van_der_pol module¶
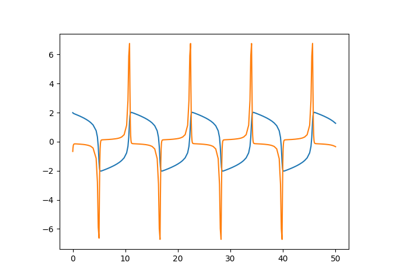
The Van der Pol (VDP) problem describing an oscillator with non-linear damping.
Van der Pol, B. & Van Der Mark, J. Frequency Demultiplication. Nature 120, 363–364 (1927).
The Van der Pol problem is written as follows:
where \(x(t)\) is the position coordinate as a function of time, and \(\mu\) is a scalar parameter indicating the stiffness.
This problem can be rewrittent in a 2-dimensional form with only first-order derivatives. Let \(y = \frac{dx}{dt}\) and \(s = \begin{pmatrix}x\\y\end{pmatrix}\). Then the Van der Pol problem is:
with
The jacobian of this function can be expressed analytically:
There is no exact solution to the Van der Pol oscillator problem in terms of known tabulated functions (see Panayotounakos et al. « On the Lack of Analytic Solutions of the Van Der Pol Oscillator ». ZAMM 83, nᵒ 9 (1 septembre 2003)).
- class gemseo.problems.ode.van_der_pol.VanDerPol(initial_time=0, final_time=0.5, mu=1000.0, use_jacobian=True, state_vector=None)[source]¶
Bases:
ODEProblemRepresentation of an oscillator with non-linear damping.
- Parameters:
mu (float) –
The stiffness parameter.
By default it is set to 1000.0.
initial_time (float) –
The start of the integration interval.
By default it is set to 0.
final_time (float) –
The end of the integration interval.
By default it is set to 0.5.
use_jacobian (bool) –
Whether to use the analytical expression of the Jacobian. If false, use finite differences to estimate the Jacobian.
By default it is set to True.
state_vector (NDArray[float]) – The state vector of the system.
- check()¶
Ensure the parameters of the problem are consistent.
- Raises:
ValueError – If the state and time shapes are inconsistent.
- Return type:
None
- check_jacobian(state_vector, approximation_mode=ApproximationMode.FINITE_DIFFERENCES, step=1e-06, error_max=1e-08)¶
Check if the analytical jacobian is correct.
Compare the value of the analytical jacobian to a finite-element approximation of the jacobian at user-specified points.
- Parameters:
state_vector (_SupportsArray[dtype[Any]] | _NestedSequence[_SupportsArray[dtype[Any]]] | bool | int | float | complex | str | bytes | _NestedSequence[bool | int | float | complex | str | bytes]) – The state vector at which the jacobian is checked.
approximation_mode (ApproximationMode) –
The approximation mode.
By default it is set to “finite_differences”.
step (float) –
The step used to approximate the gradients.
By default it is set to 1e-06.
error_max (float) –
The error threshold above which the jacobian is deemed to be incorrect.
By default it is set to 1e-08.
- Raises:
ValueError – Either if the approximation method is unknown, if the shapes of the analytical and approximated Jacobian matrices are inconsistent or if the analytical gradients are wrong.
- Returns:
Whether the jacobian is correct.
- Return type:
None
- jac: Callable[[NDArray[float], NDArray[float]], NDArray[float]]¶
The Jacobian function of the right-hand side of the ODE.
- property time_vector¶
The times at which the solution shall be evaluated.