Note
Go to the end to download the full example code.
IDF-based MDO on the Sobieski SSBJ test case#
from __future__ import annotations
from gemseo import create_discipline
from gemseo import create_scenario
from gemseo import generate_n2_plot
from gemseo.problems.mdo.sobieski.core.design_space import SobieskiDesignSpace
from gemseo.settings.opt import SLSQP_Settings
Instantiate the disciplines#
First, we instantiate the four disciplines of the use case:
SobieskiPropulsion,
SobieskiAerodynamics,
SobieskiMission
and SobieskiStructure.
disciplines = create_discipline([
"SobieskiPropulsion",
"SobieskiAerodynamics",
"SobieskiMission",
"SobieskiStructure",
])
We can quickly access the most relevant information of any discipline (name, inputs,
and outputs) with Python's print() function. Moreover, we can get the default
input values of a discipline with the attribute Discipline.default_input_data
for discipline in disciplines:
print(discipline)
print(f"Default inputs: {discipline.default_input_data}")
SobieskiPropulsion
Default inputs: {'y_23': array([12562.01206488]), 'x_3': array([0.5]), 'x_shared': array([5.0e-02, 4.5e+04, 1.6e+00, 5.5e+00, 5.5e+01, 1.0e+03]), 'c_3': array([4360.])}
SobieskiAerodynamics
Default inputs: {'x_2': array([1.]), 'y_32': array([0.50279625]), 'x_shared': array([5.0e-02, 4.5e+04, 1.6e+00, 5.5e+00, 5.5e+01, 1.0e+03]), 'y_12': array([5.06069742e+04, 9.50000000e-01]), 'c_4': array([0.01375])}
SobieskiMission
