *** End StructureScenario execution (time: 0:00:00.065967) ***
INFO - 16:26:08: ... 4%|▍ | 2/50 [00:00<00:13, 3.48 it/sec, obj=-574]
INFO - 16:26:08:
INFO - 16:26:08: *** Start PropulsionScenario execution ***
INFO - 16:26:08: PropulsionScenario
INFO - 16:26:08: Disciplines: SobieskiPropulsion
INFO - 16:26:08: MDO formulation: DisciplinaryOpt
INFO - 16:26:08: Optimization problem:
INFO - 16:26:08: minimize y_34(x_3)
INFO - 16:26:08: with respect to x_3
INFO - 16:26:08: subject to constraints:
INFO - 16:26:08: g_3(x_3) <= 0.0
INFO - 16:26:08: over the design space:
INFO - 16:26:08: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:08: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:08: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:08: | x_3 | 0.1 | 0.4302702621790957 | 1 | float |
INFO - 16:26:08: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:08: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:08: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:08:
INFO - 16:26:08: ... 3%|▎ | 1/30 [00:00<00:00, 1753.47 it/sec, obj=1.1]
INFO - 16:26:08:
INFO - 16:26:08: ... 7%|▋ | 2/30 [00:00<00:00, 457.17 it/sec, obj=1.16]
INFO - 16:26:08:
INFO - 16:26:08: ... 10%|█ | 3/30 [00:00<00:00, 510.01 it/sec, obj=1.09]
INFO - 16:26:08:
INFO - 16:26:08: ... 13%|█▎ | 4/30 [00:00<00:00, 435.66 it/sec, obj=1.12]
INFO - 16:26:08:
INFO - 16:26:08: ... 17%|█▋ | 5/30 [00:00<00:00, 404.14 it/sec, obj=1.12]
INFO - 16:26:08:
INFO - 16:26:08: ... 20%|██ | 6/30 [00:00<00:00, 384.53 it/sec, obj=1.12]
INFO - 16:26:08:
INFO - 16:26:08:
INFO - 16:26:08: Optimization result:
INFO - 16:26:08: Optimizer info:
INFO - 16:26:08: Status: None
INFO - 16:26:08: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:26:08: Number of calls to the objective function by the optimizer: 8
INFO - 16:26:08: Solution:
INFO - 16:26:08: The solution is feasible.
INFO - 16:26:08: Objective: 1.1169456193906955
INFO - 16:26:08: Standardized constraints:
INFO - 16:26:08: g_3 = [-7.20996205e-01 -2.79003795e-01 -2.22044605e-16 -1.27460556e-01]
INFO - 16:26:08: Design space:
INFO - 16:26:08: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:08: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:08: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:08: | x_3 | 0.1 | 0.2871004772038966 | 1 | float |
INFO - 16:26:08: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:08: *** End PropulsionScenario execution (time: 0:00:00.027714) ***
INFO - 16:26:08:
INFO - 16:26:08: *** Start AerodynamicsScenario execution ***
INFO - 16:26:08: AerodynamicsScenario
INFO - 16:26:08: Disciplines: SobieskiAerodynamics
INFO - 16:26:08: MDO formulation: DisciplinaryOpt
INFO - 16:26:08: Optimization problem:
INFO - 16:26:08: minimize -y_24(x_2)
INFO - 16:26:08: with respect to x_2
INFO - 16:26:08: subject to constraints:
INFO - 16:26:08: g_2(x_2) <= 0.0
INFO - 16:26:08: over the design space:
INFO - 16:26:08: +------+-------------+-------+-------------+-------+
INFO - 16:26:08: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:08: +------+-------------+-------+-------------+-------+
INFO - 16:26:08: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:08: +------+-------------+-------+-------------+-------+
INFO - 16:26:08: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:08: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:08:
INFO - 16:26:08: ... 3%|▎ | 1/30 [00:00<00:00, 985.74 it/sec, obj=-3.32]
INFO - 16:26:08:
WARNING - 16:26:08: Optimization found no feasible point ! The least infeasible point is selected.
INFO - 16:26:08:
INFO - 16:26:08: Optimization result:
INFO - 16:26:08: Optimizer info:
INFO - 16:26:08: Status: 8
INFO - 16:26:08: Message: Positive directional derivative for linesearch
INFO - 16:26:08: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:08: Solution:
WARNING - 16:26:08: The solution is not feasible.
INFO - 16:26:08: Objective: -3.3171632100551673
INFO - 16:26:08: Standardized constraints:
INFO - 16:26:08: g_2 = 0.010000000000000009
INFO - 16:26:08: Design space:
INFO - 16:26:08: +------+-------------+-------+-------------+-------+
INFO - 16:26:08: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:08: +------+-------------+-------+-------------+-------+
INFO - 16:26:08: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:08: +------+-------------+-------+-------------+-------+
INFO - 16:26:08: *** End AerodynamicsScenario execution (time: 0:00:00.020459) ***
INFO - 16:26:08:
INFO - 16:26:08: *** Start StructureScenario execution ***
INFO - 16:26:08: StructureScenario
INFO - 16:26:08: Disciplines: SobieskiStructure
INFO - 16:26:08: MDO formulation: DisciplinaryOpt
INFO - 16:26:08: Optimization problem:
INFO - 16:26:08: minimize -y_11(x_1)
INFO - 16:26:08: with respect to x_1
INFO - 16:26:08: subject to constraints:
INFO - 16:26:08: g_1(x_1) <= 0.0
INFO - 16:26:08: over the design space:
INFO - 16:26:08: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:08: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:08: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:08: | x_1[0] | 0.1 | 0.3999999999999848 | 0.4 | float |
INFO - 16:26:08: | x_1[1] | 0.75 | 0.7500000000000006 | 1.25 | float |
INFO - 16:26:08: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:08: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:08: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:08:
INFO - 16:26:08: ... 3%|▎ | 1/30 [00:00<00:00, 571.51 it/sec, obj=-.272]
INFO - 16:26:08:
INFO - 16:26:08: ... 7%|▋ | 2/30 [00:00<00:00, 256.13 it/sec, obj=-.272]
INFO - 16:26:08:
INFO - 16:26:08:
INFO - 16:26:08: Optimization result:
INFO - 16:26:08: Optimizer info:
INFO - 16:26:08: Status: 8
INFO - 16:26:08: Message: Positive directional derivative for linesearch
INFO - 16:26:08: Number of calls to the objective function by the optimizer: 3
INFO - 16:26:08: Solution:
INFO - 16:26:08: The solution is feasible.
INFO - 16:26:08: Objective: -0.2721681413246109
INFO - 16:26:08: Standardized constraints:
INFO - 16:26:08: g_1 = [-0.02505357 -0.02542063 -0.03358482 -0.04103714 -0.04706944 -0.20645898
INFO - 16:26:08: -0.03354102]
INFO - 16:26:08: Design space:
INFO - 16:26:08: +--------+-------------+-------+-------------+-------+
INFO - 16:26:08: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:08: +--------+-------------+-------+-------------+-------+
INFO - 16:26:08: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:26:08: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:08: +--------+-------------+-------+-------------+-------+
INFO - 16:26:08: *** End StructureScenario execution (time: 0:00:00.023557) ***
INFO - 16:26:08: ... 6%|▌ | 3/50 [00:00<00:12, 3.75 it/sec, obj=-813]
INFO - 16:26:08:
INFO - 16:26:08: *** Start PropulsionScenario execution ***
INFO - 16:26:08: PropulsionScenario
INFO - 16:26:08: Disciplines: SobieskiPropulsion
INFO - 16:26:08: MDO formulation: DisciplinaryOpt
INFO - 16:26:09: Optimization problem:
INFO - 16:26:09: minimize y_34(x_3)
INFO - 16:26:09: with respect to x_3
INFO - 16:26:09: subject to constraints:
INFO - 16:26:09: g_3(x_3) <= 0.0
INFO - 16:26:09: over the design space:
INFO - 16:26:09: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:09: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:09: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:09: | x_3 | 0.1 | 0.2871004772038966 | 1 | float |
INFO - 16:26:09: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:09: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:09: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:09:
INFO - 16:26:09: ... 3%|▎ | 1/30 [00:00<00:00, 986.90 it/sec, obj=1.16]
INFO - 16:26:09:
INFO - 16:26:09: ... 7%|▋ | 2/30 [00:00<00:00, 408.92 it/sec, obj=1.14]
INFO - 16:26:09:
INFO - 16:26:09: ... 10%|█ | 3/30 [00:00<00:00, 394.55 it/sec, obj=1.14]
INFO - 16:26:09:
INFO - 16:26:09: ... 13%|█▎ | 4/30 [00:00<00:00, 413.86 it/sec, obj=1.14]
INFO - 16:26:09:
INFO - 16:26:09:
INFO - 16:26:09: Optimization result:
INFO - 16:26:09: Optimizer info:
INFO - 16:26:09: Status: None
INFO - 16:26:09: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:26:09: Number of calls to the objective function by the optimizer: 5
INFO - 16:26:09: Solution:
INFO - 16:26:09: The solution is feasible.
INFO - 16:26:09: Objective: 1.137722098693054
INFO - 16:26:09: Standardized constraints:
INFO - 16:26:09: g_3 = [-7.10555843e-01 -2.89444157e-01 6.66133815e-16 -1.11370139e-01]
INFO - 16:26:09: Design space:
INFO - 16:26:09: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:09: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:09: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:09: | x_3 | 0.1 | 0.3243399096603405 | 1 | float |
INFO - 16:26:09: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:09: *** End PropulsionScenario execution (time: 0:00:00.021634) ***
INFO - 16:26:09:
INFO - 16:26:09: *** Start AerodynamicsScenario execution ***
INFO - 16:26:09: AerodynamicsScenario
INFO - 16:26:09: Disciplines: SobieskiAerodynamics
INFO - 16:26:09: MDO formulation: DisciplinaryOpt
INFO - 16:26:09: Optimization problem:
INFO - 16:26:09: minimize -y_24(x_2)
INFO - 16:26:09: with respect to x_2
INFO - 16:26:09: subject to constraints:
INFO - 16:26:09: g_2(x_2) <= 0.0
INFO - 16:26:09: over the design space:
INFO - 16:26:09: +------+-------------+-------+-------------+-------+
INFO - 16:26:09: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:09: +------+-------------+-------+-------------+-------+
INFO - 16:26:09: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:09: +------+-------------+-------+-------------+-------+
INFO - 16:26:09: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:09: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:09:
INFO - 16:26:09: ... 3%|▎ | 1/30 [00:00<00:00, 941.27 it/sec, obj=-3.31]
INFO - 16:26:09:
WARNING - 16:26:09: Optimization found no feasible point ! The least infeasible point is selected.
INFO - 16:26:09:
INFO - 16:26:09: Optimization result:
INFO - 16:26:09: Optimizer info:
INFO - 16:26:09: Status: 8
INFO - 16:26:09: Message: Positive directional derivative for linesearch
INFO - 16:26:09: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:09: Solution:
WARNING - 16:26:09: The solution is not feasible.
INFO - 16:26:09: Objective: -3.3146292282019347
INFO - 16:26:09: Standardized constraints:
INFO - 16:26:09: g_2 = 0.010000000000000009
INFO - 16:26:09: Design space:
INFO - 16:26:09: +------+-------------+-------+-------------+-------+
INFO - 16:26:09: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:09: +------+-------------+-------+-------------+-------+
INFO - 16:26:09: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:09: +------+-------------+-------+-------------+-------+
INFO - 16:26:09: *** End AerodynamicsScenario execution (time: 0:00:00.015093) ***
INFO - 16:26:09:
INFO - 16:26:09: *** Start StructureScenario execution ***
INFO - 16:26:09: StructureScenario
INFO - 16:26:09: Disciplines: SobieskiStructure
INFO - 16:26:09: MDO formulation: DisciplinaryOpt
INFO - 16:26:09: Optimization problem:
INFO - 16:26:09: minimize -y_11(x_1)
INFO - 16:26:09: with respect to x_1
INFO - 16:26:09: subject to constraints:
INFO - 16:26:09: g_1(x_1) <= 0.0
INFO - 16:26:09: over the design space:
INFO - 16:26:09: +--------+-------------+-------+-------------+-------+
INFO - 16:26:09: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:09: +--------+-------------+-------+-------------+-------+
INFO - 16:26:09: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:26:09: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:09: +--------+-------------+-------+-------------+-------+
INFO - 16:26:09: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:09: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:09:
INFO - 16:26:09: ... 3%|▎ | 1/30 [00:00<00:00, 575.98 it/sec, obj=-.274]
INFO - 16:26:09:
INFO - 16:26:09:
INFO - 16:26:09: Optimization result:
INFO - 16:26:09: Optimizer info:
INFO - 16:26:09: Status: 8
INFO - 16:26:09: Message: Positive directional derivative for linesearch
INFO - 16:26:09: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:09: Solution:
INFO - 16:26:09: The solution is feasible.
INFO - 16:26:09: Objective: -0.2737879545502587
INFO - 16:26:09: Standardized constraints:
INFO - 16:26:09: g_1 = [-0.02505357 -0.02542063 -0.03358482 -0.04103714 -0.04706944 -0.20645898
INFO - 16:26:09: -0.03354102]
INFO - 16:26:09: Design space:
INFO - 16:26:09: +--------+-------------+-------+-------------+-------+
INFO - 16:26:09: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:09: +--------+-------------+-------+-------------+-------+
INFO - 16:26:09: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:26:09: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:09: +--------+-------------+-------+-------------+-------+
INFO - 16:26:09: *** End StructureScenario execution (time: 0:00:00.017406) ***
INFO - 16:26:09: ... 8%|▊ | 4/50 [00:01<00:11, 3.84 it/sec, obj=-751]
INFO - 16:26:09:
INFO - 16:26:09: *** Start PropulsionScenario execution ***
INFO - 16:26:09: PropulsionScenario
INFO - 16:26:09: Disciplines: SobieskiPropulsion
INFO - 16:26:09: MDO formulation: DisciplinaryOpt
INFO - 16:26:09: Optimization problem:
INFO - 16:26:09: minimize y_34(x_3)
INFO - 16:26:09: with respect to x_3
INFO - 16:26:09: subject to constraints:
INFO - 16:26:09: g_3(x_3) <= 0.0
INFO - 16:26:09: over the design space:
INFO - 16:26:09: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:09: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:09: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:09: | x_3 | 0.1 | 0.3243399096603405 | 1 | float |
INFO - 16:26:09: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:09: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:09: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:09:
INFO - 16:26:09: ... 3%|▎ | 1/30 [00:00<00:00, 1661.77 it/sec, obj=1.1]
INFO - 16:26:09:
INFO - 16:26:09: ... 7%|▋ | 2/30 [00:00<00:00, 437.07 it/sec, obj=1.12]
INFO - 16:26:09:
INFO - 16:26:09: ... 10%|█ | 3/30 [00:00<00:00, 494.16 it/sec, obj=1.1]
INFO - 16:26:09:
INFO - 16:26:09: ... 13%|█▎ | 4/30 [00:00<00:00, 425.62 it/sec, obj=1.12]
INFO - 16:26:09:
INFO - 16:26:09: ... 17%|█▋ | 5/30 [00:00<00:00, 395.60 it/sec, obj=1.12]
INFO - 16:26:09:
INFO - 16:26:09: ... 20%|██ | 6/30 [00:00<00:00, 323.33 it/sec, obj=1.12]
INFO - 16:26:09:
INFO - 16:26:09:
INFO - 16:26:09: Optimization result:
INFO - 16:26:09: Optimizer info:
INFO - 16:26:09: Status: None
INFO - 16:26:09: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:26:09: Number of calls to the objective function by the optimizer: 14
INFO - 16:26:09: Solution:
INFO - 16:26:09: The solution is feasible.
INFO - 16:26:09: Objective: 1.1169456193906955
INFO - 16:26:09: Standardized constraints:
INFO - 16:26:09: g_3 = [-7.20597051e-01 -2.79402949e-01 2.22044605e-16 -1.27460556e-01]
INFO - 16:26:09: Design space:
INFO - 16:26:09: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:09: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:09: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:09: | x_3 | 0.1 | 0.2871004772038968 | 1 | float |
INFO - 16:26:09: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:09: *** End PropulsionScenario execution (time: 0:00:00.030433) ***
INFO - 16:26:09:
INFO - 16:26:09: *** Start AerodynamicsScenario execution ***
INFO - 16:26:09: AerodynamicsScenario
INFO - 16:26:09: Disciplines: SobieskiAerodynamics
INFO - 16:26:09: MDO formulation: DisciplinaryOpt
INFO - 16:26:09: Optimization problem:
INFO - 16:26:09: minimize -y_24(x_2)
INFO - 16:26:09: with respect to x_2
INFO - 16:26:09: subject to constraints:
INFO - 16:26:09: g_2(x_2) <= 0.0
INFO - 16:26:09: over the design space:
INFO - 16:26:09: +------+-------------+-------+-------------+-------+
INFO - 16:26:09: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:09: +------+-------------+-------+-------------+-------+
INFO - 16:26:09: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:09: +------+-------------+-------+-------------+-------+
INFO - 16:26:09: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:09: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:09:
INFO - 16:26:09: ... 3%|▎ | 1/30 [00:00<00:00, 910.82 it/sec, obj=-3.38]
INFO - 16:26:09:
INFO - 16:26:09: ... 7%|▋ | 2/30 [00:00<00:00, 388.52 it/sec, obj=-3.38]
INFO - 16:26:09:
INFO - 16:26:09: ... 10%|█ | 3/30 [00:00<00:00, 444.14 it/sec, obj=-3.38]
INFO - 16:26:09:
INFO - 16:26:09: ... 13%|█▎ | 4/30 [00:00<00:00, 470.54 it/sec, obj=-3.38]
INFO - 16:26:09:
INFO - 16:26:09: ... 17%|█▋ | 5/30 [00:00<00:00, 488.88 it/sec, obj=-3.38]
INFO - 16:26:09:
INFO - 16:26:09: ... 20%|██ | 6/30 [00:00<00:00, 502.64 it/sec, obj=-3.38]
INFO - 16:26:09:
INFO - 16:26:09: ... 23%|██▎ | 7/30 [00:00<00:00, 504.24 it/sec, obj=-3.38]
INFO - 16:26:09:
INFO - 16:26:09: ... 27%|██▋ | 8/30 [00:00<00:00, 512.88 it/sec, obj=-3.38]
INFO - 16:26:09:
INFO - 16:26:09: ... 30%|███ | 9/30 [00:00<00:00, 518.99 it/sec, obj=-3.38]
INFO - 16:26:09:
INFO - 16:26:09: ... 33%|███▎ | 10/30 [00:00<00:00, 524.43 it/sec, obj=-3.38]
INFO - 16:26:09:
INFO - 16:26:09: ... 37%|███▋ | 11/30 [00:00<00:00, 407.40 it/sec, obj=-3.38]
INFO - 16:26:09:
INFO - 16:26:09: ... 40%|████ | 12/30 [00:00<00:00, 393.74 it/sec, obj=-3.38]
INFO - 16:26:09:
INFO - 16:26:09: ... 43%|████▎ | 13/30 [00:00<00:00, 403.21 it/sec, obj=-3.38]
INFO - 16:26:09:
INFO - 16:26:09: ... 47%|████▋ | 14/30 [00:00<00:00, 412.01 it/sec, obj=-3.38]
INFO - 16:26:09:
INFO - 16:26:09: ... 50%|█████ | 15/30 [00:00<00:00, 420.23 it/sec, obj=-3.38]
INFO - 16:26:09:
INFO - 16:26:09: ... 53%|█████▎ | 16/30 [00:00<00:00, 427.43 it/sec, obj=-3.38]
INFO - 16:26:09:
INFO - 16:26:09: ... 57%|█████▋ | 17/30 [00:00<00:00, 434.04 it/sec, obj=-3.38]
INFO - 16:26:09:
INFO - 16:26:09: ... 60%|██████ | 18/30 [00:00<00:00, 440.07 it/sec, obj=-3.38]
INFO - 16:26:09:
INFO - 16:26:09: ... 63%|██████▎ | 19/30 [00:00<00:00, 445.64 it/sec, obj=-3.38]
INFO - 16:26:09:
INFO - 16:26:09: ... 67%|██████▋ | 20/30 [00:00<00:00, 450.64 it/sec, obj=-3.38]
INFO - 16:26:09:
INFO - 16:26:09: ... 70%|███████ | 21/30 [00:00<00:00, 455.37 it/sec, obj=-3.38]
INFO - 16:26:09:
INFO - 16:26:09: ... 73%|███████▎ | 22/30 [00:00<00:00, 459.93 it/sec, obj=-3.38]
INFO - 16:26:09:
INFO - 16:26:09: ... 77%|███████▋ | 23/30 [00:00<00:00, 448.10 it/sec, obj=-3.38]
INFO - 16:26:09:
INFO - 16:26:09: ... 80%|████████ | 24/30 [00:00<00:00, 452.16 it/sec, obj=-3.38]
INFO - 16:26:09:
INFO - 16:26:09: ... 83%|████████▎ | 25/30 [00:00<00:00, 456.14 it/sec, obj=-3.38]
INFO - 16:26:09:
INFO - 16:26:09: ... 87%|████████▋ | 26/30 [00:00<00:00, 459.85 it/sec, obj=-3.38]
INFO - 16:26:09:
INFO - 16:26:09: ... 90%|█████████ | 27/30 [00:00<00:00, 463.44 it/sec, obj=-3.38]
INFO - 16:26:09:
INFO - 16:26:09: ... 93%|█████████▎| 28/30 [00:00<00:00, 465.67 it/sec, obj=-3.38]
INFO - 16:26:09:
INFO - 16:26:09: ... 97%|█████████▋| 29/30 [00:00<00:00, 468.65 it/sec, obj=-3.38]
INFO - 16:26:09:
INFO - 16:26:09: ... 100%|██████████| 30/30 [00:00<00:00, 466.59 it/sec, obj=-3.38]
INFO - 16:26:09:
WARNING - 16:26:09: Optimization found no feasible point ! The least infeasible point is selected.
INFO - 16:26:09:
INFO - 16:26:09: Optimization result:
INFO - 16:26:09: Optimizer info:
INFO - 16:26:09: Status: None
INFO - 16:26:09: Message: Maximum number of iterations reached. GEMSEO Stopped the driver
INFO - 16:26:09: Number of calls to the objective function by the optimizer: 81
INFO - 16:26:09: Solution:
WARNING - 16:26:09: The solution is not feasible.
INFO - 16:26:09: Objective: -3.3833585466979232
INFO - 16:26:09: Standardized constraints:
INFO - 16:26:09: g_2 = 0.010000000000000009
INFO - 16:26:09: Design space:
INFO - 16:26:09: +------+-------------+-------+-------------+-------+
INFO - 16:26:09: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:09: +------+-------------+-------+-------------+-------+
INFO - 16:26:09: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:09: +------+-------------+-------+-------------+-------+
INFO - 16:26:09: *** End AerodynamicsScenario execution (time: 0:00:00.077525) ***
INFO - 16:26:09:
INFO - 16:26:09: *** Start StructureScenario execution ***
INFO - 16:26:09: StructureScenario
INFO - 16:26:09: Disciplines: SobieskiStructure
INFO - 16:26:09: MDO formulation: DisciplinaryOpt
INFO - 16:26:09: Optimization problem:
INFO - 16:26:09: minimize -y_11(x_1)
INFO - 16:26:09: with respect to x_1
INFO - 16:26:09: subject to constraints:
INFO - 16:26:09: g_1(x_1) <= 0.0
INFO - 16:26:09: over the design space:
INFO - 16:26:09: +--------+-------------+-------+-------------+-------+
INFO - 16:26:09: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:09: +--------+-------------+-------+-------------+-------+
INFO - 16:26:09: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:26:09: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:09: +--------+-------------+-------+-------------+-------+
INFO - 16:26:09: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:09: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:09:
INFO - 16:26:09: ... 3%|▎ | 1/30 [00:00<00:00, 577.25 it/sec, obj=-.256]
INFO - 16:26:09:
INFO - 16:26:09: ... 7%|▋ | 2/30 [00:00<00:00, 241.20 it/sec, obj=-.233]
INFO - 16:26:09:
INFO - 16:26:09: ... 10%|█ | 3/30 [00:00<00:00, 224.33 it/sec, obj=-.237]
INFO - 16:26:09:
INFO - 16:26:09: ... 13%|█▎ | 4/30 [00:00<00:00, 209.77 it/sec, obj=-.255]
INFO - 16:26:09:
INFO - 16:26:09: ... 17%|█▋ | 5/30 [00:00<00:00, 202.76 it/sec, obj=-.255]
INFO - 16:26:09:
INFO - 16:26:09: ... 20%|██ | 6/30 [00:00<00:00, 198.65 it/sec, obj=-.255]
INFO - 16:26:09:
INFO - 16:26:09: ... 23%|██▎ | 7/30 [00:00<00:00, 195.68 it/sec, obj=-.255]
INFO - 16:26:09:
INFO - 16:26:09: ... 27%|██▋ | 8/30 [00:00<00:00, 193.52 it/sec, obj=-.255]
INFO - 16:26:09:
INFO - 16:26:09:
INFO - 16:26:09: Optimization result:
INFO - 16:26:09: Optimizer info:
INFO - 16:26:09: Status: None
INFO - 16:26:09: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:26:09: Number of calls to the objective function by the optimizer: 9
INFO - 16:26:09: Solution:
INFO - 16:26:09: The solution is feasible.
INFO - 16:26:09: Objective: -0.25541043890623544
INFO - 16:26:09: Standardized constraints:
INFO - 16:26:09: g_1 = [-2.87847242e-02 -1.88000814e-02 -2.52039105e-02 -3.26929762e-02
INFO - 16:26:09: -3.92051733e-02 -2.40000000e-01 -8.00570721e-12]
INFO - 16:26:09: Design space:
INFO - 16:26:09: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:09: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:09: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:09: | x_1[0] | 0.1 | 0.2842628772739993 | 0.4 | float |
INFO - 16:26:09: | x_1[1] | 0.75 | 0.7500000000000004 | 1.25 | float |
INFO - 16:26:09: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:09: *** End StructureScenario execution (time: 0:00:00.053936) ***
INFO - 16:26:09: ... 10%|█ | 5/50 [00:01<00:12, 3.65 it/sec, obj=-734]
INFO - 16:26:09:
INFO - 16:26:09: *** Start PropulsionScenario execution ***
INFO - 16:26:09: PropulsionScenario
INFO - 16:26:09: Disciplines: SobieskiPropulsion
INFO - 16:26:09: MDO formulation: DisciplinaryOpt
INFO - 16:26:09: Optimization problem:
INFO - 16:26:09: minimize y_34(x_3)
INFO - 16:26:09: with respect to x_3
INFO - 16:26:09: subject to constraints:
INFO - 16:26:09: g_3(x_3) <= 0.0
INFO - 16:26:09: over the design space:
INFO - 16:26:09: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:09: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:09: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:09: | x_3 | 0.1 | 0.2871004772038968 | 1 | float |
INFO - 16:26:09: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:09: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:09: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:09:
INFO - 16:26:09: ... 3%|▎ | 1/30 [00:00<00:00, 1762.31 it/sec, obj=1.12]
INFO - 16:26:09:
INFO - 16:26:09:
INFO - 16:26:09: Optimization result:
INFO - 16:26:09: Optimizer info:
INFO - 16:26:09: Status: 8
INFO - 16:26:09: Message: Positive directional derivative for linesearch
INFO - 16:26:09: Number of calls to the objective function by the optimizer: 17
INFO - 16:26:09: Solution:
INFO - 16:26:09: The solution is feasible.
INFO - 16:26:09: Objective: 1.1169456193906955
INFO - 16:26:09: Standardized constraints:
INFO - 16:26:09: g_3 = [-8.42352689e-01 -1.57647311e-01 2.22044605e-16 -1.27460556e-01]
INFO - 16:26:09: Design space:
INFO - 16:26:09: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:09: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:09: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:09: | x_3 | 0.1 | 0.2871004772038968 | 1 | float |
INFO - 16:26:09: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:09: *** End PropulsionScenario execution (time: 0:00:00.022741) ***
INFO - 16:26:09:
INFO - 16:26:09: *** Start AerodynamicsScenario execution ***
INFO - 16:26:09: AerodynamicsScenario
INFO - 16:26:09: Disciplines: SobieskiAerodynamics
INFO - 16:26:09: MDO formulation: DisciplinaryOpt
INFO - 16:26:09: Optimization problem:
INFO - 16:26:09: minimize -y_24(x_2)
INFO - 16:26:09: with respect to x_2
INFO - 16:26:09: subject to constraints:
INFO - 16:26:09: g_2(x_2) <= 0.0
INFO - 16:26:09: over the design space:
INFO - 16:26:09: +------+-------------+-------+-------------+-------+
INFO - 16:26:09: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:09: +------+-------------+-------+-------------+-------+
INFO - 16:26:09: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:09: +------+-------------+-------+-------------+-------+
INFO - 16:26:09: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:09: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:09:
INFO - 16:26:09: ... 3%|▎ | 1/30 [00:00<00:00, 1689.21 it/sec, obj=-4.01]
INFO - 16:26:09:
WARNING - 16:26:09: Optimization found no feasible point ! The least infeasible point is selected.
INFO - 16:26:09:
INFO - 16:26:09: Optimization result:
INFO - 16:26:09: Optimizer info:
INFO - 16:26:09: Status: 8
INFO - 16:26:09: Message: Positive directional derivative for linesearch
INFO - 16:26:09: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:09: Solution:
WARNING - 16:26:09: The solution is not feasible.
INFO - 16:26:09: Objective: -4.010763549231421
INFO - 16:26:09: Standardized constraints:
INFO - 16:26:09: g_2 = 0.010000000000000009
INFO - 16:26:09: Design space:
INFO - 16:26:09: +------+-------------+-------+-------------+-------+
INFO - 16:26:09: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:09: +------+-------------+-------+-------------+-------+
INFO - 16:26:09: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:09: +------+-------------+-------+-------------+-------+
INFO - 16:26:09: *** End AerodynamicsScenario execution (time: 0:00:00.014575) ***
INFO - 16:26:09:
INFO - 16:26:09: *** Start StructureScenario execution ***
INFO - 16:26:09: StructureScenario
INFO - 16:26:09: Disciplines: SobieskiStructure
INFO - 16:26:09: MDO formulation: DisciplinaryOpt
INFO - 16:26:09: Optimization problem:
INFO - 16:26:09: minimize -y_11(x_1)
INFO - 16:26:09: with respect to x_1
INFO - 16:26:09: subject to constraints:
INFO - 16:26:09: g_1(x_1) <= 0.0
INFO - 16:26:09: over the design space:
INFO - 16:26:09: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:09: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:09: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:09: | x_1[0] | 0.1 | 0.2842628772739993 | 0.4 | float |
INFO - 16:26:09: | x_1[1] | 0.75 | 0.7500000000000004 | 1.25 | float |
INFO - 16:26:09: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:09: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:09: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:09:
INFO - 16:26:09: ... 3%|▎ | 1/30 [00:00<00:00, 1743.99 it/sec, obj=-.297]
INFO - 16:26:09:
INFO - 16:26:09: ... 7%|▋ | 2/30 [00:00<00:00, 297.08 it/sec, obj=-.297]
INFO - 16:26:09:
INFO - 16:26:09: ... 10%|█ | 3/30 [00:00<00:00, 253.49 it/sec, obj=-.297]
INFO - 16:26:09:
INFO - 16:26:09: ... 13%|█▎ | 4/30 [00:00<00:00, 229.61 it/sec, obj=-.297]
INFO - 16:26:09:
INFO - 16:26:09: ... 17%|█▋ | 5/30 [00:00<00:00, 217.38 it/sec, obj=-.297]
INFO - 16:26:09:
INFO - 16:26:09: ... 20%|██ | 6/30 [00:00<00:00, 207.68 it/sec, obj=-.297]
INFO - 16:26:09:
INFO - 16:26:09:
INFO - 16:26:09: Optimization result:
INFO - 16:26:09: Optimizer info:
INFO - 16:26:09: Status: 8
INFO - 16:26:09: Message: Positive directional derivative for linesearch
INFO - 16:26:09: Number of calls to the objective function by the optimizer: 7
INFO - 16:26:09: Solution:
INFO - 16:26:09: The solution is feasible.
INFO - 16:26:09: Objective: -0.29713711523465847
INFO - 16:26:09: Standardized constraints:
INFO - 16:26:09: g_1 = [-0.02505357 -0.02542063 -0.03358482 -0.04103714 -0.04706944 -0.20645898
INFO - 16:26:09: -0.03354102]
INFO - 16:26:09: Design space:
INFO - 16:26:09: +--------+-------------+-------+-------------+-------+
INFO - 16:26:09: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:09: +--------+-------------+-------+-------------+-------+
INFO - 16:26:09: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:26:09: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:09: +--------+-------------+-------+-------------+-------+
INFO - 16:26:09: *** End StructureScenario execution (time: 0:00:00.044486) ***
INFO - 16:26:09: ... 12%|█▏ | 6/50 [00:01<00:11, 3.81 it/sec, obj=-977]
INFO - 16:26:09:
INFO - 16:26:09: *** Start PropulsionScenario execution ***
INFO - 16:26:09: PropulsionScenario
INFO - 16:26:09: Disciplines: SobieskiPropulsion
INFO - 16:26:09: MDO formulation: DisciplinaryOpt
INFO - 16:26:09: Optimization problem:
INFO - 16:26:09: minimize y_34(x_3)
INFO - 16:26:09: with respect to x_3
INFO - 16:26:09: subject to constraints:
INFO - 16:26:09: g_3(x_3) <= 0.0
INFO - 16:26:09: over the design space:
INFO - 16:26:09: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:09: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:09: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:09: | x_3 | 0.1 | 0.2871004772038968 | 1 | float |
INFO - 16:26:09: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:09: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:09: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:09:
INFO - 16:26:09: ... 3%|▎ | 1/30 [00:00<00:00, 1801.68 it/sec, obj=1.12]
INFO - 16:26:09:
INFO - 16:26:09:
INFO - 16:26:09: Optimization result:
INFO - 16:26:09: Optimizer info:
INFO - 16:26:09: Status: 8
INFO - 16:26:09: Message: Positive directional derivative for linesearch
INFO - 16:26:09: Number of calls to the objective function by the optimizer: 17
INFO - 16:26:09: Solution:
INFO - 16:26:09: The solution is feasible.
INFO - 16:26:09: Objective: 1.1169456193906955
INFO - 16:26:09: Standardized constraints:
INFO - 16:26:09: g_3 = [-6.70083434e-01 -3.29916566e-01 2.22044605e-16 -1.27460556e-01]
INFO - 16:26:09: Design space:
INFO - 16:26:09: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:09: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:09: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:09: | x_3 | 0.1 | 0.2871004772038968 | 1 | float |
INFO - 16:26:09: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:09: *** End PropulsionScenario execution (time: 0:00:00.021760) ***
INFO - 16:26:09:
INFO - 16:26:09: *** Start AerodynamicsScenario execution ***
INFO - 16:26:09: AerodynamicsScenario
INFO - 16:26:09: Disciplines: SobieskiAerodynamics
INFO - 16:26:09: MDO formulation: DisciplinaryOpt
INFO - 16:26:09: Optimization problem:
INFO - 16:26:09: minimize -y_24(x_2)
INFO - 16:26:09: with respect to x_2
INFO - 16:26:09: subject to constraints:
INFO - 16:26:09: g_2(x_2) <= 0.0
INFO - 16:26:09: over the design space:
INFO - 16:26:09: +------+-------------+-------+-------------+-------+
INFO - 16:26:09: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:09: +------+-------------+-------+-------------+-------+
INFO - 16:26:09: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:09: +------+-------------+-------+-------------+-------+
INFO - 16:26:09: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:09: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:09:
INFO - 16:26:09: ... 3%|▎ | 1/30 [00:00<00:00, 964.87 it/sec, obj=-3.5]
INFO - 16:26:09:
WARNING - 16:26:09: Optimization found no feasible point ! The least infeasible point is selected.
INFO - 16:26:09:
INFO - 16:26:09: Optimization result:
INFO - 16:26:09: Optimizer info:
INFO - 16:26:09: Status: 8
INFO - 16:26:09: Message: Positive directional derivative for linesearch
INFO - 16:26:09: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:09: Solution:
WARNING - 16:26:09: The solution is not feasible.
INFO - 16:26:09: Objective: -3.4989599823565998
INFO - 16:26:09: Standardized constraints:
INFO - 16:26:09: g_2 = 0.010000000000000009
INFO - 16:26:09: Design space:
INFO - 16:26:09: +------+-------------+-------+-------------+-------+
INFO - 16:26:09: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:09: +------+-------------+-------+-------------+-------+
INFO - 16:26:09: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:09: +------+-------------+-------+-------------+-------+
INFO - 16:26:09: *** End AerodynamicsScenario execution (time: 0:00:00.020254) ***
INFO - 16:26:09:
INFO - 16:26:09: *** Start StructureScenario execution ***
INFO - 16:26:09: StructureScenario
INFO - 16:26:09: Disciplines: SobieskiStructure
INFO - 16:26:09: MDO formulation: DisciplinaryOpt
INFO - 16:26:09: Optimization problem:
INFO - 16:26:09: minimize -y_11(x_1)
INFO - 16:26:09: with respect to x_1
INFO - 16:26:09: subject to constraints:
INFO - 16:26:09: g_1(x_1) <= 0.0
INFO - 16:26:09: over the design space:
INFO - 16:26:09: +--------+-------------+-------+-------------+-------+
INFO - 16:26:09: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:09: +--------+-------------+-------+-------------+-------+
INFO - 16:26:09: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:26:09: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:09: +--------+-------------+-------+-------------+-------+
INFO - 16:26:09: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:09: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:09:
INFO - 16:26:09: ... 3%|▎ | 1/30 [00:00<00:00, 593.17 it/sec, obj=-.366]
INFO - 16:26:09:
INFO - 16:26:09: ... 7%|▋ | 2/30 [00:00<00:00, 256.63 it/sec, obj=-.342]
INFO - 16:26:09:
INFO - 16:26:09: ... 10%|█ | 3/30 [00:00<00:00, 233.03 it/sec, obj=-.365]
INFO - 16:26:09:
INFO - 16:26:09: ... 13%|█▎ | 4/30 [00:00<00:00, 215.53 it/sec, obj=-.365]
INFO - 16:26:09:
INFO - 16:26:09: ... 17%|█▋ | 5/30 [00:00<00:00, 206.66 it/sec, obj=-.365]
INFO - 16:26:09:
INFO - 16:26:09: ... 20%|██ | 6/30 [00:00<00:00, 201.69 it/sec, obj=-.365]
INFO - 16:26:09:
INFO - 16:26:09:
INFO - 16:26:09: Optimization result:
INFO - 16:26:09: Optimizer info:
INFO - 16:26:09: Status: None
INFO - 16:26:09: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:26:09: Number of calls to the objective function by the optimizer: 7
INFO - 16:26:09: Solution:
INFO - 16:26:09: The solution is feasible.
INFO - 16:26:09: Objective: -0.36496565666784275
INFO - 16:26:09: Standardized constraints:
INFO - 16:26:09: g_1 = [-2.58485524e-02 -1.74692489e-02 -2.44407670e-02 -3.21952521e-02
INFO - 16:26:09: -3.88530648e-02 -2.40000000e-01 -9.75552972e-13]
INFO - 16:26:09: Design space:
INFO - 16:26:09: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:09: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:09: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:09: | x_1[0] | 0.1 | 0.3050815823000734 | 0.4 | float |
INFO - 16:26:09: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:09: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:09: *** End StructureScenario execution (time: 0:00:00.041561) ***
INFO - 16:26:09: ... 14%|█▍ | 7/50 [00:01<00:11, 3.72 it/sec, obj=-1.05e+3]
INFO - 16:26:10:
INFO - 16:26:10: *** Start PropulsionScenario execution ***
INFO - 16:26:10: PropulsionScenario
INFO - 16:26:10: Disciplines: SobieskiPropulsion
INFO - 16:26:10: MDO formulation: DisciplinaryOpt
INFO - 16:26:10: Optimization problem:
INFO - 16:26:10: minimize y_34(x_3)
INFO - 16:26:10: with respect to x_3
INFO - 16:26:10: subject to constraints:
INFO - 16:26:10: g_3(x_3) <= 0.0
INFO - 16:26:10: over the design space:
INFO - 16:26:10: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:10: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:10: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:10: | x_3 | 0.1 | 0.2871004772038968 | 1 | float |
INFO - 16:26:10: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:10: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:10: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:10:
INFO - 16:26:10: ... 3%|▎ | 1/30 [00:00<00:00, 1764.54 it/sec, obj=1.04]
INFO - 16:26:10:
INFO - 16:26:10: ... 7%|▋ | 2/30 [00:00<00:00, 456.37 it/sec, obj=1.07]
INFO - 16:26:10:
INFO - 16:26:10: ... 10%|█ | 3/30 [00:00<00:00, 510.98 it/sec, obj=1.05]
INFO - 16:26:10:
INFO - 16:26:10: ... 13%|█▎ | 4/30 [00:00<00:00, 435.61 it/sec, obj=1.07]
INFO - 16:26:10:
INFO - 16:26:10: ... 17%|█▋ | 5/30 [00:00<00:00, 351.61 it/sec, obj=1.07]
INFO - 16:26:10:
INFO - 16:26:10: ... 20%|██ | 6/30 [00:00<00:00, 369.11 it/sec, obj=1.07]
INFO - 16:26:10:
INFO - 16:26:10:
INFO - 16:26:10: Optimization result:
INFO - 16:26:10: Optimizer info:
INFO - 16:26:10: Status: None
INFO - 16:26:10: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:26:10: Number of calls to the objective function by the optimizer: 8
INFO - 16:26:10: Solution:
INFO - 16:26:10: The solution is feasible.
INFO - 16:26:10: Objective: 1.0733793462031596
INFO - 16:26:10: Standardized constraints:
INFO - 16:26:10: g_3 = [-0.72171604 -0.27828396 0. -0.15721712]
INFO - 16:26:10: Design space:
INFO - 16:26:10: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:10: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:10: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:10: | x_3 | 0.1 | 0.2068477480804932 | 1 | float |
INFO - 16:26:10: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:10: *** End PropulsionScenario execution (time: 0:00:00.028106) ***
INFO - 16:26:10:
INFO - 16:26:10: *** Start AerodynamicsScenario execution ***
INFO - 16:26:10: AerodynamicsScenario
INFO - 16:26:10: Disciplines: SobieskiAerodynamics
INFO - 16:26:10: MDO formulation: DisciplinaryOpt
INFO - 16:26:10: Optimization problem:
INFO - 16:26:10: minimize -y_24(x_2)
INFO - 16:26:10: with respect to x_2
INFO - 16:26:10: subject to constraints:
INFO - 16:26:10: g_2(x_2) <= 0.0
INFO - 16:26:10: over the design space:
INFO - 16:26:10: +------+-------------+-------+-------------+-------+
INFO - 16:26:10: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:10: +------+-------------+-------+-------------+-------+
INFO - 16:26:10: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:10: +------+-------------+-------+-------------+-------+
INFO - 16:26:10: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:10: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:10:
INFO - 16:26:10: ... 3%|▎ | 1/30 [00:00<00:00, 967.77 it/sec, obj=-4.65]
INFO - 16:26:10:
WARNING - 16:26:10: Optimization found no feasible point ! The least infeasible point is selected.
INFO - 16:26:10:
INFO - 16:26:10: Optimization result:
INFO - 16:26:10: Optimizer info:
INFO - 16:26:10: Status: 8
INFO - 16:26:10: Message: Positive directional derivative for linesearch
INFO - 16:26:10: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:10: Solution:
WARNING - 16:26:10: The solution is not feasible.
INFO - 16:26:10: Objective: -4.654696008207175
INFO - 16:26:10: Standardized constraints:
INFO - 16:26:10: g_2 = 0.010000000000000009
INFO - 16:26:10: Design space:
INFO - 16:26:10: +------+-------------+-------+-------------+-------+
INFO - 16:26:10: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:10: +------+-------------+-------+-------------+-------+
INFO - 16:26:10: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:10: +------+-------------+-------+-------------+-------+
INFO - 16:26:10: *** End AerodynamicsScenario execution (time: 0:00:00.015030) ***
INFO - 16:26:10:
INFO - 16:26:10: *** Start StructureScenario execution ***
INFO - 16:26:10: StructureScenario
INFO - 16:26:10: Disciplines: SobieskiStructure
INFO - 16:26:10: MDO formulation: DisciplinaryOpt
INFO - 16:26:10: Optimization problem:
INFO - 16:26:10: minimize -y_11(x_1)
INFO - 16:26:10: with respect to x_1
INFO - 16:26:10: subject to constraints:
INFO - 16:26:10: g_1(x_1) <= 0.0
INFO - 16:26:10: over the design space:
INFO - 16:26:10: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:10: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:10: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:10: | x_1[0] | 0.1 | 0.3050815823000734 | 0.4 | float |
INFO - 16:26:10: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:10: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:10: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:10: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:10:
INFO - 16:26:10: ... 3%|▎ | 1/30 [00:00<00:00, 584.00 it/sec, obj=-.394]
INFO - 16:26:10:
INFO - 16:26:10: ... 7%|▋ | 2/30 [00:00<00:00, 256.17 it/sec, obj=-.394]
INFO - 16:26:10:
INFO - 16:26:10: ... 10%|█ | 3/30 [00:00<00:00, 226.40 it/sec, obj=-.394]
INFO - 16:26:10:
INFO - 16:26:10: ... 13%|█▎ | 4/30 [00:00<00:00, 212.17 it/sec, obj=-.394]
INFO - 16:26:10:
INFO - 16:26:10: ... 17%|█▋ | 5/30 [00:00<00:00, 204.24 it/sec, obj=-.394]
INFO - 16:26:10:
INFO - 16:26:10: ... 20%|██ | 6/30 [00:00<00:00, 199.64 it/sec, obj=-.394]
INFO - 16:26:10:
INFO - 16:26:10: ... 23%|██▎ | 7/30 [00:00<00:00, 196.25 it/sec, obj=-.394]
INFO - 16:26:10:
INFO - 16:26:10: ... 27%|██▋ | 8/30 [00:00<00:00, 193.94 it/sec, obj=-.394]
INFO - 16:26:10:
INFO - 16:26:10:
INFO - 16:26:10: Optimization result:
INFO - 16:26:10: Optimizer info:
INFO - 16:26:10: Status: None
INFO - 16:26:10: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:26:10: Number of calls to the objective function by the optimizer: 9
INFO - 16:26:10: Solution:
INFO - 16:26:10: The solution is feasible.
INFO - 16:26:10: Objective: -0.3943234828131065
INFO - 16:26:10: Standardized constraints:
INFO - 16:26:10: g_1 = [-2.18016988e-02 -1.56468526e-02 -2.34022845e-02 -3.15220572e-02
INFO - 16:26:10: -3.83796197e-02 -2.40000000e-01 -3.33066907e-16]
INFO - 16:26:10: Design space:
INFO - 16:26:10: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:10: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:10: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:10: | x_1[0] | 0.1 | 0.3350305463282076 | 0.4 | float |
INFO - 16:26:10: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:10: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:10: *** End StructureScenario execution (time: 0:00:00.053455) ***
INFO - 16:26:10: ... 16%|█▌ | 8/50 [00:02<00:11, 3.72 it/sec, obj=-1.67e+3]
INFO - 16:26:10:
INFO - 16:26:10: *** Start PropulsionScenario execution ***
INFO - 16:26:10: PropulsionScenario
INFO - 16:26:10: Disciplines: SobieskiPropulsion
INFO - 16:26:10: MDO formulation: DisciplinaryOpt
INFO - 16:26:10: Optimization problem:
INFO - 16:26:10: minimize y_34(x_3)
INFO - 16:26:10: with respect to x_3
INFO - 16:26:10: subject to constraints:
INFO - 16:26:10: g_3(x_3) <= 0.0
INFO - 16:26:10: over the design space:
INFO - 16:26:10: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:10: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:10: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:10: | x_3 | 0.1 | 0.2068477480804932 | 1 | float |
INFO - 16:26:10: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:10: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:10: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:10:
INFO - 16:26:10: ... 3%|▎ | 1/30 [00:00<00:00, 1746.17 it/sec, obj=1.03]
INFO - 16:26:10:
INFO - 16:26:10: ... 7%|▋ | 2/30 [00:00<00:00, 453.36 it/sec, obj=1.04]
INFO - 16:26:10:
INFO - 16:26:10: ... 10%|█ | 3/30 [00:00<00:00, 506.56 it/sec, obj=1.03]
INFO - 16:26:10:
INFO - 16:26:10: ... 13%|█▎ | 4/30 [00:00<00:00, 432.02 it/sec, obj=1.04]
INFO - 16:26:10:
INFO - 16:26:10: ... 17%|█▋ | 5/30 [00:00<00:00, 390.55 it/sec, obj=1.04]
INFO - 16:26:10:
INFO - 16:26:10: ... 20%|██ | 6/30 [00:00<00:00, 377.27 it/sec, obj=1.04]
INFO - 16:26:10:
INFO - 16:26:10:
INFO - 16:26:10: Optimization result:
INFO - 16:26:10: Optimizer info:
INFO - 16:26:10: Status: None
INFO - 16:26:10: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:26:10: Number of calls to the objective function by the optimizer: 10
INFO - 16:26:10: Solution:
INFO - 16:26:10: The solution is feasible.
