Note
Go to the end to download the full example code.
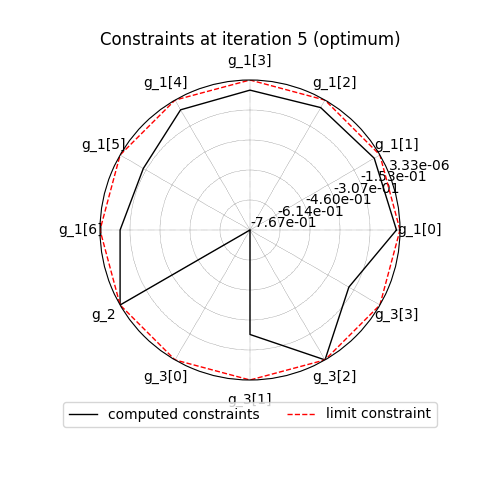
Radar chart#
In this example, we illustrate the use of the RadarChart post-processing
on the Sobieski's SSBJ problem.
The RadarChart post-processing plots the constraints functions specified by
the user, at a given iteration, on a radar style chart.
By default, the last iteration is used. This post-processing of the constraints scales
better with the number of constraints than the constraint plot provided by the
OptHistoryView.
INFO - 16:12:36: Importing the optimization problem from the file sobieski_mdf_scenario.h5
<gemseo.post.radar_chart.RadarChart object at 0x7c4bce352ab0>
from __future__ import annotations
from gemseo import execute_post
from gemseo.settings.post import RadarChart_Settings
execute_post(
"sobieski_mdf_scenario.h5",
settings_model=RadarChart_Settings(
constraint_names=["g_1", "g_2", "g_3"],
save=False,
show=True,
),
)
Total running time of the script: (0 minutes 0.163 seconds)