Default inputs: {'y_14': array([50606.9741711 , 7306.20262124]), 'x_shared': array([5.0e-02, 4.5e+04, 1.6e+00, 5.5e+00, 5.5e+01, 1.0e+03]), 'y_24': array([4.15006276]), 'y_34': array([1.10754577])}
SobieskiStructure
Default inputs: {'y_21': array([50606.9741711]), 'y_31': array([6354.32430691]), 'x_1': array([0.25, 1. ]), 'x_shared': array([5.0e-02, 4.5e+04, 1.6e+00, 5.5e+00, 5.5e+01, 1.0e+03]), 'c_0': array([2000.]), 'c_1': array([25000.]), 'c_2': array([6.])}
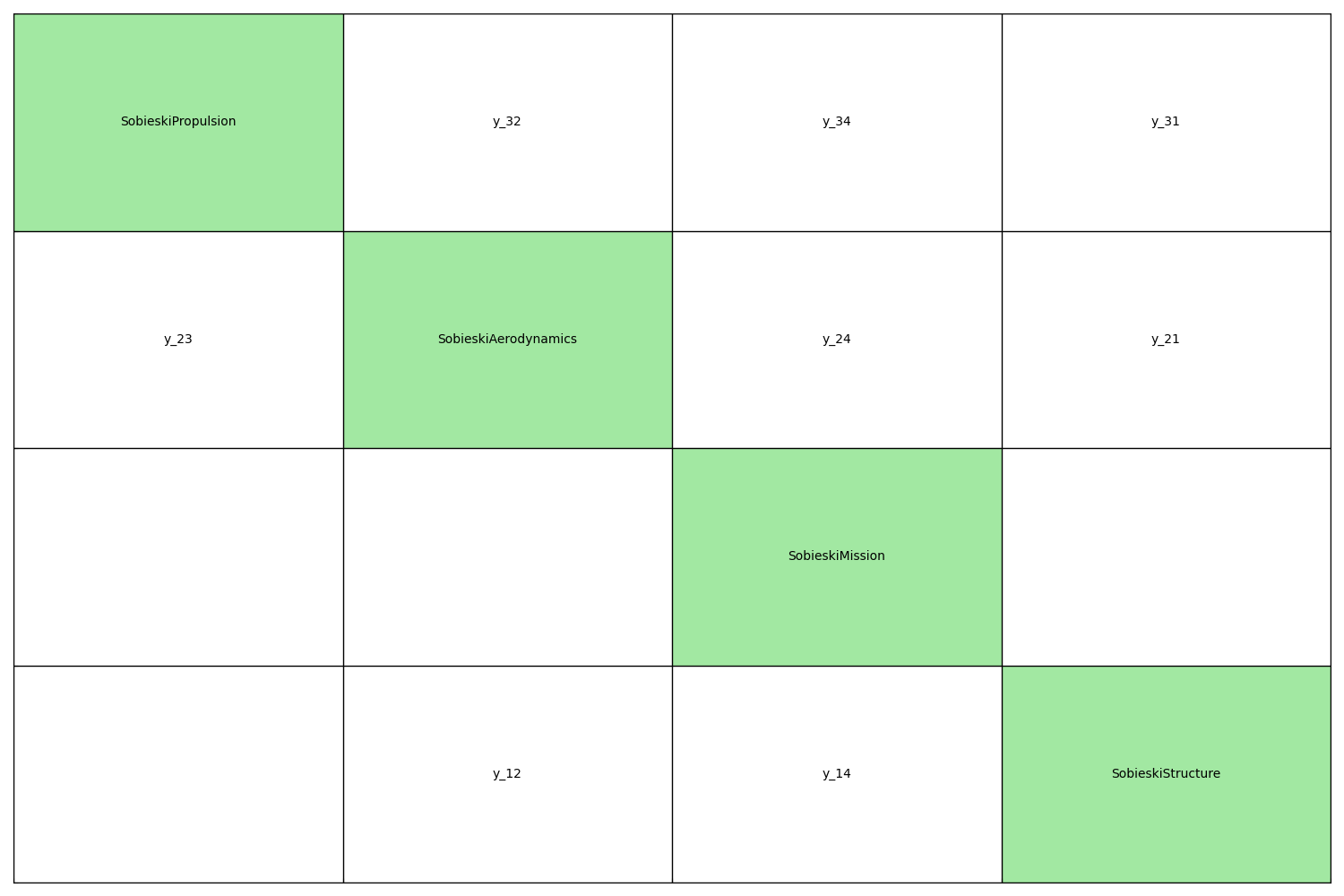
You may also be interested in plotting the couplings of your disciplines.
A quick way of getting this information is the API function
generate_n2_plot(). A much more detailed explanation of coupling
visualization is available here.
generate_n2_plot(disciplines, save=False, show=True)
Build, execute and post-process the scenario#
Then, we build the scenario which links the disciplines
with the formulation and the optimization algorithm. Here, we use the
IDF formulation. We tell the scenario to minimize -y_4 instead of
minimizing y_4 (range), which is the default option.
Instantiate the scenario#
design_space = SobieskiDesignSpace()
design_space
scenario = create_scenario(
disciplines,
"y_4",
design_space,
maximize_objective=True,
formulation_name="IDF",
)
Set the design constraints#
for c_name in ["g_1", "g_2", "g_3"]:
scenario.add_constraint(c_name, constraint_type="ineq")
Visualize the XDSM#
Generate the XDSM file on the fly:
log_workflow_status=Truewill log the status of the workflow in the console,save_html(defaultTrue) will generate a self-contained HTML file, that can be automatically opened usingshow_html=True.