INFO - 16:26:10: Objective: 1.0410444624498805
INFO - 16:26:10: Standardized constraints:
INFO - 16:26:10: g_3 = [-8.51430794e-01 -1.48569206e-01 2.22044605e-16 -1.59690326e-01]
INFO - 16:26:10: Design space:
INFO - 16:26:10: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:10: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:10: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:10: | x_3 | 0.1 | 0.1842648745222338 | 1 | float |
INFO - 16:26:10: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:10: *** End PropulsionScenario execution (time: 0:00:00.028205) ***
INFO - 16:26:10:
INFO - 16:26:10: *** Start AerodynamicsScenario execution ***
INFO - 16:26:10: AerodynamicsScenario
INFO - 16:26:10: Disciplines: SobieskiAerodynamics
INFO - 16:26:10: MDO formulation: DisciplinaryOpt
INFO - 16:26:10: Optimization problem:
INFO - 16:26:10: minimize -y_24(x_2)
INFO - 16:26:10: with respect to x_2
INFO - 16:26:10: subject to constraints:
INFO - 16:26:10: g_2(x_2) <= 0.0
INFO - 16:26:10: over the design space:
INFO - 16:26:10: +------+-------------+-------+-------------+-------+
INFO - 16:26:10: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:10: +------+-------------+-------+-------------+-------+
INFO - 16:26:10: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:10: +------+-------------+-------+-------------+-------+
INFO - 16:26:10: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:10: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:10:
INFO - 16:26:10: ... 3%|▎ | 1/30 [00:00<00:00, 915.39 it/sec, obj=-5.69]
INFO - 16:26:10:
INFO - 16:26:10:
INFO - 16:26:10: Optimization result:
INFO - 16:26:10: Optimizer info:
INFO - 16:26:10: Status: 8
INFO - 16:26:10: Message: Positive directional derivative for linesearch
INFO - 16:26:10: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:10: Solution:
INFO - 16:26:10: The solution is feasible.
INFO - 16:26:10: Objective: -5.6900427487038545
INFO - 16:26:10: Standardized constraints:
INFO - 16:26:10: g_2 = -0.040898733728932046
INFO - 16:26:10: Design space:
INFO - 16:26:10: +------+-------------+-------+-------------+-------+
INFO - 16:26:10: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:10: +------+-------------+-------+-------------+-------+
INFO - 16:26:10: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:10: +------+-------------+-------+-------------+-------+
INFO - 16:26:10: *** End AerodynamicsScenario execution (time: 0:00:00.015049) ***
INFO - 16:26:10:
INFO - 16:26:10: *** Start StructureScenario execution ***
INFO - 16:26:10: StructureScenario
INFO - 16:26:10: Disciplines: SobieskiStructure
INFO - 16:26:10: MDO formulation: DisciplinaryOpt
INFO - 16:26:10: Optimization problem:
INFO - 16:26:10: minimize -y_11(x_1)
INFO - 16:26:10: with respect to x_1
INFO - 16:26:10: subject to constraints:
INFO - 16:26:10: g_1(x_1) <= 0.0
INFO - 16:26:10: over the design space:
INFO - 16:26:10: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:10: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:10: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:10: | x_1[0] | 0.1 | 0.3350305463282076 | 0.4 | float |
INFO - 16:26:10: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:10: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:10: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:10: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:10:
INFO - 16:26:10: ... 3%|▎ | 1/30 [00:00<00:00, 554.14 it/sec, obj=-.387]
INFO - 16:26:10:
INFO - 16:26:10: ... 7%|▋ | 2/30 [00:00<00:00, 249.59 it/sec, obj=-.129]
INFO - 16:26:10:
INFO - 16:26:10: ... 10%|█ | 3/30 [00:00<00:00, 228.73 it/sec, obj=-.163]
INFO - 16:26:10:
INFO - 16:26:10: ... 13%|█▎ | 4/30 [00:00<00:00, 214.56 it/sec, obj=-.171]
INFO - 16:26:10:
INFO - 16:26:10: ... 17%|█▋ | 5/30 [00:00<00:00, 205.93 it/sec, obj=-.172]
INFO - 16:26:10:
INFO - 16:26:10: ... 20%|██ | 6/30 [00:00<00:00, 200.88 it/sec, obj=-.172]
INFO - 16:26:10:
INFO - 16:26:10: ... 23%|██▎ | 7/30 [00:00<00:00, 197.61 it/sec, obj=-.175]
INFO - 16:26:10:
INFO - 16:26:10: ... 27%|██▋ | 8/30 [00:00<00:00, 195.08 it/sec, obj=-.177]
INFO - 16:26:10:
INFO - 16:26:10: ... 30%|███ | 9/30 [00:00<00:00, 191.20 it/sec, obj=-.177]
INFO - 16:26:10:
INFO - 16:26:10: ... 33%|███▎ | 10/30 [00:00<00:00, 189.56 it/sec, obj=-.177]
INFO - 16:26:10:
INFO - 16:26:10: ... 37%|███▋ | 11/30 [00:00<00:00, 197.95 it/sec, obj=-.177]
INFO - 16:26:10:
INFO - 16:26:10:
INFO - 16:26:10: Optimization result:
INFO - 16:26:10: Optimizer info:
INFO - 16:26:10: Status: None
INFO - 16:26:10: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:26:10: Number of calls to the objective function by the optimizer: 12
INFO - 16:26:10: Solution:
INFO - 16:26:10: The solution is feasible.
INFO - 16:26:10: Objective: -0.17693182961895998
INFO - 16:26:10: Standardized constraints:
INFO - 16:26:10: g_1 = [ 7.59660557e-10 -2.91294365e-02 -4.40206163e-02 -5.30597917e-02
INFO - 16:26:10: -5.91294368e-02 -7.67607716e-02 -1.63239228e-01]
INFO - 16:26:10: Design space:
INFO - 16:26:10: +--------+-------------+-------------------+-------------+-------+
INFO - 16:26:10: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:10: +--------+-------------+-------------------+-------------+-------+
INFO - 16:26:10: | x_1[0] | 0.1 | 0.1 | 0.4 | float |
INFO - 16:26:10: | x_1[1] | 0.75 | 1.045173780953992 | 1.25 | float |
INFO - 16:26:10: +--------+-------------+-------------------+-------------+-------+
INFO - 16:26:10: *** End StructureScenario execution (time: 0:00:00.068150) ***
INFO - 16:26:10: ... 18%|█▊ | 9/50 [00:02<00:10, 3.74 it/sec, obj=-1.73e+3]
INFO - 16:26:10:
INFO - 16:26:10: *** Start PropulsionScenario execution ***
INFO - 16:26:10: PropulsionScenario
INFO - 16:26:10: Disciplines: SobieskiPropulsion
INFO - 16:26:10: MDO formulation: DisciplinaryOpt
INFO - 16:26:10: Optimization problem:
INFO - 16:26:10: minimize y_34(x_3)
INFO - 16:26:10: with respect to x_3
INFO - 16:26:10: subject to constraints:
INFO - 16:26:10: g_3(x_3) <= 0.0
INFO - 16:26:10: over the design space:
INFO - 16:26:10: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:10: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:10: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:10: | x_3 | 0.1 | 0.1842648745222338 | 1 | float |
INFO - 16:26:10: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:10: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:10: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:10:
INFO - 16:26:10: ... 3%|▎ | 1/30 [00:00<00:00, 1715.46 it/sec, obj=1.01]
INFO - 16:26:10:
INFO - 16:26:10: ... 7%|▋ | 2/30 [00:00<00:00, 457.27 it/sec, obj=1.02]
INFO - 16:26:10:
INFO - 16:26:10: ... 10%|█ | 3/30 [00:00<00:00, 514.55 it/sec, obj=1.01]
INFO - 16:26:10:
INFO - 16:26:10: ... 13%|█▎ | 4/30 [00:00<00:00, 434.52 it/sec, obj=1.02]
INFO - 16:26:10:
INFO - 16:26:10: ... 17%|█▋ | 5/30 [00:00<00:00, 402.12 it/sec, obj=1.02]
INFO - 16:26:10:
INFO - 16:26:10: ... 20%|██ | 6/30 [00:00<00:00, 415.61 it/sec, obj=1.02]
INFO - 16:26:10:
INFO - 16:26:10:
INFO - 16:26:10: Optimization result:
INFO - 16:26:10: Optimizer info:
INFO - 16:26:10: Status: None
INFO - 16:26:10: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:26:10: Number of calls to the objective function by the optimizer: 7
INFO - 16:26:10: Solution:
INFO - 16:26:10: The solution is feasible.
INFO - 16:26:10: Objective: 1.016000144206171
INFO - 16:26:10: Standardized constraints:
INFO - 16:26:10: g_3 = [-7.31050536e-01 -2.68949464e-01 8.88178420e-16 -1.65753519e-01]
INFO - 16:26:10: Design space:
INFO - 16:26:10: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:10: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:10: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:10: | x_3 | 0.1 | 0.1765337509472551 | 1 | float |
INFO - 16:26:10: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:10: *** End PropulsionScenario execution (time: 0:00:00.026736) ***
INFO - 16:26:10:
INFO - 16:26:10: *** Start AerodynamicsScenario execution ***
INFO - 16:26:10: AerodynamicsScenario
INFO - 16:26:10: Disciplines: SobieskiAerodynamics
INFO - 16:26:10: MDO formulation: DisciplinaryOpt
INFO - 16:26:10: Optimization problem:
INFO - 16:26:10: minimize -y_24(x_2)
INFO - 16:26:10: with respect to x_2
INFO - 16:26:10: subject to constraints:
INFO - 16:26:10: g_2(x_2) <= 0.0
INFO - 16:26:10: over the design space:
INFO - 16:26:10: +------+-------------+-------+-------------+-------+
INFO - 16:26:10: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:10: +------+-------------+-------+-------------+-------+
INFO - 16:26:10: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:10: +------+-------------+-------+-------------+-------+
INFO - 16:26:10: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:10: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:10:
INFO - 16:26:10: ... 3%|▎ | 1/30 [00:00<00:00, 975.42 it/sec, obj=-13]
INFO - 16:26:10:
WARNING - 16:26:10: Optimization found no feasible point ! The least infeasible point is selected.
INFO - 16:26:10:
INFO - 16:26:10: Optimization result:
INFO - 16:26:10: Optimizer info:
INFO - 16:26:10: Status: 8
INFO - 16:26:10: Message: Positive directional derivative for linesearch
INFO - 16:26:10: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:10: Solution:
WARNING - 16:26:10: The solution is not feasible.
INFO - 16:26:10: Objective: -13.032585586024217
INFO - 16:26:10: Standardized constraints:
INFO - 16:26:10: g_2 = 0.006789165930262353
INFO - 16:26:10: Design space:
INFO - 16:26:10: +------+-------------+-------+-------------+-------+
INFO - 16:26:10: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:10: +------+-------------+-------+-------------+-------+
INFO - 16:26:10: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:10: +------+-------------+-------+-------------+-------+
INFO - 16:26:10: *** End AerodynamicsScenario execution (time: 0:00:00.020452) ***
INFO - 16:26:10:
INFO - 16:26:10: *** Start StructureScenario execution ***
INFO - 16:26:10: StructureScenario
INFO - 16:26:10: Disciplines: SobieskiStructure
INFO - 16:26:10: MDO formulation: DisciplinaryOpt
INFO - 16:26:10: Optimization problem:
INFO - 16:26:10: minimize -y_11(x_1)
INFO - 16:26:10: with respect to x_1
INFO - 16:26:10: subject to constraints:
INFO - 16:26:10: g_1(x_1) <= 0.0
INFO - 16:26:10: over the design space:
INFO - 16:26:10: +--------+-------------+-------------------+-------------+-------+
INFO - 16:26:10: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:10: +--------+-------------+-------------------+-------------+-------+
INFO - 16:26:10: | x_1[0] | 0.1 | 0.1 | 0.4 | float |
INFO - 16:26:10: | x_1[1] | 0.75 | 1.045173780953992 | 1.25 | float |
INFO - 16:26:10: +--------+-------------+-------------------+-------------+-------+
INFO - 16:26:10: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:10: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:10:
INFO - 16:26:10: ... 3%|▎ | 1/30 [00:00<00:00, 584.98 it/sec, obj=-.199]
INFO - 16:26:10:
INFO - 16:26:10: ... 7%|▋ | 2/30 [00:00<00:00, 252.62 it/sec, obj=-.265]
INFO - 16:26:10:
INFO - 16:26:10: ... 10%|█ | 3/30 [00:00<00:00, 224.61 it/sec, obj=-.596]
INFO - 16:26:10:
INFO - 16:26:10: ... 13%|█▎ | 4/30 [00:00<00:00, 210.69 it/sec, obj=-.596]
INFO - 16:26:10:
INFO - 16:26:10: ... 17%|█▋ | 5/30 [00:00<00:00, 203.54 it/sec, obj=-.596]
INFO - 16:26:10:
INFO - 16:26:10: ... 20%|██ | 6/30 [00:00<00:00, 199.44 it/sec, obj=-.599]
INFO - 16:26:10:
INFO - 16:26:10: ... 23%|██▎ | 7/30 [00:00<00:00, 196.42 it/sec, obj=-.604]
INFO - 16:26:10:
INFO - 16:26:10: ... 27%|██▋ | 8/30 [00:00<00:00, 194.22 it/sec, obj=-.605]
INFO - 16:26:10:
INFO - 16:26:10: ... 30%|███ | 9/30 [00:00<00:00, 191.15 it/sec, obj=-.605]
INFO - 16:26:10:
INFO - 16:26:10: ... 33%|███▎ | 10/30 [00:00<00:00, 189.90 it/sec, obj=-.605]
INFO - 16:26:10:
INFO - 16:26:10: ... 37%|███▋ | 11/30 [00:00<00:00, 188.98 it/sec, obj=-.605]
INFO - 16:26:10:
INFO - 16:26:10:
INFO - 16:26:10: Optimization result:
INFO - 16:26:10: Optimizer info:
INFO - 16:26:10: Status: None
INFO - 16:26:10: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:26:10: Number of calls to the objective function by the optimizer: 12
INFO - 16:26:10: Solution:
INFO - 16:26:10: The solution is feasible.
INFO - 16:26:10: Objective: -0.6049250967740284
INFO - 16:26:10: Standardized constraints:
INFO - 16:26:10: g_1 = [ 2.18820928e-08 -7.11385911e-03 -1.92530970e-02 -2.92829748e-02
INFO - 16:26:10: -3.71138664e-02 -2.24260819e-01 -1.57391811e-02]
INFO - 16:26:10: Design space:
INFO - 16:26:10: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:10: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:10: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:10: | x_1[0] | 0.1 | 0.3956700596288923 | 0.4 | float |
INFO - 16:26:10: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:10: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:10: *** End StructureScenario execution (time: 0:00:00.070241) ***
INFO - 16:26:10: ... 20%|██ | 10/50 [00:02<00:10, 3.69 it/sec, obj=-2.59e+3]
INFO - 16:26:10:
INFO - 16:26:10: *** Start PropulsionScenario execution ***
INFO - 16:26:10: PropulsionScenario
INFO - 16:26:10: Disciplines: SobieskiPropulsion
INFO - 16:26:10: MDO formulation: DisciplinaryOpt
INFO - 16:26:10: Optimization problem:
INFO - 16:26:10: minimize y_34(x_3)
INFO - 16:26:10: with respect to x_3
INFO - 16:26:10: subject to constraints:
INFO - 16:26:10: g_3(x_3) <= 0.0
INFO - 16:26:10: over the design space:
INFO - 16:26:10: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:10: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:10: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:10: | x_3 | 0.1 | 0.1765337509472551 | 1 | float |
INFO - 16:26:10: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:10: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:10: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:10:
INFO - 16:26:10: ... 3%|▎ | 1/30 [00:00<00:00, 1790.91 it/sec, obj=0.938]
INFO - 16:26:10:
INFO - 16:26:10: ... 7%|▋ | 2/30 [00:00<00:00, 445.28 it/sec, obj=0.945]
INFO - 16:26:10:
INFO - 16:26:10: ... 10%|█ | 3/30 [00:00<00:00, 498.00 it/sec, obj=0.939]
INFO - 16:26:10:
INFO - 16:26:10: ... 13%|█▎ | 4/30 [00:00<00:00, 427.12 it/sec, obj=0.945]
INFO - 16:26:10:
INFO - 16:26:10: ... 17%|█▋ | 5/30 [00:00<00:00, 397.75 it/sec, obj=0.945]
INFO - 16:26:10:
INFO - 16:26:10: ... 20%|██ | 6/30 [00:00<00:00, 378.42 it/sec, obj=0.945]
INFO - 16:26:10:
INFO - 16:26:10:
INFO - 16:26:10: Optimization result:
INFO - 16:26:10: Optimizer info:
INFO - 16:26:10: Status: None
INFO - 16:26:10: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:26:10: Number of calls to the objective function by the optimizer: 7
INFO - 16:26:10: Solution:
INFO - 16:26:10: The solution is feasible.
INFO - 16:26:10: Objective: 0.9449429668739536
INFO - 16:26:10: Standardized constraints:
INFO - 16:26:10: g_3 = [-7.57141852e-01 -2.42858148e-01 1.11022302e-15 -1.79769275e-01]
INFO - 16:26:10: Design space:
INFO - 16:26:10: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:10: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:10: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:10: | x_3 | 0.1 | 0.1600060999443509 | 1 | float |
INFO - 16:26:10: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:10: *** End PropulsionScenario execution (time: 0:00:00.027703) ***
INFO - 16:26:10:
INFO - 16:26:10: *** Start AerodynamicsScenario execution ***
INFO - 16:26:10: AerodynamicsScenario
INFO - 16:26:10: Disciplines: SobieskiAerodynamics
INFO - 16:26:10: MDO formulation: DisciplinaryOpt
INFO - 16:26:10: Optimization problem:
INFO - 16:26:10: minimize -y_24(x_2)
INFO - 16:26:10: with respect to x_2
INFO - 16:26:10: subject to constraints:
INFO - 16:26:10: g_2(x_2) <= 0.0
INFO - 16:26:10: over the design space:
INFO - 16:26:10: +------+-------------+-------+-------------+-------+
INFO - 16:26:10: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:10: +------+-------------+-------+-------------+-------+
INFO - 16:26:10: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:10: +------+-------------+-------+-------------+-------+
INFO - 16:26:10: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:10: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:10:
INFO - 16:26:10: ... 3%|▎ | 1/30 [00:00<00:00, 991.56 it/sec, obj=-6.66]
INFO - 16:26:10:
INFO - 16:26:10:
INFO - 16:26:10: Optimization result:
INFO - 16:26:10: Optimizer info:
INFO - 16:26:10: Status: 8
INFO - 16:26:10: Message: Positive directional derivative for linesearch
INFO - 16:26:10: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:10: Solution:
INFO - 16:26:10: The solution is feasible.
INFO - 16:26:10: Objective: -6.65566291884671
INFO - 16:26:10: Standardized constraints:
INFO - 16:26:10: g_2 = -5.838916921274695e-05
INFO - 16:26:10: Design space:
INFO - 16:26:10: +------+-------------+-------+-------------+-------+
INFO - 16:26:10: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:10: +------+-------------+-------+-------------+-------+
INFO - 16:26:10: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:10: +------+-------------+-------+-------------+-------+
INFO - 16:26:10: *** End AerodynamicsScenario execution (time: 0:00:00.015355) ***
INFO - 16:26:10:
INFO - 16:26:10: *** Start StructureScenario execution ***
INFO - 16:26:10: StructureScenario
INFO - 16:26:10: Disciplines: SobieskiStructure
INFO - 16:26:10: MDO formulation: DisciplinaryOpt
INFO - 16:26:10: Optimization problem:
INFO - 16:26:10: minimize -y_11(x_1)
INFO - 16:26:10: with respect to x_1
INFO - 16:26:10: subject to constraints:
INFO - 16:26:10: g_1(x_1) <= 0.0
INFO - 16:26:10: over the design space:
INFO - 16:26:10: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:10: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:10: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:10: | x_1[0] | 0.1 | 0.3956700596288923 | 0.4 | float |
INFO - 16:26:10: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:10: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:10: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:10: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:10:
INFO - 16:26:10: ... 3%|▎ | 1/30 [00:00<00:00, 583.60 it/sec, obj=-.499]
INFO - 16:26:10:
INFO - 16:26:10: ... 7%|▋ | 2/30 [00:00<00:00, 257.64 it/sec, obj=-.408]
INFO - 16:26:10:
INFO - 16:26:10: ... 10%|█ | 3/30 [00:00<00:00, 230.05 it/sec, obj=-.42]
INFO - 16:26:10:
INFO - 16:26:10: ... 13%|█▎ | 4/30 [00:00<00:00, 213.56 it/sec, obj=-.437]
INFO - 16:26:10:
INFO - 16:26:10: ... 17%|█▋ | 5/30 [00:00<00:00, 205.73 it/sec, obj=-.496]
INFO - 16:26:10:
INFO - 16:26:10: ... 20%|██ | 6/30 [00:00<00:00, 200.83 it/sec, obj=-.496]
INFO - 16:26:10:
INFO - 16:26:10: ... 23%|██▎ | 7/30 [00:00<00:00, 197.47 it/sec, obj=-.496]
INFO - 16:26:10:
INFO - 16:26:10: ... 27%|██▋ | 8/30 [00:00<00:00, 194.95 it/sec, obj=-.496]
INFO - 16:26:10:
INFO - 16:26:10: ... 30%|███ | 9/30 [00:00<00:00, 193.09 it/sec, obj=-.496]
INFO - 16:26:10:
INFO - 16:26:10: ... 33%|███▎ | 10/30 [00:00<00:00, 191.54 it/sec, obj=-.496]
INFO - 16:26:10:
INFO - 16:26:10:
INFO - 16:26:10: Optimization result:
INFO - 16:26:10: Optimizer info:
INFO - 16:26:10: Status: None
INFO - 16:26:10: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:26:10: Number of calls to the objective function by the optimizer: 11
INFO - 16:26:10: Solution:
INFO - 16:26:10: The solution is feasible.
INFO - 16:26:10: Objective: -0.49617938304732806
INFO - 16:26:10: Standardized constraints:
INFO - 16:26:10: g_1 = [ 3.83093557e-12 -1.01681988e-02 -2.26892237e-02 -3.25816547e-02
INFO - 16:26:10: -4.01681988e-02 -1.89656066e-01 -5.03439336e-02]
INFO - 16:26:10: Design space:
INFO - 16:26:10: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:10: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:10: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:10: | x_1[0] | 0.1 | 0.1919195677564518 | 0.4 | float |
INFO - 16:26:10: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:10: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:10: *** End StructureScenario execution (time: 0:00:00.064128) ***
INFO - 16:26:11: ... 22%|██▏ | 11/50 [00:02<00:10, 3.74 it/sec, obj=-2.94e+3]
WARNING - 16:26:11: MDAJacobi has reached its maximum number of iterations but the normed residual 2.4549723055100612e-14 is still above the tolerance 1e-14.
INFO - 16:26:11:
INFO - 16:26:11: *** Start PropulsionScenario execution ***
INFO - 16:26:11: PropulsionScenario
INFO - 16:26:11: Disciplines: SobieskiPropulsion
INFO - 16:26:11: MDO formulation: DisciplinaryOpt
INFO - 16:26:11: Optimization problem:
INFO - 16:26:11: minimize y_34(x_3)
INFO - 16:26:11: with respect to x_3
INFO - 16:26:11: subject to constraints:
INFO - 16:26:11: g_3(x_3) <= 0.0
INFO - 16:26:11: over the design space:
INFO - 16:26:11: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:11: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:11: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:11: | x_3 | 0.1 | 0.1600060999443509 | 1 | float |
INFO - 16:26:11: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:11: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:11: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:11:
INFO - 16:26:11: ... 3%|▎ | 1/30 [00:00<00:00, 1797.05 it/sec, obj=0.936]
INFO - 16:26:11:
INFO - 16:26:11: ... 7%|▋ | 2/30 [00:00<00:00, 459.17 it/sec, obj=0.937]
INFO - 16:26:11:
INFO - 16:26:11: ... 10%|█ | 3/30 [00:00<00:00, 487.52 it/sec, obj=0.937]
INFO - 16:26:11:
INFO - 16:26:11: ... 13%|█▎ | 4/30 [00:00<00:00, 409.17 it/sec, obj=0.937]
INFO - 16:26:11:
INFO - 16:26:11: ... 17%|█▋ | 5/30 [00:00<00:00, 383.76 it/sec, obj=0.937]
INFO - 16:26:11:
INFO - 16:26:11: ... 20%|██ | 6/30 [00:00<00:00, 365.72 it/sec, obj=0.937]
INFO - 16:26:11:
INFO - 16:26:11:
INFO - 16:26:11: Optimization result:
INFO - 16:26:11: Optimizer info:
INFO - 16:26:11: Status: None
INFO - 16:26:11: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:26:11: Number of calls to the objective function by the optimizer: 7
INFO - 16:26:11: Solution:
INFO - 16:26:11: The solution is feasible.
INFO - 16:26:11: Objective: 0.9370546762479626
INFO - 16:26:11: Standardized constraints:
INFO - 16:26:11: g_3 = [-6.66658445e-01 -3.33341555e-01 -2.22044605e-16 -1.81107058e-01]
INFO - 16:26:11: Design space:
INFO - 16:26:11: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:11: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:11: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:11: | x_3 | 0.1 | 0.1585439126140074 | 1 | float |
INFO - 16:26:11: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:11: *** End PropulsionScenario execution (time: 0:00:00.028305) ***
INFO - 16:26:11:
INFO - 16:26:11: *** Start AerodynamicsScenario execution ***
INFO - 16:26:11: AerodynamicsScenario
INFO - 16:26:11: Disciplines: SobieskiAerodynamics
INFO - 16:26:11: MDO formulation: DisciplinaryOpt
INFO - 16:26:11: Optimization problem:
INFO - 16:26:11: minimize -y_24(x_2)
INFO - 16:26:11: with respect to x_2
INFO - 16:26:11: subject to constraints:
INFO - 16:26:11: g_2(x_2) <= 0.0
INFO - 16:26:11: over the design space:
INFO - 16:26:11: +------+-------------+-------+-------------+-------+
INFO - 16:26:11: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:11: +------+-------------+-------+-------------+-------+
INFO - 16:26:11: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:11: +------+-------------+-------+-------------+-------+
INFO - 16:26:11: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:11: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:11:
INFO - 16:26:11: ... 3%|▎ | 1/30 [00:00<00:00, 965.76 it/sec, obj=-6.19]
INFO - 16:26:11:
WARNING - 16:26:11: Optimization found no feasible point ! The least infeasible point is selected.
INFO - 16:26:11:
INFO - 16:26:11: Optimization result:
INFO - 16:26:11: Optimizer info:
INFO - 16:26:11: Status: 8
INFO - 16:26:11: Message: Positive directional derivative for linesearch
INFO - 16:26:11: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:11: Solution:
WARNING - 16:26:11: The solution is not feasible.
INFO - 16:26:11: Objective: -6.189440039501086
INFO - 16:26:11: Standardized constraints:
INFO - 16:26:11: g_2 = 0.010000000000000009
INFO - 16:26:11: Design space:
INFO - 16:26:11: +------+-------------+-------+-------------+-------+
INFO - 16:26:11: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:11: +------+-------------+-------+-------------+-------+
INFO - 16:26:11: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:11: +------+-------------+-------+-------------+-------+
INFO - 16:26:11: *** End AerodynamicsScenario execution (time: 0:00:00.014800) ***
INFO - 16:26:11:
INFO - 16:26:11: *** Start StructureScenario execution ***
INFO - 16:26:11: StructureScenario
INFO - 16:26:11: Disciplines: SobieskiStructure
INFO - 16:26:11: MDO formulation: DisciplinaryOpt
INFO - 16:26:11: Optimization problem:
INFO - 16:26:11: minimize -y_11(x_1)
INFO - 16:26:11: with respect to x_1
INFO - 16:26:11: subject to constraints:
INFO - 16:26:11: g_1(x_1) <= 0.0
INFO - 16:26:11: over the design space:
INFO - 16:26:11: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:11: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:11: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:11: | x_1[0] | 0.1 | 0.1919195677564518 | 0.4 | float |
INFO - 16:26:11: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:11: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:11: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:11: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:11:
INFO - 16:26:11: ... 3%|▎ | 1/30 [00:00<00:00, 584.08 it/sec, obj=-.445]
INFO - 16:26:11:
INFO - 16:26:11: ... 7%|▋ | 2/30 [00:00<00:00, 257.58 it/sec, obj=-.444]
INFO - 16:26:11:
INFO - 16:26:11: ... 10%|█ | 3/30 [00:00<00:00, 234.00 it/sec, obj=-.444]
INFO - 16:26:11:
INFO - 16:26:11: ... 13%|█▎ | 4/30 [00:00<00:00, 216.43 it/sec, obj=-.444]
INFO - 16:26:11:
INFO - 16:26:11: ... 17%|█▋ | 5/30 [00:00<00:00, 207.57 it/sec, obj=-.444]
INFO - 16:26:11:
INFO - 16:26:11:
INFO - 16:26:11: Optimization result:
INFO - 16:26:11: Optimizer info:
INFO - 16:26:11: Status: None
INFO - 16:26:11: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:26:11: Number of calls to the objective function by the optimizer: 6
INFO - 16:26:11: Solution:
INFO - 16:26:11: The solution is feasible.
INFO - 16:26:11: Objective: -0.4438737208471965
INFO - 16:26:11: Standardized constraints:
INFO - 16:26:11: g_1 = [-5.64465659e-02 -3.16685293e-02 -3.27654540e-02 -3.77391106e-02
INFO - 16:26:11: -4.28530073e-02 -2.40000000e-01 -6.63413768e-12]
INFO - 16:26:11: Design space:
INFO - 16:26:11: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:11: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:11: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:11: | x_1[0] | 0.1 | 0.1188877757376786 | 0.4 | float |
INFO - 16:26:11: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:11: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:11: *** End StructureScenario execution (time: 0:00:00.035851) ***
INFO - 16:26:11: ... 24%|██▍ | 12/50 [00:03<00:10, 3.68 it/sec, obj=-2.39e+3]
INFO - 16:26:11:
INFO - 16:26:11: *** Start PropulsionScenario execution ***
INFO - 16:26:11: PropulsionScenario
INFO - 16:26:11: Disciplines: SobieskiPropulsion
INFO - 16:26:11: MDO formulation: DisciplinaryOpt
INFO - 16:26:11: Optimization problem:
INFO - 16:26:11: minimize y_34(x_3)
INFO - 16:26:11: with respect to x_3
INFO - 16:26:11: subject to constraints:
INFO - 16:26:11: g_3(x_3) <= 0.0
INFO - 16:26:11: over the design space:
INFO - 16:26:11: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:11: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:11: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:11: | x_3 | 0.1 | 0.1585439126140074 | 1 | float |
INFO - 16:26:11: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:11: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:11: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:11:
INFO - 16:26:11: ... 3%|▎ | 1/30 [00:00<00:00, 1712.66 it/sec, obj=0.964]
INFO - 16:26:11:
INFO - 16:26:11: ... 7%|▋ | 2/30 [00:00<00:00, 437.50 it/sec, obj=0.96]
INFO - 16:26:11:
INFO - 16:26:11: ... 10%|█ | 3/30 [00:00<00:00, 410.01 it/sec, obj=0.96]
INFO - 16:26:11:
INFO - 16:26:11: ... 13%|█▎ | 4/30 [00:00<00:00, 428.56 it/sec, obj=0.96]
INFO - 16:26:11:
INFO - 16:26:11:
INFO - 16:26:11: Optimization result:
INFO - 16:26:11: Optimizer info:
INFO - 16:26:11: Status: None
INFO - 16:26:11: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:26:11: Number of calls to the objective function by the optimizer: 5
INFO - 16:26:11: Solution:
INFO - 16:26:11: The solution is feasible.
INFO - 16:26:11: Objective: 0.9603974676787147
INFO - 16:26:11: Standardized constraints:
INFO - 16:26:11: g_3 = [-7.26739533e-01 -2.73260467e-01 4.44089210e-16 -1.79874840e-01]
INFO - 16:26:11: Design space:
INFO - 16:26:11: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:11: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:11: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:11: | x_3 | 0.1 | 0.1659098581266167 | 1 | float |
INFO - 16:26:11: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:11: *** End PropulsionScenario execution (time: 0:00:00.021477) ***
INFO - 16:26:11:
INFO - 16:26:11: *** Start AerodynamicsScenario execution ***
INFO - 16:26:11: AerodynamicsScenario
INFO - 16:26:11: Disciplines: SobieskiAerodynamics
INFO - 16:26:11: MDO formulation: DisciplinaryOpt
INFO - 16:26:11: Optimization problem:
INFO - 16:26:11: minimize -y_24(x_2)
INFO - 16:26:11: with respect to x_2
INFO - 16:26:11: subject to constraints:
INFO - 16:26:11: g_2(x_2) <= 0.0
INFO - 16:26:11: over the design space:
INFO - 16:26:11: +------+-------------+-------+-------------+-------+
INFO - 16:26:11: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:11: +------+-------------+-------+-------------+-------+
INFO - 16:26:11: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:11: +------+-------------+-------+-------------+-------+
INFO - 16:26:11: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:11: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:11:
INFO - 16:26:11: ... 3%|▎ | 1/30 [00:00<00:00, 948.08 it/sec, obj=-6.65]
INFO - 16:26:11:
INFO - 16:26:11:
INFO - 16:26:11: Optimization result:
INFO - 16:26:11: Optimizer info:
INFO - 16:26:11: Status: 8
INFO - 16:26:11: Message: Positive directional derivative for linesearch
INFO - 16:26:11: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:11: Solution:
INFO - 16:26:11: The solution is feasible.
INFO - 16:26:11: Objective: -6.649273847157116
INFO - 16:26:11: Standardized constraints:
INFO - 16:26:11: g_2 = -0.005867215623437172
INFO - 16:26:11: Design space:
INFO - 16:26:11: +------+-------------+-------+-------------+-------+
INFO - 16:26:11: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:11: +------+-------------+-------+-------------+-------+
INFO - 16:26:11: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:11: +------+-------------+-------+-------------+-------+
INFO - 16:26:11: *** End AerodynamicsScenario execution (time: 0:00:00.014903) ***
INFO - 16:26:11:
INFO - 16:26:11: *** Start StructureScenario execution ***
INFO - 16:26:11: StructureScenario
INFO - 16:26:11: Disciplines: SobieskiStructure
INFO - 16:26:11: MDO formulation: DisciplinaryOpt
INFO - 16:26:11: Optimization problem:
INFO - 16:26:11: minimize -y_11(x_1)
INFO - 16:26:11: with respect to x_1
INFO - 16:26:11: subject to constraints:
INFO - 16:26:11: g_1(x_1) <= 0.0
INFO - 16:26:11: over the design space:
INFO - 16:26:11: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:11: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:11: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:11: | x_1[0] | 0.1 | 0.1188877757376786 | 0.4 | float |
INFO - 16:26:11: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:11: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:11: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:11: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:11:
INFO - 16:26:11: ... 3%|▎ | 1/30 [00:00<00:00, 558.79 it/sec, obj=-.476]
INFO - 16:26:11:
INFO - 16:26:11: ... 7%|▋ | 2/30 [00:00<00:00, 233.68 it/sec, obj=-.476]
INFO - 16:26:11:
INFO - 16:26:11: ... 10%|█ | 3/30 [00:00<00:00, 219.66 it/sec, obj=-.476]
INFO - 16:26:11:
INFO - 16:26:11: ... 13%|█▎ | 4/30 [00:00<00:00, 207.02 it/sec, obj=-.476]
INFO - 16:26:11:
INFO - 16:26:11:
INFO - 16:26:11: Optimization result:
INFO - 16:26:11: Optimizer info:
INFO - 16:26:11: Status: None
INFO - 16:26:11: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:26:11: Number of calls to the objective function by the optimizer: 5
INFO - 16:26:11: Solution:
INFO - 16:26:11: The solution is feasible.
INFO - 16:26:11: Objective: -0.4761334269920351
INFO - 16:26:11: Standardized constraints:
INFO - 16:26:11: g_1 = [-1.99840144e-14 -1.40526874e-02 -2.70592734e-02 -3.67769024e-02
INFO - 16:26:11: -4.40526874e-02 -1.57218816e-01 -8.27811842e-02]
INFO - 16:26:11: Design space:
INFO - 16:26:11: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:11: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:11: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:11: | x_1[0] | 0.1 | 0.1183356752123934 | 0.4 | float |
INFO - 16:26:11: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:11: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:11: *** End StructureScenario execution (time: 0:00:00.031893) ***
INFO - 16:26:11: ... 26%|██▌ | 13/50 [00:03<00:10, 3.61 it/sec, obj=-2.66e+3]
WARNING - 16:26:11: MDAJacobi has reached its maximum number of iterations but the normed residual 2.4549723055100612e-14 is still above the tolerance 1e-14.
INFO - 16:26:11:
INFO - 16:26:11: *** Start PropulsionScenario execution ***
INFO - 16:26:11: PropulsionScenario
INFO - 16:26:11: Disciplines: SobieskiPropulsion
INFO - 16:26:11: MDO formulation: DisciplinaryOpt
INFO - 16:26:11: Optimization problem:
INFO - 16:26:11: minimize y_34(x_3)
INFO - 16:26:11: with respect to x_3
INFO - 16:26:11: subject to constraints:
INFO - 16:26:11: g_3(x_3) <= 0.0
INFO - 16:26:11: over the design space:
INFO - 16:26:11: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:11: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:11: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:11: | x_3 | 0.1 | 0.1659098581266167 | 1 | float |
INFO - 16:26:11: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:11: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:11: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:11:
INFO - 16:26:11: ... 3%|▎ | 1/30 [00:00<00:00, 1802.45 it/sec, obj=0.973]
INFO - 16:26:11:
INFO - 16:26:11: ... 7%|▋ | 2/30 [00:00<00:00, 459.75 it/sec, obj=0.971]
INFO - 16:26:11:
INFO - 16:26:11: ... 10%|█ | 3/30 [00:00<00:00, 423.18 it/sec, obj=0.971]
INFO - 16:26:11:
INFO - 16:26:11:
INFO - 16:26:11: Optimization result:
INFO - 16:26:11: Optimizer info:
INFO - 16:26:11: Status: 8
INFO - 16:26:11: Message: Positive directional derivative for linesearch
INFO - 16:26:11: Number of calls to the objective function by the optimizer: 16
INFO - 16:26:11: Solution:
INFO - 16:26:11: The solution is feasible.
INFO - 16:26:11: Objective: 0.9711461728534313
INFO - 16:26:11: Standardized constraints:
INFO - 16:26:11: g_3 = [-7.58632364e-01 -2.41367636e-01 8.88178420e-16 -1.79639423e-01]
INFO - 16:26:11: Design space:
INFO - 16:26:11: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:11: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:11: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:11: | x_3 | 0.1 | 0.1702740858955722 | 1 | float |
INFO - 16:26:11: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:11: *** End PropulsionScenario execution (time: 0:00:00.028362) ***
INFO - 16:26:11:
INFO - 16:26:11: *** Start AerodynamicsScenario execution ***
INFO - 16:26:11: AerodynamicsScenario
INFO - 16:26:11: Disciplines: SobieskiAerodynamics
INFO - 16:26:11: MDO formulation: DisciplinaryOpt
INFO - 16:26:11: Optimization problem:
INFO - 16:26:11: minimize -y_24(x_2)
INFO - 16:26:11: with respect to x_2
INFO - 16:26:11: subject to constraints:
INFO - 16:26:11: g_2(x_2) <= 0.0
INFO - 16:26:11: over the design space:
INFO - 16:26:11: +------+-------------+-------+-------------+-------+
INFO - 16:26:11: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:11: +------+-------------+-------+-------------+-------+
INFO - 16:26:11: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:11: +------+-------------+-------+-------------+-------+
INFO - 16:26:11: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:11: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:11:
INFO - 16:26:11: ... 3%|▎ | 1/30 [00:00<00:00, 977.92 it/sec, obj=-6.54]
INFO - 16:26:11:
INFO - 16:26:11:
INFO - 16:26:11: Optimization result:
INFO - 16:26:11: Optimizer info:
INFO - 16:26:11: Status: 8
INFO - 16:26:11: Message: Positive directional derivative for linesearch
INFO - 16:26:11: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:11: Solution:
INFO - 16:26:11: The solution is feasible.
INFO - 16:26:11: Objective: -6.54138910369114
INFO - 16:26:11: Standardized constraints:
INFO - 16:26:11: g_2 = -0.00782710980650081
INFO - 16:26:11: Design space:
INFO - 16:26:11: +------+-------------+-------+-------------+-------+
INFO - 16:26:11: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:11: +------+-------------+-------+-------------+-------+
INFO - 16:26:11: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:11: +------+-------------+-------+-------------+-------+
INFO - 16:26:11: *** End AerodynamicsScenario execution (time: 0:00:00.014404) ***
INFO - 16:26:11:
INFO - 16:26:11: *** Start StructureScenario execution ***
INFO - 16:26:11: StructureScenario
INFO - 16:26:11: Disciplines: SobieskiStructure
INFO - 16:26:11: MDO formulation: DisciplinaryOpt
INFO - 16:26:11: Optimization problem:
INFO - 16:26:11: minimize -y_11(x_1)
INFO - 16:26:11: with respect to x_1
INFO - 16:26:11: subject to constraints:
INFO - 16:26:11: g_1(x_1) <= 0.0
INFO - 16:26:11: over the design space:
INFO - 16:26:11: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:11: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:11: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:11: | x_1[0] | 0.1 | 0.1183356752123934 | 0.4 | float |
INFO - 16:26:11: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:11: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:11: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:11: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:11:
INFO - 16:26:11: ... 3%|▎ | 1/30 [00:00<00:00, 588.59 it/sec, obj=-.464]
INFO - 16:26:11:
INFO - 16:26:11: ... 7%|▋ | 2/30 [00:00<00:00, 255.71 it/sec, obj=-.464]
INFO - 16:26:11:
INFO - 16:26:11: ... 10%|█ | 3/30 [00:00<00:00, 232.90 it/sec, obj=-.464]
INFO - 16:26:11:
INFO - 16:26:11: ... 13%|█▎ | 4/30 [00:00<00:00, 216.07 it/sec, obj=-.464]
INFO - 16:26:11:
INFO - 16:26:11: ... 17%|█▋ | 5/30 [00:00<00:00, 207.60 it/sec, obj=-.464]
INFO - 16:26:11:
INFO - 16:26:11:
INFO - 16:26:11: Optimization result:
INFO - 16:26:11: Optimizer info:
INFO - 16:26:11: Status: None
INFO - 16:26:11: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:26:11: Number of calls to the objective function by the optimizer: 6
INFO - 16:26:11: Solution:
INFO - 16:26:11: The solution is feasible.
INFO - 16:26:11: Objective: -0.46413096353021727
INFO - 16:26:11: Standardized constraints:
INFO - 16:26:11: g_1 = [-2.66453526e-15 -1.49546716e-02 -2.80740056e-02 -3.77510454e-02
INFO - 16:26:11: -4.49546716e-02 -1.48161906e-01 -9.18380936e-02]
INFO - 16:26:11: Design space:
INFO - 16:26:11: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:11: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:11: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:11: | x_1[0] | 0.1 | 0.1000633672746141 | 0.4 | float |
INFO - 16:26:11: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:11: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:11: *** End StructureScenario execution (time: 0:00:00.036001) ***
INFO - 16:26:11: ... 28%|██▊ | 14/50 [00:03<00:10, 3.60 it/sec, obj=-2.54e+3]
INFO - 16:26:12:
INFO - 16:26:12: *** Start PropulsionScenario execution ***
INFO - 16:26:12: PropulsionScenario
INFO - 16:26:12: Disciplines: SobieskiPropulsion
INFO - 16:26:12: MDO formulation: DisciplinaryOpt
INFO - 16:26:12: Optimization problem:
INFO - 16:26:12: minimize y_34(x_3)
INFO - 16:26:12: with respect to x_3
INFO - 16:26:12: subject to constraints:
INFO - 16:26:12: g_3(x_3) <= 0.0
INFO - 16:26:12: over the design space:
INFO - 16:26:12: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:12: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:12: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:12: | x_3 | 0.1 | 0.1702740858955722 | 1 | float |
INFO - 16:26:12: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:12: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:12: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:12:
INFO - 16:26:12: ... 3%|▎ | 1/30 [00:00<00:00, 1061.58 it/sec, obj=0.961]
INFO - 16:26:12:
INFO - 16:26:12: ... 7%|▋ | 2/30 [00:00<00:00, 421.96 it/sec, obj=0.964]
INFO - 16:26:12:
INFO - 16:26:12: ... 10%|█ | 3/30 [00:00<00:00, 483.85 it/sec, obj=0.961]
INFO - 16:26:12:
INFO - 16:26:12: ... 13%|█▎ | 4/30 [00:00<00:00, 420.56 it/sec, obj=0.964]
INFO - 16:26:12:
INFO - 16:26:12:
INFO - 16:26:12: Optimization result:
INFO - 16:26:12: Optimizer info:
INFO - 16:26:12: Status: 8
INFO - 16:26:12: Message: Positive directional derivative for linesearch
INFO - 16:26:12: Number of calls to the objective function by the optimizer: 5
INFO - 16:26:12: Solution:
INFO - 16:26:12: The solution is feasible.
INFO - 16:26:12: Objective: 0.963933399861949
INFO - 16:26:12: Standardized constraints:
INFO - 16:26:12: g_3 = [-0.69021057 -0.30978943 0. -0.17639239]
INFO - 16:26:12: Design space:
INFO - 16:26:12: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:12: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:12: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:12: | x_3 | 0.1 | 0.1637941876933404 | 1 | float |
INFO - 16:26:12: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:12: *** End PropulsionScenario execution (time: 0:00:00.023302) ***
INFO - 16:26:12:
INFO - 16:26:12: *** Start AerodynamicsScenario execution ***
INFO - 16:26:12: AerodynamicsScenario
INFO - 16:26:12: Disciplines: SobieskiAerodynamics
INFO - 16:26:12: MDO formulation: DisciplinaryOpt
INFO - 16:26:12: Optimization problem:
INFO - 16:26:12: minimize -y_24(x_2)
INFO - 16:26:12: with respect to x_2
INFO - 16:26:12: subject to constraints:
INFO - 16:26:12: g_2(x_2) <= 0.0
INFO - 16:26:12: over the design space:
INFO - 16:26:12: +------+-------------+-------+-------------+-------+
INFO - 16:26:12: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:12: +------+-------------+-------+-------------+-------+
INFO - 16:26:12: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:12: +------+-------------+-------+-------------+-------+
INFO - 16:26:12: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:12: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:12:
INFO - 16:26:12: ... 3%|▎ | 1/30 [00:00<00:00, 980.89 it/sec, obj=-6.26]
INFO - 16:26:12:
WARNING - 16:26:12: Optimization found no feasible point ! The least infeasible point is selected.
INFO - 16:26:12:
INFO - 16:26:12: Optimization result:
INFO - 16:26:12: Optimizer info:
INFO - 16:26:12: Status: 8
INFO - 16:26:12: Message: Positive directional derivative for linesearch
INFO - 16:26:12: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:12: Solution:
WARNING - 16:26:12: The solution is not feasible.
