Note
Go to the end to download the full example code.
Quadratic approximations#
In this example, we illustrate the use of the QuadApprox plot
on the Sobieski's SSBJ problem.
The QuadApprox post-processing performs a quadratic approximation of a given
function from an optimization history and provide two plots.
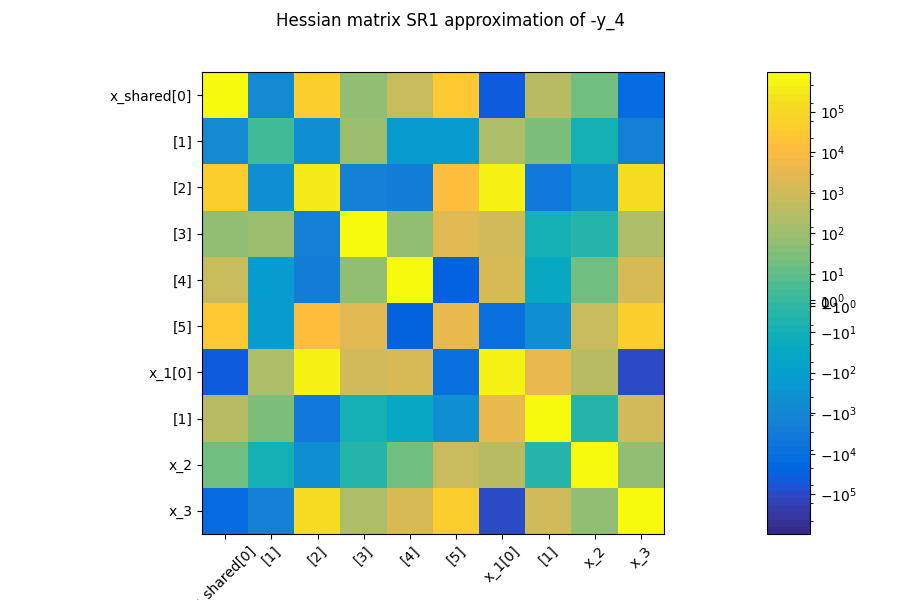
The first plot shows an approximation of the Hessian matrix \(\dfrac{\partial^2 f}{\partial x_i \partial x_j}\) based on the Symmetric Rank 1 method (SR1) [NW06]. The color map uses a symmetric logarithmic (symlog) scale. This plots the cross influence of the design variables on the objective function or constraints. For instance, on the last figure, the maximal second-order sensitivity is \(\dfrac{\partial^2 -y_4}{\partial^2 x_0} = 2.10^5\), which means that the \(x_0\) is the most influential variable. Then, the cross derivative \(\dfrac{\partial^2 -y_4}{\partial x_0 \partial x_2} = 5.10^4\) is positive and relatively high compared to the previous one but the combined effects of \(x_0\) and \(x_2\) are non-negligible in comparison.
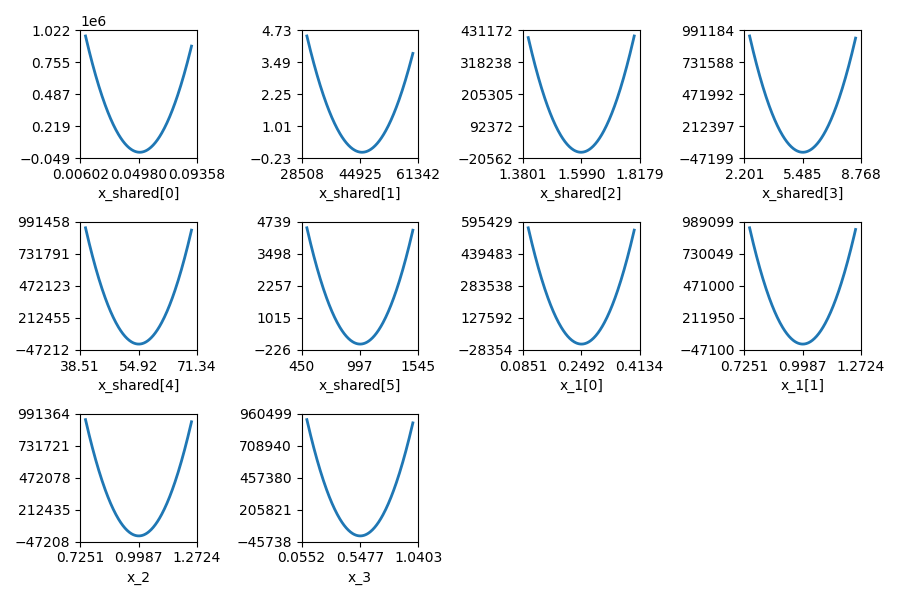
The second plot represents the quadratic approximation of the objective around the optimal solution : \(a_{i}(t)=0.5 (t-x^*_i)^2 \dfrac{\partial^2 f}{\partial x_i^2} + (t-x^*_i) \dfrac{\partial f}{\partial x_i} + f(x^*)\), where \(x^*\) is the optimal solution. This approximation highlights the sensitivity of the objective function with respect to the design variables: we notice that the design variables \(x\_1, x\_5, x\_6\) have little influence , whereas \(x\_0, x\_2, x\_9\) have a huge influence on the objective. This trend is also noted in the diagonal terms of the Hessian matrix \(\dfrac{\partial^2 f}{\partial x_i^2}\).
INFO - 16:12:35: Importing the optimization problem from the file sobieski_mdf_scenario.h5
<gemseo.post.quad_approx.QuadApprox object at 0x7c4bcf435580>
from __future__ import annotations
from gemseo import execute_post
from gemseo.settings.post import QuadApprox_Settings
execute_post(
"sobieski_mdf_scenario.h5",
settings_model=QuadApprox_Settings(function="-y_4", save=False, show=True),
)
Total running time of the script: (0 minutes 0.507 seconds)