scenario.xdsmize(save_html=False)
Define the algorithm inputs#
We set the maximum number of iterations, the optimizer and the optimizer settings
slsqp_settings = SLSQP_Settings(
max_iter=20,
ftol_rel=1e-10,
ineq_tolerance=1e-3,
eq_tolerance=1e-3,
normalize_design_space=True,
)
Execute the scenario#
scenario.execute(slsqp_settings)
INFO - 16:23:44: *** Start MDOScenario execution ***
INFO - 16:23:44: MDOScenario
INFO - 16:23:44: Disciplines: SobieskiAerodynamics SobieskiMission SobieskiPropulsion SobieskiStructure
INFO - 16:23:44: MDO formulation: IDF
INFO - 16:23:44: Optimization problem:
INFO - 16:23:44: minimize -y_4(x_shared, y_14, y_24, y_34)
INFO - 16:23:44: with respect to x_1, x_2, x_3, x_shared, y_12, y_14, y_21, y_23, y_24, y_31, y_32, y_34
INFO - 16:23:44: under the equality constraints
INFO - 16:23:44: consistency_y_31_y_32_y_34(x_shared, x_3, y_23): y_31(x_shared, x_3, y_23) - y_31 = 0.0
INFO - 16:23:44: y_32(x_shared, x_3, y_23) - y_32 = 0.0
INFO - 16:23:44: y_34(x_shared, x_3, y_23) - y_34 = 0.0
INFO - 16:23:44: consistency_y_21_y_23_y_24(x_shared, x_2, y_32, y_12): y_21(x_shared, x_2, y_32, y_12) - y_21 = 0.0
INFO - 16:23:44: y_23(x_shared, x_2, y_32, y_12) - y_23 = 0.0
INFO - 16:23:44: y_24(x_shared, x_2, y_32, y_12) - y_24 = 0.0
INFO - 16:23:44: consistency_y_12_y_14(x_shared, x_1, y_31, y_21): y_12(x_shared, x_1, y_31, y_21) - y_12 = 0.0
INFO - 16:23:44: y_14(x_shared, x_1, y_31, y_21) - y_14 = 0.0
INFO - 16:23:44: under the inequality constraints
INFO - 16:23:44: g_1(x_shared, x_1, y_31, y_21) <= 0
INFO - 16:23:44: g_2(x_shared, x_2, y_32, y_12) <= 0
INFO - 16:23:44: g_3(x_shared, x_3, y_23) <= 0
INFO - 16:23:44: over the design space:
INFO - 16:23:44: +-------------+-------------+--------------------+-------------+-------+
INFO - 16:23:44: | Name | Lower bound | Value | Upper bound | Type |
INFO - 16:23:44: +-------------+-------------+--------------------+-------------+-------+
INFO - 16:23:44: | x_shared[0] | 0.01 | 0.05 | 0.09 | float |
INFO - 16:23:44: | x_shared[1] | 30000 | 45000 | 60000 | float |
INFO - 16:23:44: | x_shared[2] | 1.4 | 1.6 | 1.8 | float |
INFO - 16:23:44: | x_shared[3] | 2.5 | 5.5 | 8.5 | float |
INFO - 16:23:44: | x_shared[4] | 40 | 55 | 70 | float |
INFO - 16:23:44: | x_shared[5] | 500 | 1000 | 1500 | float |
INFO - 16:23:44: | x_1[0] | 0.1 | 0.25 | 0.4 | float |
INFO - 16:23:44: | x_1[1] | 0.75 | 1 | 1.25 | float |
INFO - 16:23:44: | x_2 | 0.75 | 1 | 1.25 | float |
INFO - 16:23:44: | x_3 | 0.1 | 0.5 | 1 | float |
INFO - 16:23:44: | y_14[0] | 24850 | 50606.9741711 | 77100 | float |
INFO - 16:23:44: | y_14[1] | -7700 | 7306.20262124 | 45000 | float |