INFO - 16:26:12: Objective: -6.258231561167342
INFO - 16:26:12: Standardized constraints:
INFO - 16:26:12: g_2 = 0.008540984878289581
INFO - 16:26:12: Design space:
INFO - 16:26:12: +------+-------------+-------+-------------+-------+
INFO - 16:26:12: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:12: +------+-------------+-------+-------------+-------+
INFO - 16:26:12: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:12: +------+-------------+-------+-------------+-------+
INFO - 16:26:12: *** End AerodynamicsScenario execution (time: 0:00:00.020108) ***
INFO - 16:26:12:
INFO - 16:26:12: *** Start StructureScenario execution ***
INFO - 16:26:12: StructureScenario
INFO - 16:26:12: Disciplines: SobieskiStructure
INFO - 16:26:12: MDO formulation: DisciplinaryOpt
INFO - 16:26:12: Optimization problem:
INFO - 16:26:12: minimize -y_11(x_1)
INFO - 16:26:12: with respect to x_1
INFO - 16:26:12: subject to constraints:
INFO - 16:26:12: g_1(x_1) <= 0.0
INFO - 16:26:12: over the design space:
INFO - 16:26:12: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:12: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:12: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:12: | x_1[0] | 0.1 | 0.1000633672746141 | 0.4 | float |
INFO - 16:26:12: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:12: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:12: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:12: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:12:
INFO - 16:26:12: ... 3%|▎ | 1/30 [00:00<00:00, 585.06 it/sec, obj=-.471]
INFO - 16:26:12:
INFO - 16:26:12: ... 7%|▋ | 2/30 [00:00<00:00, 254.11 it/sec, obj=-.471]
INFO - 16:26:12:
INFO - 16:26:12: ... 10%|█ | 3/30 [00:00<00:00, 230.87 it/sec, obj=-.472]
INFO - 16:26:12:
INFO - 16:26:12: ... 13%|█▎ | 4/30 [00:00<00:00, 215.03 it/sec, obj=-.472]
INFO - 16:26:12:
INFO - 16:26:12: ... 17%|█▋ | 5/30 [00:00<00:00, 206.49 it/sec, obj=-.474]
INFO - 16:26:12:
INFO - 16:26:12: ... 20%|██ | 6/30 [00:00<00:00, 201.37 it/sec, obj=-.474]
INFO - 16:26:12:
INFO - 16:26:12: ... 23%|██▎ | 7/30 [00:00<00:00, 198.04 it/sec, obj=-.474]
INFO - 16:26:12:
INFO - 16:26:12: ... 27%|██▋ | 8/30 [00:00<00:00, 195.53 it/sec, obj=-.474]
INFO - 16:26:12:
INFO - 16:26:12: ... 30%|███ | 9/30 [00:00<00:00, 193.56 it/sec, obj=-.474]
INFO - 16:26:12:
INFO - 16:26:12:
INFO - 16:26:12: Optimization result:
INFO - 16:26:12: Optimizer info:
INFO - 16:26:12: Status: None
INFO - 16:26:12: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:26:12: Number of calls to the objective function by the optimizer: 10
INFO - 16:26:12: Solution:
INFO - 16:26:12: The solution is feasible.
INFO - 16:26:12: Objective: -0.47420064899179054
INFO - 16:26:12: Standardized constraints:
INFO - 16:26:12: g_1 = [-1.37160202e-02 -1.08468448e-02 -2.00236953e-02 -2.89254659e-02
INFO - 16:26:12: -3.62748381e-02 -2.40000000e-01 1.01363362e-13]
INFO - 16:26:12: Design space:
INFO - 16:26:12: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:12: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:12: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:12: | x_1[0] | 0.1 | 0.3207411976950831 | 0.4 | float |
INFO - 16:26:12: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:12: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:12: *** End StructureScenario execution (time: 0:00:00.058339) ***
INFO - 16:26:12: ... 30%|███ | 15/50 [00:04<00:09, 3.52 it/sec, obj=-2.57e+3]
WARNING - 16:26:12: MDAJacobi has reached its maximum number of iterations but the normed residual 1.8024621670060513e-14 is still above the tolerance 1e-14.
INFO - 16:26:12:
INFO - 16:26:12: *** Start PropulsionScenario execution ***
INFO - 16:26:12: PropulsionScenario
INFO - 16:26:12: Disciplines: SobieskiPropulsion
INFO - 16:26:12: MDO formulation: DisciplinaryOpt
INFO - 16:26:12: Optimization problem:
INFO - 16:26:12: minimize y_34(x_3)
INFO - 16:26:12: with respect to x_3
INFO - 16:26:12: subject to constraints:
INFO - 16:26:12: g_3(x_3) <= 0.0
INFO - 16:26:12: over the design space:
INFO - 16:26:12: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:12: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:12: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:12: | x_3 | 0.1 | 0.1637941876933404 | 1 | float |
INFO - 16:26:12: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:12: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:12: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:12:
INFO - 16:26:12: ... 3%|▎ | 1/30 [00:00<00:00, 1747.63 it/sec, obj=0.977]
INFO - 16:26:12:
INFO - 16:26:12: ... 7%|▋ | 2/30 [00:00<00:00, 459.90 it/sec, obj=0.973]
INFO - 16:26:12:
INFO - 16:26:12: ... 10%|█ | 3/30 [00:00<00:00, 425.77 it/sec, obj=0.973]
INFO - 16:26:12:
INFO - 16:26:12: ... 13%|█▎ | 4/30 [00:00<00:00, 230.51 it/sec, obj=0.973]
INFO - 16:26:12:
INFO - 16:26:12:
INFO - 16:26:12: Optimization result:
INFO - 16:26:12: Optimizer info:
INFO - 16:26:12: Status: None
INFO - 16:26:12: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:26:12: Number of calls to the objective function by the optimizer: 22
INFO - 16:26:12: Solution:
INFO - 16:26:12: The solution is feasible.
INFO - 16:26:12: Objective: 0.9731108113885157
INFO - 16:26:12: Standardized constraints:
INFO - 16:26:12: g_3 = [-7.43689242e-01 -2.56310758e-01 -1.11022302e-16 -1.79696269e-01]
INFO - 16:26:12: Design space:
INFO - 16:26:12: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:12: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:12: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:12: | x_3 | 0.1 | 0.1712460465484112 | 1 | float |
INFO - 16:26:12: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:12: *** End PropulsionScenario execution (time: 0:00:00.029188) ***
INFO - 16:26:12:
INFO - 16:26:12: *** Start AerodynamicsScenario execution ***
INFO - 16:26:12: AerodynamicsScenario
INFO - 16:26:12: Disciplines: SobieskiAerodynamics
INFO - 16:26:12: MDO formulation: DisciplinaryOpt
INFO - 16:26:12: Optimization problem:
INFO - 16:26:12: minimize -y_24(x_2)
INFO - 16:26:12: with respect to x_2
INFO - 16:26:12: subject to constraints:
INFO - 16:26:12: g_2(x_2) <= 0.0
INFO - 16:26:12: over the design space:
INFO - 16:26:12: +------+-------------+-------+-------------+-------+
INFO - 16:26:12: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:12: +------+-------------+-------+-------------+-------+
INFO - 16:26:12: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:12: +------+-------------+-------+-------------+-------+
INFO - 16:26:12: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:12: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:12:
INFO - 16:26:12: ... 3%|▎ | 1/30 [00:00<00:00, 995.80 it/sec, obj=-6.45]
INFO - 16:26:12:
INFO - 16:26:12:
INFO - 16:26:12: Optimization result:
INFO - 16:26:12: Optimizer info:
INFO - 16:26:12: Status: 8
INFO - 16:26:12: Message: Positive directional derivative for linesearch
INFO - 16:26:12: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:12: Solution:
INFO - 16:26:12: The solution is feasible.
INFO - 16:26:12: Objective: -6.446121500379364
INFO - 16:26:12: Standardized constraints:
INFO - 16:26:12: g_2 = -0.006592326650419755
INFO - 16:26:12: Design space:
INFO - 16:26:12: +------+-------------+-------+-------------+-------+
INFO - 16:26:12: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:12: +------+-------------+-------+-------------+-------+
INFO - 16:26:12: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:12: +------+-------------+-------+-------------+-------+
INFO - 16:26:12: *** End AerodynamicsScenario execution (time: 0:00:00.014430) ***
INFO - 16:26:12:
INFO - 16:26:12: *** Start StructureScenario execution ***
INFO - 16:26:12: StructureScenario
INFO - 16:26:12: Disciplines: SobieskiStructure
INFO - 16:26:12: MDO formulation: DisciplinaryOpt
INFO - 16:26:12: Optimization problem:
INFO - 16:26:12: minimize -y_11(x_1)
INFO - 16:26:12: with respect to x_1
INFO - 16:26:12: subject to constraints:
INFO - 16:26:12: g_1(x_1) <= 0.0
INFO - 16:26:12: over the design space:
INFO - 16:26:12: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:12: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:12: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:12: | x_1[0] | 0.1 | 0.3207411976950831 | 0.4 | float |
INFO - 16:26:12: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:12: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:12: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:12: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:12:
INFO - 16:26:12: ... 3%|▎ | 1/30 [00:00<00:00, 581.81 it/sec, obj=-.468]
INFO - 16:26:12:
INFO - 16:26:12: ... 7%|▋ | 2/30 [00:00<00:00, 257.19 it/sec, obj=-.367]
INFO - 16:26:12:
INFO - 16:26:12: ... 10%|█ | 3/30 [00:00<00:00, 230.96 it/sec, obj=-.382]
INFO - 16:26:12:
INFO - 16:26:12: ... 13%|█▎ | 4/30 [00:00<00:00, 214.12 it/sec, obj=-.392]
INFO - 16:26:12:
INFO - 16:26:12: ... 17%|█▋ | 5/30 [00:00<00:00, 199.68 it/sec, obj=-.453]
INFO - 16:26:12:
INFO - 16:26:12: ... 20%|██ | 6/30 [00:00<00:00, 196.19 it/sec, obj=-.466]
INFO - 16:26:12:
INFO - 16:26:12: ... 23%|██▎ | 7/30 [00:00<00:00, 192.69 it/sec, obj=-.466]
INFO - 16:26:12:
INFO - 16:26:12: ... 27%|██▋ | 8/30 [00:00<00:00, 191.02 it/sec, obj=-.466]
INFO - 16:26:12:
INFO - 16:26:12: ... 30%|███ | 9/30 [00:00<00:00, 189.77 it/sec, obj=-.466]
INFO - 16:26:12:
INFO - 16:26:12: ... 33%|███▎ | 10/30 [00:00<00:00, 188.69 it/sec, obj=-.466]
INFO - 16:26:12:
INFO - 16:26:12:
INFO - 16:26:12: Optimization result:
INFO - 16:26:12: Optimizer info:
INFO - 16:26:12: Status: None
INFO - 16:26:12: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:26:12: Number of calls to the objective function by the optimizer: 11
INFO - 16:26:12: Solution:
INFO - 16:26:12: The solution is feasible.
INFO - 16:26:12: Objective: -0.46573608229602165
INFO - 16:26:12: Standardized constraints:
INFO - 16:26:12: g_1 = [-1.18399734e-10 -1.42651862e-02 -2.72983344e-02 -3.70064010e-02
INFO - 16:26:12: -4.42651862e-02 -1.54344125e-01 -8.56558746e-02]
INFO - 16:26:12: Design space:
INFO - 16:26:12: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:12: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:12: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:12: | x_1[0] | 0.1 | 0.1053707207375994 | 0.4 | float |
INFO - 16:26:12: | x_1[1] | 0.75 | 0.7500000001550864 | 1.25 | float |
INFO - 16:26:12: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:12: *** End StructureScenario execution (time: 0:00:00.065263) ***
INFO - 16:26:12: ... 32%|███▏ | 16/50 [00:04<00:09, 3.46 it/sec, obj=-2.51e+3]
INFO - 16:26:12:
INFO - 16:26:12: *** Start PropulsionScenario execution ***
INFO - 16:26:12: PropulsionScenario
INFO - 16:26:12: Disciplines: SobieskiPropulsion
INFO - 16:26:12: MDO formulation: DisciplinaryOpt
INFO - 16:26:12: Optimization problem:
INFO - 16:26:12: minimize y_34(x_3)
INFO - 16:26:12: with respect to x_3
INFO - 16:26:12: subject to constraints:
INFO - 16:26:12: g_3(x_3) <= 0.0
INFO - 16:26:12: over the design space:
INFO - 16:26:12: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:12: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:12: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:12: | x_3 | 0.1 | 0.1712460465484112 | 1 | float |
INFO - 16:26:12: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:12: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:12: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:12:
INFO - 16:26:12: ... 3%|▎ | 1/30 [00:00<00:00, 1655.21 it/sec, obj=1.02]
INFO - 16:26:12:
INFO - 16:26:12: ... 7%|▋ | 2/30 [00:00<00:00, 453.98 it/sec, obj=1.01]
INFO - 16:26:12:
INFO - 16:26:12: ... 10%|█ | 3/30 [00:00<00:00, 422.43 it/sec, obj=1.01]
INFO - 16:26:12:
INFO - 16:26:12: ... 13%|█▎ | 4/30 [00:00<00:00, 437.40 it/sec, obj=1.01]
INFO - 16:26:12:
INFO - 16:26:12:
INFO - 16:26:12: Optimization result:
INFO - 16:26:12: Optimizer info:
INFO - 16:26:12: Status: None
INFO - 16:26:12: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:26:12: Number of calls to the objective function by the optimizer: 5
INFO - 16:26:12: Solution:
INFO - 16:26:12: The solution is feasible.
INFO - 16:26:12: Objective: 1.0074936665977883
INFO - 16:26:12: Standardized constraints:
INFO - 16:26:12: g_3 = [-7.32109602e-01 -2.67890398e-01 6.66133815e-16 -1.79257416e-01]
INFO - 16:26:12: Design space:
INFO - 16:26:12: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:12: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:12: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:12: | x_3 | 0.1 | 0.1906737348891081 | 1 | float |
INFO - 16:26:12: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:12: *** End PropulsionScenario execution (time: 0:00:00.021433) ***
INFO - 16:26:12:
INFO - 16:26:12: *** Start AerodynamicsScenario execution ***
INFO - 16:26:12: AerodynamicsScenario
INFO - 16:26:12: Disciplines: SobieskiAerodynamics
INFO - 16:26:12: MDO formulation: DisciplinaryOpt
INFO - 16:26:12: Optimization problem:
INFO - 16:26:12: minimize -y_24(x_2)
INFO - 16:26:12: with respect to x_2
INFO - 16:26:12: subject to constraints:
INFO - 16:26:12: g_2(x_2) <= 0.0
INFO - 16:26:12: over the design space:
INFO - 16:26:12: +------+-------------+-------+-------------+-------+
INFO - 16:26:12: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:12: +------+-------------+-------+-------------+-------+
INFO - 16:26:12: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:12: +------+-------------+-------+-------------+-------+
INFO - 16:26:12: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:12: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:12:
INFO - 16:26:12: ... 3%|▎ | 1/30 [00:00<00:00, 1001.27 it/sec, obj=-5.9]
INFO - 16:26:12:
INFO - 16:26:12:
INFO - 16:26:12: Optimization result:
INFO - 16:26:12: Optimizer info:
INFO - 16:26:12: Status: 8
INFO - 16:26:12: Message: Positive directional derivative for linesearch
INFO - 16:26:12: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:12: Solution:
INFO - 16:26:12: The solution is feasible.
INFO - 16:26:12: Objective: -5.904912939792554
INFO - 16:26:12: Standardized constraints:
INFO - 16:26:12: g_2 = -0.007128951629473468
INFO - 16:26:12: Design space:
INFO - 16:26:12: +------+-------------+-------+-------------+-------+
INFO - 16:26:12: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:12: +------+-------------+-------+-------------+-------+
INFO - 16:26:12: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:12: +------+-------------+-------+-------------+-------+
INFO - 16:26:12: *** End AerodynamicsScenario execution (time: 0:00:00.014347) ***
INFO - 16:26:12:
INFO - 16:26:12: *** Start StructureScenario execution ***
INFO - 16:26:12: StructureScenario
INFO - 16:26:12: Disciplines: SobieskiStructure
INFO - 16:26:12: MDO formulation: DisciplinaryOpt
INFO - 16:26:12: Optimization problem:
INFO - 16:26:12: minimize -y_11(x_1)
INFO - 16:26:12: with respect to x_1
INFO - 16:26:12: subject to constraints:
INFO - 16:26:12: g_1(x_1) <= 0.0
INFO - 16:26:12: over the design space:
INFO - 16:26:12: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:12: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:12: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:12: | x_1[0] | 0.1 | 0.1053707207375994 | 0.4 | float |
INFO - 16:26:12: | x_1[1] | 0.75 | 0.7500000001550864 | 1.25 | float |
INFO - 16:26:12: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:12: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:12: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:12:
INFO - 16:26:12: ... 3%|▎ | 1/30 [00:00<00:00, 581.73 it/sec, obj=-.471]
INFO - 16:26:12:
INFO - 16:26:12: ... 7%|▋ | 2/30 [00:00<00:00, 254.66 it/sec, obj=-.471]
INFO - 16:26:12:
INFO - 16:26:12: ... 10%|█ | 3/30 [00:00<00:00, 231.77 it/sec, obj=-.471]
INFO - 16:26:12:
INFO - 16:26:12: ... 13%|█▎ | 4/30 [00:00<00:00, 215.11 it/sec, obj=-.471]
INFO - 16:26:12:
INFO - 16:26:12:
INFO - 16:26:12: Optimization result:
INFO - 16:26:12: Optimizer info:
INFO - 16:26:12: Status: None
INFO - 16:26:12: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:26:12: Number of calls to the objective function by the optimizer: 5
INFO - 16:26:12: Solution:
INFO - 16:26:12: The solution is feasible.
INFO - 16:26:12: Objective: -0.4707258532110072
INFO - 16:26:12: Standardized constraints:
INFO - 16:26:12: g_1 = [-7.14561743e-11 -1.45389238e-02 -2.76062893e-02 -3.73020377e-02
INFO - 16:26:12: -4.45389238e-02 -1.51758318e-01 -8.82416822e-02]
INFO - 16:26:12: Design space:
INFO - 16:26:12: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:12: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:12: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:12: | x_1[0] | 0.1 | 0.1011926693246881 | 0.4 | float |
INFO - 16:26:12: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:12: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:12: *** End StructureScenario execution (time: 0:00:00.030423) ***
WARNING - 16:26:13: MDAJacobi has reached its maximum number of iterations but the normed residual 5.457492715902317e-14 is still above the tolerance 1e-14.
INFO - 16:26:13: ... 34%|███▍ | 17/50 [00:04<00:09, 3.43 it/sec, obj=-2.2e+3]
INFO - 16:26:13:
INFO - 16:26:13: *** Start PropulsionScenario execution ***
INFO - 16:26:13: PropulsionScenario
INFO - 16:26:13: Disciplines: SobieskiPropulsion
INFO - 16:26:13: MDO formulation: DisciplinaryOpt
INFO - 16:26:13: Optimization problem:
INFO - 16:26:13: minimize y_34(x_3)
INFO - 16:26:13: with respect to x_3
INFO - 16:26:13: subject to constraints:
INFO - 16:26:13: g_3(x_3) <= 0.0
INFO - 16:26:13: over the design space:
INFO - 16:26:13: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:13: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:13: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:13: | x_3 | 0.1 | 0.1906737348891081 | 1 | float |
INFO - 16:26:13: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:13: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:13: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:13:
INFO - 16:26:13: ... 3%|▎ | 1/30 [00:00<00:00, 1799.36 it/sec, obj=0.936]
INFO - 16:26:13:
INFO - 16:26:13: ... 7%|▋ | 2/30 [00:00<00:00, 459.55 it/sec, obj=0.947]
INFO - 16:26:13:
INFO - 16:26:13: ... 10%|█ | 3/30 [00:00<00:00, 512.00 it/sec, obj=0.938]
INFO - 16:26:13:
INFO - 16:26:13: ... 13%|█▎ | 4/30 [00:00<00:00, 436.29 it/sec, obj=0.947]
INFO - 16:26:13:
INFO - 16:26:13:
INFO - 16:26:13: Optimization result:
INFO - 16:26:13: Optimizer info:
INFO - 16:26:13: Status: 8
INFO - 16:26:13: Message: Positive directional derivative for linesearch
INFO - 16:26:13: Number of calls to the objective function by the optimizer: 5
INFO - 16:26:13: Solution:
INFO - 16:26:13: The solution is feasible.
INFO - 16:26:13: Objective: 0.9473255645867308
INFO - 16:26:13: Standardized constraints:
INFO - 16:26:13: g_3 = [-7.84048646e-01 -2.15951354e-01 4.44089210e-16 -1.81511775e-01]
INFO - 16:26:13: Design space:
INFO - 16:26:13: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:13: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:13: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:13: | x_3 | 0.1 | 0.1625189423846049 | 1 | float |
INFO - 16:26:13: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:13: *** End PropulsionScenario execution (time: 0:00:00.027255) ***
INFO - 16:26:13:
INFO - 16:26:13: *** Start AerodynamicsScenario execution ***
INFO - 16:26:13: AerodynamicsScenario
INFO - 16:26:13: Disciplines: SobieskiAerodynamics
INFO - 16:26:13: MDO formulation: DisciplinaryOpt
INFO - 16:26:13: Optimization problem:
INFO - 16:26:13: minimize -y_24(x_2)
INFO - 16:26:13: with respect to x_2
INFO - 16:26:13: subject to constraints:
INFO - 16:26:13: g_2(x_2) <= 0.0
INFO - 16:26:13: over the design space:
INFO - 16:26:13: +------+-------------+-------+-------------+-------+
INFO - 16:26:13: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:13: +------+-------------+-------+-------------+-------+
INFO - 16:26:13: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:13: +------+-------------+-------+-------------+-------+
INFO - 16:26:13: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:13: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:13:
INFO - 16:26:13: ... 3%|▎ | 1/30 [00:00<00:00, 996.98 it/sec, obj=-6.73]
INFO - 16:26:13:
INFO - 16:26:13:
INFO - 16:26:13: Optimization result:
INFO - 16:26:13: Optimizer info:
INFO - 16:26:13: Status: 8
INFO - 16:26:13: Message: Positive directional derivative for linesearch
INFO - 16:26:13: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:13: Solution:
INFO - 16:26:13: The solution is feasible.
INFO - 16:26:13: Objective: -6.729738181724302
INFO - 16:26:13: Standardized constraints:
INFO - 16:26:13: g_2 = -0.005752973418739593
INFO - 16:26:13: Design space:
INFO - 16:26:13: +------+-------------+-------+-------------+-------+
INFO - 16:26:13: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:13: +------+-------------+-------+-------------+-------+
INFO - 16:26:13: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:13: +------+-------------+-------+-------------+-------+
INFO - 16:26:13: *** End AerodynamicsScenario execution (time: 0:00:00.014550) ***
INFO - 16:26:13:
INFO - 16:26:13: *** Start StructureScenario execution ***
INFO - 16:26:13: StructureScenario
INFO - 16:26:13: Disciplines: SobieskiStructure
INFO - 16:26:13: MDO formulation: DisciplinaryOpt
INFO - 16:26:13: Optimization problem:
INFO - 16:26:13: minimize -y_11(x_1)
INFO - 16:26:13: with respect to x_1
INFO - 16:26:13: subject to constraints:
INFO - 16:26:13: g_1(x_1) <= 0.0
INFO - 16:26:13: over the design space:
INFO - 16:26:13: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:13: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:13: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:13: | x_1[0] | 0.1 | 0.1011926693246881 | 0.4 | float |
INFO - 16:26:13: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:13: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:13: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:13: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:13:
INFO - 16:26:13: ... 3%|▎ | 1/30 [00:00<00:00, 577.17 it/sec, obj=-.462]
INFO - 16:26:13:
INFO - 16:26:13: ... 7%|▋ | 2/30 [00:00<00:00, 251.92 it/sec, obj=-.462]
INFO - 16:26:13:
INFO - 16:26:13: ... 10%|█ | 3/30 [00:00<00:00, 230.38 it/sec, obj=-.462]
INFO - 16:26:13:
INFO - 16:26:13: ... 13%|█▎ | 4/30 [00:00<00:00, 214.41 it/sec, obj=-.463]
INFO - 16:26:13:
INFO - 16:26:13: ... 17%|█▋ | 5/30 [00:00<00:00, 206.17 it/sec, obj=-.463]
INFO - 16:26:13:
INFO - 16:26:13: ... 20%|██ | 6/30 [00:00<00:00, 201.28 it/sec, obj=-.463]
INFO - 16:26:13:
INFO - 16:26:13: ... 23%|██▎ | 7/30 [00:00<00:00, 197.87 it/sec, obj=-.463]
INFO - 16:26:13:
INFO - 16:26:13: ... 27%|██▋ | 8/30 [00:00<00:00, 195.36 it/sec, obj=-.463]
INFO - 16:26:13:
INFO - 16:26:13:
INFO - 16:26:13: Optimization result:
INFO - 16:26:13: Optimizer info:
INFO - 16:26:13: Status: None
INFO - 16:26:13: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:26:13: Number of calls to the objective function by the optimizer: 9
INFO - 16:26:13: Solution:
INFO - 16:26:13: The solution is feasible.
INFO - 16:26:13: Objective: -0.46272917670502467
INFO - 16:26:13: Standardized constraints:
INFO - 16:26:13: g_1 = [ 3.10862447e-15 -1.45919486e-02 -2.76659422e-02 -3.73593045e-02
INFO - 16:26:13: -4.45919486e-02 -1.55447764e-01 -8.45522363e-02]
INFO - 16:26:13: Design space:
INFO - 16:26:13: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:13: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:13: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:13: | x_1[0] | 0.1 | 0.1423784710439869 | 0.4 | float |
INFO - 16:26:13: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:13: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:13: *** End StructureScenario execution (time: 0:00:00.053468) ***
INFO - 16:26:13: ... 36%|███▌ | 18/50 [00:05<00:09, 3.46 it/sec, obj=-2.76e+3]
INFO - 16:26:13:
INFO - 16:26:13: *** Start PropulsionScenario execution ***
INFO - 16:26:13: PropulsionScenario
INFO - 16:26:13: Disciplines: SobieskiPropulsion
INFO - 16:26:13: MDO formulation: DisciplinaryOpt
INFO - 16:26:13: Optimization problem:
INFO - 16:26:13: minimize y_34(x_3)
INFO - 16:26:13: with respect to x_3
INFO - 16:26:13: subject to constraints:
INFO - 16:26:13: g_3(x_3) <= 0.0
INFO - 16:26:13: over the design space:
INFO - 16:26:13: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:13: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:13: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:13: | x_3 | 0.1 | 0.1625189423846049 | 1 | float |
INFO - 16:26:13: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:13: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:13: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:13:
INFO - 16:26:13: ... 3%|▎ | 1/30 [00:00<00:00, 1855.07 it/sec, obj=0.944]
INFO - 16:26:13:
INFO - 16:26:13: ... 7%|▋ | 2/30 [00:00<00:00, 465.65 it/sec, obj=0.945]
INFO - 16:26:13:
INFO - 16:26:13: ... 10%|█ | 3/30 [00:00<00:00, 521.25 it/sec, obj=0.944]
INFO - 16:26:13:
INFO - 16:26:13: ... 13%|█▎ | 4/30 [00:00<00:00, 441.38 it/sec, obj=0.945]
INFO - 16:26:13:
INFO - 16:26:13: ... 17%|█▋ | 5/30 [00:00<00:00, 406.20 it/sec, obj=0.945]
INFO - 16:26:13:
INFO - 16:26:13: ... 20%|██ | 6/30 [00:00<00:00, 351.97 it/sec, obj=0.945]
INFO - 16:26:13:
INFO - 16:26:13:
INFO - 16:26:13: Optimization result:
INFO - 16:26:13: Optimizer info:
INFO - 16:26:13: Status: None
INFO - 16:26:13: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:26:13: Number of calls to the objective function by the optimizer: 7
INFO - 16:26:13: Solution:
INFO - 16:26:13: The solution is feasible.
INFO - 16:26:13: Objective: 0.9451077166343504
INFO - 16:26:13: Standardized constraints:
INFO - 16:26:13: g_3 = [-8.90471283e-01 -1.09528717e-01 2.22044605e-16 -1.79740946e-01]
INFO - 16:26:13: Design space:
INFO - 16:26:13: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:13: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:13: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:13: | x_3 | 0.1 | 0.1600373068220878 | 1 | float |
INFO - 16:26:13: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:13: *** End PropulsionScenario execution (time: 0:00:00.028957) ***
INFO - 16:26:13:
INFO - 16:26:13: *** Start AerodynamicsScenario execution ***
INFO - 16:26:13: AerodynamicsScenario
INFO - 16:26:13: Disciplines: SobieskiAerodynamics
INFO - 16:26:13: MDO formulation: DisciplinaryOpt
INFO - 16:26:13: Optimization problem:
INFO - 16:26:13: minimize -y_24(x_2)
INFO - 16:26:13: with respect to x_2
INFO - 16:26:13: subject to constraints:
INFO - 16:26:13: g_2(x_2) <= 0.0
INFO - 16:26:13: over the design space:
INFO - 16:26:13: +------+-------------+-------+-------------+-------+
INFO - 16:26:13: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:13: +------+-------------+-------+-------------+-------+
INFO - 16:26:13: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:13: +------+-------------+-------+-------------+-------+
INFO - 16:26:13: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:13: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:13:
INFO - 16:26:13: ... 3%|▎ | 1/30 [00:00<00:00, 971.80 it/sec, obj=-7.69]
INFO - 16:26:13:
WARNING - 16:26:13: Optimization found no feasible point ! The least infeasible point is selected.
INFO - 16:26:13:
INFO - 16:26:13: Optimization result:
INFO - 16:26:13: Optimizer info:
INFO - 16:26:13: Status: 8
INFO - 16:26:13: Message: Positive directional derivative for linesearch
INFO - 16:26:13: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:13: Solution:
WARNING - 16:26:13: The solution is not feasible.
INFO - 16:26:13: Objective: -7.685505183089808
INFO - 16:26:13: Standardized constraints:
INFO - 16:26:13: g_2 = 0.008407339558974547
INFO - 16:26:13: Design space:
INFO - 16:26:13: +------+-------------+-------+-------------+-------+
INFO - 16:26:13: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:13: +------+-------------+-------+-------------+-------+
INFO - 16:26:13: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:13: +------+-------------+-------+-------------+-------+
INFO - 16:26:13: *** End AerodynamicsScenario execution (time: 0:00:00.014845) ***
INFO - 16:26:13:
INFO - 16:26:13: *** Start StructureScenario execution ***
INFO - 16:26:13: StructureScenario
INFO - 16:26:13: Disciplines: SobieskiStructure
INFO - 16:26:13: MDO formulation: DisciplinaryOpt
INFO - 16:26:13: Optimization problem:
INFO - 16:26:13: minimize -y_11(x_1)
INFO - 16:26:13: with respect to x_1
INFO - 16:26:13: subject to constraints:
INFO - 16:26:13: g_1(x_1) <= 0.0
INFO - 16:26:13: over the design space:
INFO - 16:26:13: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:13: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:13: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:13: | x_1[0] | 0.1 | 0.1423784710439869 | 0.4 | float |
INFO - 16:26:13: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:13: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:13: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:13: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:13:
INFO - 16:26:13: ... 3%|▎ | 1/30 [00:00<00:00, 566.49 it/sec, obj=-.395]
INFO - 16:26:13:
INFO - 16:26:13: ... 7%|▋ | 2/30 [00:00<00:00, 251.17 it/sec, obj=-.395]
INFO - 16:26:13:
INFO - 16:26:13: ... 10%|█ | 3/30 [00:00<00:00, 230.26 it/sec, obj=-.395]
INFO - 16:26:13:
INFO - 16:26:13: ... 13%|█▎ | 4/30 [00:00<00:00, 215.23 it/sec, obj=-.395]
INFO - 16:26:13:
INFO - 16:26:13: ... 17%|█▋ | 5/30 [00:00<00:00, 207.00 it/sec, obj=-.396]
INFO - 16:26:13:
INFO - 16:26:13: ... 20%|██ | 6/30 [00:00<00:00, 201.62 it/sec, obj=-.397]
INFO - 16:26:13:
INFO - 16:26:13:
INFO - 16:26:13: Optimization result:
INFO - 16:26:13: Optimizer info:
INFO - 16:26:13: Status: 8
INFO - 16:26:13: Message: Positive directional derivative for linesearch
INFO - 16:26:13: Number of calls to the objective function by the optimizer: 7
INFO - 16:26:13: Solution:
INFO - 16:26:13: The solution is feasible.
INFO - 16:26:13: Objective: -0.397071015917275
INFO - 16:26:13: Standardized constraints:
INFO - 16:26:13: g_1 = [-0.02530497 -0.03021458 -0.03891516 -0.04613415 -0.05177959 -0.18366785
INFO - 16:26:13: -0.05633215]
INFO - 16:26:13: Design space:
INFO - 16:26:13: +--------+-------------+-------+-------------+-------+
INFO - 16:26:13: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:13: +--------+-------------+-------+-------------+-------+
INFO - 16:26:13: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:26:13: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:13: +--------+-------------+-------+-------------+-------+
INFO - 16:26:13: *** End StructureScenario execution (time: 0:00:00.045426) ***
WARNING - 16:26:13: MDAJacobi has reached its maximum number of iterations but the normed residual 2.6870836615612218e-14 is still above the tolerance 1e-14.
INFO - 16:26:13: ... 38%|███▊ | 19/50 [00:05<00:08, 3.46 it/sec, obj=-2.64e+3]
INFO - 16:26:13:
INFO - 16:26:13: *** Start PropulsionScenario execution ***
INFO - 16:26:13: PropulsionScenario
INFO - 16:26:13: Disciplines: SobieskiPropulsion
INFO - 16:26:13: MDO formulation: DisciplinaryOpt
INFO - 16:26:13: Optimization problem:
INFO - 16:26:13: minimize y_34(x_3)
INFO - 16:26:13: with respect to x_3
INFO - 16:26:13: subject to constraints:
INFO - 16:26:13: g_3(x_3) <= 0.0
INFO - 16:26:13: over the design space:
INFO - 16:26:13: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:13: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:13: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:13: | x_3 | 0.1 | 0.1600373068220878 | 1 | float |
INFO - 16:26:13: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:13: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:13: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:13:
INFO - 16:26:13: ... 3%|▎ | 1/30 [00:00<00:00, 1754.94 it/sec, obj=0.938]
INFO - 16:26:13:
INFO - 16:26:13: ... 7%|▋ | 2/30 [00:00<00:00, 458.49 it/sec, obj=0.938]
INFO - 16:26:13:
INFO - 16:26:13: ... 10%|█ | 3/30 [00:00<00:00, 515.17 it/sec, obj=0.938]
INFO - 16:26:13:
INFO - 16:26:13: ... 13%|█▎ | 4/30 [00:00<00:00, 438.16 it/sec, obj=0.938]
INFO - 16:26:13:
INFO - 16:26:13: ... 17%|█▋ | 5/30 [00:00<00:00, 404.71 it/sec, obj=0.938]
INFO - 16:26:13:
INFO - 16:26:13:
INFO - 16:26:13: Optimization result:
INFO - 16:26:13: Optimizer info:
INFO - 16:26:13: Status: 8
INFO - 16:26:13: Message: Positive directional derivative for linesearch
INFO - 16:26:13: Number of calls to the objective function by the optimizer: 6
INFO - 16:26:13: Solution:
INFO - 16:26:13: The solution is feasible.
INFO - 16:26:13: Objective: 0.9380904430205005
INFO - 16:26:13: Standardized constraints:
INFO - 16:26:13: g_3 = [-7.46053928e-01 -2.53946072e-01 2.22044605e-16 -1.81161283e-01]
INFO - 16:26:13: Design space:
INFO - 16:26:13: +------+-------------+------------------+-------------+-------+
INFO - 16:26:13: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:13: +------+-------------+------------------+-------------+-------+
INFO - 16:26:13: | x_3 | 0.1 | 0.15893574288253 | 1 | float |
INFO - 16:26:13: +------+-------------+------------------+-------------+-------+
INFO - 16:26:13: *** End PropulsionScenario execution (time: 0:00:00.030553) ***
INFO - 16:26:13:
INFO - 16:26:13: *** Start AerodynamicsScenario execution ***
INFO - 16:26:13: AerodynamicsScenario
INFO - 16:26:13: Disciplines: SobieskiAerodynamics
INFO - 16:26:13: MDO formulation: DisciplinaryOpt
INFO - 16:26:13: Optimization problem:
INFO - 16:26:13: minimize -y_24(x_2)
INFO - 16:26:13: with respect to x_2
INFO - 16:26:13: subject to constraints:
INFO - 16:26:13: g_2(x_2) <= 0.0
INFO - 16:26:13: over the design space:
INFO - 16:26:13: +------+-------------+-------+-------------+-------+
INFO - 16:26:13: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:13: +------+-------------+-------+-------------+-------+
INFO - 16:26:13: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:13: +------+-------------+-------+-------------+-------+
INFO - 16:26:13: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:13: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:13:
INFO - 16:26:13: ... 3%|▎ | 1/30 [00:00<00:00, 953.03 it/sec, obj=-7.03]
INFO - 16:26:13:
INFO - 16:26:13:
INFO - 16:26:13: Optimization result:
INFO - 16:26:13: Optimizer info:
INFO - 16:26:13: Status: 8
INFO - 16:26:13: Message: Positive directional derivative for linesearch
INFO - 16:26:13: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:13: Solution:
INFO - 16:26:13: The solution is feasible.
INFO - 16:26:13: Objective: -7.028655629274919
INFO - 16:26:13: Standardized constraints:
INFO - 16:26:13: g_2 = -0.0063450383543008915
INFO - 16:26:13: Design space:
INFO - 16:26:13: +------+-------------+-------+-------------+-------+
INFO - 16:26:13: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:13: +------+-------------+-------+-------------+-------+
INFO - 16:26:13: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:13: +------+-------------+-------+-------------+-------+
INFO - 16:26:13: *** End AerodynamicsScenario execution (time: 0:00:00.014704) ***
INFO - 16:26:13:
INFO - 16:26:13: *** Start StructureScenario execution ***
INFO - 16:26:13: StructureScenario
INFO - 16:26:13: Disciplines: SobieskiStructure
INFO - 16:26:13: MDO formulation: DisciplinaryOpt
INFO - 16:26:13: Optimization problem:
INFO - 16:26:13: minimize -y_11(x_1)
INFO - 16:26:13: with respect to x_1
INFO - 16:26:13: subject to constraints:
INFO - 16:26:13: g_1(x_1) <= 0.0
INFO - 16:26:13: over the design space:
INFO - 16:26:13: +--------+-------------+-------+-------------+-------+
INFO - 16:26:13: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:13: +--------+-------------+-------+-------------+-------+
INFO - 16:26:13: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:26:13: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:13: +--------+-------------+-------+-------------+-------+
INFO - 16:26:13: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:13: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:13:
INFO - 16:26:13: ... 3%|▎ | 1/30 [00:00<00:00, 594.60 it/sec, obj=-.451]
INFO - 16:26:13:
INFO - 16:26:13: ... 7%|▋ | 2/30 [00:00<00:00, 256.24 it/sec, obj=-.356]
INFO - 16:26:13:
INFO - 16:26:13: ... 10%|█ | 3/30 [00:00<00:00, 233.61 it/sec, obj=-.371]
INFO - 16:26:13:
INFO - 16:26:13: ... 13%|█▎ | 4/30 [00:00<00:00, 216.39 it/sec, obj=-.375]
INFO - 16:26:13:
INFO - 16:26:13: ... 17%|█▋ | 5/30 [00:00<00:00, 204.92 it/sec, obj=-.395]
INFO - 16:26:13:
INFO - 16:26:13: ... 20%|██ | 6/30 [00:00<00:00, 200.27 it/sec, obj=-.448]
INFO - 16:26:13:
INFO - 16:26:13: ... 23%|██▎ | 7/30 [00:00<00:00, 196.85 it/sec, obj=-.448]
INFO - 16:26:13:
INFO - 16:26:13: ... 27%|██▋ | 8/30 [00:00<00:00, 193.70 it/sec, obj=-.448]
INFO - 16:26:13:
INFO - 16:26:13: ... 30%|███ | 9/30 [00:00<00:00, 191.94 it/sec, obj=-.449]
INFO - 16:26:13:
INFO - 16:26:13: ... 33%|███▎ | 10/30 [00:00<00:00, 190.46 it/sec, obj=-.449]
INFO - 16:26:13:
INFO - 16:26:13: ... 37%|███▋ | 11/30 [00:00<00:00, 189.51 it/sec, obj=-.449]
INFO - 16:26:13:
INFO - 16:26:13: ... 40%|████ | 12/30 [00:00<00:00, 188.67 it/sec, obj=-.449]
INFO - 16:26:13:
INFO - 16:26:13:
INFO - 16:26:13: Optimization result:
INFO - 16:26:13: Optimizer info:
INFO - 16:26:13: Status: None
INFO - 16:26:13: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:26:13: Number of calls to the objective function by the optimizer: 13
INFO - 16:26:13: Solution:
INFO - 16:26:13: The solution is feasible.
INFO - 16:26:13: Objective: -0.44859331221952764
INFO - 16:26:13: Standardized constraints:
INFO - 16:26:13: g_1 = [-7.58927809e-10 -1.56463195e-02 -2.88521093e-02 -3.84980248e-02
INFO - 16:26:13: -4.56463193e-02 -1.49823805e-01 -9.01761945e-02]
INFO - 16:26:13: Design space:
INFO - 16:26:13: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:13: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:13: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:13: | x_1[0] | 0.1 | 0.1704164366660615 | 0.4 | float |
INFO - 16:26:13: | x_1[1] | 0.75 | 0.750000000318732 | 1.25 | float |
INFO - 16:26:13: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:13: *** End StructureScenario execution (time: 0:00:00.074622) ***
INFO - 16:26:13: ... 40%|████ | 20/50 [00:05<00:08, 3.44 it/sec, obj=-2.74e+3]
WARNING - 16:26:14: MDAJacobi has reached its maximum number of iterations but the normed residual 3.927284350020565e-12 is still above the tolerance 1e-14.
INFO - 16:26:14:
INFO - 16:26:14: *** Start PropulsionScenario execution ***
INFO - 16:26:14: PropulsionScenario
INFO - 16:26:14: Disciplines: SobieskiPropulsion
INFO - 16:26:14: MDO formulation: DisciplinaryOpt
INFO - 16:26:14: Optimization problem:
INFO - 16:26:14: minimize y_34(x_3)
INFO - 16:26:14: with respect to x_3
INFO - 16:26:14: subject to constraints:
INFO - 16:26:14: g_3(x_3) <= 0.0
INFO - 16:26:14: over the design space:
INFO - 16:26:14: +------+-------------+------------------+-------------+-------+
INFO - 16:26:14: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:14: +------+-------------+------------------+-------------+-------+
INFO - 16:26:14: | x_3 | 0.1 | 0.15893574288253 | 1 | float |
INFO - 16:26:14: +------+-------------+------------------+-------------+-------+
INFO - 16:26:14: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:14: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:14:
INFO - 16:26:14: ... 3%|▎ | 1/30 [00:00<00:00, 1055.97 it/sec, obj=0.923]
INFO - 16:26:14:
INFO - 16:26:14: ... 7%|▋ | 2/30 [00:00<00:00, 422.75 it/sec, obj=0.924]
INFO - 16:26:14:
INFO - 16:26:14: ... 10%|█ | 3/30 [00:00<00:00, 480.30 it/sec, obj=0.923]
INFO - 16:26:14:
INFO - 16:26:14: ... 13%|█▎ | 4/30 [00:00<00:00, 418.59 it/sec, obj=0.924]
INFO - 16:26:14:
INFO - 16:26:14:
INFO - 16:26:14: Optimization result:
INFO - 16:26:14: Optimizer info:
INFO - 16:26:14: Status: 8
INFO - 16:26:14: Message: Positive directional derivative for linesearch
INFO - 16:26:14: Number of calls to the objective function by the optimizer: 8
INFO - 16:26:14: Solution:
INFO - 16:26:14: The solution is feasible.
INFO - 16:26:14: Objective: 0.9239330847904542
INFO - 16:26:14: Standardized constraints:
INFO - 16:26:14: g_3 = [-6.24137363e-01 -3.75862637e-01 2.22044605e-16 -1.83255000e-01]
INFO - 16:26:14: Design space:
INFO - 16:26:14: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:14: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:14: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:14: | x_3 | 0.1 | 0.1562447456462875 | 1 | float |
INFO - 16:26:14: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:14: *** End PropulsionScenario execution (time: 0:00:00.024748) ***
INFO - 16:26:14:
INFO - 16:26:14: *** Start AerodynamicsScenario execution ***
INFO - 16:26:14: AerodynamicsScenario
INFO - 16:26:14: Disciplines: SobieskiAerodynamics
INFO - 16:26:14: MDO formulation: DisciplinaryOpt
INFO - 16:26:14: Optimization problem:
INFO - 16:26:14: minimize -y_24(x_2)
INFO - 16:26:14: with respect to x_2
INFO - 16:26:14: subject to constraints:
INFO - 16:26:14: g_2(x_2) <= 0.0
INFO - 16:26:14: over the design space:
INFO - 16:26:14: +------+-------------+-------+-------------+-------+
INFO - 16:26:14: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:14: +------+-------------+-------+-------------+-------+
INFO - 16:26:14: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:14: +------+-------------+-------+-------------+-------+
INFO - 16:26:14: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:14: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:14:
INFO - 16:26:14: ... 3%|▎ | 1/30 [00:00<00:00, 955.64 it/sec, obj=-6.78]
INFO - 16:26:14:
WARNING - 16:26:14: Optimization found no feasible point ! The least infeasible point is selected.
INFO - 16:26:14:
INFO - 16:26:14: Optimization result:
INFO - 16:26:14: Optimizer info:
INFO - 16:26:14: Status: 8
INFO - 16:26:14: Message: Positive directional derivative for linesearch
INFO - 16:26:14: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:14: Solution:
WARNING - 16:26:14: The solution is not feasible.
INFO - 16:26:14: Objective: -6.783387674013111
INFO - 16:26:14: Standardized constraints:
INFO - 16:26:14: g_2 = 0.00013985320301790338
INFO - 16:26:14: Design space:
INFO - 16:26:14: +------+-------------+-------+-------------+-------+
INFO - 16:26:14: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:14: +------+-------------+-------+-------------+-------+
INFO - 16:26:14: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:14: +------+-------------+-------+-------------+-------+
INFO - 16:26:14: *** End AerodynamicsScenario execution (time: 0:00:00.020332) ***
INFO - 16:26:14:
INFO - 16:26:14: *** Start StructureScenario execution ***
INFO - 16:26:14: StructureScenario
INFO - 16:26:14: Disciplines: SobieskiStructure
INFO - 16:26:14: MDO formulation: DisciplinaryOpt
INFO - 16:26:14: Optimization problem:
INFO - 16:26:14: minimize -y_11(x_1)
INFO - 16:26:14: with respect to x_1
INFO - 16:26:14: subject to constraints:
INFO - 16:26:14: g_1(x_1) <= 0.0
INFO - 16:26:14: over the design space:
INFO - 16:26:14: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:14: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:14: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:14: | x_1[0] | 0.1 | 0.1704164366660615 | 0.4 | float |
INFO - 16:26:14: | x_1[1] | 0.75 | 0.750000000318732 | 1.25 | float |
INFO - 16:26:14: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:14: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:14: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:14:
INFO - 16:26:14: ... 3%|▎ | 1/30 [00:00<00:00, 580.45 it/sec, obj=-.456]
INFO - 16:26:14:
INFO - 16:26:14: ... 7%|▋ | 2/30 [00:00<00:00, 255.98 it/sec, obj=-.456]
INFO - 16:26:14:
INFO - 16:26:14: ... 10%|█ | 3/30 [00:00<00:00, 233.13 it/sec, obj=-.456]
INFO - 16:26:14:
INFO - 16:26:14: ... 13%|█▎ | 4/30 [00:00<00:00, 216.55 it/sec, obj=-.456]
INFO - 16:26:14:
INFO - 16:26:14: ... 17%|█▋ | 5/30 [00:00<00:00, 205.17 it/sec, obj=-.457]
INFO - 16:26:14:
INFO - 16:26:14: ... 20%|██ | 6/30 [00:00<00:00, 200.51 it/sec, obj=-.457]
INFO - 16:26:14:
INFO - 16:26:14: ... 23%|██▎ | 7/30 [00:00<00:00, 197.40 it/sec, obj=-.457]
INFO - 16:26:14:
INFO - 16:26:14: ... 27%|██▋ | 8/30 [00:00<00:00, 194.30 it/sec, obj=-.457]
INFO - 16:26:14:
INFO - 16:26:14: ... 30%|███ | 9/30 [00:00<00:00, 192.50 it/sec, obj=-.457]
INFO - 16:26:14:
INFO - 16:26:14:
INFO - 16:26:14: Optimization result:
INFO - 16:26:14: Optimizer info:
INFO - 16:26:14: Status: None
INFO - 16:26:14: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:26:14: Number of calls to the objective function by the optimizer: 10
INFO - 16:26:14: Solution:
INFO - 16:26:14: The solution is feasible.
