van_der_pol module¶
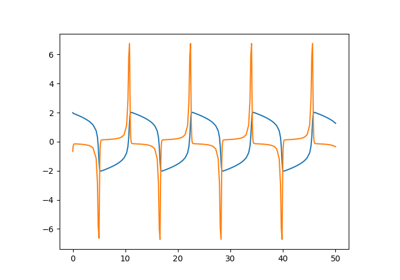
The Van der Pol (VDP) problem describing an oscillator with non-linear damping.
Van der Pol, B. & Van Der Mark, J. Frequency Demultiplication. Nature 120, 363-364 (1927).
The Van der Pol problem is written as follows:
where \(x(t)\) is the position coordinate as a function of time, and \(\mu\) is a scalar parameter indicating the stiffness.
This problem can be rewrittent in a 2-dimensional form with only first-order derivatives. Let \(y = \frac{dx}{dt}\) and \(s = \begin{pmatrix}x\\y\end{pmatrix}\). Then the Van der Pol problem is:
with
The jacobian of this function can be expressed analytically:
There is no exact solution to the Van der Pol oscillator problem in terms of known tabulated functions (see Panayotounakos et al., On the Lack of Analytic Solutions of the Van Der Pol Oscillator. ZAMM 83, nᵒ 9 (1 septembre 2003)).
- class gemseo.problems.ode.van_der_pol.VanDerPol(initial_time=0, final_time=0.5, mu=1000.0, use_jacobian=True, state_vector=None)[source]¶
Bases:
ODEProblemRepresentation of an oscillator with non-linear damping.
- Parameters:
mu (float) –
The stiffness parameter.
By default it is set to 1000.0.
initial_time (float) –
The start of the integration interval.
By default it is set to 0.
final_time (float) –
The end of the integration interval.
By default it is set to 0.5.
use_jacobian (bool) –
Whether to use the analytical expression of the Jacobian. If false, use finite differences to estimate the Jacobian.
By default it is set to True.
state_vector (NDArray[float]) – The state vector of the system.
- check()¶
Ensure the parameters of the problem are consistent.
- Raises:
ValueError – If the state and time shapes are inconsistent.
- Return type:
None
- check_jacobian(state_vector, approximation_mode=ApproximationMode.FINITE_DIFFERENCES, step=1e-06, error_max=1e-08)¶
Check if the analytical jacobian is correct.
Compare the value of the analytical jacobian to a finite-element approximation of the jacobian at user-specified points.
- Parameters:
state_vector (ArrayLike) – The state vector at which the jacobian is checked.
approximation_mode (ApproximationMode) –
The approximation mode.
By default it is set to “finite_differences”.
step (float) –
The step used to approximate the gradients.
By default it is set to 1e-06.
error_max (float) –
The error threshold above which the jacobian is deemed to be incorrect.
By default it is set to 1e-08.
- Raises:
ValueError – Either if the approximation method is unknown, if the shapes of the analytical and approximated Jacobian matrices are inconsistent or if the analytical gradients are wrong.
- Returns:
Whether the jacobian is correct.
- Return type:
None
- jac: Callable[[NDArray[float], NDArray[float]], NDArray[float]]¶
The Jacobian function of the right-hand side of the ODE.
- rhs_function: Callable[[NDArray[float], NDArray[float]], NDArray[float]]¶
The right-hand side of the ODE.
- property time_vector¶
The times at which the solution shall be evaluated.