INFO - 16:23:44: | y_32 | 0.235 | 0.5027962499999999 | 0.795 | float |
INFO - 16:23:44: | y_31 | 2960 | 6354.32430691 | 10185 | float |
INFO - 16:23:44: | y_24 | 0.44 | 4.15006276 | 11.13 | float |
INFO - 16:23:44: | y_34 | 0.44 | 1.10754577 | 1.98 | float |
INFO - 16:23:44: | y_23 | 3365 | 12194.2671934 | 26400 | float |
INFO - 16:23:44: | y_21 | 24850 | 50606.9741711 | 77250 | float |
INFO - 16:23:44: | y_12[0] | 24850 | 50606.9742 | 77250 | float |
INFO - 16:23:44: | y_12[1] | 0.45 | 0.95 | 1.5 | float |
INFO - 16:23:44: +-------------+-------------+--------------------+-------------+-------+
INFO - 16:23:44: Solving optimization problem with algorithm SLSQP:
INFO - 16:23:44: 5%|▌ | 1/20 [00:00<00:00, 60.36 it/sec, feas=False, obj=-536]
INFO - 16:23:44: 10%|█ | 2/20 [00:00<00:00, 98.51 it/sec, feas=False, obj=-1.49e+3]
INFO - 16:23:44: 15%|█▌ | 3/20 [00:00<00:00, 124.97 it/sec, feas=False, obj=-3.83e+3]
INFO - 16:23:44: 20%|██ | 4/20 [00:00<00:00, 144.04 it/sec, feas=False, obj=-3.96e+3]
INFO - 16:23:44: 25%|██▌ | 5/20 [00:00<00:00, 159.04 it/sec, feas=True, obj=-3.96e+3]
INFO - 16:23:44: 30%|███ | 6/20 [00:00<00:00, 169.50 it/sec, feas=True, obj=-3.96e+3]
INFO - 16:23:44: 35%|███▌ | 7/20 [00:00<00:00, 178.01 it/sec, feas=True, obj=-3.96e+3]
INFO - 16:23:44: 40%|████ | 8/20 [00:00<00:00, 194.46 it/sec, feas=True, obj=-3.96e+3]
INFO - 16:23:44: 45%|████▌ | 9/20 [00:00<00:00, 199.92 it/sec, feas=True, obj=-3.96e+3]
INFO - 16:23:44: 50%|█████ | 10/20 [00:00<00:00, 213.63 it/sec, feas=True, obj=-3.96e+3]
INFO - 16:23:44: 55%|█████▌ | 11/20 [00:00<00:00, 226.51 it/sec, feas=True, obj=-3.96e+3]
INFO - 16:23:44: 60%|██████ | 12/20 [00:00<00:00, 238.54 it/sec, feas=True, obj=-3.96e+3]
INFO - 16:23:44: 65%|██████▌ | 13/20 [00:00<00:00, 249.72 it/sec, feas=True, obj=-3.96e+3]
INFO - 16:23:44: 70%|███████ | 14/20 [00:00<00:00, 260.14 it/sec, feas=True, obj=-3.96e+3]
INFO - 16:23:44: 75%|███████▌ | 15/20 [00:00<00:00, 269.89 it/sec, feas=True, obj=-3.96e+3]
INFO - 16:23:44: 80%|████████ | 16/20 [00:00<00:00, 279.14 it/sec, feas=True, obj=-3.96e+3]
INFO - 16:23:44: 85%|████████▌ | 17/20 [00:00<00:00, 287.88 it/sec, feas=True, obj=-3.96e+3]
INFO - 16:23:44: 90%|█████████ | 18/20 [00:00<00:00, 296.09 it/sec, feas=True, obj=-3.96e+3]
INFO - 16:23:44: 95%|█████████▌| 19/20 [00:00<00:00, 303.93 it/sec, feas=True, obj=-3.96e+3]
INFO - 16:23:44: 100%|██████████| 20/20 [00:00<00:00, 299.06 it/sec, feas=True, obj=-3.96e+3]
INFO - 16:23:44: Optimization result:
INFO - 16:23:44: Optimizer info:
INFO - 16:23:44: Status: 8
INFO - 16:23:44: Message: Positive directional derivative for linesearch
INFO - 16:23:44: Solution:
INFO - 16:23:44: The solution is feasible.