INFO - 16:26:14: Objective: -0.45670240140183055
INFO - 16:26:14: Standardized constraints:
INFO - 16:26:14: g_1 = [-3.77475828e-15 -1.43890166e-02 -2.74376436e-02 -3.71401379e-02
INFO - 16:26:14: -4.43890166e-02 -1.74383417e-01 -6.56165833e-02]
INFO - 16:26:14: Design space:
INFO - 16:26:14: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:14: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:14: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:14: | x_1[0] | 0.1 | 0.3038300592499111 | 0.4 | float |
INFO - 16:26:14: | x_1[1] | 0.75 | 0.7500000000000001 | 1.25 | float |
INFO - 16:26:14: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:14: *** End StructureScenario execution (time: 0:00:00.059072) ***
WARNING - 16:26:14: MDAJacobi has reached its maximum number of iterations but the normed residual 8.316133233586605e-14 is still above the tolerance 1e-14.
INFO - 16:26:14: ... 42%|████▏ | 21/50 [00:06<00:08, 3.39 it/sec, obj=-2.7e+3]
INFO - 16:26:14:
INFO - 16:26:14: *** Start PropulsionScenario execution ***
INFO - 16:26:14: PropulsionScenario
INFO - 16:26:14: Disciplines: SobieskiPropulsion
INFO - 16:26:14: MDO formulation: DisciplinaryOpt
INFO - 16:26:14: Optimization problem:
INFO - 16:26:14: minimize y_34(x_3)
INFO - 16:26:14: with respect to x_3
INFO - 16:26:14: subject to constraints:
INFO - 16:26:14: g_3(x_3) <= 0.0
INFO - 16:26:14: over the design space:
INFO - 16:26:14: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:14: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:14: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:14: | x_3 | 0.1 | 0.1562447456462875 | 1 | float |
INFO - 16:26:14: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:14: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:14: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:14:
INFO - 16:26:14: ... 3%|▎ | 1/30 [00:00<00:00, 1669.71 it/sec, obj=0.947]
INFO - 16:26:14:
INFO - 16:26:14: ... 7%|▋ | 2/30 [00:00<00:00, 458.02 it/sec, obj=0.945]
INFO - 16:26:14:
INFO - 16:26:14: ... 10%|█ | 3/30 [00:00<00:00, 425.37 it/sec, obj=0.945]
INFO - 16:26:14:
INFO - 16:26:14:
INFO - 16:26:14: Optimization result:
INFO - 16:26:14: Optimizer info:
INFO - 16:26:14: Status: 8
INFO - 16:26:14: Message: Positive directional derivative for linesearch
INFO - 16:26:14: Number of calls to the objective function by the optimizer: 14
INFO - 16:26:14: Solution:
INFO - 16:26:14: The solution is feasible.
INFO - 16:26:14: Objective: 0.9451077166343506
INFO - 16:26:14: Standardized constraints:
INFO - 16:26:14: g_3 = [-7.98118649e-01 -2.01881351e-01 -3.33066907e-16 -1.79740946e-01]
INFO - 16:26:14: Design space:
INFO - 16:26:14: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:14: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:14: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:14: | x_3 | 0.1 | 0.1600373068220877 | 1 | float |
INFO - 16:26:14: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:14: *** End PropulsionScenario execution (time: 0:00:00.026108) ***
INFO - 16:26:14:
INFO - 16:26:14: *** Start AerodynamicsScenario execution ***
INFO - 16:26:14: AerodynamicsScenario
INFO - 16:26:14: Disciplines: SobieskiAerodynamics
INFO - 16:26:14: MDO formulation: DisciplinaryOpt
INFO - 16:26:14: Optimization problem:
INFO - 16:26:14: minimize -y_24(x_2)
INFO - 16:26:14: with respect to x_2
INFO - 16:26:14: subject to constraints:
INFO - 16:26:14: g_2(x_2) <= 0.0
INFO - 16:26:14: over the design space:
INFO - 16:26:14: +------+-------------+-------+-------------+-------+
INFO - 16:26:14: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:14: +------+-------------+-------+-------------+-------+
INFO - 16:26:14: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:14: +------+-------------+-------+-------------+-------+
INFO - 16:26:14: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:14: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:14:
INFO - 16:26:14: ... 3%|▎ | 1/30 [00:00<00:00, 927.12 it/sec, obj=-6.83]
INFO - 16:26:14:
INFO - 16:26:14:
INFO - 16:26:14: Optimization result:
INFO - 16:26:14: Optimizer info:
INFO - 16:26:14: Status: 8
INFO - 16:26:14: Message: Positive directional derivative for linesearch
INFO - 16:26:14: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:14: Solution:
INFO - 16:26:14: The solution is feasible.
INFO - 16:26:14: Objective: -6.831273434980904
INFO - 16:26:14: Standardized constraints:
INFO - 16:26:14: g_2 = -0.011038943603721263
INFO - 16:26:14: Design space:
INFO - 16:26:14: +------+-------------+-------+-------------+-------+
INFO - 16:26:14: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:14: +------+-------------+-------+-------------+-------+
INFO - 16:26:14: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:14: +------+-------------+-------+-------------+-------+
INFO - 16:26:14: *** End AerodynamicsScenario execution (time: 0:00:00.015274) ***
INFO - 16:26:14:
INFO - 16:26:14: *** Start StructureScenario execution ***
INFO - 16:26:14: StructureScenario
INFO - 16:26:14: Disciplines: SobieskiStructure
INFO - 16:26:14: MDO formulation: DisciplinaryOpt
INFO - 16:26:14: Optimization problem:
INFO - 16:26:14: minimize -y_11(x_1)
INFO - 16:26:14: with respect to x_1
INFO - 16:26:14: subject to constraints:
INFO - 16:26:14: g_1(x_1) <= 0.0
INFO - 16:26:14: over the design space:
INFO - 16:26:14: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:14: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:14: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:14: | x_1[0] | 0.1 | 0.3038300592499111 | 0.4 | float |
INFO - 16:26:14: | x_1[1] | 0.75 | 0.7500000000000001 | 1.25 | float |
INFO - 16:26:14: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:14: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:14: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:14:
INFO - 16:26:14: ... 3%|▎ | 1/30 [00:00<00:00, 571.35 it/sec, obj=-.438]
INFO - 16:26:14:
INFO - 16:26:14: ... 7%|▋ | 2/30 [00:00<00:00, 251.77 it/sec, obj=-.279]
INFO - 16:26:14:
INFO - 16:26:14: ... 10%|█ | 3/30 [00:00<00:00, 229.22 it/sec, obj=-.303]
INFO - 16:26:14:
INFO - 16:26:14: ... 13%|█▎ | 4/30 [00:00<00:00, 211.96 it/sec, obj=-.305]
INFO - 16:26:14:
INFO - 16:26:14: ... 17%|█▋ | 5/30 [00:00<00:00, 202.51 it/sec, obj=-.311]
INFO - 16:26:14:
INFO - 16:26:14: ... 20%|██ | 6/30 [00:00<00:00, 198.24 it/sec, obj=-.34]
INFO - 16:26:14:
INFO - 16:26:14: ... 23%|██▎ | 7/30 [00:00<00:00, 195.09 it/sec, obj=-.345]
INFO - 16:26:14:
INFO - 16:26:14: ... 27%|██▋ | 8/30 [00:00<00:00, 191.23 it/sec, obj=-.345]
INFO - 16:26:14:
INFO - 16:26:14: ... 30%|███ | 9/30 [00:00<00:00, 188.51 it/sec, obj=-.345]
INFO - 16:26:14:
INFO - 16:26:14: ... 33%|███▎ | 10/30 [00:00<00:00, 186.60 it/sec, obj=-.345]
INFO - 16:26:14:
INFO - 16:26:14:
INFO - 16:26:14: Optimization result:
INFO - 16:26:14: Optimizer info:
INFO - 16:26:14: Status: None
INFO - 16:26:14: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:26:14: Number of calls to the objective function by the optimizer: 11
INFO - 16:26:14: Solution:
INFO - 16:26:14: The solution is feasible.
INFO - 16:26:14: Objective: -0.3450578669688391
INFO - 16:26:14: Standardized constraints:
INFO - 16:26:14: g_1 = [ 2.22044605e-16 -1.63479724e-02 -2.96414689e-02 -3.92558102e-02
INFO - 16:26:14: -4.63479724e-02 -1.56161507e-01 -8.38384926e-02]
INFO - 16:26:14: Design space:
INFO - 16:26:14: +--------+-------------+-------------------+-------------+-------+
INFO - 16:26:14: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:14: +--------+-------------+-------------------+-------------+-------+
INFO - 16:26:14: | x_1[0] | 0.1 | 0.1 | 0.4 | float |
INFO - 16:26:14: | x_1[1] | 0.75 | 0.820295320640582 | 1.25 | float |
INFO - 16:26:14: +--------+-------------+-------------------+-------------+-------+
INFO - 16:26:14: *** End StructureScenario execution (time: 0:00:00.065852) ***
INFO - 16:26:14: ... 44%|████▍ | 22/50 [00:06<00:08, 3.41 it/sec, obj=-2.47e+3]
INFO - 16:26:14:
INFO - 16:26:14: *** Start PropulsionScenario execution ***
INFO - 16:26:14: PropulsionScenario
INFO - 16:26:14: Disciplines: SobieskiPropulsion
INFO - 16:26:14: MDO formulation: DisciplinaryOpt
INFO - 16:26:14: Optimization problem:
INFO - 16:26:14: minimize y_34(x_3)
INFO - 16:26:14: with respect to x_3
INFO - 16:26:14: subject to constraints:
INFO - 16:26:14: g_3(x_3) <= 0.0
INFO - 16:26:14: over the design space:
INFO - 16:26:14: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:14: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:14: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:14: | x_3 | 0.1 | 0.1600373068220877 | 1 | float |
INFO - 16:26:14: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:14: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:14: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:14:
INFO - 16:26:14: ... 3%|▎ | 1/30 [00:00<00:00, 1617.55 it/sec, obj=0.922]
INFO - 16:26:14:
INFO - 16:26:14: ... 7%|▋ | 2/30 [00:00<00:00, 450.47 it/sec, obj=0.924]
INFO - 16:26:14:
INFO - 16:26:14: ... 10%|█ | 3/30 [00:00<00:00, 504.87 it/sec, obj=0.923]
INFO - 16:26:14:
INFO - 16:26:14: ... 13%|█▎ | 4/30 [00:00<00:00, 427.28 it/sec, obj=0.924]
INFO - 16:26:14:
INFO - 16:26:14:
INFO - 16:26:14: Optimization result:
INFO - 16:26:14: Optimizer info:
INFO - 16:26:14: Status: 8
INFO - 16:26:14: Message: Positive directional derivative for linesearch
INFO - 16:26:14: Number of calls to the objective function by the optimizer: 5
INFO - 16:26:14: Solution:
INFO - 16:26:14: The solution is feasible.
INFO - 16:26:14: Objective: 0.9239330847904544
INFO - 16:26:14: Standardized constraints:
INFO - 16:26:14: g_3 = [-0.78823173 -0.21176827 0. -0.183255 ]
INFO - 16:26:14: Design space:
INFO - 16:26:14: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:14: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:14: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:14: | x_3 | 0.1 | 0.1562447456462875 | 1 | float |
INFO - 16:26:14: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:14: *** End PropulsionScenario execution (time: 0:00:00.023401) ***
INFO - 16:26:14:
INFO - 16:26:14: *** Start AerodynamicsScenario execution ***
INFO - 16:26:14: AerodynamicsScenario
INFO - 16:26:14: Disciplines: SobieskiAerodynamics
INFO - 16:26:14: MDO formulation: DisciplinaryOpt
INFO - 16:26:14: Optimization problem:
INFO - 16:26:14: minimize -y_24(x_2)
INFO - 16:26:14: with respect to x_2
INFO - 16:26:14: subject to constraints:
INFO - 16:26:14: g_2(x_2) <= 0.0
INFO - 16:26:14: over the design space:
INFO - 16:26:14: +------+-------------+-------+-------------+-------+
INFO - 16:26:14: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:14: +------+-------------+-------+-------------+-------+
INFO - 16:26:14: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:14: +------+-------------+-------+-------------+-------+
INFO - 16:26:14: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:14: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:14:
INFO - 16:26:14: ... 3%|▎ | 1/30 [00:00<00:00, 892.79 it/sec, obj=-8.41]
INFO - 16:26:14:
INFO - 16:26:14:
INFO - 16:26:14: Optimization result:
INFO - 16:26:14: Optimizer info:
INFO - 16:26:14: Status: 8
INFO - 16:26:14: Message: Positive directional derivative for linesearch
INFO - 16:26:14: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:14: Solution:
INFO - 16:26:14: The solution is feasible.
INFO - 16:26:14: Objective: -8.407347624661165
INFO - 16:26:14: Standardized constraints:
INFO - 16:26:14: g_2 = -0.013610542713970997
INFO - 16:26:14: Design space:
INFO - 16:26:14: +------+-------------+-------+-------------+-------+
INFO - 16:26:14: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:14: +------+-------------+-------+-------------+-------+
INFO - 16:26:14: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:14: +------+-------------+-------+-------------+-------+
INFO - 16:26:14: *** End AerodynamicsScenario execution (time: 0:00:00.015089) ***
INFO - 16:26:14:
INFO - 16:26:14: *** Start StructureScenario execution ***
INFO - 16:26:14: StructureScenario
INFO - 16:26:14: Disciplines: SobieskiStructure
INFO - 16:26:14: MDO formulation: DisciplinaryOpt
INFO - 16:26:14: Optimization problem:
INFO - 16:26:14: minimize -y_11(x_1)
INFO - 16:26:14: with respect to x_1
INFO - 16:26:14: subject to constraints:
INFO - 16:26:14: g_1(x_1) <= 0.0
INFO - 16:26:14: over the design space:
INFO - 16:26:14: +--------+-------------+-------------------+-------------+-------+
INFO - 16:26:14: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:14: +--------+-------------+-------------------+-------------+-------+
INFO - 16:26:14: | x_1[0] | 0.1 | 0.1 | 0.4 | float |
INFO - 16:26:14: | x_1[1] | 0.75 | 0.820295320640582 | 1.25 | float |
INFO - 16:26:14: +--------+-------------+-------------------+-------------+-------+
INFO - 16:26:14: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:14: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:14:
INFO - 16:26:14: ... 3%|▎ | 1/30 [00:00<00:00, 557.16 it/sec, obj=-.371]
INFO - 16:26:14:
INFO - 16:26:14: ... 7%|▋ | 2/30 [00:00<00:00, 247.80 it/sec, obj=-.329]
INFO - 16:26:14:
INFO - 16:26:14: ... 10%|█ | 3/30 [00:00<00:00, 227.57 it/sec, obj=-.331]
INFO - 16:26:14:
INFO - 16:26:14: ... 13%|█▎ | 4/30 [00:00<00:00, 211.81 it/sec, obj=-.331]
INFO - 16:26:14:
INFO - 16:26:14: ... 17%|█▋ | 5/30 [00:00<00:00, 204.49 it/sec, obj=-.331]
INFO - 16:26:14:
INFO - 16:26:14: ... 20%|██ | 6/30 [00:00<00:00, 197.98 it/sec, obj=-.331]
INFO - 16:26:14:
INFO - 16:26:14:
INFO - 16:26:14: Optimization result:
INFO - 16:26:14: Optimizer info:
INFO - 16:26:14: Status: None
INFO - 16:26:14: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:26:14: Number of calls to the objective function by the optimizer: 7
INFO - 16:26:14: Solution:
INFO - 16:26:14: The solution is feasible.
INFO - 16:26:14: Objective: -0.3312030987947964
INFO - 16:26:14: Standardized constraints:
INFO - 16:26:14: g_1 = [-5.01820807e-14 -1.70371031e-02 -3.04167410e-02 -4.00000714e-02
INFO - 16:26:14: -4.70371031e-02 -1.55823865e-01 -8.41761346e-02]
INFO - 16:26:14: Design space:
INFO - 16:26:14: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:14: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:14: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:14: | x_1[0] | 0.1 | 0.1000000000000004 | 0.4 | float |
INFO - 16:26:14: | x_1[1] | 0.75 | 0.8531937548750231 | 1.25 | float |
INFO - 16:26:14: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:14: *** End StructureScenario execution (time: 0:00:00.042844) ***
INFO - 16:26:14: ... 46%|████▌ | 23/50 [00:06<00:07, 3.45 it/sec, obj=-2.67e+3]
INFO - 16:26:14:
INFO - 16:26:14: *** Start PropulsionScenario execution ***
INFO - 16:26:14: PropulsionScenario
INFO - 16:26:14: Disciplines: SobieskiPropulsion
INFO - 16:26:14: MDO formulation: DisciplinaryOpt
INFO - 16:26:14: Optimization problem:
INFO - 16:26:14: minimize y_34(x_3)
INFO - 16:26:14: with respect to x_3
INFO - 16:26:14: subject to constraints:
INFO - 16:26:14: g_3(x_3) <= 0.0
INFO - 16:26:14: over the design space:
INFO - 16:26:14: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:14: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:14: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:14: | x_3 | 0.1 | 0.1562447456462875 | 1 | float |
INFO - 16:26:14: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:14: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:14: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:14:
INFO - 16:26:14: ... 3%|▎ | 1/30 [00:00<00:00, 1749.08 it/sec, obj=0.966]
INFO - 16:26:14:
INFO - 16:26:14: ... 7%|▋ | 2/30 [00:00<00:00, 453.27 it/sec, obj=0.962]
INFO - 16:26:14:
INFO - 16:26:14: ... 10%|█ | 3/30 [00:00<00:00, 418.50 it/sec, obj=0.962]
INFO - 16:26:14:
INFO - 16:26:14:
INFO - 16:26:14: Optimization result:
INFO - 16:26:14: Optimizer info:
INFO - 16:26:14: Status: 8
INFO - 16:26:14: Message: Positive directional derivative for linesearch
INFO - 16:26:14: Number of calls to the objective function by the optimizer: 15
INFO - 16:26:14: Solution:
INFO - 16:26:14: The solution is feasible.
INFO - 16:26:14: Objective: 0.9619742939743128
INFO - 16:26:14: Standardized constraints:
INFO - 16:26:14: g_3 = [-7.62245368e-01 -2.37754632e-01 8.88178420e-16 -1.76751568e-01]
INFO - 16:26:14: Design space:
INFO - 16:26:14: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:14: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:14: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:14: | x_3 | 0.1 | 0.1633849021295946 | 1 | float |
INFO - 16:26:14: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:14: *** End PropulsionScenario execution (time: 0:00:00.028459) ***
INFO - 16:26:14:
INFO - 16:26:14: *** Start AerodynamicsScenario execution ***
INFO - 16:26:14: AerodynamicsScenario
INFO - 16:26:14: Disciplines: SobieskiAerodynamics
INFO - 16:26:14: MDO formulation: DisciplinaryOpt
INFO - 16:26:14: Optimization problem:
INFO - 16:26:14: minimize -y_24(x_2)
INFO - 16:26:14: with respect to x_2
INFO - 16:26:14: subject to constraints:
INFO - 16:26:14: g_2(x_2) <= 0.0
INFO - 16:26:14: over the design space:
INFO - 16:26:14: +------+-------------+-------+-------------+-------+
INFO - 16:26:14: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:14: +------+-------------+-------+-------------+-------+
INFO - 16:26:14: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:14: +------+-------------+-------+-------------+-------+
INFO - 16:26:14: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:14: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:14:
INFO - 16:26:14: ... 3%|▎ | 1/30 [00:00<00:00, 892.41 it/sec, obj=-8.76]
INFO - 16:26:14:
INFO - 16:26:14:
INFO - 16:26:14: Optimization result:
INFO - 16:26:14: Optimizer info:
INFO - 16:26:14: Status: 8
INFO - 16:26:14: Message: Positive directional derivative for linesearch
INFO - 16:26:14: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:14: Solution:
INFO - 16:26:14: The solution is feasible.
INFO - 16:26:14: Objective: -8.756093137971645
INFO - 16:26:14: Standardized constraints:
INFO - 16:26:14: g_2 = -0.009589548071351484
INFO - 16:26:14: Design space:
INFO - 16:26:14: +------+-------------+-------+-------------+-------+
INFO - 16:26:14: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:14: +------+-------------+-------+-------------+-------+
INFO - 16:26:14: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:14: +------+-------------+-------+-------------+-------+
INFO - 16:26:14: *** End AerodynamicsScenario execution (time: 0:00:00.015214) ***
INFO - 16:26:14:
INFO - 16:26:14: *** Start StructureScenario execution ***
INFO - 16:26:14: StructureScenario
INFO - 16:26:14: Disciplines: SobieskiStructure
INFO - 16:26:14: MDO formulation: DisciplinaryOpt
INFO - 16:26:14: Optimization problem:
INFO - 16:26:14: minimize -y_11(x_1)
INFO - 16:26:14: with respect to x_1
INFO - 16:26:14: subject to constraints:
INFO - 16:26:14: g_1(x_1) <= 0.0
INFO - 16:26:14: over the design space:
INFO - 16:26:14: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:14: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:14: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:14: | x_1[0] | 0.1 | 0.1000000000000004 | 0.4 | float |
INFO - 16:26:14: | x_1[1] | 0.75 | 0.8531937548750231 | 1.25 | float |
INFO - 16:26:14: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:14: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:14: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:14:
INFO - 16:26:14: ... 3%|▎ | 1/30 [00:00<00:00, 532.00 it/sec, obj=-.327]
INFO - 16:26:14:
INFO - 16:26:14: ... 7%|▋ | 2/30 [00:00<00:00, 245.41 it/sec, obj=-.358]
INFO - 16:26:14:
INFO - 16:26:14: ... 10%|█ | 3/30 [00:00<00:00, 226.78 it/sec, obj=-.36]
INFO - 16:26:14:
INFO - 16:26:14: ... 13%|█▎ | 4/30 [00:00<00:00, 211.84 it/sec, obj=-.36]
INFO - 16:26:14:
INFO - 16:26:14: ... 17%|█▋ | 5/30 [00:00<00:00, 203.41 it/sec, obj=-.36]
INFO - 16:26:14:
INFO - 16:26:14: ... 20%|██ | 6/30 [00:00<00:00, 198.91 it/sec, obj=-.36]
INFO - 16:26:14:
INFO - 16:26:14:
INFO - 16:26:14: Optimization result:
INFO - 16:26:14: Optimizer info:
INFO - 16:26:14: Status: None
INFO - 16:26:14: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:26:14: Number of calls to the objective function by the optimizer: 7
INFO - 16:26:14: Solution:
INFO - 16:26:14: The solution is feasible.
INFO - 16:26:14: Objective: -0.3599093035857404
INFO - 16:26:14: Standardized constraints:
INFO - 16:26:14: g_1 = [ 9.76996262e-14 -1.38525511e-02 -2.68341200e-02 -3.65607552e-02
INFO - 16:26:14: -4.38525511e-02 -1.72511249e-01 -6.74887509e-02]
INFO - 16:26:14: Design space:
INFO - 16:26:14: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:14: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:14: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:14: | x_1[0] | 0.1 | 0.1 | 0.4 | float |
INFO - 16:26:14: | x_1[1] | 0.75 | 0.8270353647279307 | 1.25 | float |
INFO - 16:26:14: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:14: *** End StructureScenario execution (time: 0:00:00.042381) ***
INFO - 16:26:15: ... 48%|████▊ | 24/50 [00:06<00:07, 3.47 it/sec, obj=-2.49e+3]
INFO - 16:26:15:
INFO - 16:26:15: *** Start PropulsionScenario execution ***
INFO - 16:26:15: PropulsionScenario
INFO - 16:26:15: Disciplines: SobieskiPropulsion
INFO - 16:26:15: MDO formulation: DisciplinaryOpt
INFO - 16:26:15: Optimization problem:
INFO - 16:26:15: minimize y_34(x_3)
INFO - 16:26:15: with respect to x_3
INFO - 16:26:15: subject to constraints:
INFO - 16:26:15: g_3(x_3) <= 0.0
INFO - 16:26:15: over the design space:
INFO - 16:26:15: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:15: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:15: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:15: | x_3 | 0.1 | 0.1633849021295946 | 1 | float |
INFO - 16:26:15: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:15: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:15: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:15:
INFO - 16:26:15: ... 3%|▎ | 1/30 [00:00<00:00, 1691.93 it/sec, obj=0.924]
INFO - 16:26:15:
INFO - 16:26:15: ... 7%|▋ | 2/30 [00:00<00:00, 444.45 it/sec, obj=0.927]
INFO - 16:26:15:
INFO - 16:26:15: ... 10%|█ | 3/30 [00:00<00:00, 475.15 it/sec, obj=0.924]
INFO - 16:26:15:
INFO - 16:26:15: ... 13%|█▎ | 4/30 [00:00<00:00, 415.29 it/sec, obj=0.927]
INFO - 16:26:15:
INFO - 16:26:15:
INFO - 16:26:15: Optimization result:
INFO - 16:26:15: Optimizer info:
INFO - 16:26:15: Status: 8
INFO - 16:26:15: Message: Positive directional derivative for linesearch
INFO - 16:26:15: Number of calls to the objective function by the optimizer: 5
INFO - 16:26:15: Solution:
INFO - 16:26:15: The solution is feasible.
INFO - 16:26:15: Objective: 0.9267319809973326
INFO - 16:26:15: Standardized constraints:
INFO - 16:26:15: g_3 = [-0.79547555 -0.20452445 0. -0.18295848]
INFO - 16:26:15: Design space:
INFO - 16:26:15: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:15: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:15: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:15: | x_3 | 0.1 | 0.1568543883351192 | 1 | float |
INFO - 16:26:15: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:15: *** End PropulsionScenario execution (time: 0:00:00.023812) ***
INFO - 16:26:15:
INFO - 16:26:15: *** Start AerodynamicsScenario execution ***
INFO - 16:26:15: AerodynamicsScenario
INFO - 16:26:15: Disciplines: SobieskiAerodynamics
INFO - 16:26:15: MDO formulation: DisciplinaryOpt
INFO - 16:26:15: Optimization problem:
INFO - 16:26:15: minimize -y_24(x_2)
INFO - 16:26:15: with respect to x_2
INFO - 16:26:15: subject to constraints:
INFO - 16:26:15: g_2(x_2) <= 0.0
INFO - 16:26:15: over the design space:
INFO - 16:26:15: +------+-------------+-------+-------------+-------+
INFO - 16:26:15: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:15: +------+-------------+-------+-------------+-------+
INFO - 16:26:15: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:15: +------+-------------+-------+-------------+-------+
INFO - 16:26:15: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:15: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:15:
INFO - 16:26:15: ... 3%|▎ | 1/30 [00:00<00:00, 821.29 it/sec, obj=-8.46]
INFO - 16:26:15:
INFO - 16:26:15:
INFO - 16:26:15: Optimization result:
INFO - 16:26:15: Optimizer info:
INFO - 16:26:15: Status: 8
INFO - 16:26:15: Message: Positive directional derivative for linesearch
INFO - 16:26:15: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:15: Solution:
INFO - 16:26:15: The solution is feasible.
INFO - 16:26:15: Objective: -8.462131845244242
INFO - 16:26:15: Standardized constraints:
INFO - 16:26:15: g_2 = -0.02500342674764755
INFO - 16:26:15: Design space:
INFO - 16:26:15: +------+-------------+-------+-------------+-------+
INFO - 16:26:15: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:15: +------+-------------+-------+-------------+-------+
INFO - 16:26:15: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:15: +------+-------------+-------+-------------+-------+
INFO - 16:26:15: *** End AerodynamicsScenario execution (time: 0:00:00.015228) ***
INFO - 16:26:15:
INFO - 16:26:15: *** Start StructureScenario execution ***
INFO - 16:26:15: StructureScenario
INFO - 16:26:15: Disciplines: SobieskiStructure
INFO - 16:26:15: MDO formulation: DisciplinaryOpt
INFO - 16:26:15: Optimization problem:
INFO - 16:26:15: minimize -y_11(x_1)
INFO - 16:26:15: with respect to x_1
INFO - 16:26:15: subject to constraints:
INFO - 16:26:15: g_1(x_1) <= 0.0
INFO - 16:26:15: over the design space:
INFO - 16:26:15: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:15: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:15: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:15: | x_1[0] | 0.1 | 0.1 | 0.4 | float |
INFO - 16:26:15: | x_1[1] | 0.75 | 0.8270353647279307 | 1.25 | float |
INFO - 16:26:15: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:15: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:15: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:15:
INFO - 16:26:15: ... 3%|▎ | 1/30 [00:00<00:00, 561.26 it/sec, obj=-.347]
INFO - 16:26:15:
INFO - 16:26:15: ... 7%|▋ | 2/30 [00:00<00:00, 240.77 it/sec, obj=-.232]
INFO - 16:26:15:
INFO - 16:26:15: ... 10%|█ | 3/30 [00:00<00:00, 223.30 it/sec, obj=-.247]
INFO - 16:26:15:
INFO - 16:26:15: ... 13%|█▎ | 4/30 [00:00<00:00, 209.47 it/sec, obj=-.248]
INFO - 16:26:15:
INFO - 16:26:15: ... 17%|█▋ | 5/30 [00:00<00:00, 202.83 it/sec, obj=-.248]
INFO - 16:26:15:
INFO - 16:26:15: ... 20%|██ | 6/30 [00:00<00:00, 198.23 it/sec, obj=-.248]
INFO - 16:26:15:
INFO - 16:26:15: ... 23%|██▎ | 7/30 [00:00<00:00, 195.40 it/sec, obj=-.248]
INFO - 16:26:15:
INFO - 16:26:15:
INFO - 16:26:15: Optimization result:
INFO - 16:26:15: Optimizer info:
INFO - 16:26:15: Status: None
INFO - 16:26:15: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:26:15: Number of calls to the objective function by the optimizer: 8
INFO - 16:26:15: Solution:
INFO - 16:26:15: The solution is feasible.
INFO - 16:26:15: Objective: -0.24809646661773732
INFO - 16:26:15: Standardized constraints:
INFO - 16:26:15: g_1 = [ 1.92956762e-13 -2.27790554e-02 -3.68764373e-02 -4.62013798e-02
INFO - 16:26:15: -5.27790554e-02 -1.24056787e-01 -1.15943213e-01]
INFO - 16:26:15: Design space:
INFO - 16:26:15: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:15: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:15: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:15: | x_1[0] | 0.1 | 0.1000000000000007 | 0.4 | float |
INFO - 16:26:15: | x_1[1] | 0.75 | 0.9420632085787479 | 1.25 | float |
INFO - 16:26:15: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:15: *** End StructureScenario execution (time: 0:00:00.048158) ***
INFO - 16:26:15: ... 50%|█████ | 25/50 [00:07<00:07, 3.51 it/sec, obj=-2.43e+3]
INFO - 16:26:15:
INFO - 16:26:15: *** Start PropulsionScenario execution ***
INFO - 16:26:15: PropulsionScenario
INFO - 16:26:15: Disciplines: SobieskiPropulsion
INFO - 16:26:15: MDO formulation: DisciplinaryOpt
INFO - 16:26:15: Optimization problem:
INFO - 16:26:15: minimize y_34(x_3)
INFO - 16:26:15: with respect to x_3
INFO - 16:26:15: subject to constraints:
INFO - 16:26:15: g_3(x_3) <= 0.0
INFO - 16:26:15: over the design space:
INFO - 16:26:15: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:15: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:15: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:15: | x_3 | 0.1 | 0.1568543883351192 | 1 | float |
INFO - 16:26:15: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:15: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:15: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:15:
INFO - 16:26:15: ... 3%|▎ | 1/30 [00:00<00:00, 1661.77 it/sec, obj=0.924]
INFO - 16:26:15:
INFO - 16:26:15: ... 7%|▋ | 2/30 [00:00<00:00, 449.21 it/sec, obj=0.924]
INFO - 16:26:15:
INFO - 16:26:15: ... 10%|█ | 3/30 [00:00<00:00, 507.13 it/sec, obj=0.924]
INFO - 16:26:15:
INFO - 16:26:15: ... 13%|█▎ | 4/30 [00:00<00:00, 433.67 it/sec, obj=0.924]
INFO - 16:26:15:
INFO - 16:26:15: ... 17%|█▋ | 5/30 [00:00<00:00, 394.28 it/sec, obj=0.924]
INFO - 16:26:15:
INFO - 16:26:15: ... 20%|██ | 6/30 [00:00<00:00, 372.08 it/sec, obj=0.924]
INFO - 16:26:15:
INFO - 16:26:15:
INFO - 16:26:15: Optimization result:
INFO - 16:26:15: Optimizer info:
INFO - 16:26:15: Status: None
INFO - 16:26:15: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:26:15: Number of calls to the objective function by the optimizer: 7
INFO - 16:26:15: Solution:
INFO - 16:26:15: The solution is feasible.
INFO - 16:26:15: Objective: 0.9239330847904542
INFO - 16:26:15: Standardized constraints:
INFO - 16:26:15: g_3 = [-7.97273784e-01 -2.02726216e-01 2.22044605e-16 -1.83255000e-01]
INFO - 16:26:15: Design space:
INFO - 16:26:15: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:15: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:15: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:15: | x_3 | 0.1 | 0.1562447456462875 | 1 | float |
INFO - 16:26:15: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:15: *** End PropulsionScenario execution (time: 0:00:00.028193) ***
INFO - 16:26:15:
INFO - 16:26:15: *** Start AerodynamicsScenario execution ***
INFO - 16:26:15: AerodynamicsScenario
INFO - 16:26:15: Disciplines: SobieskiAerodynamics
INFO - 16:26:15: MDO formulation: DisciplinaryOpt
INFO - 16:26:15: Optimization problem:
INFO - 16:26:15: minimize -y_24(x_2)
INFO - 16:26:15: with respect to x_2
INFO - 16:26:15: subject to constraints:
INFO - 16:26:15: g_2(x_2) <= 0.0
INFO - 16:26:15: over the design space:
INFO - 16:26:15: +------+-------------+-------+-------------+-------+
INFO - 16:26:15: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:15: +------+-------------+-------+-------------+-------+
INFO - 16:26:15: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:15: +------+-------------+-------+-------------+-------+
INFO - 16:26:15: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:15: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:15:
INFO - 16:26:15: ... 3%|▎ | 1/30 [00:00<00:00, 835.52 it/sec, obj=-11.9]
INFO - 16:26:15:
INFO - 16:26:15:
INFO - 16:26:15: Optimization result:
INFO - 16:26:15: Optimizer info:
INFO - 16:26:15: Status: 8
INFO - 16:26:15: Message: Positive directional derivative for linesearch
INFO - 16:26:15: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:15: Solution:
INFO - 16:26:15: The solution is feasible.
INFO - 16:26:15: Objective: -11.851760660201926
INFO - 16:26:15: Standardized constraints:
INFO - 16:26:15: g_2 = 2.1249668691325496e-13
INFO - 16:26:15: Design space:
INFO - 16:26:15: +------+-------------+-------+-------------+-------+
INFO - 16:26:15: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:15: +------+-------------+-------+-------------+-------+
INFO - 16:26:15: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:15: +------+-------------+-------+-------------+-------+
INFO - 16:26:15: *** End AerodynamicsScenario execution (time: 0:00:00.021300) ***
INFO - 16:26:15:
INFO - 16:26:15: *** Start StructureScenario execution ***
INFO - 16:26:15: StructureScenario
INFO - 16:26:15: Disciplines: SobieskiStructure
INFO - 16:26:15: MDO formulation: DisciplinaryOpt
INFO - 16:26:15: Optimization problem:
INFO - 16:26:15: minimize -y_11(x_1)
INFO - 16:26:15: with respect to x_1
INFO - 16:26:15: subject to constraints:
INFO - 16:26:15: g_1(x_1) <= 0.0
INFO - 16:26:15: over the design space:
INFO - 16:26:15: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:15: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:15: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:15: | x_1[0] | 0.1 | 0.1000000000000007 | 0.4 | float |
INFO - 16:26:15: | x_1[1] | 0.75 | 0.9420632085787479 | 1.25 | float |
INFO - 16:26:15: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:15: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:15: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:15:
INFO - 16:26:15: ... 3%|▎ | 1/30 [00:00<00:00, 545.42 it/sec, obj=-.263]
INFO - 16:26:15:
INFO - 16:26:15: ... 7%|▋ | 2/30 [00:00<00:00, 246.91 it/sec, obj=-.469]
INFO - 16:26:15:
INFO - 16:26:15: ... 10%|█ | 3/30 [00:00<00:00, 227.87 it/sec, obj=-.524]
INFO - 16:26:15:
INFO - 16:26:15: ... 13%|█▎ | 4/30 [00:00<00:00, 212.80 it/sec, obj=-.524]
INFO - 16:26:15:
INFO - 16:26:15: ... 17%|█▋ | 5/30 [00:00<00:00, 205.18 it/sec, obj=-.524]
INFO - 16:26:15:
INFO - 16:26:15: ... 20%|██ | 6/30 [00:00<00:00, 200.52 it/sec, obj=-.525]
INFO - 16:26:15:
INFO - 16:26:15: ... 23%|██▎ | 7/30 [00:00<00:00, 197.19 it/sec, obj=-.527]
INFO - 16:26:15:
INFO - 16:26:15: ... 27%|██▋ | 8/30 [00:00<00:00, 193.13 it/sec, obj=-.527]
INFO - 16:26:15:
INFO - 16:26:15: ... 30%|███ | 9/30 [00:00<00:00, 191.70 it/sec, obj=-.527]
INFO - 16:26:15:
INFO - 16:26:15: ... 33%|███▎ | 10/30 [00:00<00:00, 190.43 it/sec, obj=-.527]
INFO - 16:26:15:
INFO - 16:26:15: ... 37%|███▋ | 11/30 [00:00<00:00, 198.92 it/sec, obj=-.527]
INFO - 16:26:15:
INFO - 16:26:15:
INFO - 16:26:15: Optimization result:
INFO - 16:26:15: Optimizer info:
INFO - 16:26:15: Status: None
INFO - 16:26:15: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:26:15: Number of calls to the objective function by the optimizer: 12
INFO - 16:26:15: Solution:
INFO - 16:26:15: The solution is feasible.
INFO - 16:26:15: Objective: -0.5266780374770886
INFO - 16:26:15: Standardized constraints:
INFO - 16:26:15: g_1 = [ 5.17738141e-09 -1.20855060e-02 -2.48461955e-02 -3.46523481e-02
INFO - 16:26:15: -4.20855077e-02 -1.82343089e-01 -5.76569114e-02]
INFO - 16:26:15: Design space:
INFO - 16:26:15: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:15: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:15: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:15: | x_1[0] | 0.1 | 0.2397559337642204 | 0.4 | float |
INFO - 16:26:15: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:15: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:15: *** End StructureScenario execution (time: 0:00:00.067753) ***
INFO - 16:26:15: ... 52%|█████▏ | 26/50 [00:07<00:06, 3.52 it/sec, obj=-3e+3]
WARNING - 16:26:15: MDAJacobi has reached its maximum number of iterations but the normed residual 1.7359275648513367e-14 is still above the tolerance 1e-14.
INFO - 16:26:15:
INFO - 16:26:15: *** Start PropulsionScenario execution ***
INFO - 16:26:15: PropulsionScenario
INFO - 16:26:15: Disciplines: SobieskiPropulsion
INFO - 16:26:15: MDO formulation: DisciplinaryOpt
INFO - 16:26:15: Optimization problem:
INFO - 16:26:15: minimize y_34(x_3)
INFO - 16:26:15: with respect to x_3
INFO - 16:26:15: subject to constraints:
INFO - 16:26:15: g_3(x_3) <= 0.0
INFO - 16:26:15: over the design space:
INFO - 16:26:15: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:15: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:15: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:15: | x_3 | 0.1 | 0.1562447456462875 | 1 | float |
INFO - 16:26:15: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:15: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:15: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:15:
INFO - 16:26:15: ... 3%|▎ | 1/30 [00:00<00:00, 1790.91 it/sec, obj=0.924]
INFO - 16:26:15:
INFO - 16:26:15: ... 7%|▋ | 2/30 [00:00<00:00, 459.60 it/sec, obj=0.924]
INFO - 16:26:15:
INFO - 16:26:15: ... 10%|█ | 3/30 [00:00<00:00, 512.75 it/sec, obj=0.924]
INFO - 16:26:15:
INFO - 16:26:15:
INFO - 16:26:15: Optimization result:
INFO - 16:26:15: Optimizer info:
INFO - 16:26:15: Status: None
INFO - 16:26:15: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:26:15: Number of calls to the objective function by the optimizer: 4
INFO - 16:26:15: Solution:
INFO - 16:26:15: The solution is feasible.
INFO - 16:26:15: Objective: 0.9239330847904542
INFO - 16:26:15: Standardized constraints:
INFO - 16:26:15: g_3 = [-7.82503536e-01 -2.17496464e-01 2.22044605e-16 -1.83255000e-01]
INFO - 16:26:15: Design space:
INFO - 16:26:15: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:15: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:15: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:15: | x_3 | 0.1 | 0.1562447456462875 | 1 | float |
INFO - 16:26:15: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:15: *** End PropulsionScenario execution (time: 0:00:00.017668) ***
INFO - 16:26:15:
INFO - 16:26:15: *** Start AerodynamicsScenario execution ***
INFO - 16:26:15: AerodynamicsScenario
INFO - 16:26:15: Disciplines: SobieskiAerodynamics
INFO - 16:26:15: MDO formulation: DisciplinaryOpt
INFO - 16:26:15: Optimization problem:
INFO - 16:26:15: minimize -y_24(x_2)
INFO - 16:26:15: with respect to x_2
INFO - 16:26:15: subject to constraints:
INFO - 16:26:15: g_2(x_2) <= 0.0
INFO - 16:26:15: over the design space:
INFO - 16:26:15: +------+-------------+-------+-------------+-------+
INFO - 16:26:15: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:15: +------+-------------+-------+-------------+-------+
INFO - 16:26:15: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:15: +------+-------------+-------+-------------+-------+
INFO - 16:26:15: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:15: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:15:
INFO - 16:26:15: ... 3%|▎ | 1/30 [00:00<00:00, 974.51 it/sec, obj=-7.04]
INFO - 16:26:15:
INFO - 16:26:15:
INFO - 16:26:15: Optimization result:
INFO - 16:26:15: Optimizer info:
INFO - 16:26:15: Status: 8
INFO - 16:26:15: Message: Positive directional derivative for linesearch
INFO - 16:26:15: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:15: Solution:
INFO - 16:26:15: The solution is feasible.
INFO - 16:26:15: Objective: -7.044725443088093
INFO - 16:26:15: Standardized constraints:
INFO - 16:26:15: g_2 = 6.995037461199338e-05
INFO - 16:26:15: Design space:
INFO - 16:26:15: +------+-------------+-------+-------------+-------+
INFO - 16:26:15: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:15: +------+-------------+-------+-------------+-------+
INFO - 16:26:15: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:15: +------+-------------+-------+-------------+-------+
INFO - 16:26:15: *** End AerodynamicsScenario execution (time: 0:00:00.013729) ***
INFO - 16:26:15:
INFO - 16:26:15: *** Start StructureScenario execution ***
INFO - 16:26:15: StructureScenario
INFO - 16:26:15: Disciplines: SobieskiStructure
INFO - 16:26:15: MDO formulation: DisciplinaryOpt
INFO - 16:26:15: Optimization problem:
INFO - 16:26:15: minimize -y_11(x_1)
INFO - 16:26:15: with respect to x_1
INFO - 16:26:15: subject to constraints:
INFO - 16:26:15: g_1(x_1) <= 0.0
INFO - 16:26:15: over the design space:
INFO - 16:26:15: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:15: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:15: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:15: | x_1[0] | 0.1 | 0.2397559337642204 | 0.4 | float |
INFO - 16:26:15: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:15: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:15: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:15: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:15:
INFO - 16:26:15: ... 3%|▎ | 1/30 [00:00<00:00, 581.09 it/sec, obj=-.485]
INFO - 16:26:15:
INFO - 16:26:15: ... 7%|▋ | 2/30 [00:00<00:00, 258.03 it/sec, obj=-.484]
INFO - 16:26:15:
INFO - 16:26:15: ... 10%|█ | 3/30 [00:00<00:00, 233.72 it/sec, obj=-.484]
INFO - 16:26:15:
INFO - 16:26:15: ... 13%|█▎ | 4/30 [00:00<00:00, 215.80 it/sec, obj=-.484]
INFO - 16:26:15:
INFO - 16:26:15: ... 17%|█▋ | 5/30 [00:00<00:00, 207.65 it/sec, obj=-.484]
INFO - 16:26:15:
INFO - 16:26:15:
INFO - 16:26:15: Optimization result:
INFO - 16:26:15: Optimizer info:
INFO - 16:26:15: Status: None
INFO - 16:26:15: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:26:15: Number of calls to the objective function by the optimizer: 6
INFO - 16:26:15: Solution:
INFO - 16:26:15: The solution is feasible.
INFO - 16:26:15: Objective: -0.48420707024244863
INFO - 16:26:15: Standardized constraints:
INFO - 16:26:15: g_1 = [-1.23112631e-11 -9.47511747e-03 -2.19095072e-02 -3.18331269e-02
INFO - 16:26:15: -3.94751175e-02 -1.92858383e-01 -4.71416173e-02]
INFO - 16:26:15: Design space:
INFO - 16:26:15: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:15: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:15: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:15: | x_1[0] | 0.1 | 0.1807065559449947 | 0.4 | float |
INFO - 16:26:15: | x_1[1] | 0.75 | 0.7500000000000004 | 1.25 | float |
INFO - 16:26:15: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:15: *** End StructureScenario execution (time: 0:00:00.035977) ***
INFO - 16:26:15: ... 54%|█████▍ | 27/50 [00:07<00:06, 3.54 it/sec, obj=-2.97e+3]
INFO - 16:26:15:
INFO - 16:26:15: *** Start PropulsionScenario execution ***
INFO - 16:26:15: PropulsionScenario
INFO - 16:26:15: Disciplines: SobieskiPropulsion
INFO - 16:26:15: MDO formulation: DisciplinaryOpt
INFO - 16:26:15: Optimization problem:
INFO - 16:26:15: minimize y_34(x_3)
INFO - 16:26:15: with respect to x_3
INFO - 16:26:15: subject to constraints:
INFO - 16:26:15: g_3(x_3) <= 0.0
INFO - 16:26:15: over the design space:
INFO - 16:26:15: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:15: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:15: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:15: | x_3 | 0.1 | 0.1562447456462875 | 1 | float |
INFO - 16:26:15: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:15: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:15: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:15:
INFO - 16:26:15: ... 3%|▎ | 1/30 [00:00<00:00, 1832.37 it/sec, obj=0.924]
INFO - 16:26:15:
INFO - 16:26:15: ... 7%|▋ | 2/30 [00:00<00:00, 462.82 it/sec, obj=0.924]
INFO - 16:26:15:
INFO - 16:26:15: ... 10%|█ | 3/30 [00:00<00:00, 367.36 it/sec, obj=0.924]
INFO - 16:26:15:
INFO - 16:26:15: ... 13%|█▎ | 4/30 [00:00<00:00, 393.75 it/sec, obj=0.924]
INFO - 16:26:15:
INFO - 16:26:15:
INFO - 16:26:15: Optimization result:
INFO - 16:26:15: Optimizer info:
INFO - 16:26:15: Status: None
INFO - 16:26:15: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:26:15: Number of calls to the objective function by the optimizer: 5
INFO - 16:26:15: Solution:
INFO - 16:26:15: The solution is feasible.
INFO - 16:26:15: Objective: 0.9240946213762717
INFO - 16:26:15: Standardized constraints:
INFO - 16:26:15: g_3 = [-7.84163958e-01 -2.15836042e-01 2.22044605e-16 -1.83246104e-01]
INFO - 16:26:15: Design space:
INFO - 16:26:15: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:15: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:15: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:15: | x_3 | 0.1 | 0.1562865684320876 | 1 | float |
INFO - 16:26:15: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:15: *** End PropulsionScenario execution (time: 0:00:00.021997) ***
INFO - 16:26:15:
INFO - 16:26:15: *** Start AerodynamicsScenario execution ***
INFO - 16:26:15: AerodynamicsScenario
INFO - 16:26:15: Disciplines: SobieskiAerodynamics
INFO - 16:26:15: MDO formulation: DisciplinaryOpt
INFO - 16:26:15: Optimization problem:
INFO - 16:26:15: minimize -y_24(x_2)
INFO - 16:26:15: with respect to x_2
INFO - 16:26:15: subject to constraints:
INFO - 16:26:15: g_2(x_2) <= 0.0
INFO - 16:26:15: over the design space:
INFO - 16:26:15: +------+-------------+-------+-------------+-------+
INFO - 16:26:15: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:15: +------+-------------+-------+-------------+-------+
INFO - 16:26:15: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:15: +------+-------------+-------+-------------+-------+
INFO - 16:26:15: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:15: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:15:
INFO - 16:26:15: ... 3%|▎ | 1/30 [00:00<00:00, 976.33 it/sec, obj=-6.88]
INFO - 16:26:15:
INFO - 16:26:15:
INFO - 16:26:15: Optimization result:
INFO - 16:26:15: Optimizer info:
INFO - 16:26:15: Status: 8
INFO - 16:26:15: Message: Positive directional derivative for linesearch
INFO - 16:26:15: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:15: Solution:
INFO - 16:26:15: The solution is feasible.
INFO - 16:26:15: Objective: -6.883408252723236
INFO - 16:26:15: Standardized constraints:
INFO - 16:26:15: g_2 = -0.013052356904824203
INFO - 16:26:15: Design space:
INFO - 16:26:15: +------+-------------+-------+-------------+-------+
INFO - 16:26:15: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:15: +------+-------------+-------+-------------+-------+
INFO - 16:26:15: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:15: +------+-------------+-------+-------------+-------+
INFO - 16:26:15: *** End AerodynamicsScenario execution (time: 0:00:00.014820) ***
INFO - 16:26:15:
INFO - 16:26:15: *** Start StructureScenario execution ***
INFO - 16:26:15: StructureScenario
INFO - 16:26:15: Disciplines: SobieskiStructure
INFO - 16:26:15: MDO formulation: DisciplinaryOpt
INFO - 16:26:15: Optimization problem:
INFO - 16:26:15: minimize -y_11(x_1)
INFO - 16:26:15: with respect to x_1
INFO - 16:26:15: subject to constraints:
INFO - 16:26:15: g_1(x_1) <= 0.0
INFO - 16:26:15: over the design space:
INFO - 16:26:15: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:15: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:15: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:15: | x_1[0] | 0.1 | 0.1807065559449947 | 0.4 | float |
INFO - 16:26:15: | x_1[1] | 0.75 | 0.7500000000000004 | 1.25 | float |
INFO - 16:26:15: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:15: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:15: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:15:
INFO - 16:26:15: ... 3%|▎ | 1/30 [00:00<00:00, 585.71 it/sec, obj=-.469]
INFO - 16:26:15:
INFO - 16:26:15: ... 7%|▋ | 2/30 [00:00<00:00, 258.51 it/sec, obj=-.309]
INFO - 16:26:15:
INFO - 16:26:15: ... 10%|█ | 3/30 [00:00<00:00, 234.18 it/sec, obj=-.333]
INFO - 16:26:15:
INFO - 16:26:15: ... 13%|█▎ | 4/30 [00:00<00:00, 216.33 it/sec, obj=-.334]
INFO - 16:26:15:
INFO - 16:26:15: ... 17%|█▋ | 5/30 [00:00<00:00, 207.15 it/sec, obj=-.334]
INFO - 16:26:15:
INFO - 16:26:15: ... 20%|██ | 6/30 [00:00<00:00, 201.82 it/sec, obj=-.334]
INFO - 16:26:15:
INFO - 16:26:15: ... 23%|██▎ | 7/30 [00:00<00:00, 214.97 it/sec, obj=-.334]
INFO - 16:26:15:
INFO - 16:26:15:
INFO - 16:26:15: Optimization result:
INFO - 16:26:15: Optimizer info:
INFO - 16:26:15: Status: None
INFO - 16:26:15: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:26:15: Number of calls to the objective function by the optimizer: 8
INFO - 16:26:15: Solution:
INFO - 16:26:15: The solution is feasible.
INFO - 16:26:15: Objective: -0.33361180636825594
INFO - 16:26:15: Standardized constraints:
INFO - 16:26:15: g_1 = [ 6.05563932e-08 -1.66470557e-02 -2.99779528e-02 -3.95788396e-02
INFO - 16:26:15: -4.66470759e-02 -1.57862371e-01 -8.21376287e-02]
INFO - 16:26:15: Design space:
INFO - 16:26:15: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:15: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:15: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:15: | x_1[0] | 0.1 | 0.1000000004117876 | 0.4 | float |
INFO - 16:26:15: | x_1[1] | 0.75 | 0.8493136145040372 | 1.25 | float |
INFO - 16:26:15: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:15: *** End StructureScenario execution (time: 0:00:00.044374) ***
INFO - 16:26:15: ... 56%|█████▌ | 28/50 [00:07<00:06, 3.57 it/sec, obj=-2.63e+3]
INFO - 16:26:16:
INFO - 16:26:16: *** Start PropulsionScenario execution ***
INFO - 16:26:16: PropulsionScenario
INFO - 16:26:16: Disciplines: SobieskiPropulsion
INFO - 16:26:16: MDO formulation: DisciplinaryOpt
INFO - 16:26:16: Optimization problem:
INFO - 16:26:16: minimize y_34(x_3)
INFO - 16:26:16: with respect to x_3
INFO - 16:26:16: subject to constraints:
INFO - 16:26:16: g_3(x_3) <= 0.0
INFO - 16:26:16: over the design space:
INFO - 16:26:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:16: | x_3 | 0.1 | 0.1562865684320876 | 1 | float |
INFO - 16:26:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:16: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:16: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:16:
INFO - 16:26:16: ... 3%|▎ | 1/30 [00:00<00:00, 1811.01 it/sec, obj=0.924]
INFO - 16:26:16:
INFO - 16:26:16: ... 7%|▋ | 2/30 [00:00<00:00, 462.03 it/sec, obj=0.924]
INFO - 16:26:16:
INFO - 16:26:16: ... 10%|█ | 3/30 [00:00<00:00, 515.00 it/sec, obj=0.924]
INFO - 16:26:16:
INFO - 16:26:16: ... 13%|█▎ | 4/30 [00:00<00:00, 441.19 it/sec, obj=0.924]
INFO - 16:26:16:
INFO - 16:26:16: ... 17%|█▋ | 5/30 [00:00<00:00, 406.81 it/sec, obj=0.924]
INFO - 16:26:16:
INFO - 16:26:16: ... 20%|██ | 6/30 [00:00<00:00, 385.14 it/sec, obj=0.924]
INFO - 16:26:16:
INFO - 16:26:16:
INFO - 16:26:16: Optimization result:
INFO - 16:26:16: Optimizer info:
INFO - 16:26:16: Status: None
INFO - 16:26:16: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:26:16: Number of calls to the objective function by the optimizer: 9
INFO - 16:26:16: Solution:
INFO - 16:26:16: The solution is feasible.
INFO - 16:26:16: Objective: 0.9239330847904542
INFO - 16:26:16: Standardized constraints:
INFO - 16:26:16: g_3 = [-7.88206775e-01 -2.11793225e-01 2.22044605e-16 -1.83255000e-01]
INFO - 16:26:16: Design space:
INFO - 16:26:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:16: | x_3 | 0.1 | 0.1562447456462875 | 1 | float |
INFO - 16:26:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:16: *** End PropulsionScenario execution (time: 0:00:00.027482) ***
INFO - 16:26:16:
INFO - 16:26:16: *** Start AerodynamicsScenario execution ***
INFO - 16:26:16: AerodynamicsScenario
INFO - 16:26:16: Disciplines: SobieskiAerodynamics
INFO - 16:26:16: MDO formulation: DisciplinaryOpt
INFO - 16:26:16: Optimization problem:
INFO - 16:26:16: minimize -y_24(x_2)
INFO - 16:26:16: with respect to x_2
INFO - 16:26:16: subject to constraints:
INFO - 16:26:16: g_2(x_2) <= 0.0
INFO - 16:26:16: over the design space:
INFO - 16:26:16: +------+-------------+-------+-------------+-------+
INFO - 16:26:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:16: +------+-------------+-------+-------------+-------+
INFO - 16:26:16: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:16: +------+-------------+-------+-------------+-------+
INFO - 16:26:16: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:16: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:16:
INFO - 16:26:16: ... 3%|▎ | 1/30 [00:00<00:00, 946.15 it/sec, obj=-9.26]
INFO - 16:26:16:
INFO - 16:26:16:
INFO - 16:26:16: Optimization result:
INFO - 16:26:16: Optimizer info:
INFO - 16:26:16: Status: 8
INFO - 16:26:16: Message: Positive directional derivative for linesearch
INFO - 16:26:16: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:16: Solution:
INFO - 16:26:16: The solution is feasible.
INFO - 16:26:16: Objective: -9.263523593265333
INFO - 16:26:16: Standardized constraints:
INFO - 16:26:16: g_2 = -0.002130586851032623
INFO - 16:26:16: Design space:
INFO - 16:26:16: +------+-------------+-------+-------------+-------+
INFO - 16:26:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:16: +------+-------------+-------+-------------+-------+
INFO - 16:26:16: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:16: +------+-------------+-------+-------------+-------+
INFO - 16:26:16: *** End AerodynamicsScenario execution (time: 0:00:00.014713) ***
INFO - 16:26:16:
INFO - 16:26:16: *** Start StructureScenario execution ***
INFO - 16:26:16: StructureScenario
INFO - 16:26:16: Disciplines: SobieskiStructure
INFO - 16:26:16: MDO formulation: DisciplinaryOpt
INFO - 16:26:16: Optimization problem:
INFO - 16:26:16: minimize -y_11(x_1)
INFO - 16:26:16: with respect to x_1
INFO - 16:26:16: subject to constraints:
INFO - 16:26:16: g_1(x_1) <= 0.0
INFO - 16:26:16: over the design space:
INFO - 16:26:16: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:16: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:16: | x_1[0] | 0.1 | 0.1000000004117876 | 0.4 | float |
INFO - 16:26:16: | x_1[1] | 0.75 | 0.8493136145040372 | 1.25 | float |
INFO - 16:26:16: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:16: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:16: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:16:
INFO - 16:26:16: ... 3%|▎ | 1/30 [00:00<00:00, 581.65 it/sec, obj=-.344]
INFO - 16:26:16:
INFO - 16:26:16: ... 7%|▋ | 2/30 [00:00<00:00, 258.50 it/sec, obj=-.507]
INFO - 16:26:16:
INFO - 16:26:16: ... 10%|█ | 3/30 [00:00<00:00, 234.55 it/sec, obj=-.509]
INFO - 16:26:16:
INFO - 16:26:16: ... 13%|█▎ | 4/30 [00:00<00:00, 217.32 it/sec, obj=-.509]
INFO - 16:26:16:
INFO - 16:26:16: ... 17%|█▋ | 5/30 [00:00<00:00, 208.56 it/sec, obj=-.509]
INFO - 16:26:16:
INFO - 16:26:16: ... 20%|██ | 6/30 [00:00<00:00, 202.15 it/sec, obj=-.509]
INFO - 16:26:16:
INFO - 16:26:16: ... 23%|██▎ | 7/30 [00:00<00:00, 198.63 it/sec, obj=-.509]
INFO - 16:26:16:
INFO - 16:26:16: ... 27%|██▋ | 8/30 [00:00<00:00, 194.46 it/sec, obj=-.509]
INFO - 16:26:16:
INFO - 16:26:16: ... 30%|███ | 9/30 [00:00<00:00, 192.75 it/sec, obj=-.509]
INFO - 16:26:16:
INFO - 16:26:16:
INFO - 16:26:16: Optimization result:
INFO - 16:26:16: Optimizer info:
INFO - 16:26:16: Status: None
INFO - 16:26:16: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:26:16: Number of calls to the objective function by the optimizer: 10
INFO - 16:26:16: Solution:
INFO - 16:26:16: The solution is feasible.
INFO - 16:26:16: Objective: -0.5093275786631818
INFO - 16:26:16: Standardized constraints:
INFO - 16:26:16: g_1 = [-1.57052149e-12 -1.09196240e-02 -2.35345770e-02 -3.33931939e-02
INFO - 16:26:16: -4.09196240e-02 -1.80497510e-01 -5.95024903e-02]
INFO - 16:26:16: Design space:
INFO - 16:26:16: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:16: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:16: | x_1[0] | 0.1 | 0.1393268851606898 | 0.4 | float |
INFO - 16:26:16: | x_1[1] | 0.75 | 0.7500000000001696 | 1.25 | float |
INFO - 16:26:16: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:16: *** End StructureScenario execution (time: 0:00:00.058629) ***
INFO - 16:26:16: ... 58%|█████▊ | 29/50 [00:08<00:05, 3.59 it/sec, obj=-2.95e+3]
INFO - 16:26:16:
INFO - 16:26:16: *** Start PropulsionScenario execution ***
INFO - 16:26:16: PropulsionScenario
INFO - 16:26:16: Disciplines: SobieskiPropulsion
INFO - 16:26:16: MDO formulation: DisciplinaryOpt
INFO - 16:26:16: Optimization problem:
INFO - 16:26:16: minimize y_34(x_3)
INFO - 16:26:16: with respect to x_3
INFO - 16:26:16: subject to constraints:
INFO - 16:26:16: g_3(x_3) <= 0.0
INFO - 16:26:16: over the design space:
INFO - 16:26:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:16: | x_3 | 0.1 | 0.1562447456462875 | 1 | float |
INFO - 16:26:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:16: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:16: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:16:
INFO - 16:26:16: ... 3%|▎ | 1/30 [00:00<00:00, 1771.99 it/sec, obj=0.924]
INFO - 16:26:16:
INFO - 16:26:16: ... 7%|▋ | 2/30 [00:00<00:00, 461.85 it/sec, obj=0.924]
INFO - 16:26:16:
INFO - 16:26:16: ... 10%|█ | 3/30 [00:00<00:00, 516.54 it/sec, obj=0.924]
INFO - 16:26:16:
INFO - 16:26:16:
INFO - 16:26:16: Optimization result:
INFO - 16:26:16: Optimizer info:
INFO - 16:26:16: Status: None
INFO - 16:26:16: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:26:16: Number of calls to the objective function by the optimizer: 4
INFO - 16:26:16: Solution:
INFO - 16:26:16: The solution is feasible.
INFO - 16:26:16: Objective: 0.9239330847904542
INFO - 16:26:16: Standardized constraints:
INFO - 16:26:16: g_3 = [-8.03939727e-01 -1.96060273e-01 2.22044605e-16 -1.83255000e-01]
INFO - 16:26:16: Design space:
INFO - 16:26:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:16: | x_3 | 0.1 | 0.1562447456462875 | 1 | float |
INFO - 16:26:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:16: *** End PropulsionScenario execution (time: 0:00:00.017675) ***
INFO - 16:26:16:
INFO - 16:26:16: *** Start AerodynamicsScenario execution ***
INFO - 16:26:16: AerodynamicsScenario
INFO - 16:26:16: Disciplines: SobieskiAerodynamics
INFO - 16:26:16: MDO formulation: DisciplinaryOpt
INFO - 16:26:16: Optimization problem:
INFO - 16:26:16: minimize -y_24(x_2)
INFO - 16:26:16: with respect to x_2
INFO - 16:26:16: subject to constraints:
INFO - 16:26:16: g_2(x_2) <= 0.0
INFO - 16:26:16: over the design space:
INFO - 16:26:16: +------+-------------+-------+-------------+-------+
INFO - 16:26:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:16: +------+-------------+-------+-------------+-------+
INFO - 16:26:16: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:16: +------+-------------+-------+-------------+-------+
INFO - 16:26:16: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:16: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:16:
INFO - 16:26:16: ... 3%|▎ | 1/30 [00:00<00:00, 917.79 it/sec, obj=-7.31]
INFO - 16:26:16:
INFO - 16:26:16:
INFO - 16:26:16: Optimization result:
INFO - 16:26:16: Optimizer info:
INFO - 16:26:16: Status: 8
INFO - 16:26:16: Message: Positive directional derivative for linesearch
INFO - 16:26:16: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:16: Solution:
INFO - 16:26:16: The solution is feasible.
INFO - 16:26:16: Objective: -7.311496011200439
INFO - 16:26:16: Standardized constraints:
INFO - 16:26:16: g_2 = 2.220446049250313e-16
INFO - 16:26:16: Design space:
INFO - 16:26:16: +------+-------------+-------+-------------+-------+
INFO - 16:26:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:16: +------+-------------+-------+-------------+-------+
INFO - 16:26:16: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:16: +------+-------------+-------+-------------+-------+
INFO - 16:26:16: *** End AerodynamicsScenario execution (time: 0:00:00.020319) ***
INFO - 16:26:16:
INFO - 16:26:16: *** Start StructureScenario execution ***
INFO - 16:26:16: StructureScenario
INFO - 16:26:16: Disciplines: SobieskiStructure
INFO - 16:26:16: MDO formulation: DisciplinaryOpt
INFO - 16:26:16: Optimization problem:
INFO - 16:26:16: minimize -y_11(x_1)
INFO - 16:26:16: with respect to x_1
INFO - 16:26:16: subject to constraints:
INFO - 16:26:16: g_1(x_1) <= 0.0
INFO - 16:26:16: over the design space:
INFO - 16:26:16: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:16: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:16: | x_1[0] | 0.1 | 0.1393268851606898 | 0.4 | float |
INFO - 16:26:16: | x_1[1] | 0.75 | 0.7500000000001696 | 1.25 | float |
INFO - 16:26:16: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:16: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:16: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:16:
INFO - 16:26:16: ... 3%|▎ | 1/30 [00:00<00:00, 575.19 it/sec, obj=-.476]
INFO - 16:26:16:
INFO - 16:26:16: ... 7%|▋ | 2/30 [00:00<00:00, 254.27 it/sec, obj=-.476]
INFO - 16:26:16:
INFO - 16:26:16: ... 10%|█ | 3/30 [00:00<00:00, 231.96 it/sec, obj=-.476]
INFO - 16:26:16:
INFO - 16:26:16: ... 13%|█▎ | 4/30 [00:00<00:00, 215.81 it/sec, obj=-.477]
INFO - 16:26:16:
INFO - 16:26:16: ... 17%|█▋ | 5/30 [00:00<00:00, 207.11 it/sec, obj=-.478]
INFO - 16:26:16:
INFO - 16:26:16: ... 20%|██ | 6/30 [00:00<00:00, 202.20 it/sec, obj=-.478]
INFO - 16:26:16:
INFO - 16:26:16: ... 23%|██▎ | 7/30 [00:00<00:00, 196.70 it/sec, obj=-.478]
INFO - 16:26:16:
INFO - 16:26:16: ... 27%|██▋ | 8/30 [00:00<00:00, 194.51 it/sec, obj=-.478]
INFO - 16:26:16:
INFO - 16:26:16:
INFO - 16:26:16: Optimization result:
INFO - 16:26:16: Optimizer info:
INFO - 16:26:16: Status: None
INFO - 16:26:16: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:26:16: Number of calls to the objective function by the optimizer: 9
INFO - 16:26:16: Solution:
INFO - 16:26:16: The solution is feasible.
INFO - 16:26:16: Objective: -0.47765429843791496
INFO - 16:26:16: Standardized constraints:
INFO - 16:26:16: g_1 = [-7.56772423e-12 -1.19483499e-02 -2.46918937e-02 -3.45042179e-02
INFO - 16:26:16: -4.19483499e-02 -1.82864212e-01 -5.71357885e-02]
INFO - 16:26:16: Design space:
INFO - 16:26:16: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:16: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:16: | x_1[0] | 0.1 | 0.2363630995072858 | 0.4 | float |
INFO - 16:26:16: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:16: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:16: *** End StructureScenario execution (time: 0:00:00.053319) ***
INFO - 16:26:16: ... 60%|██████ | 30/50 [00:08<00:05, 3.62 it/sec, obj=-3.03e+3]
INFO - 16:26:16:
INFO - 16:26:16: *** Start PropulsionScenario execution ***
INFO - 16:26:16: PropulsionScenario
INFO - 16:26:16: Disciplines: SobieskiPropulsion
INFO - 16:26:16: MDO formulation: DisciplinaryOpt
INFO - 16:26:16: Optimization problem:
INFO - 16:26:16: minimize y_34(x_3)
INFO - 16:26:16: with respect to x_3
INFO - 16:26:16: subject to constraints:
INFO - 16:26:16: g_3(x_3) <= 0.0
INFO - 16:26:16: over the design space:
INFO - 16:26:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:16: | x_3 | 0.1 | 0.1562447456462875 | 1 | float |
INFO - 16:26:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:16: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:16: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:16:
INFO - 16:26:16: ... 3%|▎ | 1/30 [00:00<00:00, 1771.99 it/sec, obj=0.924]
INFO - 16:26:16:
INFO - 16:26:16: ... 7%|▋ | 2/30 [00:00<00:00, 457.14 it/sec, obj=0.924]
INFO - 16:26:16:
INFO - 16:26:16: ... 10%|█ | 3/30 [00:00<00:00, 510.71 it/sec, obj=0.924]
INFO - 16:26:16:
INFO - 16:26:16:
INFO - 16:26:16: Optimization result:
INFO - 16:26:16: Optimizer info:
INFO - 16:26:16: Status: None
INFO - 16:26:16: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:26:16: Number of calls to the objective function by the optimizer: 4
INFO - 16:26:16: Solution:
INFO - 16:26:16: The solution is feasible.
INFO - 16:26:16: Objective: 0.9239330847904542
INFO - 16:26:16: Standardized constraints:
INFO - 16:26:16: g_3 = [-8.24012640e-01 -1.75987360e-01 2.22044605e-16 -1.83255000e-01]
INFO - 16:26:16: Design space:
INFO - 16:26:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:16: | x_3 | 0.1 | 0.1562447456462875 | 1 | float |
INFO - 16:26:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:16: *** End PropulsionScenario execution (time: 0:00:00.018011) ***
INFO - 16:26:16:
INFO - 16:26:16: *** Start AerodynamicsScenario execution ***
INFO - 16:26:16: AerodynamicsScenario
INFO - 16:26:16: Disciplines: SobieskiAerodynamics
INFO - 16:26:16: MDO formulation: DisciplinaryOpt
INFO - 16:26:16: Optimization problem:
INFO - 16:26:16: minimize -y_24(x_2)
INFO - 16:26:16: with respect to x_2
INFO - 16:26:16: subject to constraints:
INFO - 16:26:16: g_2(x_2) <= 0.0
INFO - 16:26:16: over the design space:
INFO - 16:26:16: +------+-------------+-------+-------------+-------+
INFO - 16:26:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:16: +------+-------------+-------+-------------+-------+
INFO - 16:26:16: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:16: +------+-------------+-------+-------------+-------+
INFO - 16:26:16: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:16: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:16:
INFO - 16:26:16: ... 3%|▎ | 1/30 [00:00<00:00, 962.00 it/sec, obj=-7.55]
INFO - 16:26:16:
INFO - 16:26:16:
INFO - 16:26:16: Optimization result:
INFO - 16:26:16: Optimizer info:
INFO - 16:26:16: Status: 8
INFO - 16:26:16: Message: Positive directional derivative for linesearch
INFO - 16:26:16: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:16: Solution:
INFO - 16:26:16: The solution is feasible.
INFO - 16:26:16: Objective: -7.548308548035953
INFO - 16:26:16: Standardized constraints:
INFO - 16:26:16: g_2 = 0.0
INFO - 16:26:16: Design space:
INFO - 16:26:16: +------+-------------+-------+-------------+-------+
INFO - 16:26:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:16: +------+-------------+-------+-------------+-------+
INFO - 16:26:16: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:16: +------+-------------+-------+-------------+-------+
INFO - 16:26:16: *** End AerodynamicsScenario execution (time: 0:00:00.015028) ***
INFO - 16:26:16:
INFO - 16:26:16: *** Start StructureScenario execution ***
INFO - 16:26:16: StructureScenario
INFO - 16:26:16: Disciplines: SobieskiStructure
INFO - 16:26:16: MDO formulation: DisciplinaryOpt
INFO - 16:26:16: Optimization problem:
INFO - 16:26:16: minimize -y_11(x_1)
INFO - 16:26:16: with respect to x_1
INFO - 16:26:16: subject to constraints:
INFO - 16:26:16: g_1(x_1) <= 0.0
INFO - 16:26:16: over the design space:
INFO - 16:26:16: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:16: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:16: | x_1[0] | 0.1 | 0.2363630995072858 | 0.4 | float |
INFO - 16:26:16: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:16: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:16: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:16: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:16:
INFO - 16:26:16: ... 3%|▎ | 1/30 [00:00<00:00, 595.11 it/sec, obj=-.471]
INFO - 16:26:16:
INFO - 16:26:16: ... 7%|▋ | 2/30 [00:00<00:00, 256.82 it/sec, obj=-.471]
INFO - 16:26:16:
INFO - 16:26:16: ... 10%|█ | 3/30 [00:00<00:00, 234.07 it/sec, obj=-.471]
INFO - 16:26:16:
INFO - 16:26:16: ... 13%|█▎ | 4/30 [00:00<00:00, 217.20 it/sec, obj=-.471]
INFO - 16:26:16:
INFO - 16:26:16: ... 17%|█▋ | 5/30 [00:00<00:00, 205.91 it/sec, obj=-.471]
INFO - 16:26:16:
INFO - 16:26:16: ... 20%|██ | 6/30 [00:00<00:00, 201.07 it/sec, obj=-.471]
INFO - 16:26:16:
INFO - 16:26:16: ... 23%|██▎ | 7/30 [00:00<00:00, 197.83 it/sec, obj=-.471]
INFO - 16:26:16:
INFO - 16:26:16: ... 27%|██▋ | 8/30 [00:00<00:00, 195.50 it/sec, obj=-.471]
INFO - 16:26:16:
INFO - 16:26:16:
INFO - 16:26:16: Optimization result:
INFO - 16:26:16: Optimizer info:
INFO - 16:26:16: Status: None
INFO - 16:26:16: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:26:16: Number of calls to the objective function by the optimizer: 9
INFO - 16:26:16: Solution:
INFO - 16:26:16: The solution is feasible.
INFO - 16:26:16: Objective: -0.4712841902706233
INFO - 16:26:16: Standardized constraints:
INFO - 16:26:16: g_1 = [-4.44089210e-16 -1.42058825e-02 -2.72316178e-02 -3.69423531e-02
INFO - 16:26:16: -4.42058825e-02 -1.74575012e-01 -6.54249879e-02]
INFO - 16:26:16: Design space:
INFO - 16:26:16: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:16: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:16: | x_1[0] | 0.1 | 0.2946799196810532 | 0.4 | float |
INFO - 16:26:16: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:16: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:16: *** End StructureScenario execution (time: 0:00:00.052862) ***
INFO - 16:26:16: ... 62%|██████▏ | 31/50 [00:08<00:05, 3.64 it/sec, obj=-3.09e+3]
INFO - 16:26:16:
INFO - 16:26:16: *** Start PropulsionScenario execution ***
INFO - 16:26:16: PropulsionScenario
INFO - 16:26:16: Disciplines: SobieskiPropulsion
INFO - 16:26:16: MDO formulation: DisciplinaryOpt
INFO - 16:26:16: Optimization problem:
INFO - 16:26:16: minimize y_34(x_3)
INFO - 16:26:16: with respect to x_3
INFO - 16:26:16: subject to constraints:
INFO - 16:26:16: g_3(x_3) <= 0.0
INFO - 16:26:16: over the design space:
INFO - 16:26:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:16: | x_3 | 0.1 | 0.1562447456462875 | 1 | float |
INFO - 16:26:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:16: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:16: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:16:
INFO - 16:26:16: ... 3%|▎ | 1/30 [00:00<00:00, 1048.84 it/sec, obj=0.924]
INFO - 16:26:16:
INFO - 16:26:16: ... 7%|▋ | 2/30 [00:00<00:00, 417.86 it/sec, obj=0.924]
INFO - 16:26:16:
INFO - 16:26:16: ... 10%|█ | 3/30 [00:00<00:00, 476.75 it/sec, obj=0.924]
INFO - 16:26:16:
INFO - 16:26:16:
INFO - 16:26:16: Optimization result:
INFO - 16:26:16: Optimizer info:
INFO - 16:26:16: Status: None
INFO - 16:26:16: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:26:16: Number of calls to the objective function by the optimizer: 4
INFO - 16:26:16: Solution:
INFO - 16:26:16: The solution is feasible.
INFO - 16:26:16: Objective: 0.9239330847904542
INFO - 16:26:16: Standardized constraints:
INFO - 16:26:16: g_3 = [-8.46154675e-01 -1.53845325e-01 2.22044605e-16 -1.83255000e-01]
INFO - 16:26:16: Design space:
INFO - 16:26:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:16: | x_3 | 0.1 | 0.1562447456462875 | 1 | float |
INFO - 16:26:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:16: *** End PropulsionScenario execution (time: 0:00:00.018122) ***
INFO - 16:26:16:
INFO - 16:26:16: *** Start AerodynamicsScenario execution ***
INFO - 16:26:16: AerodynamicsScenario
INFO - 16:26:16: Disciplines: SobieskiAerodynamics
INFO - 16:26:16: MDO formulation: DisciplinaryOpt
INFO - 16:26:16: Optimization problem:
INFO - 16:26:16: minimize -y_24(x_2)
INFO - 16:26:16: with respect to x_2
INFO - 16:26:16: subject to constraints:
INFO - 16:26:16: g_2(x_2) <= 0.0
INFO - 16:26:16: over the design space:
INFO - 16:26:16: +------+-------------+-------+-------------+-------+
INFO - 16:26:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:16: +------+-------------+-------+-------------+-------+
INFO - 16:26:16: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:16: +------+-------------+-------+-------------+-------+
INFO - 16:26:16: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:16: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:16:
INFO - 16:26:16: ... 3%|▎ | 1/30 [00:00<00:00, 1758.62 it/sec, obj=-7.81]
INFO - 16:26:16:
INFO - 16:26:16:
INFO - 16:26:16: Optimization result:
INFO - 16:26:16: Optimizer info:
INFO - 16:26:16: Status: 8
INFO - 16:26:16: Message: Positive directional derivative for linesearch
INFO - 16:26:16: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:16: Solution:
INFO - 16:26:16: The solution is feasible.
INFO - 16:26:16: Objective: -7.810407387949793
INFO - 16:26:16: Standardized constraints:
INFO - 16:26:16: g_2 = 0.0
INFO - 16:26:16: Design space:
INFO - 16:26:16: +------+-------------+-------+-------------+-------+
INFO - 16:26:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:16: +------+-------------+-------+-------------+-------+
INFO - 16:26:16: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:16: +------+-------------+-------+-------------+-------+
INFO - 16:26:16: *** End AerodynamicsScenario execution (time: 0:00:00.014681) ***
INFO - 16:26:16:
INFO - 16:26:16: *** Start StructureScenario execution ***
INFO - 16:26:16: StructureScenario
INFO - 16:26:16: Disciplines: SobieskiStructure
INFO - 16:26:16: MDO formulation: DisciplinaryOpt
INFO - 16:26:16: Optimization problem:
INFO - 16:26:16: minimize -y_11(x_1)
INFO - 16:26:16: with respect to x_1
INFO - 16:26:16: subject to constraints:
INFO - 16:26:16: g_1(x_1) <= 0.0
INFO - 16:26:16: over the design space:
INFO - 16:26:16: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:16: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:16: | x_1[0] | 0.1 | 0.2946799196810532 | 0.4 | float |
INFO - 16:26:16: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:16: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:16: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:16: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:16:
INFO - 16:26:16: ... 3%|▎ | 1/30 [00:00<00:00, 1733.18 it/sec, obj=-.463]
INFO - 16:26:16:
INFO - 16:26:16: ... 7%|▋ | 2/30 [00:00<00:00, 294.45 it/sec, obj=-.463]
INFO - 16:26:16:
INFO - 16:26:16: ... 10%|█ | 3/30 [00:00<00:00, 252.13 it/sec, obj=-.463]
INFO - 16:26:16:
INFO - 16:26:16: ... 13%|█▎ | 4/30 [00:00<00:00, 228.96 it/sec, obj=-.463]
INFO - 16:26:16:
INFO - 16:26:16: ... 17%|█▋ | 5/30 [00:00<00:00, 217.03 it/sec, obj=-.463]
INFO - 16:26:16:
INFO - 16:26:16: ... 20%|██ | 6/30 [00:00<00:00, 209.62 it/sec, obj=-.463]
INFO - 16:26:16:
INFO - 16:26:16: ... 23%|██▎ | 7/30 [00:00<00:00, 204.82 it/sec, obj=-.463]
INFO - 16:26:16:
INFO - 16:26:16: ... 27%|██▋ | 8/30 [00:00<00:00, 199.60 it/sec, obj=-.463]
INFO - 16:26:16:
INFO - 16:26:16:
INFO - 16:26:16: Optimization result:
INFO - 16:26:16: Optimizer info:
INFO - 16:26:16: Status: None
INFO - 16:26:16: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:26:16: Number of calls to the objective function by the optimizer: 9
INFO - 16:26:16: Solution:
INFO - 16:26:16: The solution is feasible.
INFO - 16:26:16: Objective: -0.46325618337481167
INFO - 16:26:16: Standardized constraints:
INFO - 16:26:16: g_1 = [-3.48610030e-14 -1.64076712e-02 -2.97086300e-02 -3.93202848e-02
INFO - 16:26:16: -4.64076712e-02 -1.67081488e-01 -7.29185122e-02]
INFO - 16:26:16: Design space:
INFO - 16:26:16: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:16: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:16: | x_1[0] | 0.1 | 0.357111590905473 | 0.4 | float |
INFO - 16:26:16: | x_1[1] | 0.75 | 0.7500000000000001 | 1.25 | float |
INFO - 16:26:16: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:16: *** End StructureScenario execution (time: 0:00:00.052457) ***
INFO - 16:26:16: ... 64%|██████▍ | 32/50 [00:08<00:04, 3.67 it/sec, obj=-3.14e+3]
INFO - 16:26:16:
INFO - 16:26:16: *** Start PropulsionScenario execution ***
INFO - 16:26:16: PropulsionScenario
INFO - 16:26:16: Disciplines: SobieskiPropulsion
INFO - 16:26:16: MDO formulation: DisciplinaryOpt
INFO - 16:26:16: Optimization problem:
INFO - 16:26:16: minimize y_34(x_3)
INFO - 16:26:16: with respect to x_3
INFO - 16:26:16: subject to constraints:
INFO - 16:26:16: g_3(x_3) <= 0.0
INFO - 16:26:16: over the design space:
INFO - 16:26:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:16: | x_3 | 0.1 | 0.1562447456462875 | 1 | float |
INFO - 16:26:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:16: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:16: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:16:
INFO - 16:26:16: ... 3%|▎ | 1/30 [00:00<00:00, 1575.03 it/sec, obj=0.924]
INFO - 16:26:16:
INFO - 16:26:16: ... 7%|▋ | 2/30 [00:00<00:00, 447.46 it/sec, obj=0.924]
INFO - 16:26:16:
INFO - 16:26:16: ... 10%|█ | 3/30 [00:00<00:00, 504.49 it/sec, obj=0.924]
INFO - 16:26:16:
INFO - 16:26:16:
INFO - 16:26:16: Optimization result:
INFO - 16:26:16: Optimizer info:
INFO - 16:26:16: Status: None
INFO - 16:26:16: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:26:16: Number of calls to the objective function by the optimizer: 4
INFO - 16:26:16: Solution:
INFO - 16:26:16: The solution is feasible.
INFO - 16:26:16: Objective: 0.9239330847904542
INFO - 16:26:16: Standardized constraints:
INFO - 16:26:16: g_3 = [-8.69803581e-01 -1.30196419e-01 2.22044605e-16 -1.83255000e-01]
INFO - 16:26:16: Design space:
INFO - 16:26:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:16: | x_3 | 0.1 | 0.1562447456462875 | 1 | float |
INFO - 16:26:16: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:16: *** End PropulsionScenario execution (time: 0:00:00.017871) ***
INFO - 16:26:16:
INFO - 16:26:16: *** Start AerodynamicsScenario execution ***
INFO - 16:26:16: AerodynamicsScenario
INFO - 16:26:16: Disciplines: SobieskiAerodynamics
INFO - 16:26:16: MDO formulation: DisciplinaryOpt
INFO - 16:26:16: Optimization problem:
INFO - 16:26:16: minimize -y_24(x_2)
INFO - 16:26:16: with respect to x_2
INFO - 16:26:16: subject to constraints:
INFO - 16:26:16: g_2(x_2) <= 0.0
INFO - 16:26:16: over the design space:
INFO - 16:26:16: +------+-------------+-------+-------------+-------+
INFO - 16:26:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:16: +------+-------------+-------+-------------+-------+
INFO - 16:26:16: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:16: +------+-------------+-------+-------------+-------+
INFO - 16:26:16: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:16: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:16:
INFO - 16:26:16: ... 3%|▎ | 1/30 [00:00<00:00, 927.53 it/sec, obj=-8.09]
INFO - 16:26:16:
INFO - 16:26:16:
INFO - 16:26:16: Optimization result:
INFO - 16:26:16: Optimizer info:
INFO - 16:26:16: Status: 8
INFO - 16:26:16: Message: Positive directional derivative for linesearch
INFO - 16:26:16: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:16: Solution:
INFO - 16:26:16: The solution is feasible.
INFO - 16:26:16: Objective: -8.091822066324
INFO - 16:26:16: Standardized constraints:
INFO - 16:26:16: g_2 = 2.220446049250313e-16
INFO - 16:26:16: Design space:
INFO - 16:26:16: +------+-------------+-------+-------------+-------+
INFO - 16:26:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:16: +------+-------------+-------+-------------+-------+
INFO - 16:26:16: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:16: +------+-------------+-------+-------------+-------+
INFO - 16:26:16: *** End AerodynamicsScenario execution (time: 0:00:00.014819) ***
INFO - 16:26:16:
INFO - 16:26:16: *** Start StructureScenario execution ***
INFO - 16:26:16: StructureScenario
INFO - 16:26:16: Disciplines: SobieskiStructure
INFO - 16:26:16: MDO formulation: DisciplinaryOpt
INFO - 16:26:16: Optimization problem:
INFO - 16:26:16: minimize -y_11(x_1)
INFO - 16:26:16: with respect to x_1
INFO - 16:26:16: subject to constraints:
INFO - 16:26:16: g_1(x_1) <= 0.0
INFO - 16:26:16: over the design space:
INFO - 16:26:16: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:16: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:16: | x_1[0] | 0.1 | 0.357111590905473 | 0.4 | float |
INFO - 16:26:16: | x_1[1] | 0.75 | 0.7500000000000001 | 1.25 | float |
INFO - 16:26:16: +--------+-------------+--------------------+-------------+-------+
INFO - 16:26:16: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:16: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:16:
INFO - 16:26:16: ... 3%|▎ | 1/30 [00:00<00:00, 572.99 it/sec, obj=-.453]
INFO - 16:26:16:
INFO - 16:26:16: ... 7%|▋ | 2/30 [00:00<00:00, 255.35 it/sec, obj=-.453]
INFO - 16:26:16:
INFO - 16:26:16: ... 10%|█ | 3/30 [00:00<00:00, 233.22 it/sec, obj=-.453]
INFO - 16:26:16:
INFO - 16:26:16: ... 13%|█▎ | 4/30 [00:00<00:00, 215.74 it/sec, obj=-.453]
INFO - 16:26:16:
INFO - 16:26:16: ... 17%|█▋ | 5/30 [00:00<00:00, 206.42 it/sec, obj=-.454]
INFO - 16:26:16:
INFO - 16:26:16:
INFO - 16:26:16: Optimization result:
INFO - 16:26:16: Optimizer info:
INFO - 16:26:16: Status: 8
INFO - 16:26:16: Message: Positive directional derivative for linesearch
INFO - 16:26:16: Number of calls to the objective function by the optimizer: 6
INFO - 16:26:16: Solution:
INFO - 16:26:16: The solution is feasible.
INFO - 16:26:16: Objective: -0.45360460596524715
INFO - 16:26:16: Standardized constraints:
INFO - 16:26:16: g_1 = [-0.00443255 -0.02162062 -0.03446506 -0.04353185 -0.0501431 -0.15621386
INFO - 16:26:16: -0.08378614]
INFO - 16:26:16: Design space:
INFO - 16:26:16: +--------+-------------+-------+-------------+-------+
INFO - 16:26:16: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:16: +--------+-------------+-------+-------------+-------+
INFO - 16:26:16: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:26:16: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:16: +--------+-------------+-------+-------------+-------+
INFO - 16:26:16: *** End StructureScenario execution (time: 0:00:00.039692) ***
INFO - 16:26:17: ... 66%|██████▌ | 33/50 [00:08<00:04, 3.69 it/sec, obj=-3.19e+3]
INFO - 16:26:17:
INFO - 16:26:17: *** Start PropulsionScenario execution ***
INFO - 16:26:17: PropulsionScenario
INFO - 16:26:17: Disciplines: SobieskiPropulsion
INFO - 16:26:17: MDO formulation: DisciplinaryOpt
INFO - 16:26:17: Optimization problem:
INFO - 16:26:17: minimize y_34(x_3)
INFO - 16:26:17: with respect to x_3
INFO - 16:26:17: subject to constraints:
INFO - 16:26:17: g_3(x_3) <= 0.0
INFO - 16:26:17: over the design space:
INFO - 16:26:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:17: | x_3 | 0.1 | 0.1562447456462875 | 1 | float |
INFO - 16:26:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:17: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:17: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:17:
INFO - 16:26:17: ... 3%|▎ | 1/30 [00:00<00:00, 1724.63 it/sec, obj=0.924]
INFO - 16:26:17:
INFO - 16:26:17: ... 7%|▋ | 2/30 [00:00<00:00, 455.53 it/sec, obj=0.924]
INFO - 16:26:17:
INFO - 16:26:17: ... 10%|█ | 3/30 [00:00<00:00, 513.23 it/sec, obj=0.924]
INFO - 16:26:17:
INFO - 16:26:17:
INFO - 16:26:17: Optimization result:
INFO - 16:26:17: Optimizer info:
INFO - 16:26:17: Status: None
INFO - 16:26:17: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:26:17: Number of calls to the objective function by the optimizer: 4
INFO - 16:26:17: Solution:
INFO - 16:26:17: The solution is feasible.
INFO - 16:26:17: Objective: 0.9239330847904542
INFO - 16:26:17: Standardized constraints:
INFO - 16:26:17: g_3 = [-8.94559434e-01 -1.05440566e-01 2.22044605e-16 -1.83255000e-01]
INFO - 16:26:17: Design space:
INFO - 16:26:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:17: | x_3 | 0.1 | 0.1562447456462875 | 1 | float |
INFO - 16:26:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:17: *** End PropulsionScenario execution (time: 0:00:00.017792) ***
INFO - 16:26:17:
INFO - 16:26:17: *** Start AerodynamicsScenario execution ***
INFO - 16:26:17: AerodynamicsScenario
INFO - 16:26:17: Disciplines: SobieskiAerodynamics
INFO - 16:26:17: MDO formulation: DisciplinaryOpt
INFO - 16:26:17: Optimization problem:
INFO - 16:26:17: minimize -y_24(x_2)
INFO - 16:26:17: with respect to x_2
INFO - 16:26:17: subject to constraints:
INFO - 16:26:17: g_2(x_2) <= 0.0
INFO - 16:26:17: over the design space:
INFO - 16:26:17: +------+-------------+-------+-------------+-------+
INFO - 16:26:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:17: +------+-------------+-------+-------------+-------+
INFO - 16:26:17: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:17: +------+-------------+-------+-------------+-------+
INFO - 16:26:17: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:17: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:17:
INFO - 16:26:17: ... 3%|▎ | 1/30 [00:00<00:00, 980.89 it/sec, obj=-8.4]
INFO - 16:26:17:
INFO - 16:26:17:
INFO - 16:26:17: Optimization result:
INFO - 16:26:17: Optimizer info:
INFO - 16:26:17: Status: 8
INFO - 16:26:17: Message: Positive directional derivative for linesearch
INFO - 16:26:17: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:17: Solution:
INFO - 16:26:17: The solution is feasible.
INFO - 16:26:17: Objective: -8.396991355342527
INFO - 16:26:17: Standardized constraints:
INFO - 16:26:17: g_2 = -2.220446049250313e-16
INFO - 16:26:17: Design space:
INFO - 16:26:17: +------+-------------+-------+-------------+-------+
INFO - 16:26:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:17: +------+-------------+-------+-------------+-------+
INFO - 16:26:17: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:17: +------+-------------+-------+-------------+-------+
INFO - 16:26:17: *** End AerodynamicsScenario execution (time: 0:00:00.014785) ***
INFO - 16:26:17:
INFO - 16:26:17: *** Start StructureScenario execution ***
INFO - 16:26:17: StructureScenario
INFO - 16:26:17: Disciplines: SobieskiStructure
INFO - 16:26:17: MDO formulation: DisciplinaryOpt
INFO - 16:26:17: Optimization problem:
INFO - 16:26:17: minimize -y_11(x_1)
INFO - 16:26:17: with respect to x_1
INFO - 16:26:17: subject to constraints:
INFO - 16:26:17: g_1(x_1) <= 0.0
INFO - 16:26:17: over the design space:
INFO - 16:26:17: +--------+-------------+-------+-------------+-------+
INFO - 16:26:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:17: +--------+-------------+-------+-------------+-------+
INFO - 16:26:17: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:26:17: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:17: +--------+-------------+-------+-------------+-------+
INFO - 16:26:17: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:17: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:17:
INFO - 16:26:17: ... 3%|▎ | 1/30 [00:00<00:00, 589.75 it/sec, obj=-.443]
INFO - 16:26:17:
INFO - 16:26:17:
INFO - 16:26:17: Optimization result:
INFO - 16:26:17: Optimizer info:
INFO - 16:26:17: Status: 8
INFO - 16:26:17: Message: Positive directional derivative for linesearch
INFO - 16:26:17: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:17: Solution:
INFO - 16:26:17: The solution is feasible.
INFO - 16:26:17: Objective: -0.4425230617917048
INFO - 16:26:17: Standardized constraints:
INFO - 16:26:17: g_1 = [-0.01687925 -0.03233092 -0.04340248 -0.05111604 -0.05670451 -0.1388029
INFO - 16:26:17: -0.1011971 ]
INFO - 16:26:17: Design space:
INFO - 16:26:17: +--------+-------------+-------+-------------+-------+
INFO - 16:26:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:17: +--------+-------------+-------+-------------+-------+
INFO - 16:26:17: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:26:17: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:17: +--------+-------------+-------+-------------+-------+
INFO - 16:26:17: *** End StructureScenario execution (time: 0:00:00.017306) ***
INFO - 16:26:17: ... 68%|██████▊ | 34/50 [00:09<00:04, 3.74 it/sec, obj=-3.23e+3]
INFO - 16:26:17:
INFO - 16:26:17: *** Start PropulsionScenario execution ***
INFO - 16:26:17: PropulsionScenario
INFO - 16:26:17: Disciplines: SobieskiPropulsion
INFO - 16:26:17: MDO formulation: DisciplinaryOpt
INFO - 16:26:17: Optimization problem:
INFO - 16:26:17: minimize y_34(x_3)
INFO - 16:26:17: with respect to x_3
INFO - 16:26:17: subject to constraints:
INFO - 16:26:17: g_3(x_3) <= 0.0
INFO - 16:26:17: over the design space:
INFO - 16:26:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:17: | x_3 | 0.1 | 0.1562447456462875 | 1 | float |
INFO - 16:26:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:17: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:17: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:17:
INFO - 16:26:17: ... 3%|▎ | 1/30 [00:00<00:00, 1036.40 it/sec, obj=0.924]
INFO - 16:26:17:
INFO - 16:26:17: ... 7%|▋ | 2/30 [00:00<00:00, 424.01 it/sec, obj=0.924]
INFO - 16:26:17:
INFO - 16:26:17: ... 10%|█ | 3/30 [00:00<00:00, 485.10 it/sec, obj=0.924]
INFO - 16:26:17:
INFO - 16:26:17:
INFO - 16:26:17: Optimization result:
INFO - 16:26:17: Optimizer info:
INFO - 16:26:17: Status: None
INFO - 16:26:17: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:26:17: Number of calls to the objective function by the optimizer: 4
INFO - 16:26:17: Solution:
INFO - 16:26:17: The solution is feasible.