INFO - 16:23:44: Objective: -3963.909125280606
INFO - 16:23:44: Standardized constraints:
INFO - 16:23:44: consistency_y_12_y_14 = [ 1.12943503e-05 4.28787041e-07 1.13267743e-05 -1.50426345e-05]
INFO - 16:23:44: consistency_y_21_y_23_y_24 = [-2.77708306e-16 1.33085464e-05 -2.62473913e-05]
INFO - 16:23:44: consistency_y_31_y_32_y_34 = [-2.35661889e-06 -2.32437808e-06 1.57269783e-05]
INFO - 16:23:44: g_1 = [-0.01807265 -0.03335477 -0.04425595 -0.0518399 -0.05733055 -0.13720865
INFO - 16:23:44: -0.10279135]
INFO - 16:23:44: g_2 = 7.162693463458325e-06
INFO - 16:23:44: g_3 = [-7.67188159e-01 -2.32811841e-01 -3.73860557e-05 -1.83255000e-01]
INFO - 16:23:44: Design space:
INFO - 16:23:44: +-------------+-------------+---------------------+-------------+-------+
INFO - 16:23:44: | Name | Lower bound | Value | Upper bound | Type |
INFO - 16:23:44: +-------------+-------------+---------------------+-------------+-------+
INFO - 16:23:44: | x_shared[0] | 0.01 | 0.06000179067336589 | 0.09 | float |
INFO - 16:23:44: | x_shared[1] | 30000 | 60000 | 60000 | float |
INFO - 16:23:44: | x_shared[2] | 1.4 | 1.4 | 1.8 | float |
INFO - 16:23:44: | x_shared[3] | 2.5 | 2.5 | 8.5 | float |
INFO - 16:23:44: | x_shared[4] | 40 | 70 | 70 | float |
INFO - 16:23:44: | x_shared[5] | 500 | 1500 | 1500 | float |
INFO - 16:23:44: | x_1[0] | 0.1 | 0.4 | 0.4 | float |
INFO - 16:23:44: | x_1[1] | 0.75 | 0.75 | 1.25 | float |
INFO - 16:23:44: | x_2 | 0.75 | 0.75 | 1.25 | float |
INFO - 16:23:44: | x_3 | 0.1 | 0.156238904271528 | 1 | float |
INFO - 16:23:44: | y_14[0] | 24850 | 44749.85202975167 | 77100 | float |
INFO - 16:23:44: | y_14[1] | -7700 | 19351.86291108692 | 45000 | float |
INFO - 16:23:44: | y_32 | 0.235 | 0.7328131425977524 | 0.795 | float |
INFO - 16:23:44: | y_31 | 2960 | 9437.362336215188 | 10185 | float |
INFO - 16:23:44: | y_24 | 0.44 | 8.05763183450019 | 11.13 | float |
INFO - 16:23:44: | y_34 | 0.44 | 0.9239115967364436 | 1.98 | float |
INFO - 16:23:44: | y_23 | 3365 | 5553.60943830111 | 26400 | float |
INFO - 16:23:44: | y_21 | 24850 | 44749.85202975168 | 77250 | float |
INFO - 16:23:44: | y_12[0] | 24850 | 44749.85202975167 | 77250 | float |
INFO - 16:23:44: | y_12[1] | 0.45 | 0.9027908995968825 | 1.5 | float |
INFO - 16:23:44: +-------------+-------------+---------------------+-------------+-------+
INFO - 16:23:44: *** End MDOScenario execution ***
Save the optimization history#
We can save the whole optimization problem and its history for further post processing:
scenario.save_optimization_history("idf_history.h5", file_format="hdf5")
INFO - 16:23:44: Exporting the optimization problem to the file idf_history.h5
We can also save only calls to functions and design variables history:
scenario.save_optimization_history("idf_history.xml", file_format="ggobi")
Print optimization metrics#
scenario.print_execution_metrics()
INFO - 16:23:45: The discipline counters are disabled.