INFO - 16:26:17: Objective: 0.9239330847904542
INFO - 16:26:17: Standardized constraints:
INFO - 16:26:17: g_3 = [-9.20116502e-01 -7.98834983e-02 2.22044605e-16 -1.83255000e-01]
INFO - 16:26:17: Design space:
INFO - 16:26:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:17: | x_3 | 0.1 | 0.1562447456462875 | 1 | float |
INFO - 16:26:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:17: *** End PropulsionScenario execution (time: 0:00:00.017881) ***
INFO - 16:26:17:
INFO - 16:26:17: *** Start AerodynamicsScenario execution ***
INFO - 16:26:17: AerodynamicsScenario
INFO - 16:26:17: Disciplines: SobieskiAerodynamics
INFO - 16:26:17: MDO formulation: DisciplinaryOpt
INFO - 16:26:17: Optimization problem:
INFO - 16:26:17: minimize -y_24(x_2)
INFO - 16:26:17: with respect to x_2
INFO - 16:26:17: subject to constraints:
INFO - 16:26:17: g_2(x_2) <= 0.0
INFO - 16:26:17: over the design space:
INFO - 16:26:17: +------+-------------+-------+-------------+-------+
INFO - 16:26:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:17: +------+-------------+-------+-------------+-------+
INFO - 16:26:17: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:17: +------+-------------+-------+-------------+-------+
INFO - 16:26:17: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:17: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:17:
INFO - 16:26:17: ... 3%|▎ | 1/30 [00:00<00:00, 1754.94 it/sec, obj=-8.73]
INFO - 16:26:17:
INFO - 16:26:17:
INFO - 16:26:17: Optimization result:
INFO - 16:26:17: Optimizer info:
INFO - 16:26:17: Status: 8
INFO - 16:26:17: Message: Positive directional derivative for linesearch
INFO - 16:26:17: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:17: Solution:
INFO - 16:26:17: The solution is feasible.
INFO - 16:26:17: Objective: -8.730972142914093
INFO - 16:26:17: Standardized constraints:
INFO - 16:26:17: g_2 = 2.220446049250313e-16
INFO - 16:26:17: Design space:
INFO - 16:26:17: +------+-------------+-------+-------------+-------+
INFO - 16:26:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:17: +------+-------------+-------+-------------+-------+
INFO - 16:26:17: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:17: +------+-------------+-------+-------------+-------+
INFO - 16:26:17: *** End AerodynamicsScenario execution (time: 0:00:00.014117) ***
INFO - 16:26:17:
INFO - 16:26:17: *** Start StructureScenario execution ***
INFO - 16:26:17: StructureScenario
INFO - 16:26:17: Disciplines: SobieskiStructure
INFO - 16:26:17: MDO formulation: DisciplinaryOpt
INFO - 16:26:17: Optimization problem:
INFO - 16:26:17: minimize -y_11(x_1)
INFO - 16:26:17: with respect to x_1
INFO - 16:26:17: subject to constraints:
INFO - 16:26:17: g_1(x_1) <= 0.0
INFO - 16:26:17: over the design space:
INFO - 16:26:17: +--------+-------------+-------+-------------+-------+
INFO - 16:26:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:17: +--------+-------------+-------+-------------+-------+
INFO - 16:26:17: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:26:17: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:17: +--------+-------------+-------+-------------+-------+
INFO - 16:26:17: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:17: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:17:
INFO - 16:26:17: ... 3%|▎ | 1/30 [00:00<00:00, 1813.36 it/sec, obj=-.431]
INFO - 16:26:17:
INFO - 16:26:17:
INFO - 16:26:17: Optimization result:
INFO - 16:26:17: Optimizer info:
INFO - 16:26:17: Status: 8
INFO - 16:26:17: Message: Positive directional derivative for linesearch
INFO - 16:26:17: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:17: Solution:
INFO - 16:26:17: The solution is feasible.
INFO - 16:26:17: Objective: -0.43069167221868343
INFO - 16:26:17: Standardized constraints:
INFO - 16:26:17: g_1 = [-0.02899642 -0.04275767 -0.05210327 -0.05849943 -0.0630922 -0.12268755
INFO - 16:26:17: -0.11731245]
INFO - 16:26:17: Design space:
INFO - 16:26:17: +--------+-------------+-------+-------------+-------+
INFO - 16:26:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:17: +--------+-------------+-------+-------------+-------+
INFO - 16:26:17: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:26:17: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:17: +--------+-------------+-------+-------------+-------+
INFO - 16:26:17: *** End StructureScenario execution (time: 0:00:00.016227) ***
INFO - 16:26:17: ... 70%|███████ | 35/50 [00:09<00:03, 3.80 it/sec, obj=-3.27e+3]
INFO - 16:26:17:
INFO - 16:26:17: *** Start PropulsionScenario execution ***
INFO - 16:26:17: PropulsionScenario
INFO - 16:26:17: Disciplines: SobieskiPropulsion
INFO - 16:26:17: MDO formulation: DisciplinaryOpt
INFO - 16:26:17: Optimization problem:
INFO - 16:26:17: minimize y_34(x_3)
INFO - 16:26:17: with respect to x_3
INFO - 16:26:17: subject to constraints:
INFO - 16:26:17: g_3(x_3) <= 0.0
INFO - 16:26:17: over the design space:
INFO - 16:26:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:17: | x_3 | 0.1 | 0.1562447456462875 | 1 | float |
INFO - 16:26:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:17: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:17: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:17:
INFO - 16:26:17: ... 3%|▎ | 1/30 [00:00<00:00, 1784.05 it/sec, obj=0.924]
INFO - 16:26:17:
INFO - 16:26:17: ... 7%|▋ | 2/30 [00:00<00:00, 459.67 it/sec, obj=0.924]
INFO - 16:26:17:
INFO - 16:26:17: ... 10%|█ | 3/30 [00:00<00:00, 512.73 it/sec, obj=0.924]
INFO - 16:26:17:
INFO - 16:26:17:
INFO - 16:26:17: Optimization result:
INFO - 16:26:17: Optimizer info:
INFO - 16:26:17: Status: None
INFO - 16:26:17: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:26:17: Number of calls to the objective function by the optimizer: 4
INFO - 16:26:17: Solution:
INFO - 16:26:17: The solution is feasible.
INFO - 16:26:17: Objective: 0.9239330847904542
INFO - 16:26:17: Standardized constraints:
INFO - 16:26:17: g_3 = [-9.46224945e-01 -5.37750551e-02 2.22044605e-16 -1.83255000e-01]
INFO - 16:26:17: Design space:
INFO - 16:26:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:17: | x_3 | 0.1 | 0.1562447456462875 | 1 | float |
INFO - 16:26:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:17: *** End PropulsionScenario execution (time: 0:00:00.017650) ***
INFO - 16:26:17:
INFO - 16:26:17: *** Start AerodynamicsScenario execution ***
INFO - 16:26:17: AerodynamicsScenario
INFO - 16:26:17: Disciplines: SobieskiAerodynamics
INFO - 16:26:17: MDO formulation: DisciplinaryOpt
INFO - 16:26:17: Optimization problem:
INFO - 16:26:17: minimize -y_24(x_2)
INFO - 16:26:17: with respect to x_2
INFO - 16:26:17: subject to constraints:
INFO - 16:26:17: g_2(x_2) <= 0.0
INFO - 16:26:17: over the design space:
INFO - 16:26:17: +------+-------------+-------+-------------+-------+
INFO - 16:26:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:17: +------+-------------+-------+-------------+-------+
INFO - 16:26:17: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:17: +------+-------------+-------+-------------+-------+
INFO - 16:26:17: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:17: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:17:
INFO - 16:26:17: ... 3%|▎ | 1/30 [00:00<00:00, 925.08 it/sec, obj=-9.09]
INFO - 16:26:17:
INFO - 16:26:17:
INFO - 16:26:17: Optimization result:
INFO - 16:26:17: Optimizer info:
INFO - 16:26:17: Status: 8
INFO - 16:26:17: Message: Positive directional derivative for linesearch
INFO - 16:26:17: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:17: Solution:
INFO - 16:26:17: The solution is feasible.
INFO - 16:26:17: Objective: -9.092414006420524
INFO - 16:26:17: Standardized constraints:
INFO - 16:26:17: g_2 = 0.0
INFO - 16:26:17: Design space:
INFO - 16:26:17: +------+-------------+-------+-------------+-------+
INFO - 16:26:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:17: +------+-------------+-------+-------------+-------+
INFO - 16:26:17: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:17: +------+-------------+-------+-------------+-------+
INFO - 16:26:17: *** End AerodynamicsScenario execution (time: 0:00:00.014938) ***
INFO - 16:26:17:
INFO - 16:26:17: *** Start StructureScenario execution ***
INFO - 16:26:17: StructureScenario
INFO - 16:26:17: Disciplines: SobieskiStructure
INFO - 16:26:17: MDO formulation: DisciplinaryOpt
INFO - 16:26:17: Optimization problem:
INFO - 16:26:17: minimize -y_11(x_1)
INFO - 16:26:17: with respect to x_1
INFO - 16:26:17: subject to constraints:
INFO - 16:26:17: g_1(x_1) <= 0.0
INFO - 16:26:17: over the design space:
INFO - 16:26:17: +--------+-------------+-------+-------------+-------+
INFO - 16:26:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:17: +--------+-------------+-------+-------------+-------+
INFO - 16:26:17: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:26:17: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:17: +--------+-------------+-------+-------------+-------+
INFO - 16:26:17: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:17: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:17:
INFO - 16:26:17: ... 3%|▎ | 1/30 [00:00<00:00, 567.10 it/sec, obj=-.418]
INFO - 16:26:17:
INFO - 16:26:17:
INFO - 16:26:17: Optimization result:
INFO - 16:26:17: Optimizer info:
INFO - 16:26:17: Status: 8
INFO - 16:26:17: Message: Positive directional derivative for linesearch
INFO - 16:26:17: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:17: Solution:
INFO - 16:26:17: The solution is feasible.
INFO - 16:26:17: Objective: -0.41826612137220287
INFO - 16:26:17: Standardized constraints:
INFO - 16:26:17: g_1 = [-0.03827366 -0.05074067 -0.05876484 -0.06415236 -0.06798279 -0.11090577
INFO - 16:26:17: -0.12909423]
INFO - 16:26:17: Design space:
INFO - 16:26:17: +--------+-------------+-------+-------------+-------+
INFO - 16:26:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:17: +--------+-------------+-------+-------------+-------+
INFO - 16:26:17: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:26:17: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:17: +--------+-------------+-------+-------------+-------+
INFO - 16:26:17: *** End StructureScenario execution (time: 0:00:00.017462) ***
INFO - 16:26:17: ... 72%|███████▏ | 36/50 [00:09<00:03, 3.84 it/sec, obj=-3.3e+3]
INFO - 16:26:17:
INFO - 16:26:17: *** Start PropulsionScenario execution ***
INFO - 16:26:17: PropulsionScenario
INFO - 16:26:17: Disciplines: SobieskiPropulsion
INFO - 16:26:17: MDO formulation: DisciplinaryOpt
INFO - 16:26:17: Optimization problem:
INFO - 16:26:17: minimize y_34(x_3)
INFO - 16:26:17: with respect to x_3
INFO - 16:26:17: subject to constraints:
INFO - 16:26:17: g_3(x_3) <= 0.0
INFO - 16:26:17: over the design space:
INFO - 16:26:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:17: | x_3 | 0.1 | 0.1562447456462875 | 1 | float |
INFO - 16:26:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:17: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:17: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:17:
INFO - 16:26:17: ... 3%|▎ | 1/30 [00:00<00:00, 1807.11 it/sec, obj=0.924]
INFO - 16:26:17:
INFO - 16:26:17: ... 7%|▋ | 2/30 [00:00<00:00, 460.23 it/sec, obj=0.924]
INFO - 16:26:17:
INFO - 16:26:17: ... 10%|█ | 3/30 [00:00<00:00, 513.61 it/sec, obj=0.924]
INFO - 16:26:17:
INFO - 16:26:17:
INFO - 16:26:17: Optimization result:
INFO - 16:26:17: Optimizer info:
INFO - 16:26:17: Status: None
INFO - 16:26:17: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:26:17: Number of calls to the objective function by the optimizer: 4
INFO - 16:26:17: Solution:
INFO - 16:26:17: The solution is feasible.
INFO - 16:26:17: Objective: 0.9239330847904542
INFO - 16:26:17: Standardized constraints:
INFO - 16:26:17: g_3 = [-9.69485254e-01 -3.05147458e-02 2.22044605e-16 -1.83255000e-01]
INFO - 16:26:17: Design space:
INFO - 16:26:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:17: | x_3 | 0.1 | 0.1562447456462875 | 1 | float |
INFO - 16:26:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:17: *** End PropulsionScenario execution (time: 0:00:00.017604) ***
INFO - 16:26:17:
INFO - 16:26:17: *** Start AerodynamicsScenario execution ***
INFO - 16:26:17: AerodynamicsScenario
INFO - 16:26:17: Disciplines: SobieskiAerodynamics
INFO - 16:26:17: MDO formulation: DisciplinaryOpt
INFO - 16:26:17: Optimization problem:
INFO - 16:26:17: minimize -y_24(x_2)
INFO - 16:26:17: with respect to x_2
INFO - 16:26:17: subject to constraints:
INFO - 16:26:17: g_2(x_2) <= 0.0
INFO - 16:26:17: over the design space:
INFO - 16:26:17: +------+-------------+-------+-------------+-------+
INFO - 16:26:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:17: +------+-------------+-------+-------------+-------+
INFO - 16:26:17: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:17: +------+-------------+-------+-------------+-------+
INFO - 16:26:17: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:17: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:17:
INFO - 16:26:17: ... 3%|▎ | 1/30 [00:00<00:00, 951.31 it/sec, obj=-9.2]
INFO - 16:26:17:
INFO - 16:26:17:
INFO - 16:26:17: Optimization result:
INFO - 16:26:17: Optimizer info:
INFO - 16:26:17: Status: 8
INFO - 16:26:17: Message: Positive directional derivative for linesearch
INFO - 16:26:17: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:17: Solution:
INFO - 16:26:17: The solution is feasible.
INFO - 16:26:17: Objective: -9.202415609204534
INFO - 16:26:17: Standardized constraints:
INFO - 16:26:17: g_2 = 0.0
INFO - 16:26:17: Design space:
INFO - 16:26:17: +------+-------------+-------+-------------+-------+
INFO - 16:26:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:17: +------+-------------+-------+-------------+-------+
INFO - 16:26:17: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:17: +------+-------------+-------+-------------+-------+
INFO - 16:26:17: *** End AerodynamicsScenario execution (time: 0:00:00.015109) ***
INFO - 16:26:17:
INFO - 16:26:17: *** Start StructureScenario execution ***
INFO - 16:26:17: StructureScenario
INFO - 16:26:17: Disciplines: SobieskiStructure
INFO - 16:26:17: MDO formulation: DisciplinaryOpt
INFO - 16:26:17: Optimization problem:
INFO - 16:26:17: minimize -y_11(x_1)
INFO - 16:26:17: with respect to x_1
INFO - 16:26:17: subject to constraints:
INFO - 16:26:17: g_1(x_1) <= 0.0
INFO - 16:26:17: over the design space:
INFO - 16:26:17: +--------+-------------+-------+-------------+-------+
INFO - 16:26:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:17: +--------+-------------+-------+-------------+-------+
INFO - 16:26:17: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:26:17: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:17: +--------+-------------+-------+-------------+-------+
INFO - 16:26:17: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:17: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:17:
INFO - 16:26:17: ... 3%|▎ | 1/30 [00:00<00:00, 496.25 it/sec, obj=-.394]
INFO - 16:26:17:
INFO - 16:26:17:
INFO - 16:26:17: Optimization result:
INFO - 16:26:17: Optimizer info:
INFO - 16:26:17: Status: 8
INFO - 16:26:17: Message: Positive directional derivative for linesearch
INFO - 16:26:17: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:17: Solution:
INFO - 16:26:17: The solution is feasible.
INFO - 16:26:17: Objective: -0.39426901853853513
INFO - 16:26:17: Standardized constraints:
INFO - 16:26:17: g_1 = [-0.03827366 -0.05074067 -0.05876484 -0.06415236 -0.06798279 -0.11090577
INFO - 16:26:17: -0.12909423]
INFO - 16:26:17: Design space:
INFO - 16:26:17: +--------+-------------+-------+-------------+-------+
INFO - 16:26:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:17: +--------+-------------+-------+-------------+-------+
INFO - 16:26:17: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:26:17: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:17: +--------+-------------+-------+-------------+-------+
INFO - 16:26:17: *** End StructureScenario execution (time: 0:00:00.017973) ***
INFO - 16:26:17: ... 74%|███████▍ | 37/50 [00:09<00:03, 3.89 it/sec, obj=-3.15e+3]
INFO - 16:26:17:
INFO - 16:26:17: *** Start PropulsionScenario execution ***
INFO - 16:26:17: PropulsionScenario
INFO - 16:26:17: Disciplines: SobieskiPropulsion
INFO - 16:26:17: MDO formulation: DisciplinaryOpt
INFO - 16:26:17: Optimization problem:
INFO - 16:26:17: minimize y_34(x_3)
INFO - 16:26:17: with respect to x_3
INFO - 16:26:17: subject to constraints:
INFO - 16:26:17: g_3(x_3) <= 0.0
INFO - 16:26:17: over the design space:
INFO - 16:26:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:17: | x_3 | 0.1 | 0.1562447456462875 | 1 | float |
INFO - 16:26:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:17: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:17: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:17:
INFO - 16:26:17: ... 3%|▎ | 1/30 [00:00<00:00, 1776.49 it/sec, obj=0.927]
INFO - 16:26:17:
INFO - 16:26:17: ... 7%|▋ | 2/30 [00:00<00:00, 454.64 it/sec, obj=0.927]
INFO - 16:26:17:
INFO - 16:26:17: ... 10%|█ | 3/30 [00:00<00:00, 420.26 it/sec, obj=0.927]
INFO - 16:26:17:
INFO - 16:26:17:
INFO - 16:26:17: Optimization result:
INFO - 16:26:17: Optimizer info:
INFO - 16:26:17: Status: 8
INFO - 16:26:17: Message: Positive directional derivative for linesearch
INFO - 16:26:17: Number of calls to the objective function by the optimizer: 6
INFO - 16:26:17: Solution:
INFO - 16:26:17: The solution is feasible.
INFO - 16:26:17: Objective: 0.9268270392385305
INFO - 16:26:17: Standardized constraints:
INFO - 16:26:17: g_3 = [-0.93490547 -0.06509453 0. -0.18310955]
INFO - 16:26:17: Design space:
INFO - 16:26:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:17: | x_3 | 0.1 | 0.1570153670153535 | 1 | float |
INFO - 16:26:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:17: *** End PropulsionScenario execution (time: 0:00:00.020862) ***
INFO - 16:26:17:
INFO - 16:26:17: *** Start AerodynamicsScenario execution ***
INFO - 16:26:17: AerodynamicsScenario
INFO - 16:26:17: Disciplines: SobieskiAerodynamics
INFO - 16:26:17: MDO formulation: DisciplinaryOpt
INFO - 16:26:17: Optimization problem:
INFO - 16:26:17: minimize -y_24(x_2)
INFO - 16:26:17: with respect to x_2
INFO - 16:26:17: subject to constraints:
INFO - 16:26:17: g_2(x_2) <= 0.0
INFO - 16:26:17: over the design space:
INFO - 16:26:17: +------+-------------+-------+-------------+-------+
INFO - 16:26:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:17: +------+-------------+-------+-------------+-------+
INFO - 16:26:17: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:17: +------+-------------+-------+-------------+-------+
INFO - 16:26:17: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:17: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:17:
INFO - 16:26:17: ... 3%|▎ | 1/30 [00:00<00:00, 988.76 it/sec, obj=-8.98]
INFO - 16:26:17:
INFO - 16:26:17: ... 7%|▋ | 2/30 [00:00<00:00, 404.89 it/sec, obj=-8.98]
INFO - 16:26:17:
INFO - 16:26:17: ... 10%|█ | 3/30 [00:00<00:00, 456.81 it/sec, obj=-8.98]
INFO - 16:26:17:
INFO - 16:26:17: ... 13%|█▎ | 4/30 [00:00<00:00, 482.42 it/sec, obj=-8.98]
INFO - 16:26:17:
INFO - 16:26:17: ... 17%|█▋ | 5/30 [00:00<00:00, 498.56 it/sec, obj=-8.98]
INFO - 16:26:17:
INFO - 16:26:17: ... 20%|██ | 6/30 [00:00<00:00, 510.33 it/sec, obj=-8.98]
INFO - 16:26:17:
INFO - 16:26:17: ... 23%|██▎ | 7/30 [00:00<00:00, 519.88 it/sec, obj=-8.98]
INFO - 16:26:17:
INFO - 16:26:17: ... 27%|██▋ | 8/30 [00:00<00:00, 525.03 it/sec, obj=-8.98]
INFO - 16:26:17:
INFO - 16:26:17: ... 30%|███ | 9/30 [00:00<00:00, 531.39 it/sec, obj=-8.98]
INFO - 16:26:17:
INFO - 16:26:17: ... 33%|███▎ | 10/30 [00:00<00:00, 535.41 it/sec, obj=-8.98]
INFO - 16:26:17:
INFO - 16:26:17: ... 37%|███▋ | 11/30 [00:00<00:00, 539.21 it/sec, obj=-8.98]
INFO - 16:26:17:
INFO - 16:26:17: ... 40%|████ | 12/30 [00:00<00:00, 542.24 it/sec, obj=-8.98]
INFO - 16:26:17:
INFO - 16:26:17: ... 43%|████▎ | 13/30 [00:00<00:00, 515.63 it/sec, obj=-8.98]
INFO - 16:26:17:
INFO - 16:26:17: ... 47%|████▋ | 14/30 [00:00<00:00, 519.73 it/sec, obj=-8.98]
INFO - 16:26:17:
INFO - 16:26:17: ... 50%|█████ | 15/30 [00:00<00:00, 523.45 it/sec, obj=-8.98]
INFO - 16:26:17:
INFO - 16:26:17: ... 53%|█████▎ | 16/30 [00:00<00:00, 526.08 it/sec, obj=-8.98]
INFO - 16:26:17:
INFO - 16:26:17: ... 57%|█████▋ | 17/30 [00:00<00:00, 529.19 it/sec, obj=-8.98]
INFO - 16:26:17:
INFO - 16:26:17: ... 60%|██████ | 18/30 [00:00<00:00, 531.71 it/sec, obj=-8.98]
INFO - 16:26:17:
INFO - 16:26:17: ... 63%|██████▎ | 19/30 [00:00<00:00, 534.26 it/sec, obj=-8.98]
INFO - 16:26:17:
INFO - 16:26:17: ... 67%|██████▋ | 20/30 [00:00<00:00, 536.63 it/sec, obj=-8.98]
INFO - 16:26:17:
INFO - 16:26:17: ... 70%|███████ | 21/30 [00:00<00:00, 538.16 it/sec, obj=-8.98]
INFO - 16:26:17:
INFO - 16:26:17: ... 73%|███████▎ | 22/30 [00:00<00:00, 509.43 it/sec, obj=-8.98]
INFO - 16:26:17:
INFO - 16:26:17: ... 77%|███████▋ | 23/30 [00:00<00:00, 496.42 it/sec, obj=-8.98]
INFO - 16:26:17:
INFO - 16:26:17: ... 80%|████████ | 24/30 [00:00<00:00, 496.66 it/sec, obj=-8.98]
INFO - 16:26:17:
INFO - 16:26:17: ... 83%|████████▎ | 25/30 [00:00<00:00, 499.48 it/sec, obj=-8.98]
INFO - 16:26:17:
INFO - 16:26:17: ... 87%|████████▋ | 26/30 [00:00<00:00, 502.25 it/sec, obj=-8.98]
INFO - 16:26:17:
INFO - 16:26:17: ... 90%|█████████ | 27/30 [00:00<00:00, 505.03 it/sec, obj=-8.98]
INFO - 16:26:17:
INFO - 16:26:17: ... 93%|█████████▎| 28/30 [00:00<00:00, 507.18 it/sec, obj=-8.98]
INFO - 16:26:17:
INFO - 16:26:17: ... 97%|█████████▋| 29/30 [00:00<00:00, 509.62 it/sec, obj=-8.98]
INFO - 16:26:17:
INFO - 16:26:17: ... 100%|██████████| 30/30 [00:00<00:00, 511.65 it/sec, obj=-8.98]
INFO - 16:26:17:
WARNING - 16:26:17: Optimization found no feasible point ! The least infeasible point is selected.
INFO - 16:26:17:
INFO - 16:26:17: Optimization result:
INFO - 16:26:17: Optimizer info:
INFO - 16:26:17: Status: None
INFO - 16:26:17: Message: Maximum number of iterations reached. GEMSEO Stopped the driver
INFO - 16:26:17: Number of calls to the objective function by the optimizer: 44
INFO - 16:26:17: Solution:
WARNING - 16:26:17: The solution is not feasible.
INFO - 16:26:17: Objective: -8.976400385348922
INFO - 16:26:17: Standardized constraints:
INFO - 16:26:17: g_2 = 0.0025482827855949353
INFO - 16:26:17: Design space:
INFO - 16:26:17: +------+-------------+-------+-------------+-------+
INFO - 16:26:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:17: +------+-------------+-------+-------------+-------+
INFO - 16:26:17: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:17: +------+-------------+-------+-------------+-------+
INFO - 16:26:17: *** End AerodynamicsScenario execution (time: 0:00:00.071339) ***
INFO - 16:26:17:
INFO - 16:26:17: *** Start StructureScenario execution ***
INFO - 16:26:17: StructureScenario
INFO - 16:26:17: Disciplines: SobieskiStructure
INFO - 16:26:17: MDO formulation: DisciplinaryOpt
INFO - 16:26:17: Optimization problem:
INFO - 16:26:17: minimize -y_11(x_1)
INFO - 16:26:17: with respect to x_1
INFO - 16:26:17: subject to constraints:
INFO - 16:26:17: g_1(x_1) <= 0.0
INFO - 16:26:17: over the design space:
INFO - 16:26:17: +--------+-------------+-------+-------------+-------+
INFO - 16:26:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:17: +--------+-------------+-------+-------------+-------+
INFO - 16:26:17: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:26:17: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:17: +--------+-------------+-------+-------------+-------+
INFO - 16:26:17: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:17: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:17:
INFO - 16:26:17: ... 3%|▎ | 1/30 [00:00<00:00, 577.89 it/sec, obj=-.417]
INFO - 16:26:17:
INFO - 16:26:17:
INFO - 16:26:17: Optimization result:
INFO - 16:26:17: Optimizer info:
INFO - 16:26:17: Status: 8
INFO - 16:26:17: Message: Positive directional derivative for linesearch
INFO - 16:26:17: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:17: Solution:
INFO - 16:26:17: The solution is feasible.
INFO - 16:26:17: Objective: -0.4170220966506021
INFO - 16:26:17: Standardized constraints:
INFO - 16:26:17: g_1 = [-0.04397497 -0.05539816 -0.06257919 -0.06735802 -0.07073983 -0.11090577
INFO - 16:26:17: -0.12909423]
INFO - 16:26:17: Design space:
INFO - 16:26:17: +--------+-------------+-------+-------------+-------+
INFO - 16:26:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:17: +--------+-------------+-------+-------------+-------+
INFO - 16:26:17: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:26:17: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:17: +--------+-------------+-------+-------------+-------+
INFO - 16:26:17: *** End StructureScenario execution (time: 0:00:00.017704) ***
WARNING - 16:26:17: MDAJacobi has reached its maximum number of iterations but the normed residual 5.3741673231224435e-14 is still above the tolerance 1e-14.
INFO - 16:26:17: ... 76%|███████▌ | 38/50 [00:09<00:03, 3.88 it/sec, obj=-3.24e+3]
INFO - 16:26:17:
INFO - 16:26:17: *** Start PropulsionScenario execution ***
INFO - 16:26:17: PropulsionScenario
INFO - 16:26:17: Disciplines: SobieskiPropulsion
INFO - 16:26:17: MDO formulation: DisciplinaryOpt
INFO - 16:26:17: Optimization problem:
INFO - 16:26:17: minimize y_34(x_3)
INFO - 16:26:17: with respect to x_3
INFO - 16:26:17: subject to constraints:
INFO - 16:26:17: g_3(x_3) <= 0.0
INFO - 16:26:17: over the design space:
INFO - 16:26:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:17: | x_3 | 0.1 | 0.1570153670153535 | 1 | float |
INFO - 16:26:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:17: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:17: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:17:
INFO - 16:26:17: ... 3%|▎ | 1/30 [00:00<00:00, 1081.01 it/sec, obj=0.937]
INFO - 16:26:17:
INFO - 16:26:17: ... 7%|▋ | 2/30 [00:00<00:00, 423.86 it/sec, obj=0.936]
INFO - 16:26:17:
INFO - 16:26:17: ... 10%|█ | 3/30 [00:00<00:00, 403.08 it/sec, obj=0.936]
INFO - 16:26:17:
INFO - 16:26:17: ... 13%|█▎ | 4/30 [00:00<00:00, 373.18 it/sec, obj=0.936]
INFO - 16:26:17:
INFO - 16:26:17:
INFO - 16:26:17: Optimization result:
INFO - 16:26:17: Optimizer info:
INFO - 16:26:17: Status: None
INFO - 16:26:17: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:26:17: Number of calls to the objective function by the optimizer: 6
INFO - 16:26:17: Solution:
INFO - 16:26:17: The solution is feasible.
INFO - 16:26:17: Objective: 0.9360322600542967
INFO - 16:26:17: Standardized constraints:
INFO - 16:26:17: g_3 = [-9.18555876e-01 -8.14441238e-02 -3.33066907e-16 -1.81277829e-01]
INFO - 16:26:17: Design space:
INFO - 16:26:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:17: | x_3 | 0.1 | 0.1583589011775864 | 1 | float |
INFO - 16:26:17: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:17: *** End PropulsionScenario execution (time: 0:00:00.022497) ***
INFO - 16:26:17:
INFO - 16:26:17: *** Start AerodynamicsScenario execution ***
INFO - 16:26:17: AerodynamicsScenario
INFO - 16:26:17: Disciplines: SobieskiAerodynamics
INFO - 16:26:17: MDO formulation: DisciplinaryOpt
INFO - 16:26:17: Optimization problem:
INFO - 16:26:17: minimize -y_24(x_2)
INFO - 16:26:17: with respect to x_2
INFO - 16:26:17: subject to constraints:
INFO - 16:26:17: g_2(x_2) <= 0.0
INFO - 16:26:17: over the design space:
INFO - 16:26:17: +------+-------------+-------+-------------+-------+
INFO - 16:26:17: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:17: +------+-------------+-------+-------------+-------+
INFO - 16:26:17: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:17: +------+-------------+-------+-------------+-------+
INFO - 16:26:17: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:17: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:17:
INFO - 16:26:18: ... 3%|▎ | 1/30 [00:00<00:00, 954.34 it/sec, obj=-8.85]
INFO - 16:26:18:
INFO - 16:26:18:
INFO - 16:26:18: Optimization result:
INFO - 16:26:18: Optimizer info:
INFO - 16:26:18: Status: 8
INFO - 16:26:18: Message: Positive directional derivative for linesearch
INFO - 16:26:18: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:18: Solution:
INFO - 16:26:18: The solution is feasible.
INFO - 16:26:18: Objective: -8.853016007372387
INFO - 16:26:18: Standardized constraints:
INFO - 16:26:18: g_2 = 0.0
INFO - 16:26:18: Design space:
INFO - 16:26:18: +------+-------------+-------+-------------+-------+
INFO - 16:26:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:18: +------+-------------+-------+-------------+-------+
INFO - 16:26:18: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:18: +------+-------------+-------+-------------+-------+
INFO - 16:26:18: *** End AerodynamicsScenario execution (time: 0:00:00.015024) ***
INFO - 16:26:18:
INFO - 16:26:18: *** Start StructureScenario execution ***
INFO - 16:26:18: StructureScenario
INFO - 16:26:18: Disciplines: SobieskiStructure
INFO - 16:26:18: MDO formulation: DisciplinaryOpt
INFO - 16:26:18: Optimization problem:
INFO - 16:26:18: minimize -y_11(x_1)
INFO - 16:26:18: with respect to x_1
INFO - 16:26:18: subject to constraints:
INFO - 16:26:18: g_1(x_1) <= 0.0
INFO - 16:26:18: over the design space:
INFO - 16:26:18: +--------+-------------+-------+-------------+-------+
INFO - 16:26:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:18: +--------+-------------+-------+-------------+-------+
INFO - 16:26:18: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:26:18: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:18: +--------+-------------+-------+-------------+-------+
INFO - 16:26:18: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:18: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:18:
INFO - 16:26:18: ... 3%|▎ | 1/30 [00:00<00:00, 576.22 it/sec, obj=-.439]
INFO - 16:26:18:
INFO - 16:26:18:
INFO - 16:26:18: Optimization result:
INFO - 16:26:18: Optimizer info:
INFO - 16:26:18: Status: 8
INFO - 16:26:18: Message: Positive directional derivative for linesearch
INFO - 16:26:18: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:18: Solution:
INFO - 16:26:18: The solution is feasible.
INFO - 16:26:18: Objective: -0.43894125895901354
INFO - 16:26:18: Standardized constraints:
INFO - 16:26:18: g_1 = [-0.03827366 -0.05074067 -0.05876484 -0.06415236 -0.06798279 -0.11090577
INFO - 16:26:18: -0.12909423]
INFO - 16:26:18: Design space:
INFO - 16:26:18: +--------+-------------+-------+-------------+-------+
INFO - 16:26:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:18: +--------+-------------+-------+-------------+-------+
INFO - 16:26:18: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:26:18: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:18: +--------+-------------+-------+-------------+-------+
INFO - 16:26:18: *** End StructureScenario execution (time: 0:00:00.017699) ***
INFO - 16:26:18: ... 78%|███████▊ | 39/50 [00:09<00:02, 3.91 it/sec, obj=-3.36e+3]
INFO - 16:26:18:
INFO - 16:26:18: *** Start PropulsionScenario execution ***
INFO - 16:26:18: PropulsionScenario
INFO - 16:26:18: Disciplines: SobieskiPropulsion
INFO - 16:26:18: MDO formulation: DisciplinaryOpt
INFO - 16:26:18: Optimization problem:
INFO - 16:26:18: minimize y_34(x_3)
INFO - 16:26:18: with respect to x_3
INFO - 16:26:18: subject to constraints:
INFO - 16:26:18: g_3(x_3) <= 0.0
INFO - 16:26:18: over the design space:
INFO - 16:26:18: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:18: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:18: | x_3 | 0.1 | 0.1583589011775864 | 1 | float |
INFO - 16:26:18: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:18: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:18: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:18:
INFO - 16:26:18: ... 3%|▎ | 1/30 [00:00<00:00, 1812.58 it/sec, obj=0.931]
INFO - 16:26:18:
INFO - 16:26:18: ... 7%|▋ | 2/30 [00:00<00:00, 463.79 it/sec, obj=0.931]
INFO - 16:26:18:
INFO - 16:26:18: ... 10%|█ | 3/30 [00:00<00:00, 520.90 it/sec, obj=0.931]
INFO - 16:26:18:
INFO - 16:26:18: ... 13%|█▎ | 4/30 [00:00<00:00, 441.31 it/sec, obj=0.931]
INFO - 16:26:18:
INFO - 16:26:18: ... 17%|█▋ | 5/30 [00:00<00:00, 406.90 it/sec, obj=0.931]
INFO - 16:26:18:
INFO - 16:26:18: ... 20%|██ | 6/30 [00:00<00:00, 420.00 it/sec, obj=0.931]
INFO - 16:26:18:
INFO - 16:26:18:
INFO - 16:26:18: Optimization result:
INFO - 16:26:18: Optimizer info:
INFO - 16:26:18: Status: None
INFO - 16:26:18: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:26:18: Number of calls to the objective function by the optimizer: 7
INFO - 16:26:18: Solution:
INFO - 16:26:18: The solution is feasible.
INFO - 16:26:18: Objective: 0.9312027585463054
INFO - 16:26:18: Standardized constraints:
INFO - 16:26:18: g_3 = [-0.89611179 -0.10388821 0. -0.18207659]
INFO - 16:26:18: Design space:
INFO - 16:26:18: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:18: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:18: | x_3 | 0.1 | 0.1574985677093928 | 1 | float |
INFO - 16:26:18: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:18: *** End PropulsionScenario execution (time: 0:00:00.026035) ***
INFO - 16:26:18:
INFO - 16:26:18: *** Start AerodynamicsScenario execution ***
INFO - 16:26:18: AerodynamicsScenario
INFO - 16:26:18: Disciplines: SobieskiAerodynamics
INFO - 16:26:18: MDO formulation: DisciplinaryOpt
INFO - 16:26:18: Optimization problem:
INFO - 16:26:18: minimize -y_24(x_2)
INFO - 16:26:18: with respect to x_2
INFO - 16:26:18: subject to constraints:
INFO - 16:26:18: g_2(x_2) <= 0.0
INFO - 16:26:18: over the design space:
INFO - 16:26:18: +------+-------------+-------+-------------+-------+
INFO - 16:26:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:18: +------+-------------+-------+-------------+-------+
INFO - 16:26:18: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:18: +------+-------------+-------+-------------+-------+
INFO - 16:26:18: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:18: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:18:
INFO - 16:26:18: ... 3%|▎ | 1/30 [00:00<00:00, 971.35 it/sec, obj=-8.7]
INFO - 16:26:18:
INFO - 16:26:18:
INFO - 16:26:18: Optimization result:
INFO - 16:26:18: Optimizer info:
INFO - 16:26:18: Status: 8
INFO - 16:26:18: Message: Positive directional derivative for linesearch
INFO - 16:26:18: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:18: Solution:
INFO - 16:26:18: The solution is feasible.
INFO - 16:26:18: Objective: -8.70155014668376
INFO - 16:26:18: Standardized constraints:
INFO - 16:26:18: g_2 = -0.001768040539908089
INFO - 16:26:18: Design space:
INFO - 16:26:18: +------+-------------+-------+-------------+-------+
INFO - 16:26:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:18: +------+-------------+-------+-------------+-------+
INFO - 16:26:18: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:18: +------+-------------+-------+-------------+-------+
INFO - 16:26:18: *** End AerodynamicsScenario execution (time: 0:00:00.014748) ***
INFO - 16:26:18:
INFO - 16:26:18: *** Start StructureScenario execution ***
INFO - 16:26:18: StructureScenario
INFO - 16:26:18: Disciplines: SobieskiStructure
INFO - 16:26:18: MDO formulation: DisciplinaryOpt
INFO - 16:26:18: Optimization problem:
INFO - 16:26:18: minimize -y_11(x_1)
INFO - 16:26:18: with respect to x_1
INFO - 16:26:18: subject to constraints:
INFO - 16:26:18: g_1(x_1) <= 0.0
INFO - 16:26:18: over the design space:
INFO - 16:26:18: +--------+-------------+-------+-------------+-------+
INFO - 16:26:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:18: +--------+-------------+-------+-------------+-------+
INFO - 16:26:18: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:26:18: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:18: +--------+-------------+-------+-------------+-------+
INFO - 16:26:18: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:18: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:18:
INFO - 16:26:18: ... 3%|▎ | 1/30 [00:00<00:00, 564.89 it/sec, obj=-.462]
INFO - 16:26:18:
INFO - 16:26:18:
INFO - 16:26:18: Optimization result:
INFO - 16:26:18: Optimizer info:
INFO - 16:26:18: Status: 8
INFO - 16:26:18: Message: Positive directional derivative for linesearch
INFO - 16:26:18: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:18: Solution:
INFO - 16:26:18: The solution is feasible.
INFO - 16:26:18: Objective: -0.4616945509400915
INFO - 16:26:18: Standardized constraints:
INFO - 16:26:18: g_1 = [-0.03455648 -0.04761523 -0.05617801 -0.06196637 -0.0660964 -0.11090577
INFO - 16:26:18: -0.12909423]
INFO - 16:26:18: Design space:
INFO - 16:26:18: +--------+-------------+-------+-------------+-------+
INFO - 16:26:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:18: +--------+-------------+-------+-------------+-------+
INFO - 16:26:18: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:26:18: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:18: +--------+-------------+-------+-------------+-------+
INFO - 16:26:18: *** End StructureScenario execution (time: 0:00:00.017669) ***
INFO - 16:26:18: ... 80%|████████ | 40/50 [00:10<00:02, 3.93 it/sec, obj=-3.49e+3]
INFO - 16:26:18:
INFO - 16:26:18: *** Start PropulsionScenario execution ***
INFO - 16:26:18: PropulsionScenario
INFO - 16:26:18: Disciplines: SobieskiPropulsion
INFO - 16:26:18: MDO formulation: DisciplinaryOpt
INFO - 16:26:18: Optimization problem:
INFO - 16:26:18: minimize y_34(x_3)
INFO - 16:26:18: with respect to x_3
INFO - 16:26:18: subject to constraints:
INFO - 16:26:18: g_3(x_3) <= 0.0
INFO - 16:26:18: over the design space:
INFO - 16:26:18: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:18: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:18: | x_3 | 0.1 | 0.1574985677093928 | 1 | float |
INFO - 16:26:18: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:18: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:18: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:18:
INFO - 16:26:18: ... 3%|▎ | 1/30 [00:00<00:00, 1760.83 it/sec, obj=0.929]
INFO - 16:26:18:
INFO - 16:26:18: ... 7%|▋ | 2/30 [00:00<00:00, 447.34 it/sec, obj=0.929]
INFO - 16:26:18:
INFO - 16:26:18: ... 10%|█ | 3/30 [00:00<00:00, 501.75 it/sec, obj=0.929]
INFO - 16:26:18:
INFO - 16:26:18: ... 13%|█▎ | 4/30 [00:00<00:00, 429.95 it/sec, obj=0.929]
INFO - 16:26:18:
INFO - 16:26:18: ... 17%|█▋ | 5/30 [00:00<00:00, 400.50 it/sec, obj=0.929]
INFO - 16:26:18:
INFO - 16:26:18: ... 20%|██ | 6/30 [00:00<00:00, 355.53 it/sec, obj=0.929]
INFO - 16:26:18:
INFO - 16:26:18:
INFO - 16:26:18: Optimization result:
INFO - 16:26:18: Optimizer info:
INFO - 16:26:18: Status: None
INFO - 16:26:18: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:26:18: Number of calls to the objective function by the optimizer: 9
INFO - 16:26:18: Solution:
INFO - 16:26:18: The solution is feasible.
INFO - 16:26:18: Objective: 0.9291209237383229
INFO - 16:26:18: Standardized constraints:
INFO - 16:26:18: g_3 = [-8.64299916e-01 -1.35700084e-01 -5.55111512e-16 -1.82416948e-01]
INFO - 16:26:18: Design space:
INFO - 16:26:18: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:18: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:18: | x_3 | 0.1 | 0.1571345165752399 | 1 | float |
INFO - 16:26:18: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:18: *** End PropulsionScenario execution (time: 0:00:00.028894) ***
INFO - 16:26:18:
INFO - 16:26:18: *** Start AerodynamicsScenario execution ***
INFO - 16:26:18: AerodynamicsScenario
INFO - 16:26:18: Disciplines: SobieskiAerodynamics
INFO - 16:26:18: MDO formulation: DisciplinaryOpt
INFO - 16:26:18: Optimization problem:
INFO - 16:26:18: minimize -y_24(x_2)
INFO - 16:26:18: with respect to x_2
INFO - 16:26:18: subject to constraints:
INFO - 16:26:18: g_2(x_2) <= 0.0
INFO - 16:26:18: over the design space:
INFO - 16:26:18: +------+-------------+-------+-------------+-------+
INFO - 16:26:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:18: +------+-------------+-------+-------------+-------+
INFO - 16:26:18: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:18: +------+-------------+-------+-------------+-------+
INFO - 16:26:18: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:18: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:18:
INFO - 16:26:18: ... 3%|▎ | 1/30 [00:00<00:00, 877.29 it/sec, obj=-8.52]
INFO - 16:26:18:
INFO - 16:26:18:
INFO - 16:26:18: Optimization result:
INFO - 16:26:18: Optimizer info:
INFO - 16:26:18: Status: 8
INFO - 16:26:18: Message: Positive directional derivative for linesearch
INFO - 16:26:18: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:18: Solution:
INFO - 16:26:18: The solution is feasible.
INFO - 16:26:18: Objective: -8.524344288759739
INFO - 16:26:18: Standardized constraints:
INFO - 16:26:18: g_2 = 0.0
INFO - 16:26:18: Design space:
INFO - 16:26:18: +------+-------------+-------+-------------+-------+
INFO - 16:26:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:18: +------+-------------+-------+-------------+-------+
INFO - 16:26:18: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:18: +------+-------------+-------+-------------+-------+
INFO - 16:26:18: *** End AerodynamicsScenario execution (time: 0:00:00.015226) ***
INFO - 16:26:18:
INFO - 16:26:18: *** Start StructureScenario execution ***
INFO - 16:26:18: StructureScenario
INFO - 16:26:18: Disciplines: SobieskiStructure
INFO - 16:26:18: MDO formulation: DisciplinaryOpt
INFO - 16:26:18: Optimization problem:
INFO - 16:26:18: minimize -y_11(x_1)
INFO - 16:26:18: with respect to x_1
INFO - 16:26:18: subject to constraints:
INFO - 16:26:18: g_1(x_1) <= 0.0
INFO - 16:26:18: over the design space:
INFO - 16:26:18: +--------+-------------+-------+-------------+-------+
INFO - 16:26:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:18: +--------+-------------+-------+-------------+-------+
INFO - 16:26:18: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:26:18: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:18: +--------+-------------+-------+-------------+-------+
INFO - 16:26:18: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:18: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:18:
INFO - 16:26:18: ... 3%|▎ | 1/30 [00:00<00:00, 527.06 it/sec, obj=-.487]
INFO - 16:26:18:
INFO - 16:26:18:
INFO - 16:26:18: Optimization result:
INFO - 16:26:18: Optimizer info:
INFO - 16:26:18: Status: 8
INFO - 16:26:18: Message: Positive directional derivative for linesearch
INFO - 16:26:18: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:18: Solution:
INFO - 16:26:18: The solution is feasible.