Plot the optimization history view#
scenario.post_process(post_name="OptHistoryView", save=False, show=True)



<gemseo.post.opt_history_view.OptHistoryView object at 0x7c2f7063a480>
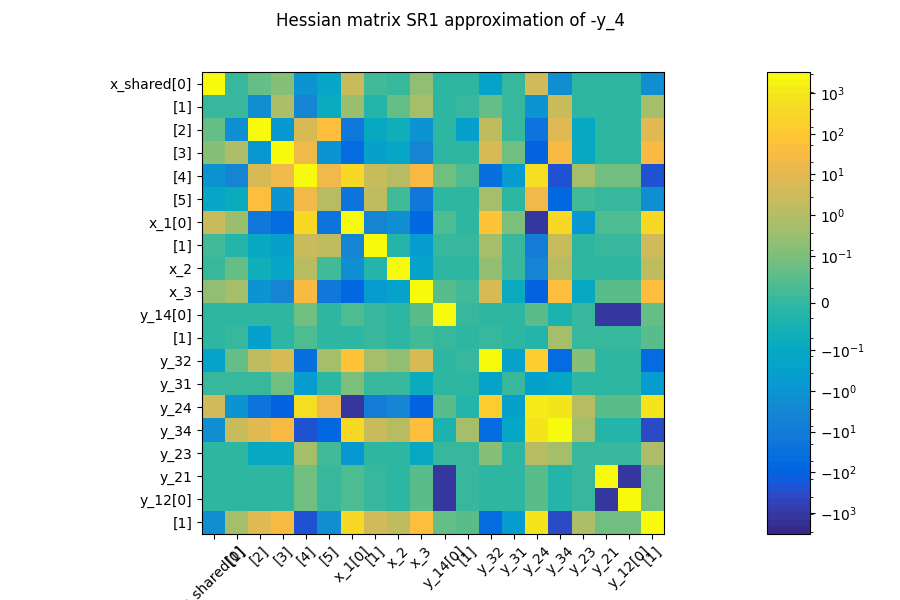
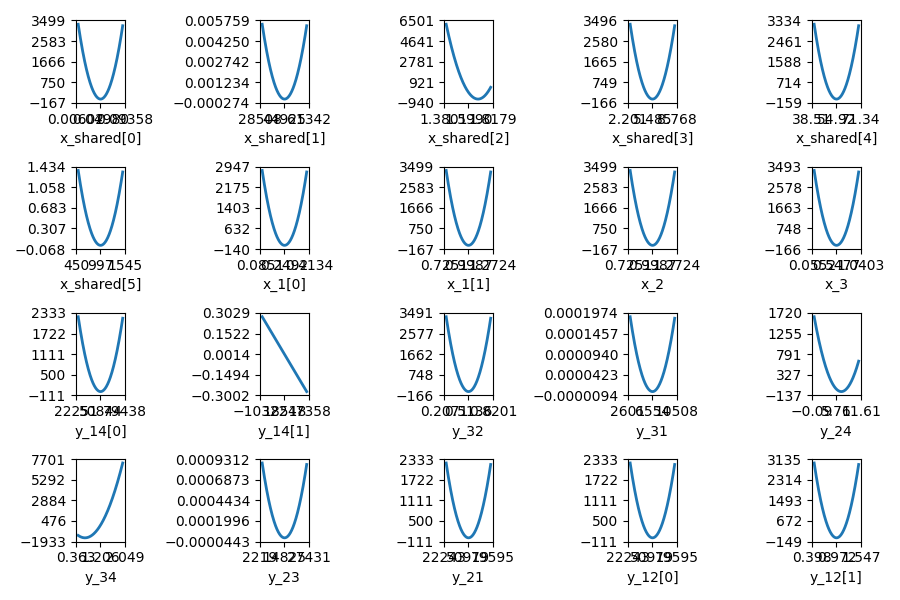
Plot the quadratic approximation of the objective#
scenario.post_process(post_name="QuadApprox", function="-y_4", save=False, show=True)


<gemseo.post.quad_approx.QuadApprox object at 0x7c2f7063a3f0>
Total running time of the script: (0 minutes 1.674 seconds)