INFO - 16:26:18: Objective: -0.4874748532397074
INFO - 16:26:18: Standardized constraints:
INFO - 16:26:18: g_1 = [-0.03355014 -0.04667611 -0.05537309 -0.06127416 -0.06549273 -0.11684417
INFO - 16:26:18: -0.12315583]
INFO - 16:26:18: Design space:
INFO - 16:26:18: +--------+-------------+-------+-------------+-------+
INFO - 16:26:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:18: +--------+-------------+-------+-------------+-------+
INFO - 16:26:18: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:26:18: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:18: +--------+-------------+-------+-------------+-------+
INFO - 16:26:18: *** End StructureScenario execution (time: 0:00:00.018356) ***
INFO - 16:26:18: ... 82%|████████▏ | 41/50 [00:10<00:02, 3.96 it/sec, obj=-3.61e+3]
INFO - 16:26:18:
INFO - 16:26:18: *** Start PropulsionScenario execution ***
INFO - 16:26:18: PropulsionScenario
INFO - 16:26:18: Disciplines: SobieskiPropulsion
INFO - 16:26:18: MDO formulation: DisciplinaryOpt
INFO - 16:26:18: Optimization problem:
INFO - 16:26:18: minimize y_34(x_3)
INFO - 16:26:18: with respect to x_3
INFO - 16:26:18: subject to constraints:
INFO - 16:26:18: g_3(x_3) <= 0.0
INFO - 16:26:18: over the design space:
INFO - 16:26:18: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:18: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:18: | x_3 | 0.1 | 0.1571345165752399 | 1 | float |
INFO - 16:26:18: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:18: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:18: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:18:
INFO - 16:26:18: ... 3%|▎ | 1/30 [00:00<00:00, 1787.85 it/sec, obj=0.924]
INFO - 16:26:18:
INFO - 16:26:18: ... 7%|▋ | 2/30 [00:00<00:00, 459.20 it/sec, obj=0.924]
INFO - 16:26:18:
INFO - 16:26:18: ... 10%|█ | 3/30 [00:00<00:00, 516.77 it/sec, obj=0.924]
INFO - 16:26:18:
INFO - 16:26:18: ... 13%|█▎ | 4/30 [00:00<00:00, 438.94 it/sec, obj=0.924]
INFO - 16:26:18:
INFO - 16:26:18: ... 17%|█▋ | 5/30 [00:00<00:00, 393.66 it/sec, obj=0.924]
INFO - 16:26:18:
INFO - 16:26:18: ... 20%|██ | 6/30 [00:00<00:00, 375.65 it/sec, obj=0.924]
INFO - 16:26:18:
INFO - 16:26:18:
INFO - 16:26:18: Optimization result:
INFO - 16:26:18: Optimizer info:
INFO - 16:26:18: Status: None
INFO - 16:26:18: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:26:18: Number of calls to the objective function by the optimizer: 7
INFO - 16:26:18: Solution:
INFO - 16:26:18: The solution is feasible.
INFO - 16:26:18: Objective: 0.9239330847904542
INFO - 16:26:18: Standardized constraints:
INFO - 16:26:18: g_3 = [-8.37019009e-01 -1.62980991e-01 2.22044605e-16 -1.83255000e-01]
INFO - 16:26:18: Design space:
INFO - 16:26:18: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:18: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:18: | x_3 | 0.1 | 0.1562447456462875 | 1 | float |
INFO - 16:26:18: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:18: *** End PropulsionScenario execution (time: 0:00:00.028020) ***
INFO - 16:26:18:
INFO - 16:26:18: *** Start AerodynamicsScenario execution ***
INFO - 16:26:18: AerodynamicsScenario
INFO - 16:26:18: Disciplines: SobieskiAerodynamics
INFO - 16:26:18: MDO formulation: DisciplinaryOpt
INFO - 16:26:18: Optimization problem:
INFO - 16:26:18: minimize -y_24(x_2)
INFO - 16:26:18: with respect to x_2
INFO - 16:26:18: subject to constraints:
INFO - 16:26:18: g_2(x_2) <= 0.0
INFO - 16:26:18: over the design space:
INFO - 16:26:18: +------+-------------+-------+-------------+-------+
INFO - 16:26:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:18: +------+-------------+-------+-------------+-------+
INFO - 16:26:18: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:18: +------+-------------+-------+-------------+-------+
INFO - 16:26:18: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:18: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:18:
INFO - 16:26:18: ... 3%|▎ | 1/30 [00:00<00:00, 947.22 it/sec, obj=-8.41]
INFO - 16:26:18:
INFO - 16:26:18:
INFO - 16:26:18: Optimization result:
INFO - 16:26:18: Optimizer info:
INFO - 16:26:18: Status: 8
INFO - 16:26:18: Message: Positive directional derivative for linesearch
INFO - 16:26:18: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:18: Solution:
INFO - 16:26:18: The solution is feasible.
INFO - 16:26:18: Objective: -8.40928318533125
INFO - 16:26:18: Standardized constraints:
INFO - 16:26:18: g_2 = -2.220446049250313e-16
INFO - 16:26:18: Design space:
INFO - 16:26:18: +------+-------------+-------+-------------+-------+
INFO - 16:26:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:18: +------+-------------+-------+-------------+-------+
INFO - 16:26:18: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:18: +------+-------------+-------+-------------+-------+
INFO - 16:26:18: *** End AerodynamicsScenario execution (time: 0:00:00.014968) ***
INFO - 16:26:18:
INFO - 16:26:18: *** Start StructureScenario execution ***
INFO - 16:26:18: StructureScenario
INFO - 16:26:18: Disciplines: SobieskiStructure
INFO - 16:26:18: MDO formulation: DisciplinaryOpt
INFO - 16:26:18: Optimization problem:
INFO - 16:26:18: minimize -y_11(x_1)
INFO - 16:26:18: with respect to x_1
INFO - 16:26:18: subject to constraints:
INFO - 16:26:18: g_1(x_1) <= 0.0
INFO - 16:26:18: over the design space:
INFO - 16:26:18: +--------+-------------+-------+-------------+-------+
INFO - 16:26:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:18: +--------+-------------+-------+-------------+-------+
INFO - 16:26:18: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:26:18: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:18: +--------+-------------+-------+-------------+-------+
INFO - 16:26:18: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:18: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:18:
INFO - 16:26:18: ... 3%|▎ | 1/30 [00:00<00:00, 555.54 it/sec, obj=-.511]
INFO - 16:26:18:
INFO - 16:26:18:
INFO - 16:26:18: Optimization result:
INFO - 16:26:18: Optimizer info:
INFO - 16:26:18: Status: 8
INFO - 16:26:18: Message: Positive directional derivative for linesearch
INFO - 16:26:18: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:18: Solution:
INFO - 16:26:18: The solution is feasible.
INFO - 16:26:18: Objective: -0.5111186441664538
INFO - 16:26:18: Standardized constraints:
INFO - 16:26:18: g_1 = [-0.02882855 -0.04261322 -0.05198274 -0.05839714 -0.0630037 -0.12290518
INFO - 16:26:18: -0.11709482]
INFO - 16:26:18: Design space:
INFO - 16:26:18: +--------+-------------+-------+-------------+-------+
INFO - 16:26:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:18: +--------+-------------+-------+-------------+-------+
INFO - 16:26:18: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:26:18: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:18: +--------+-------------+-------+-------------+-------+
INFO - 16:26:18: *** End StructureScenario execution (time: 0:00:00.017947) ***
INFO - 16:26:18: ... 84%|████████▍ | 42/50 [00:10<00:02, 3.99 it/sec, obj=-3.74e+3]
INFO - 16:26:18:
INFO - 16:26:18: *** Start PropulsionScenario execution ***
INFO - 16:26:18: PropulsionScenario
INFO - 16:26:18: Disciplines: SobieskiPropulsion
INFO - 16:26:18: MDO formulation: DisciplinaryOpt
INFO - 16:26:18: Optimization problem:
INFO - 16:26:18: minimize y_34(x_3)
INFO - 16:26:18: with respect to x_3
INFO - 16:26:18: subject to constraints:
INFO - 16:26:18: g_3(x_3) <= 0.0
INFO - 16:26:18: over the design space:
INFO - 16:26:18: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:18: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:18: | x_3 | 0.1 | 0.1562447456462875 | 1 | float |
INFO - 16:26:18: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:18: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:18: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:18:
INFO - 16:26:18: ... 3%|▎ | 1/30 [00:00<00:00, 1738.93 it/sec, obj=0.924]
INFO - 16:26:18:
INFO - 16:26:18: ... 7%|▋ | 2/30 [00:00<00:00, 458.52 it/sec, obj=0.924]
INFO - 16:26:18:
INFO - 16:26:18: ... 10%|█ | 3/30 [00:00<00:00, 426.19 it/sec, obj=0.924]
INFO - 16:26:18:
INFO - 16:26:18: ... 13%|█▎ | 4/30 [00:00<00:00, 390.49 it/sec, obj=0.924]
INFO - 16:26:18:
INFO - 16:26:18:
INFO - 16:26:18: Optimization result:
INFO - 16:26:18: Optimizer info:
INFO - 16:26:18: Status: None
INFO - 16:26:18: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:26:18: Number of calls to the objective function by the optimizer: 6
INFO - 16:26:18: Solution:
INFO - 16:26:18: The solution is feasible.
INFO - 16:26:18: Objective: 0.9242579255616262
INFO - 16:26:18: Standardized constraints:
INFO - 16:26:18: g_3 = [-8.06358813e-01 -1.93641187e-01 -2.22044605e-16 -1.83202942e-01]
INFO - 16:26:18: Design space:
INFO - 16:26:18: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:18: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:18: | x_3 | 0.1 | 0.1562997391816728 | 1 | float |
INFO - 16:26:18: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:18: *** End PropulsionScenario execution (time: 0:00:00.022433) ***
INFO - 16:26:18:
INFO - 16:26:18: *** Start AerodynamicsScenario execution ***
INFO - 16:26:18: AerodynamicsScenario
INFO - 16:26:18: Disciplines: SobieskiAerodynamics
INFO - 16:26:18: MDO formulation: DisciplinaryOpt
INFO - 16:26:18: Optimization problem:
INFO - 16:26:18: minimize -y_24(x_2)
INFO - 16:26:18: with respect to x_2
INFO - 16:26:18: subject to constraints:
INFO - 16:26:18: g_2(x_2) <= 0.0
INFO - 16:26:18: over the design space:
INFO - 16:26:18: +------+-------------+-------+-------------+-------+
INFO - 16:26:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:18: +------+-------------+-------+-------------+-------+
INFO - 16:26:18: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:18: +------+-------------+-------+-------------+-------+
INFO - 16:26:18: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:18: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:18:
INFO - 16:26:18: ... 3%|▎ | 1/30 [00:00<00:00, 978.38 it/sec, obj=-8.25]
INFO - 16:26:18:
INFO - 16:26:18:
INFO - 16:26:18: Optimization result:
INFO - 16:26:18: Optimizer info:
INFO - 16:26:18: Status: 8
INFO - 16:26:18: Message: Positive directional derivative for linesearch
INFO - 16:26:18: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:18: Solution:
INFO - 16:26:18: The solution is feasible.
INFO - 16:26:18: Objective: -8.245675787683204
INFO - 16:26:18: Standardized constraints:
INFO - 16:26:18: g_2 = 0.0
INFO - 16:26:18: Design space:
INFO - 16:26:18: +------+-------------+-------+-------------+-------+
INFO - 16:26:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:18: +------+-------------+-------+-------------+-------+
INFO - 16:26:18: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:18: +------+-------------+-------+-------------+-------+
INFO - 16:26:18: *** End AerodynamicsScenario execution (time: 0:00:00.014684) ***
INFO - 16:26:18:
INFO - 16:26:18: *** Start StructureScenario execution ***
INFO - 16:26:18: StructureScenario
INFO - 16:26:18: Disciplines: SobieskiStructure
INFO - 16:26:18: MDO formulation: DisciplinaryOpt
INFO - 16:26:18: Optimization problem:
INFO - 16:26:18: minimize -y_11(x_1)
INFO - 16:26:18: with respect to x_1
INFO - 16:26:18: subject to constraints:
INFO - 16:26:18: g_1(x_1) <= 0.0
INFO - 16:26:18: over the design space:
INFO - 16:26:18: +--------+-------------+-------+-------------+-------+
INFO - 16:26:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:18: +--------+-------------+-------+-------------+-------+
INFO - 16:26:18: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:26:18: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:18: +--------+-------------+-------+-------------+-------+
INFO - 16:26:18: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:18: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:18:
INFO - 16:26:18: ... 3%|▎ | 1/30 [00:00<00:00, 584.16 it/sec, obj=-.535]
INFO - 16:26:18:
INFO - 16:26:18:
INFO - 16:26:18: Optimization result:
INFO - 16:26:18: Optimizer info:
INFO - 16:26:18: Status: 8
INFO - 16:26:18: Message: Positive directional derivative for linesearch
INFO - 16:26:18: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:18: Solution:
INFO - 16:26:18: The solution is feasible.
INFO - 16:26:18: Objective: -0.5352742247678798
INFO - 16:26:18: Standardized constraints:
INFO - 16:26:18: g_1 = [-0.0240533 -0.03850415 -0.04855384 -0.05548742 -0.06048638 -0.12916226
INFO - 16:26:18: -0.11083774]
INFO - 16:26:18: Design space:
INFO - 16:26:18: +--------+-------------+-------+-------------+-------+
INFO - 16:26:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:18: +--------+-------------+-------+-------------+-------+
INFO - 16:26:18: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:26:18: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:18: +--------+-------------+-------+-------------+-------+
INFO - 16:26:18: *** End StructureScenario execution (time: 0:00:00.017785) ***
WARNING - 16:26:18: MDAJacobi has reached its maximum number of iterations but the normed residual 2.6870836615612218e-14 is still above the tolerance 1e-14.
INFO - 16:26:18: ... 86%|████████▌ | 43/50 [00:10<00:01, 3.99 it/sec, obj=-3.83e+3]
INFO - 16:26:18:
INFO - 16:26:18: *** Start PropulsionScenario execution ***
INFO - 16:26:18: PropulsionScenario
INFO - 16:26:18: Disciplines: SobieskiPropulsion
INFO - 16:26:18: MDO formulation: DisciplinaryOpt
INFO - 16:26:18: Optimization problem:
INFO - 16:26:18: minimize y_34(x_3)
INFO - 16:26:18: with respect to x_3
INFO - 16:26:18: subject to constraints:
INFO - 16:26:18: g_3(x_3) <= 0.0
INFO - 16:26:18: over the design space:
INFO - 16:26:18: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:18: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:18: | x_3 | 0.1 | 0.1562997391816728 | 1 | float |
INFO - 16:26:18: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:18: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:18: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:18:
INFO - 16:26:18: ... 3%|▎ | 1/30 [00:00<00:00, 1832.37 it/sec, obj=0.925]
INFO - 16:26:18:
INFO - 16:26:18: ... 7%|▋ | 2/30 [00:00<00:00, 464.18 it/sec, obj=0.925]
INFO - 16:26:18:
INFO - 16:26:18: ... 10%|█ | 3/30 [00:00<00:00, 430.32 it/sec, obj=0.925]
INFO - 16:26:18:
INFO - 16:26:18: ... 13%|█▎ | 4/30 [00:00<00:00, 391.91 it/sec, obj=0.925]
INFO - 16:26:18:
INFO - 16:26:18:
INFO - 16:26:18: Optimization result:
INFO - 16:26:18: Optimizer info:
INFO - 16:26:18: Status: None
INFO - 16:26:18: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:26:18: Number of calls to the objective function by the optimizer: 5
INFO - 16:26:18: Solution:
INFO - 16:26:18: The solution is feasible.
INFO - 16:26:18: Objective: 0.9245825775735912
INFO - 16:26:18: Standardized constraints:
INFO - 16:26:18: g_3 = [-0.77653749 -0.22346251 0. -0.18315086]
INFO - 16:26:18: Design space:
INFO - 16:26:18: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:18: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:18: | x_3 | 0.1 | 0.1563547960529718 | 1 | float |
INFO - 16:26:18: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:18: *** End PropulsionScenario execution (time: 0:00:00.022049) ***
INFO - 16:26:18:
INFO - 16:26:18: *** Start AerodynamicsScenario execution ***
INFO - 16:26:18: AerodynamicsScenario
INFO - 16:26:18: Disciplines: SobieskiAerodynamics
INFO - 16:26:18: MDO formulation: DisciplinaryOpt
INFO - 16:26:18: Optimization problem:
INFO - 16:26:18: minimize -y_24(x_2)
INFO - 16:26:18: with respect to x_2
INFO - 16:26:18: subject to constraints:
INFO - 16:26:18: g_2(x_2) <= 0.0
INFO - 16:26:18: over the design space:
INFO - 16:26:18: +------+-------------+-------+-------------+-------+
INFO - 16:26:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:18: +------+-------------+-------+-------------+-------+
INFO - 16:26:18: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:18: +------+-------------+-------+-------------+-------+
INFO - 16:26:18: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:18: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:18:
INFO - 16:26:18: ... 3%|▎ | 1/30 [00:00<00:00, 990.16 it/sec, obj=-8.09]
INFO - 16:26:18:
INFO - 16:26:18:
INFO - 16:26:18: Optimization result:
INFO - 16:26:18: Optimizer info:
INFO - 16:26:18: Status: 8
INFO - 16:26:18: Message: Positive directional derivative for linesearch
INFO - 16:26:18: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:18: Solution:
INFO - 16:26:18: The solution is feasible.
INFO - 16:26:18: Objective: -8.090286763121995
INFO - 16:26:18: Standardized constraints:
INFO - 16:26:18: g_2 = -0.0005367768756145974
INFO - 16:26:18: Design space:
INFO - 16:26:18: +------+-------------+-------+-------------+-------+
INFO - 16:26:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:18: +------+-------------+-------+-------------+-------+
INFO - 16:26:18: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:18: +------+-------------+-------+-------------+-------+
INFO - 16:26:18: *** End AerodynamicsScenario execution (time: 0:00:00.014582) ***
INFO - 16:26:18:
INFO - 16:26:18: *** Start StructureScenario execution ***
INFO - 16:26:18: StructureScenario
INFO - 16:26:18: Disciplines: SobieskiStructure
INFO - 16:26:18: MDO formulation: DisciplinaryOpt
INFO - 16:26:18: Optimization problem:
INFO - 16:26:18: minimize -y_11(x_1)
INFO - 16:26:18: with respect to x_1
INFO - 16:26:18: subject to constraints:
INFO - 16:26:18: g_1(x_1) <= 0.0
INFO - 16:26:18: over the design space:
INFO - 16:26:18: +--------+-------------+-------+-------------+-------+
INFO - 16:26:18: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:18: +--------+-------------+-------+-------------+-------+
INFO - 16:26:18: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:26:18: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:18: +--------+-------------+-------+-------------+-------+
INFO - 16:26:18: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:18: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:18:
INFO - 16:26:19: ... 3%|▎ | 1/30 [00:00<00:00, 429.66 it/sec, obj=-.559]
INFO - 16:26:19:
INFO - 16:26:19:
INFO - 16:26:19: Optimization result:
INFO - 16:26:19: Optimizer info:
INFO - 16:26:19: Status: 8
INFO - 16:26:19: Message: Positive directional derivative for linesearch
INFO - 16:26:19: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:19: Solution:
INFO - 16:26:19: The solution is feasible.
INFO - 16:26:19: Objective: -0.5587075920181674
INFO - 16:26:19: Standardized constraints:
INFO - 16:26:19: g_1 = [-0.01779649 -0.03333325 -0.04430079 -0.05190504 -0.05740109 -0.13540454
INFO - 16:26:19: -0.10459546]
INFO - 16:26:19: Design space:
INFO - 16:26:19: +--------+-------------+-------+-------------+-------+
INFO - 16:26:19: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:19: +--------+-------------+-------+-------------+-------+
INFO - 16:26:19: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:26:19: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:19: +--------+-------------+-------+-------------+-------+
INFO - 16:26:19: *** End StructureScenario execution (time: 0:00:00.018037) ***
INFO - 16:26:19: ... 88%|████████▊ | 44/50 [00:10<00:01, 4.02 it/sec, obj=-3.92e+3]
WARNING - 16:26:19: MDAJacobi has reached its maximum number of iterations but the normed residual 1.9529185111762908e-14 is still above the tolerance 1e-14.
INFO - 16:26:19:
INFO - 16:26:19: *** Start PropulsionScenario execution ***
INFO - 16:26:19: PropulsionScenario
INFO - 16:26:19: Disciplines: SobieskiPropulsion
INFO - 16:26:19: MDO formulation: DisciplinaryOpt
INFO - 16:26:19: Optimization problem:
INFO - 16:26:19: minimize y_34(x_3)
INFO - 16:26:19: with respect to x_3
INFO - 16:26:19: subject to constraints:
INFO - 16:26:19: g_3(x_3) <= 0.0
INFO - 16:26:19: over the design space:
INFO - 16:26:19: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:19: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:19: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:19: | x_3 | 0.1 | 0.1563547960529718 | 1 | float |
INFO - 16:26:19: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:19: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:19: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:19:
INFO - 16:26:19: ... 3%|▎ | 1/30 [00:00<00:00, 1093.12 it/sec, obj=0.941]
INFO - 16:26:19:
INFO - 16:26:19: ... 7%|▋ | 2/30 [00:00<00:00, 398.60 it/sec, obj=0.94]
INFO - 16:26:19:
INFO - 16:26:19: ... 10%|█ | 3/30 [00:00<00:00, 387.29 it/sec, obj=0.94]
INFO - 16:26:19:
INFO - 16:26:19: ... 13%|█▎ | 4/30 [00:00<00:00, 407.79 it/sec, obj=0.94]
INFO - 16:26:19:
INFO - 16:26:19:
INFO - 16:26:19: Optimization result:
INFO - 16:26:19: Optimizer info:
INFO - 16:26:19: Status: None
INFO - 16:26:19: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:26:19: Number of calls to the objective function by the optimizer: 5
INFO - 16:26:19: Solution:
INFO - 16:26:19: The solution is feasible.
INFO - 16:26:19: Objective: 0.9395403913767254
INFO - 16:26:19: Standardized constraints:
INFO - 16:26:19: g_3 = [-7.59311208e-01 -2.40688792e-01 -3.33066907e-16 -1.80689397e-01]
INFO - 16:26:19: Design space:
INFO - 16:26:19: +------+-------------+-------------------+-------------+-------+
INFO - 16:26:19: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:19: +------+-------------+-------------------+-------------+-------+
INFO - 16:26:19: | x_3 | 0.1 | 0.158997979896411 | 1 | float |
INFO - 16:26:19: +------+-------------+-------------------+-------------+-------+
INFO - 16:26:19: *** End PropulsionScenario execution (time: 0:00:00.021725) ***
INFO - 16:26:19:
INFO - 16:26:19: *** Start AerodynamicsScenario execution ***
INFO - 16:26:19: AerodynamicsScenario
INFO - 16:26:19: Disciplines: SobieskiAerodynamics
INFO - 16:26:19: MDO formulation: DisciplinaryOpt
INFO - 16:26:19: Optimization problem:
INFO - 16:26:19: minimize -y_24(x_2)
INFO - 16:26:19: with respect to x_2
INFO - 16:26:19: subject to constraints:
INFO - 16:26:19: g_2(x_2) <= 0.0
INFO - 16:26:19: over the design space:
INFO - 16:26:19: +------+-------------+-------+-------------+-------+
INFO - 16:26:19: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:19: +------+-------------+-------+-------------+-------+
INFO - 16:26:19: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:19: +------+-------------+-------+-------------+-------+
INFO - 16:26:19: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:19: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:19:
INFO - 16:26:19: ... 3%|▎ | 1/30 [00:00<00:00, 888.44 it/sec, obj=-7.88]
INFO - 16:26:19:
INFO - 16:26:19:
INFO - 16:26:19: Optimization result:
INFO - 16:26:19: Optimizer info:
INFO - 16:26:19: Status: 8
INFO - 16:26:19: Message: Positive directional derivative for linesearch
INFO - 16:26:19: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:19: Solution:
INFO - 16:26:19: The solution is feasible.
INFO - 16:26:19: Objective: -7.881056817731116
INFO - 16:26:19: Standardized constraints:
INFO - 16:26:19: g_2 = -1.3322676295501878e-15
INFO - 16:26:19: Design space:
INFO - 16:26:19: +------+-------------+-------+-------------+-------+
INFO - 16:26:19: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:19: +------+-------------+-------+-------------+-------+
INFO - 16:26:19: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:19: +------+-------------+-------+-------------+-------+
INFO - 16:26:19: *** End AerodynamicsScenario execution (time: 0:00:00.015089) ***
INFO - 16:26:19:
INFO - 16:26:19: *** Start StructureScenario execution ***
INFO - 16:26:19: StructureScenario
INFO - 16:26:19: Disciplines: SobieskiStructure
INFO - 16:26:19: MDO formulation: DisciplinaryOpt
INFO - 16:26:19: Optimization problem:
INFO - 16:26:19: minimize -y_11(x_1)
INFO - 16:26:19: with respect to x_1
INFO - 16:26:19: subject to constraints:
INFO - 16:26:19: g_1(x_1) <= 0.0
INFO - 16:26:19: over the design space:
INFO - 16:26:19: +--------+-------------+-------+-------------+-------+
INFO - 16:26:19: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:19: +--------+-------------+-------+-------------+-------+
INFO - 16:26:19: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:26:19: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:19: +--------+-------------+-------+-------------+-------+
INFO - 16:26:19: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:19: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:19:
INFO - 16:26:19: ... 3%|▎ | 1/30 [00:00<00:00, 520.58 it/sec, obj=-.565]
INFO - 16:26:19:
INFO - 16:26:19:
INFO - 16:26:19: Optimization result:
INFO - 16:26:19: Optimizer info:
INFO - 16:26:19: Status: 8
INFO - 16:26:19: Message: Positive directional derivative for linesearch
INFO - 16:26:19: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:19: Solution:
INFO - 16:26:19: The solution is feasible.
INFO - 16:26:19: Objective: -0.5650313664677667
INFO - 16:26:19: Standardized constraints:
INFO - 16:26:19: g_1 = [-0.01805093 -0.03333915 -0.04424381 -0.05182998 -0.05732217 -0.13720865
INFO - 16:26:19: -0.10279135]
INFO - 16:26:19: Design space:
INFO - 16:26:19: +--------+-------------+-------+-------------+-------+
INFO - 16:26:19: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:19: +--------+-------------+-------+-------------+-------+
INFO - 16:26:19: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:26:19: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:19: +--------+-------------+-------+-------------+-------+
INFO - 16:26:19: *** End StructureScenario execution (time: 0:00:00.018261) ***
INFO - 16:26:19: ... 90%|█████████ | 45/50 [00:11<00:01, 4.01 it/sec, obj=-3.84e+3]
INFO - 16:26:19:
INFO - 16:26:19: *** Start PropulsionScenario execution ***
INFO - 16:26:19: PropulsionScenario
INFO - 16:26:19: Disciplines: SobieskiPropulsion
INFO - 16:26:19: MDO formulation: DisciplinaryOpt
INFO - 16:26:19: Optimization problem:
INFO - 16:26:19: minimize y_34(x_3)
INFO - 16:26:19: with respect to x_3
INFO - 16:26:19: subject to constraints:
INFO - 16:26:19: g_3(x_3) <= 0.0
INFO - 16:26:19: over the design space:
INFO - 16:26:19: +------+-------------+-------------------+-------------+-------+
INFO - 16:26:19: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:19: +------+-------------+-------------------+-------------+-------+
INFO - 16:26:19: | x_3 | 0.1 | 0.158997979896411 | 1 | float |
INFO - 16:26:19: +------+-------------+-------------------+-------------+-------+
INFO - 16:26:19: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:19: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:19:
INFO - 16:26:19: ... 3%|▎ | 1/30 [00:00<00:00, 1712.66 it/sec, obj=0.931]
INFO - 16:26:19:
INFO - 16:26:19: ... 7%|▋ | 2/30 [00:00<00:00, 454.49 it/sec, obj=0.932]
INFO - 16:26:19:
INFO - 16:26:19: ... 10%|█ | 3/30 [00:00<00:00, 506.29 it/sec, obj=0.931]
INFO - 16:26:19:
INFO - 16:26:19: ... 13%|█▎ | 4/30 [00:00<00:00, 433.71 it/sec, obj=0.932]
INFO - 16:26:19:
INFO - 16:26:19: ... 17%|█▋ | 5/30 [00:00<00:00, 403.00 it/sec, obj=0.932]
INFO - 16:26:19:
INFO - 16:26:19: ... 20%|██ | 6/30 [00:00<00:00, 382.77 it/sec, obj=0.932]
INFO - 16:26:19:
INFO - 16:26:19:
INFO - 16:26:19: Optimization result:
INFO - 16:26:19: Optimizer info:
INFO - 16:26:19: Status: None
INFO - 16:26:19: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:26:19: Number of calls to the objective function by the optimizer: 7
INFO - 16:26:19: Solution:
INFO - 16:26:19: The solution is feasible.
INFO - 16:26:19: Objective: 0.9315946152265382
INFO - 16:26:19: Standardized constraints:
INFO - 16:26:19: g_3 = [-0.76129699 -0.23870301 0. -0.18315086]
INFO - 16:26:19: Design space:
INFO - 16:26:19: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:19: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:19: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:19: | x_3 | 0.1 | 0.1585858914922077 | 1 | float |
INFO - 16:26:19: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:19: *** End PropulsionScenario execution (time: 0:00:00.027824) ***
INFO - 16:26:19:
INFO - 16:26:19: *** Start AerodynamicsScenario execution ***
INFO - 16:26:19: AerodynamicsScenario
INFO - 16:26:19: Disciplines: SobieskiAerodynamics
INFO - 16:26:19: MDO formulation: DisciplinaryOpt
INFO - 16:26:19: Optimization problem:
INFO - 16:26:19: minimize -y_24(x_2)
INFO - 16:26:19: with respect to x_2
INFO - 16:26:19: subject to constraints:
INFO - 16:26:19: g_2(x_2) <= 0.0
INFO - 16:26:19: over the design space:
INFO - 16:26:19: +------+-------------+-------+-------------+-------+
INFO - 16:26:19: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:19: +------+-------------+-------+-------------+-------+
INFO - 16:26:19: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:19: +------+-------------+-------+-------------+-------+
INFO - 16:26:19: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:19: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:19:
INFO - 16:26:19: ... 3%|▎ | 1/30 [00:00<00:00, 884.50 it/sec, obj=-7.89]
INFO - 16:26:19:
INFO - 16:26:19:
INFO - 16:26:19: Optimization result:
INFO - 16:26:19: Optimizer info:
INFO - 16:26:19: Status: 8
INFO - 16:26:19: Message: Positive directional derivative for linesearch
INFO - 16:26:19: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:19: Solution:
INFO - 16:26:19: The solution is feasible.
INFO - 16:26:19: Objective: -7.890870198092076
INFO - 16:26:19: Standardized constraints:
INFO - 16:26:19: g_2 = -0.0005367768756145974
INFO - 16:26:19: Design space:
INFO - 16:26:19: +------+-------------+-------+-------------+-------+
INFO - 16:26:19: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:19: +------+-------------+-------+-------------+-------+
INFO - 16:26:19: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:19: +------+-------------+-------+-------------+-------+
INFO - 16:26:19: *** End AerodynamicsScenario execution (time: 0:00:00.015045) ***
INFO - 16:26:19:
INFO - 16:26:19: *** Start StructureScenario execution ***
INFO - 16:26:19: StructureScenario
INFO - 16:26:19: Disciplines: SobieskiStructure
INFO - 16:26:19: MDO formulation: DisciplinaryOpt
INFO - 16:26:19: Optimization problem:
INFO - 16:26:19: minimize -y_11(x_1)
INFO - 16:26:19: with respect to x_1
INFO - 16:26:19: subject to constraints:
INFO - 16:26:19: g_1(x_1) <= 0.0
INFO - 16:26:19: over the design space:
INFO - 16:26:19: +--------+-------------+-------+-------------+-------+
INFO - 16:26:19: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:19: +--------+-------------+-------+-------------+-------+
INFO - 16:26:19: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:26:19: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:19: +--------+-------------+-------+-------------+-------+
INFO - 16:26:19: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:19: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:19:
INFO - 16:26:19: ... 3%|▎ | 1/30 [00:00<00:00, 567.41 it/sec, obj=-.551]
INFO - 16:26:19:
INFO - 16:26:19:
INFO - 16:26:19: Optimization result:
INFO - 16:26:19: Optimizer info:
INFO - 16:26:19: Status: 8
INFO - 16:26:19: Message: Positive directional derivative for linesearch
INFO - 16:26:19: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:19: Solution:
INFO - 16:26:19: The solution is feasible.
INFO - 16:26:19: Objective: -0.5507642457519094
INFO - 16:26:19: Standardized constraints:
INFO - 16:26:19: g_1 = [-0.01779649 -0.03333325 -0.04430079 -0.05190504 -0.05740109 -0.13540454
INFO - 16:26:19: -0.10459546]
INFO - 16:26:19: Design space:
INFO - 16:26:19: +--------+-------------+-------+-------------+-------+
INFO - 16:26:19: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:19: +--------+-------------+-------+-------------+-------+
INFO - 16:26:19: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:26:19: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:19: +--------+-------------+-------+-------------+-------+
INFO - 16:26:19: *** End StructureScenario execution (time: 0:00:00.017863) ***
WARNING - 16:26:19: MDAJacobi has reached its maximum number of iterations but the normed residual 2.6870836615612218e-14 is still above the tolerance 1e-14.
INFO - 16:26:19: ... 92%|█████████▏| 46/50 [00:11<00:00, 4.01 it/sec, obj=-3.75e+3]
INFO - 16:26:19:
INFO - 16:26:19: *** Start PropulsionScenario execution ***
INFO - 16:26:19: PropulsionScenario
INFO - 16:26:19: Disciplines: SobieskiPropulsion
INFO - 16:26:19: MDO formulation: DisciplinaryOpt
INFO - 16:26:19: Optimization problem:
INFO - 16:26:19: minimize y_34(x_3)
INFO - 16:26:19: with respect to x_3
INFO - 16:26:19: subject to constraints:
INFO - 16:26:19: g_3(x_3) <= 0.0
INFO - 16:26:19: over the design space:
INFO - 16:26:19: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:19: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:19: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:19: | x_3 | 0.1 | 0.1585858914922077 | 1 | float |
INFO - 16:26:19: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:19: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:19: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:19:
INFO - 16:26:19: ... 3%|▎ | 1/30 [00:00<00:00, 1029.28 it/sec, obj=0.935]
INFO - 16:26:19:
INFO - 16:26:19: ... 7%|▋ | 2/30 [00:00<00:00, 413.88 it/sec, obj=0.935]
INFO - 16:26:19:
INFO - 16:26:19: ... 10%|█ | 3/30 [00:00<00:00, 397.63 it/sec, obj=0.935]
INFO - 16:26:19:
INFO - 16:26:19: ... 13%|█▎ | 4/30 [00:00<00:00, 416.98 it/sec, obj=0.935]
INFO - 16:26:19:
INFO - 16:26:19:
INFO - 16:26:19: Optimization result:
INFO - 16:26:19: Optimizer info:
INFO - 16:26:19: Status: None
INFO - 16:26:19: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:26:19: Number of calls to the objective function by the optimizer: 5
INFO - 16:26:19: Solution:
INFO - 16:26:19: The solution is feasible.
INFO - 16:26:19: Objective: 0.934927632592653
INFO - 16:26:19: Standardized constraints:
INFO - 16:26:19: g_3 = [-7.6979726e-01 -2.3020274e-01 4.4408921e-16 -1.8315086e-01]
INFO - 16:26:19: Design space:
INFO - 16:26:19: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:19: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:19: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:19: | x_3 | 0.1 | 0.1597043907463273 | 1 | float |
INFO - 16:26:19: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:19: *** End PropulsionScenario execution (time: 0:00:00.021807) ***
INFO - 16:26:19:
INFO - 16:26:19: *** Start AerodynamicsScenario execution ***
INFO - 16:26:19: AerodynamicsScenario
INFO - 16:26:19: Disciplines: SobieskiAerodynamics
INFO - 16:26:19: MDO formulation: DisciplinaryOpt
INFO - 16:26:19: Optimization problem:
INFO - 16:26:19: minimize -y_24(x_2)
INFO - 16:26:19: with respect to x_2
INFO - 16:26:19: subject to constraints:
INFO - 16:26:19: g_2(x_2) <= 0.0
INFO - 16:26:19: over the design space:
INFO - 16:26:19: +------+-------------+-------+-------------+-------+
INFO - 16:26:19: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:19: +------+-------------+-------+-------------+-------+
INFO - 16:26:19: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:19: +------+-------------+-------+-------------+-------+
INFO - 16:26:19: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:19: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:19:
INFO - 16:26:19: ... 3%|▎ | 1/30 [00:00<00:00, 944.45 it/sec, obj=-7.84]
INFO - 16:26:19:
INFO - 16:26:19:
INFO - 16:26:19: Optimization result:
INFO - 16:26:19: Optimizer info:
INFO - 16:26:19: Status: 8
INFO - 16:26:19: Message: Positive directional derivative for linesearch
INFO - 16:26:19: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:19: Solution:
INFO - 16:26:19: The solution is feasible.
INFO - 16:26:19: Objective: -7.837358015758577
INFO - 16:26:19: Standardized constraints:
INFO - 16:26:19: g_2 = -0.0005367768756148195
INFO - 16:26:19: Design space:
INFO - 16:26:19: +------+-------------+-------+-------------+-------+
INFO - 16:26:19: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:19: +------+-------------+-------+-------------+-------+
INFO - 16:26:19: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:19: +------+-------------+-------+-------------+-------+
INFO - 16:26:19: *** End AerodynamicsScenario execution (time: 0:00:00.014970) ***
INFO - 16:26:19:
INFO - 16:26:19: *** Start StructureScenario execution ***
INFO - 16:26:19: StructureScenario
INFO - 16:26:19: Disciplines: SobieskiStructure
INFO - 16:26:19: MDO formulation: DisciplinaryOpt
INFO - 16:26:19: Optimization problem:
INFO - 16:26:19: minimize -y_11(x_1)
INFO - 16:26:19: with respect to x_1
INFO - 16:26:19: subject to constraints:
INFO - 16:26:19: g_1(x_1) <= 0.0
INFO - 16:26:19: over the design space:
INFO - 16:26:19: +--------+-------------+-------+-------------+-------+
INFO - 16:26:19: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:19: +--------+-------------+-------+-------------+-------+
INFO - 16:26:19: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:26:19: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:19: +--------+-------------+-------+-------------+-------+
INFO - 16:26:19: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:19: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:19:
INFO - 16:26:19: ... 3%|▎ | 1/30 [00:00<00:00, 570.27 it/sec, obj=-.553]
INFO - 16:26:19:
INFO - 16:26:19:
INFO - 16:26:19: Optimization result:
INFO - 16:26:19: Optimizer info:
INFO - 16:26:19: Status: 8
INFO - 16:26:19: Message: Positive directional derivative for linesearch
INFO - 16:26:19: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:19: Solution:
INFO - 16:26:19: The solution is feasible.
INFO - 16:26:19: Objective: -0.5529319892414425
INFO - 16:26:19: Standardized constraints:
INFO - 16:26:19: g_1 = [-0.01513319 -0.03106661 -0.04241664 -0.05030932 -0.05602222 -0.13893723
INFO - 16:26:19: -0.10106277]
INFO - 16:26:19: Design space:
INFO - 16:26:19: +--------+-------------+-------+-------------+-------+
INFO - 16:26:19: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:19: +--------+-------------+-------+-------------+-------+
INFO - 16:26:19: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:26:19: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:19: +--------+-------------+-------+-------------+-------+
INFO - 16:26:19: *** End StructureScenario execution (time: 0:00:00.017590) ***
INFO - 16:26:19: ... 94%|█████████▍| 47/50 [00:11<00:00, 4.04 it/sec, obj=-3.72e+3]
INFO - 16:26:19:
INFO - 16:26:19: *** Start PropulsionScenario execution ***
INFO - 16:26:19: PropulsionScenario
INFO - 16:26:19: Disciplines: SobieskiPropulsion
INFO - 16:26:19: MDO formulation: DisciplinaryOpt
INFO - 16:26:19: Optimization problem:
INFO - 16:26:19: minimize y_34(x_3)
INFO - 16:26:19: with respect to x_3
INFO - 16:26:19: subject to constraints:
INFO - 16:26:19: g_3(x_3) <= 0.0
INFO - 16:26:19: over the design space:
INFO - 16:26:19: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:19: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:19: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:19: | x_3 | 0.1 | 0.1597043907463273 | 1 | float |
INFO - 16:26:19: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:19: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:19: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:19:
INFO - 16:26:19: ... 3%|▎ | 1/30 [00:00<00:00, 1820.44 it/sec, obj=0.93]
INFO - 16:26:19:
INFO - 16:26:19: ... 7%|▋ | 2/30 [00:00<00:00, 465.13 it/sec, obj=0.93]
INFO - 16:26:19:
INFO - 16:26:19: ... 10%|█ | 3/30 [00:00<00:00, 517.37 it/sec, obj=0.93]
INFO - 16:26:19:
INFO - 16:26:19: ... 13%|█▎ | 4/30 [00:00<00:00, 439.79 it/sec, obj=0.93]
INFO - 16:26:19:
INFO - 16:26:19: ... 17%|█▋ | 5/30 [00:00<00:00, 407.29 it/sec, obj=0.93]
INFO - 16:26:19:
INFO - 16:26:19: ... 20%|██ | 6/30 [00:00<00:00, 375.73 it/sec, obj=0.93]
INFO - 16:26:19:
INFO - 16:26:19:
INFO - 16:26:19: Optimization result:
INFO - 16:26:19: Optimizer info:
INFO - 16:26:19: Status: None
INFO - 16:26:19: Message: Successive iterates of the objective function are closer than ftol_rel or ftol_abs. GEMSEO Stopped the driver
INFO - 16:26:19: Number of calls to the objective function by the optimizer: 9
INFO - 16:26:19: Solution:
INFO - 16:26:19: The solution is feasible.
INFO - 16:26:19: Objective: 0.9303440733943825
INFO - 16:26:19: Standardized constraints:
INFO - 16:26:19: g_3 = [-7.72089746e-01 -2.27910254e-01 8.88178420e-16 -1.83150860e-01]
INFO - 16:26:19: Design space:
INFO - 16:26:19: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:19: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:19: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:19: | x_3 | 0.1 | 0.1581760651483883 | 1 | float |
INFO - 16:26:19: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:19: *** End PropulsionScenario execution (time: 0:00:00.027753) ***
INFO - 16:26:19:
INFO - 16:26:19: *** Start AerodynamicsScenario execution ***
INFO - 16:26:19: AerodynamicsScenario
INFO - 16:26:19: Disciplines: SobieskiAerodynamics
INFO - 16:26:19: MDO formulation: DisciplinaryOpt
INFO - 16:26:19: Optimization problem:
INFO - 16:26:19: minimize -y_24(x_2)
INFO - 16:26:19: with respect to x_2
INFO - 16:26:19: subject to constraints:
INFO - 16:26:19: g_2(x_2) <= 0.0
INFO - 16:26:19: over the design space:
INFO - 16:26:19: +------+-------------+-------+-------------+-------+
INFO - 16:26:19: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:19: +------+-------------+-------+-------------+-------+
INFO - 16:26:19: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:19: +------+-------------+-------+-------------+-------+
INFO - 16:26:19: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:19: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:19:
INFO - 16:26:19: ... 3%|▎ | 1/30 [00:00<00:00, 923.25 it/sec, obj=-7.89]
INFO - 16:26:19:
INFO - 16:26:19:
INFO - 16:26:19: Optimization result:
INFO - 16:26:19: Optimizer info:
INFO - 16:26:19: Status: 8
INFO - 16:26:19: Message: Positive directional derivative for linesearch
INFO - 16:26:19: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:19: Solution:
INFO - 16:26:19: The solution is feasible.
INFO - 16:26:19: Objective: -7.8878346921706814
INFO - 16:26:19: Standardized constraints:
INFO - 16:26:19: g_2 = -0.0005367768756143754
INFO - 16:26:19: Design space:
INFO - 16:26:19: +------+-------------+-------+-------------+-------+
INFO - 16:26:19: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:19: +------+-------------+-------+-------------+-------+
INFO - 16:26:19: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:19: +------+-------------+-------+-------------+-------+
INFO - 16:26:19: *** End AerodynamicsScenario execution (time: 0:00:00.014843) ***
INFO - 16:26:19:
INFO - 16:26:19: *** Start StructureScenario execution ***
INFO - 16:26:19: StructureScenario
INFO - 16:26:19: Disciplines: SobieskiStructure
INFO - 16:26:19: MDO formulation: DisciplinaryOpt
INFO - 16:26:19: Optimization problem:
INFO - 16:26:19: minimize -y_11(x_1)
INFO - 16:26:19: with respect to x_1
INFO - 16:26:19: subject to constraints:
INFO - 16:26:19: g_1(x_1) <= 0.0
INFO - 16:26:19: over the design space:
INFO - 16:26:19: +--------+-------------+-------+-------------+-------+
INFO - 16:26:19: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:19: +--------+-------------+-------+-------------+-------+
INFO - 16:26:19: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:26:19: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:19: +--------+-------------+-------+-------------+-------+
INFO - 16:26:19: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:19: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:19:
INFO - 16:26:19: ... 3%|▎ | 1/30 [00:00<00:00, 548.63 it/sec, obj=-.552]
INFO - 16:26:19:
INFO - 16:26:19:
INFO - 16:26:19: Optimization result:
INFO - 16:26:19: Optimizer info:
INFO - 16:26:19: Status: 8
INFO - 16:26:19: Message: Positive directional derivative for linesearch
INFO - 16:26:19: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:19: Solution:
INFO - 16:26:19: The solution is feasible.
INFO - 16:26:19: Objective: -0.5524125908116502
INFO - 16:26:19: Standardized constraints:
INFO - 16:26:19: g_1 = [-0.01428389 -0.03034381 -0.04181581 -0.04980047 -0.05558251 -0.14007176
INFO - 16:26:19: -0.09992824]
INFO - 16:26:19: Design space:
INFO - 16:26:19: +--------+-------------+-------+-------------+-------+
INFO - 16:26:19: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:19: +--------+-------------+-------+-------------+-------+
INFO - 16:26:19: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:26:19: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:19: +--------+-------------+-------+-------------+-------+
INFO - 16:26:19: *** End StructureScenario execution (time: 0:00:00.017628) ***
INFO - 16:26:19: ... 96%|█████████▌| 48/50 [00:11<00:00, 4.06 it/sec, obj=-3.77e+3]
WARNING - 16:26:20: MDAJacobi has reached its maximum number of iterations but the normed residual 1.7359275648513367e-14 is still above the tolerance 1e-14.
INFO - 16:26:20:
INFO - 16:26:20: *** Start PropulsionScenario execution ***
INFO - 16:26:20: PropulsionScenario
INFO - 16:26:20: Disciplines: SobieskiPropulsion
INFO - 16:26:20: MDO formulation: DisciplinaryOpt
INFO - 16:26:20: Optimization problem:
INFO - 16:26:20: minimize y_34(x_3)
INFO - 16:26:20: with respect to x_3
INFO - 16:26:20: subject to constraints:
INFO - 16:26:20: g_3(x_3) <= 0.0
INFO - 16:26:20: over the design space:
INFO - 16:26:20: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:20: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:20: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:20: | x_3 | 0.1 | 0.1581760651483883 | 1 | float |
INFO - 16:26:20: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:20: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:20: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:20:
INFO - 16:26:20: ... 3%|▎ | 1/30 [00:00<00:00, 1665.07 it/sec, obj=0.924]
INFO - 16:26:20:
INFO - 16:26:20: ... 7%|▋ | 2/30 [00:00<00:00, 452.31 it/sec, obj=0.925]
INFO - 16:26:20:
INFO - 16:26:20: ... 10%|█ | 3/30 [00:00<00:00, 510.86 it/sec, obj=0.924]
INFO - 16:26:20:
INFO - 16:26:20:
INFO - 16:26:20: Optimization result:
INFO - 16:26:20: Optimizer info:
INFO - 16:26:20: Status: 8
INFO - 16:26:20: Message: Positive directional derivative for linesearch
INFO - 16:26:20: Number of calls to the objective function by the optimizer: 5
INFO - 16:26:20: Solution:
INFO - 16:26:20: The solution is feasible.
INFO - 16:26:20: Objective: 0.9248975977699282
INFO - 16:26:20: Standardized constraints:
INFO - 16:26:20: g_3 = [-0.78575194 -0.21424806 0. -0.18310027]
INFO - 16:26:20: Design space:
INFO - 16:26:20: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:20: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:20: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:20: | x_3 | 0.1 | 0.1564083107256074 | 1 | float |
INFO - 16:26:20: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:20: *** End PropulsionScenario execution (time: 0:00:00.021287) ***
INFO - 16:26:20:
INFO - 16:26:20: *** Start AerodynamicsScenario execution ***
INFO - 16:26:20: AerodynamicsScenario
INFO - 16:26:20: Disciplines: SobieskiAerodynamics
INFO - 16:26:20: MDO formulation: DisciplinaryOpt
INFO - 16:26:20: Optimization problem:
INFO - 16:26:20: minimize -y_24(x_2)
INFO - 16:26:20: with respect to x_2
INFO - 16:26:20: subject to constraints:
INFO - 16:26:20: g_2(x_2) <= 0.0
INFO - 16:26:20: over the design space:
INFO - 16:26:20: +------+-------------+-------+-------------+-------+
INFO - 16:26:20: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:20: +------+-------------+-------+-------------+-------+
INFO - 16:26:20: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:20: +------+-------------+-------+-------------+-------+
INFO - 16:26:20: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:20: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:20:
INFO - 16:26:20: ... 3%|▎ | 1/30 [00:00<00:00, 974.06 it/sec, obj=-8.07]
INFO - 16:26:20:
INFO - 16:26:20:
INFO - 16:26:20: Optimization result:
INFO - 16:26:20: Optimizer info:
INFO - 16:26:20: Status: 8
INFO - 16:26:20: Message: Positive directional derivative for linesearch
INFO - 16:26:20: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:20: Solution:
INFO - 16:26:20: The solution is feasible.
INFO - 16:26:20: Objective: -8.067173800951696
INFO - 16:26:20: Standardized constraints:
INFO - 16:26:20: g_2 = -0.006513917195956731
INFO - 16:26:20: Design space:
INFO - 16:26:20: +------+-------------+-------+-------------+-------+
INFO - 16:26:20: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:20: +------+-------------+-------+-------------+-------+
INFO - 16:26:20: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:20: +------+-------------+-------+-------------+-------+
INFO - 16:26:20: *** End AerodynamicsScenario execution (time: 0:00:00.014628) ***
INFO - 16:26:20:
INFO - 16:26:20: *** Start StructureScenario execution ***
INFO - 16:26:20: StructureScenario
INFO - 16:26:20: Disciplines: SobieskiStructure
INFO - 16:26:20: MDO formulation: DisciplinaryOpt
INFO - 16:26:20: Optimization problem:
INFO - 16:26:20: minimize -y_11(x_1)
INFO - 16:26:20: with respect to x_1
INFO - 16:26:20: subject to constraints:
INFO - 16:26:20: g_1(x_1) <= 0.0
INFO - 16:26:20: over the design space:
INFO - 16:26:20: +--------+-------------+-------+-------------+-------+
INFO - 16:26:20: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:20: +--------+-------------+-------+-------------+-------+
INFO - 16:26:20: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:26:20: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:20: +--------+-------------+-------+-------------+-------+
INFO - 16:26:20: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:20: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:20:
INFO - 16:26:20: ... 3%|▎ | 1/30 [00:00<00:00, 594.85 it/sec, obj=-.551]
INFO - 16:26:20:
INFO - 16:26:20:
INFO - 16:26:20: Optimization result:
INFO - 16:26:20: Optimizer info:
INFO - 16:26:20: Status: 8
INFO - 16:26:20: Message: Positive directional derivative for linesearch
INFO - 16:26:20: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:20: Solution:
INFO - 16:26:20: The solution is feasible.
INFO - 16:26:20: Objective: -0.5513569055598421
INFO - 16:26:20: Standardized constraints:
INFO - 16:26:20: g_1 = [-0.00135129 -0.02104734 -0.03459044 -0.04389872 -0.05059691 -0.13539152
INFO - 16:26:20: -0.10460848]
INFO - 16:26:20: Design space:
INFO - 16:26:20: +--------+-------------+-------+-------------+-------+
INFO - 16:26:20: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:20: +--------+-------------+-------+-------------+-------+
INFO - 16:26:20: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:26:20: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:20: +--------+-------------+-------+-------------+-------+
INFO - 16:26:20: *** End StructureScenario execution (time: 0:00:00.017541) ***
INFO - 16:26:20: ... 98%|█████████▊| 49/50 [00:12<00:00, 4.06 it/sec, obj=-3.87e+3]
INFO - 16:26:20:
INFO - 16:26:20: *** Start PropulsionScenario execution ***
INFO - 16:26:20: PropulsionScenario
INFO - 16:26:20: Disciplines: SobieskiPropulsion
INFO - 16:26:20: MDO formulation: DisciplinaryOpt
INFO - 16:26:20: Optimization problem:
INFO - 16:26:20: minimize y_34(x_3)
INFO - 16:26:20: with respect to x_3
INFO - 16:26:20: subject to constraints:
INFO - 16:26:20: g_3(x_3) <= 0.0
INFO - 16:26:20: over the design space:
INFO - 16:26:20: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:20: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:20: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:20: | x_3 | 0.1 | 0.1564083107256074 | 1 | float |
INFO - 16:26:20: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:20: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:20: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:20:
INFO - 16:26:20: ... 3%|▎ | 1/30 [00:00<00:00, 1625.70 it/sec, obj=0.927]
INFO - 16:26:20:
INFO - 16:26:20: ... 7%|▋ | 2/30 [00:00<00:00, 443.30 it/sec, obj=0.927]
INFO - 16:26:20:
INFO - 16:26:20:
INFO - 16:26:20: Optimization result:
INFO - 16:26:20: Optimizer info:
INFO - 16:26:20: Status: 8
INFO - 16:26:20: Message: Positive directional derivative for linesearch
INFO - 16:26:20: Number of calls to the objective function by the optimizer: 3
INFO - 16:26:20: Solution:
INFO - 16:26:20: The solution is feasible.
INFO - 16:26:20: Objective: 0.9265786708001338
INFO - 16:26:20: Standardized constraints:
INFO - 16:26:20: g_3 = [-7.75005354e-01 -2.24994646e-01 4.44089210e-16 -1.83150860e-01]
INFO - 16:26:20: Design space:
INFO - 16:26:20: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:20: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:20: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:20: | x_3 | 0.1 | 0.1569735486779623 | 1 | float |
INFO - 16:26:20: +------+-------------+--------------------+-------------+-------+
INFO - 16:26:20: *** End PropulsionScenario execution (time: 0:00:00.017891) ***
INFO - 16:26:20:
INFO - 16:26:20: *** Start AerodynamicsScenario execution ***
INFO - 16:26:20: AerodynamicsScenario
INFO - 16:26:20: Disciplines: SobieskiAerodynamics
INFO - 16:26:20: MDO formulation: DisciplinaryOpt
INFO - 16:26:20: Optimization problem:
INFO - 16:26:20: minimize -y_24(x_2)
INFO - 16:26:20: with respect to x_2
INFO - 16:26:20: subject to constraints:
INFO - 16:26:20: g_2(x_2) <= 0.0
INFO - 16:26:20: over the design space:
INFO - 16:26:20: +------+-------------+-------+-------------+-------+
INFO - 16:26:20: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:20: +------+-------------+-------+-------------+-------+
INFO - 16:26:20: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:20: +------+-------------+-------+-------------+-------+
INFO - 16:26:20: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:20: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:20:
INFO - 16:26:20: ... 3%|▎ | 1/30 [00:00<00:00, 854.24 it/sec, obj=-8.01]
INFO - 16:26:20:
INFO - 16:26:20:
INFO - 16:26:20: Optimization result:
INFO - 16:26:20: Optimizer info:
INFO - 16:26:20: Status: 8
INFO - 16:26:20: Message: Positive directional derivative for linesearch
INFO - 16:26:20: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:20: Solution:
INFO - 16:26:20: The solution is feasible.
INFO - 16:26:20: Objective: -8.012561424606782
INFO - 16:26:20: Standardized constraints:
INFO - 16:26:20: g_2 = -0.0005367768756139313
INFO - 16:26:20: Design space:
INFO - 16:26:20: +------+-------------+-------+-------------+-------+
INFO - 16:26:20: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:20: +------+-------------+-------+-------------+-------+
INFO - 16:26:20: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:20: +------+-------------+-------+-------------+-------+
INFO - 16:26:20: *** End AerodynamicsScenario execution (time: 0:00:00.015249) ***
INFO - 16:26:20:
INFO - 16:26:20: *** Start StructureScenario execution ***
INFO - 16:26:20: StructureScenario
INFO - 16:26:20: Disciplines: SobieskiStructure
INFO - 16:26:20: MDO formulation: DisciplinaryOpt
INFO - 16:26:20: Optimization problem:
INFO - 16:26:20: minimize -y_11(x_1)
INFO - 16:26:20: with respect to x_1
INFO - 16:26:20: subject to constraints:
INFO - 16:26:20: g_1(x_1) <= 0.0
INFO - 16:26:20: over the design space:
INFO - 16:26:20: +--------+-------------+-------+-------------+-------+
INFO - 16:26:20: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:20: +--------+-------------+-------+-------------+-------+
INFO - 16:26:20: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:26:20: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:20: +--------+-------------+-------+-------------+-------+
INFO - 16:26:20: Solving optimization problem with algorithm SLSQP:
INFO - 16:26:20: ... 0%| | 0/30 [00:00<?, ?it]
INFO - 16:26:20:
INFO - 16:26:20: ... 3%|▎ | 1/30 [00:00<00:00, 553.19 it/sec, obj=-.555]
INFO - 16:26:20:
INFO - 16:26:20:
INFO - 16:26:20: Optimization result:
INFO - 16:26:20: Optimizer info:
INFO - 16:26:20: Status: 8
INFO - 16:26:20: Message: Positive directional derivative for linesearch
INFO - 16:26:20: Number of calls to the objective function by the optimizer: 2
INFO - 16:26:20: Solution:
INFO - 16:26:20: The solution is feasible.
INFO - 16:26:20: Objective: -0.5554615949088791
INFO - 16:26:20: Standardized constraints:
INFO - 16:26:20: g_1 = [-0.01561273 -0.03147473 -0.04275589 -0.05059664 -0.05627049 -0.13829835
INFO - 16:26:20: -0.10170165]
INFO - 16:26:20: Design space:
INFO - 16:26:20: +--------+-------------+-------+-------------+-------+
INFO - 16:26:20: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:20: +--------+-------------+-------+-------------+-------+
INFO - 16:26:20: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:26:20: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:26:20: +--------+-------------+-------+-------------+-------+
INFO - 16:26:20: *** End StructureScenario execution (time: 0:00:00.018196) ***
INFO - 16:26:20: ... 100%|██████████| 50/50 [00:12<00:00, 4.09 it/sec, obj=-3.85e+3]
INFO - 16:26:20: Optimization result:
INFO - 16:26:20: Optimizer info:
INFO - 16:26:20: Status: None
INFO - 16:26:20: Message: Maximum number of iterations reached. GEMSEO Stopped the driver
INFO - 16:26:20: Number of calls to the objective function by the optimizer: 52
INFO - 16:26:20: Solution:
INFO - 16:26:20: The solution is feasible.
INFO - 16:26:20: Objective: -3924.8734824773705
INFO - 16:26:20: Standardized constraints:
INFO - 16:26:20: g_1_g_2_g_3 = [-1.77964882e-02 -3.33332546e-02 -4.43007893e-02 -5.19050387e-02
INFO - 16:26:20: -5.74010918e-02 -1.35404543e-01 -1.04595457e-01 -5.36776876e-04
INFO - 16:26:20: -7.76537629e-01 -2.23462371e-01 0.00000000e+00 -1.83150860e-01]
INFO - 16:26:20: Design space:
INFO - 16:26:20: +-------------+-------------+---------------------+-------------+-------+
INFO - 16:26:20: | name | lower_bound | value | upper_bound | type |
INFO - 16:26:20: +-------------+-------------+---------------------+-------------+-------+
INFO - 16:26:20: | x_shared[0] | 0.01 | 0.05986580578109634 | 0.09 | float |
INFO - 16:26:20: | x_shared[1] | 30000 | 60000 | 60000 | float |
INFO - 16:26:20: | x_shared[2] | 1.4 | 1.400800000983094 | 1.8 | float |
INFO - 16:26:20: | x_shared[3] | 2.5 | 2.500000000000004 | 8.5 | float |
INFO - 16:26:20: | x_shared[4] | 40 | 70 | 70 | float |
INFO - 16:26:20: | x_shared[5] | 500 | 1481.923187518174 | 1500 | float |
INFO - 16:26:20: +-------------+-------------+---------------------+-------------+-------+
INFO - 16:26:20: *** End MDOScenario execution (time: 0:00:12.254356) ***
{'max_iter': 50, 'algo_options': {'xtol_rel': 1e-07, 'xtol_abs': 1e-07, 'ftol_rel': 1e-07, 'ftol_abs': 1e-07, 'ineq_tolerance': 0.0001}, 'algo': 'NLOPT_COBYLA'}
Plot the history of the MDA residuals¶
For the first MDA:
system_scenario.formulation.mda1.plot_residual_history(save=False, show=True)
# For the second MDA:
system_scenario.formulation.mda2.plot_residual_history(save=False, show=True)
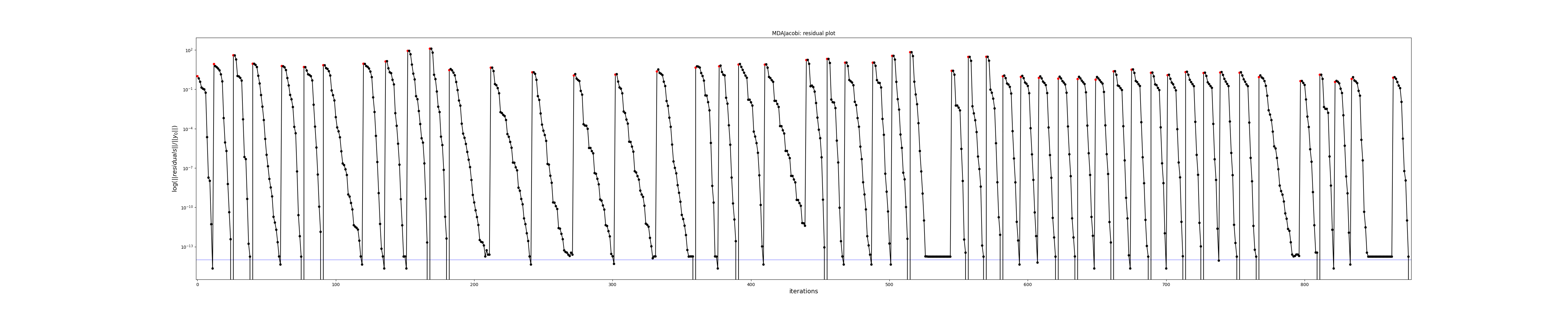
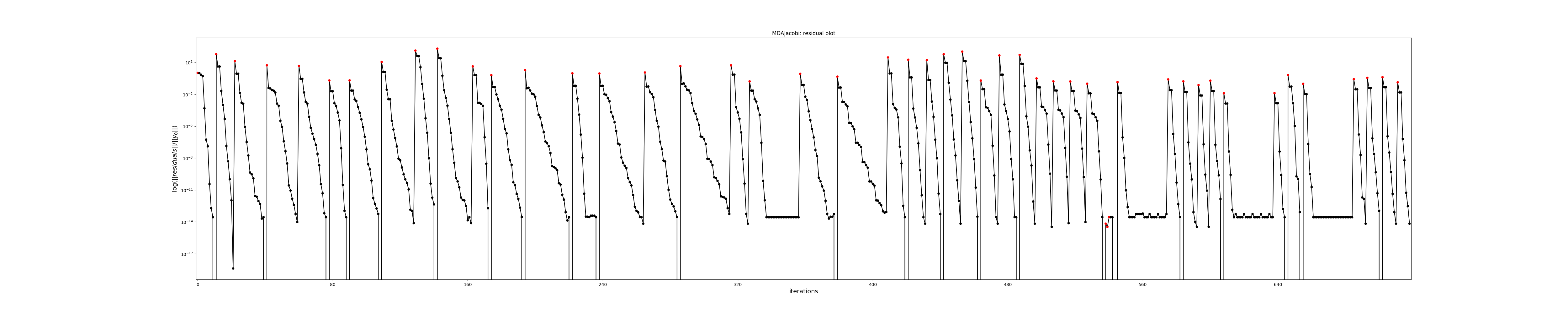
Plot the system optimization history view¶
system_scenario.post_process("OptHistoryView", save=False, show=True)
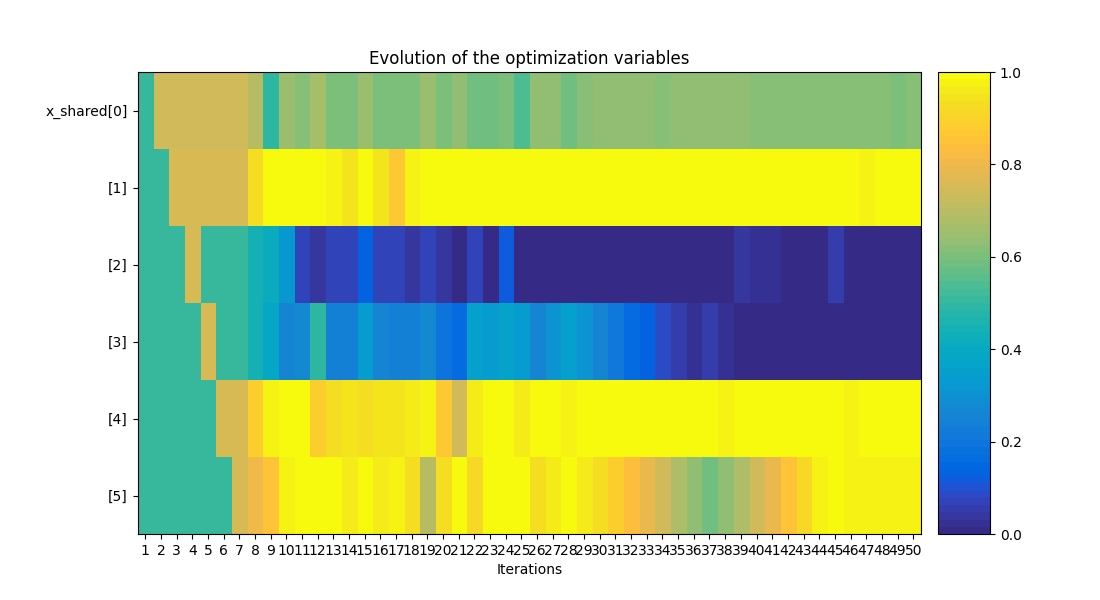
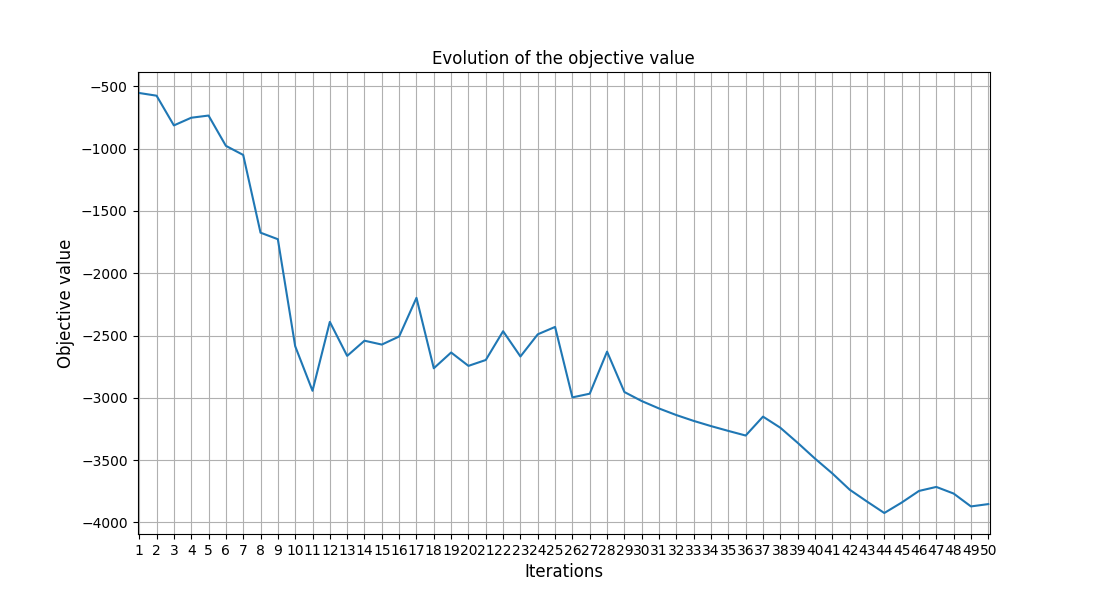
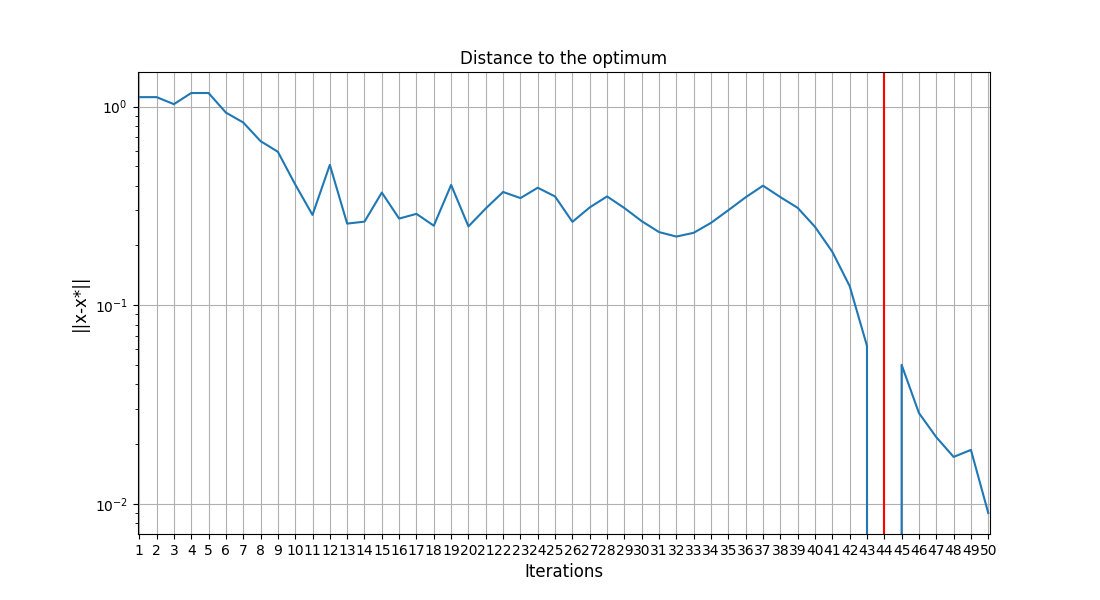
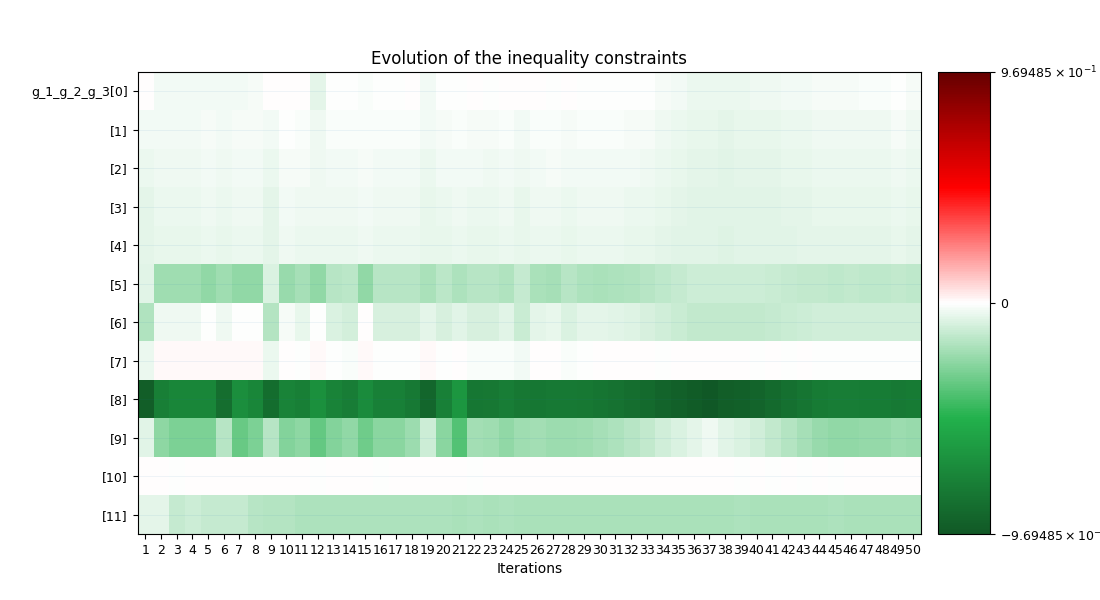
/home/docs/checkouts/readthedocs.org/user_builds/gemseo/envs/5.0.0/lib/python3.9/site-packages/genson/schema/strategies/base.py:42: UserWarning: Schema incompatible. Keyword 'description' has conflicting values ('The width and height of the figure in inches, e.g. ``(w, h)``.\nIf ``None``, use the :attr:`.OptPostProcessor.DEFAULT_FIG_SIZE`\nof the post-processor.' vs. 'The width and height of the figure in inches, e.g. `(w, h)`.\nIf ``None``, use the :attr:`.OptPostProcessor.DEFAULT_FIG_SIZE`\nof the post-processor.'). Using 'The width and height of the figure in inches, e.g. ``(w, h)``.\nIf ``None``, use the :attr:`.OptPostProcessor.DEFAULT_FIG_SIZE`\nof the post-processor.'
warn(('Schema incompatible. Keyword {0!r} has conflicting '
WARNING - 16:26:21: Failed to create Hessian approximation.
Traceback (most recent call last):
File "/home/docs/checkouts/readthedocs.org/user_builds/gemseo/envs/5.0.0/lib/python3.9/site-packages/gemseo/post/opt_history_view.py", line 621, in _create_hessian_approx_plot
_, diag, _, _ = SR1Approx(history).build_approximation(
File "/home/docs/checkouts/readthedocs.org/user_builds/gemseo/envs/5.0.0/lib/python3.9/site-packages/gemseo/post/core/hessians.py", line 379, in build_approximation
x_hist, grad_hist, _, _ = self.get_x_grad_history(
File "/home/docs/checkouts/readthedocs.org/user_builds/gemseo/envs/5.0.0/lib/python3.9/site-packages/gemseo/post/core/hessians.py", line 170, in get_x_grad_history
raise ValueError(
ValueError: Cannot build approximation for function: -y_4 because its gradient history is too small: 0.
<gemseo.post.opt_history_view.OptHistoryView object at 0x7fea444bd250>
Plot the structure optimization histories of the 2 first iterations¶
struct_databases = system_scenario.formulation.scenario_adapters[2].databases
for database in struct_databases[:2]:
opt_problem = deepcopy(sc_str.formulation.opt_problem)
opt_problem.database = database
execute_post(opt_problem, "OptHistoryView", save=False, show=True)
for disc in [propu, aero, mission, struct]:
print(f"{disc.name}: {disc.n_calls} calls.")
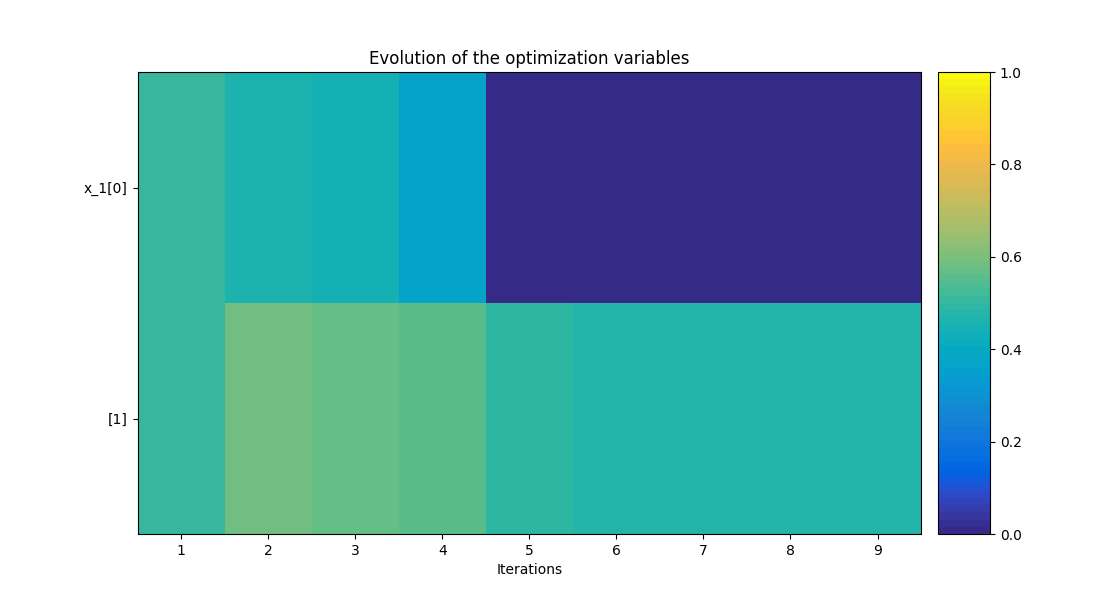
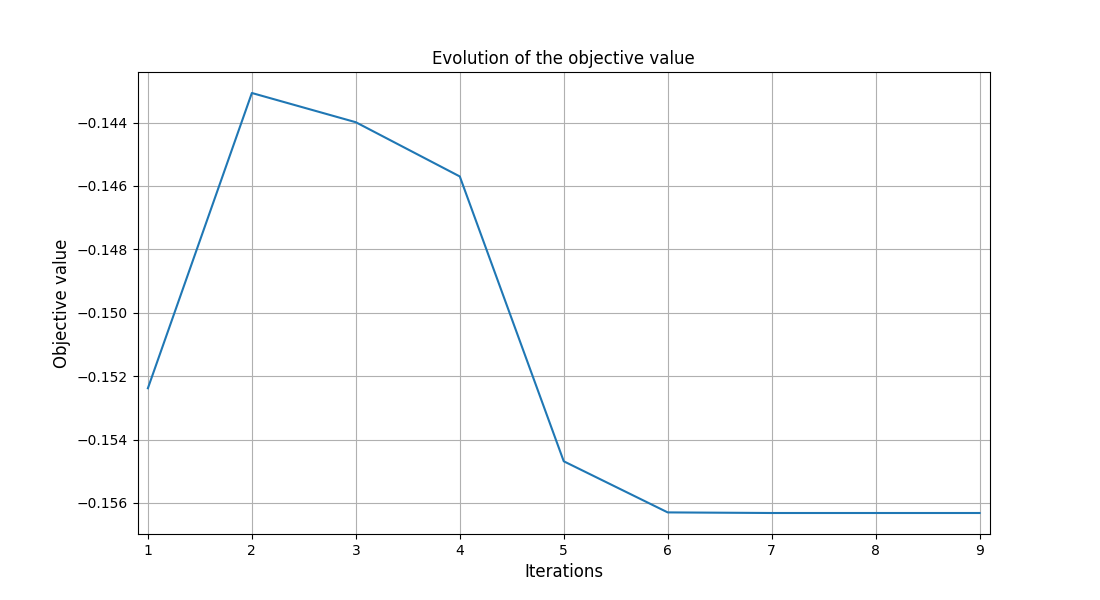
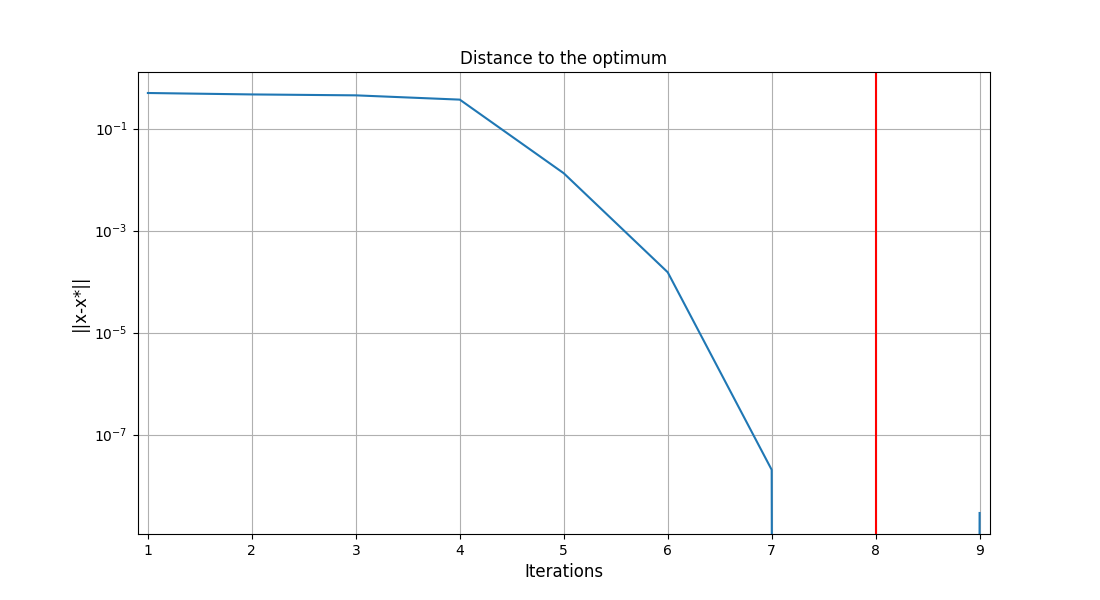
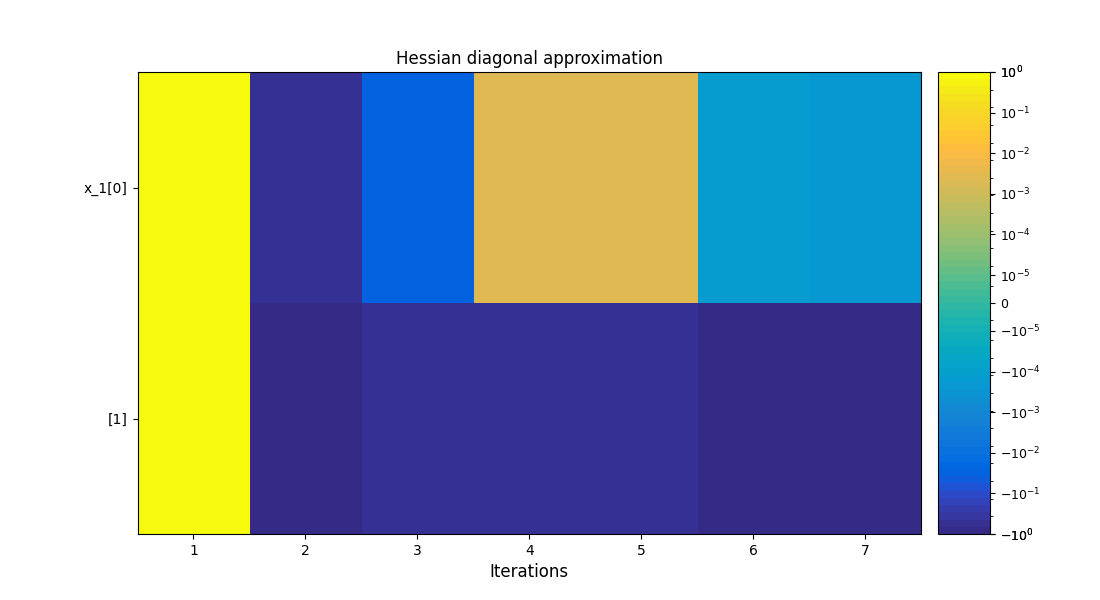
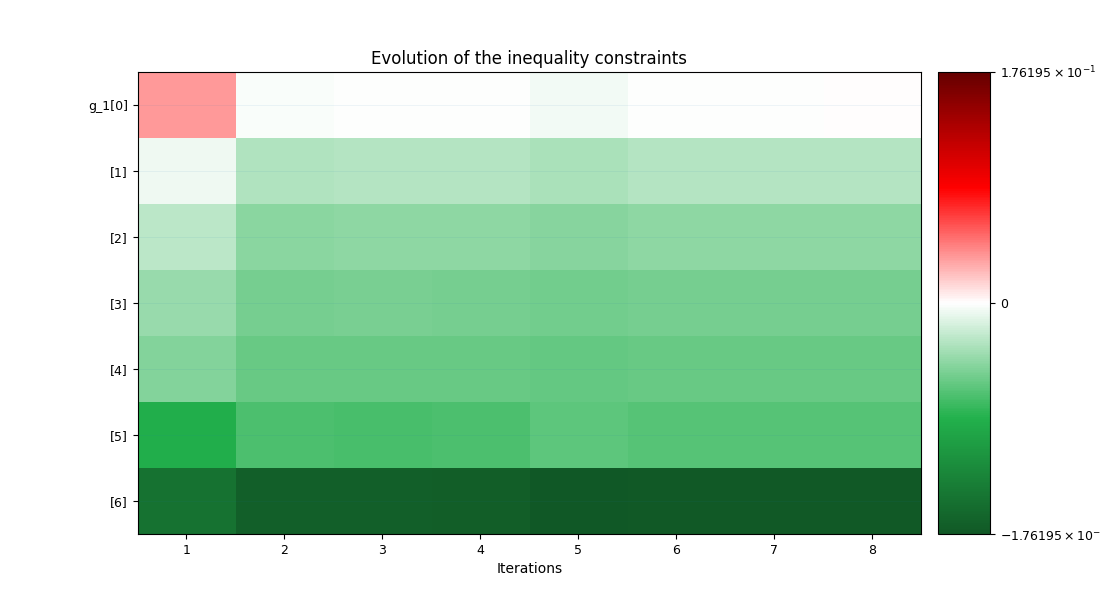
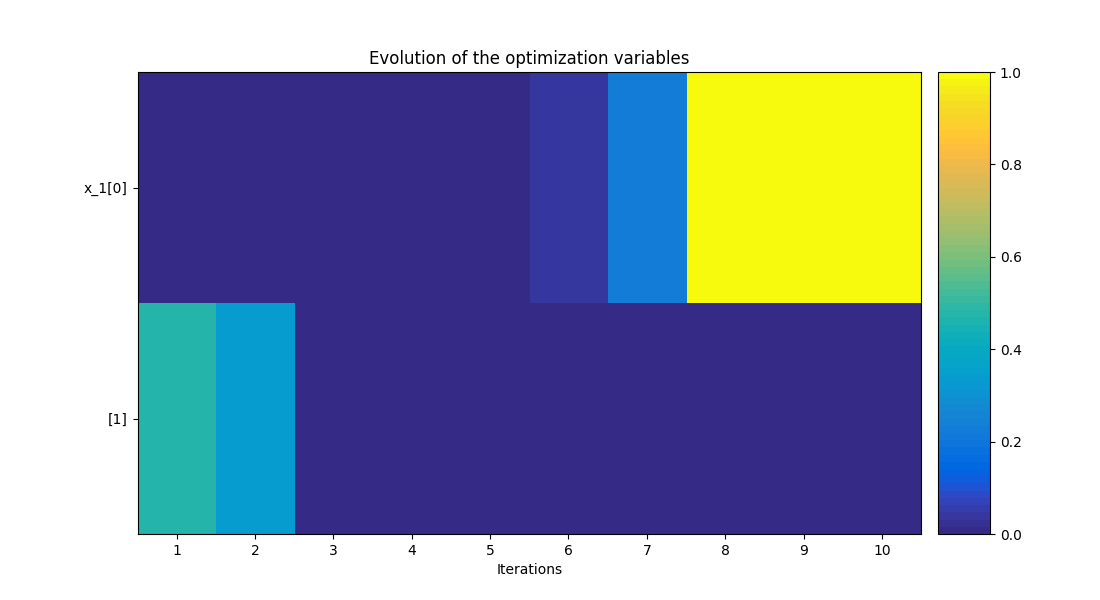
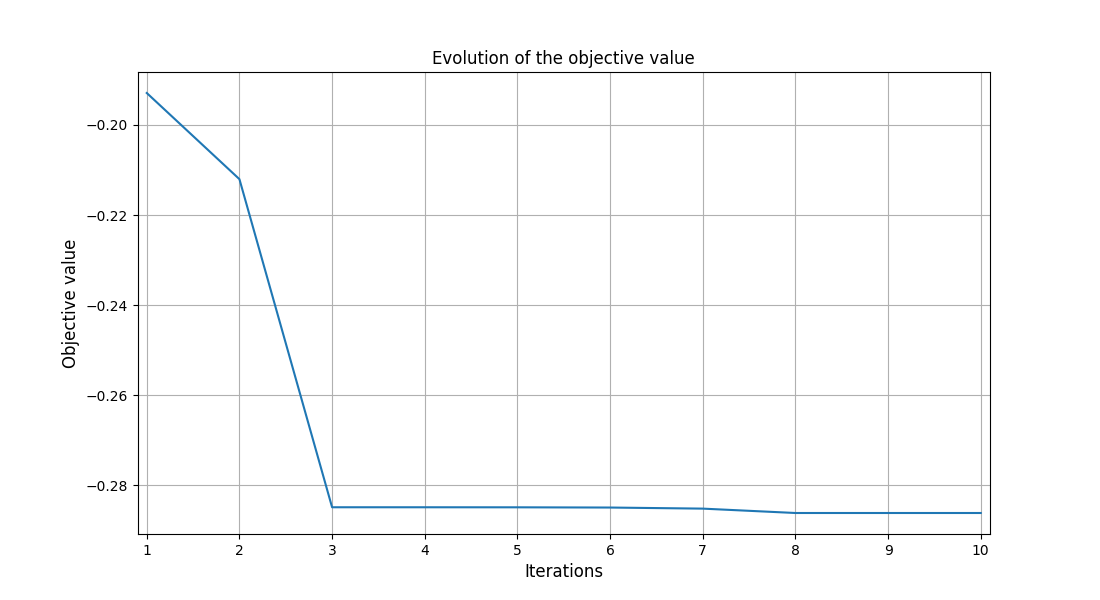
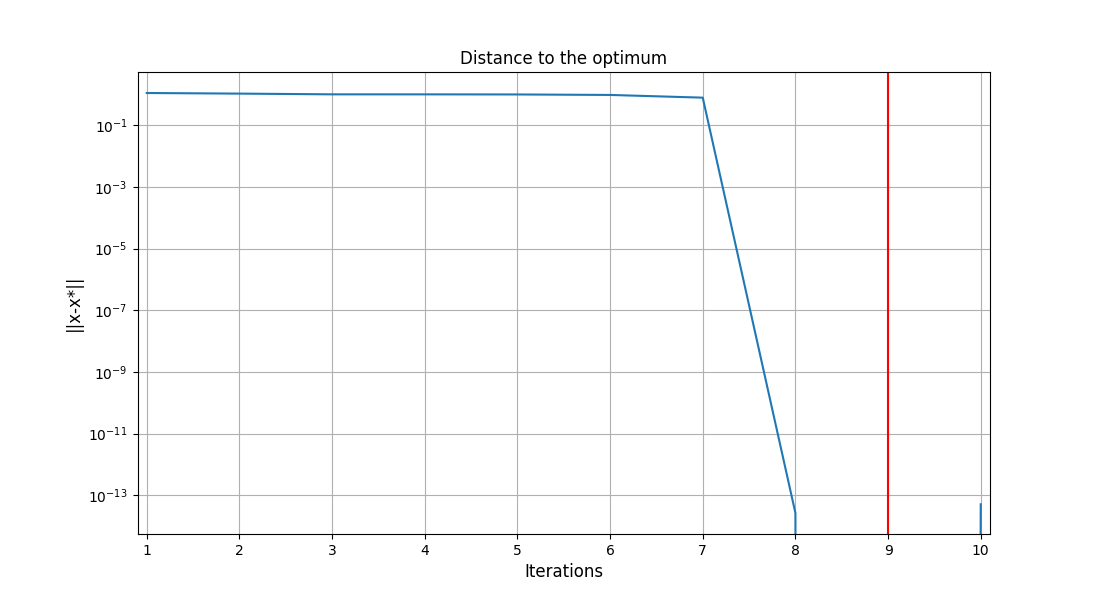
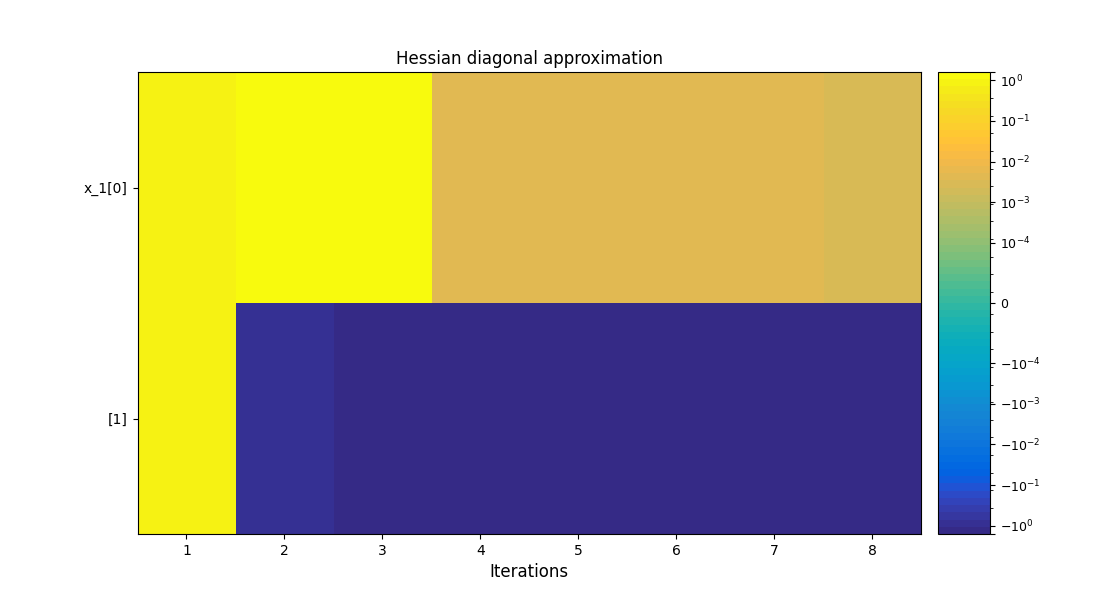
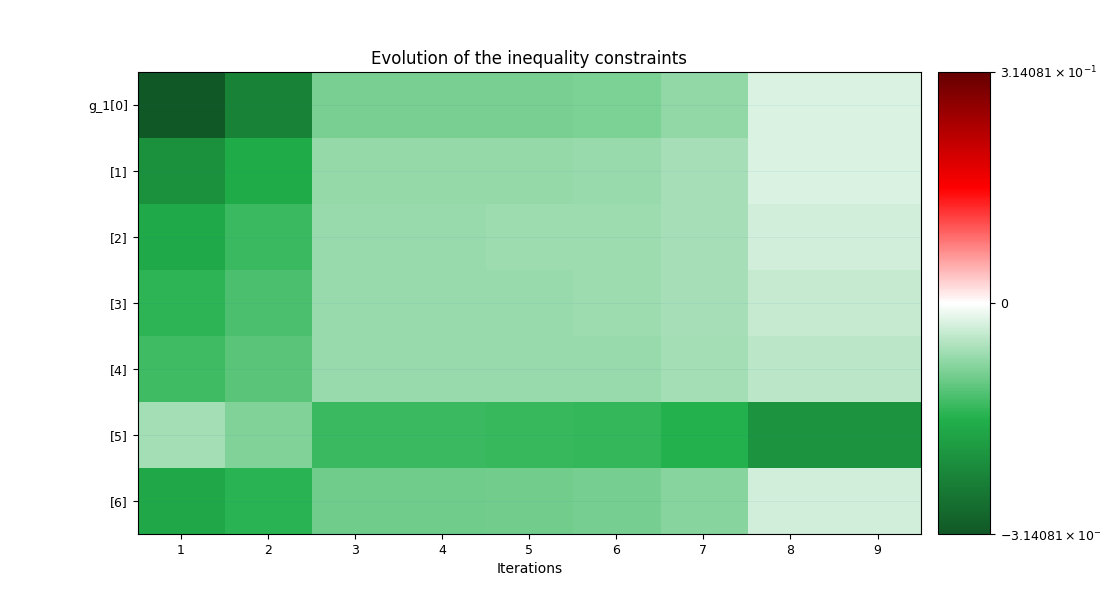
/home/docs/checkouts/readthedocs.org/user_builds/gemseo/envs/5.0.0/lib/python3.9/site-packages/gemseo/post/opt_history_view.py:599: UserWarning: All values for SymLogScale are below linthresh, making it effectively linear. You likely should lower the value of linthresh.
col_bar = fig.colorbar(
SobieskiPropulsion: 1490 calls.
SobieskiAerodynamics: 1626 calls.
SobieskiMission: 50 calls.
SobieskiStructure: 1757 calls.
Total running time of the script: ( 0 minutes 17.140 seconds)