poloni module¶
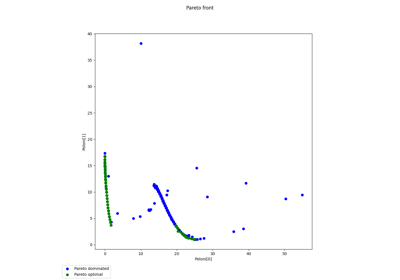
Poloni’s bi-objective optimization problem.
See [PGOP00].
- class gemseo.problems.multiobjective_optimization.poloni.Poloni[source]
Bases:
OptimizationProblemPoloni multi-objective, bound constrained optimization problem.
- Parameters:
design_space – The design space on which the functions are evaluated.
pb_type – The type of the optimization problem.
input_database – A database to initialize that of the optimization problem. If
None, the optimization problem starts from an empty database.differentiation_method – The default differentiation method to be applied to the functions of the optimization problem.
fd_step – The step to be used by the step-based differentiation methods.
parallel_differentiation – Whether to approximate the derivatives in
parallel. –
use_standardized_objective – Whether to use standardized objective for logging and post-processing.
hdf_node_path – The path of the HDF node from which the database should be imported. If empty, the root node is considered.
**parallel_differentiation_options – The options to approximate the derivatives in parallel.
- constraints: list[MDOFunction]
The constraints.
- current_iter: int
The current iteration.
- database: Database
The database to store the optimization problem data.
- design_space: DesignSpace
The design space on which the optimization problem is solved.
- eq_tolerance: float
The tolerance for the equality constraints.
- fd_step: float
The finite differences step.
- ineq_tolerance: float
The tolerance for the inequality constraints.
- max_iter: int
The maximum iteration.
- new_iter_observables: list[MDOFunction]
The observables to be called at each new iterate.
- nonproc_constraints: list[MDOFunction]
The non-processed constraints.
- nonproc_new_iter_observables: list[MDOFunction]
The non-processed observables to be called at each new iterate.
- nonproc_objective: MDOFunction
The non-processed objective function.
- nonproc_observables: list[MDOFunction]
The non-processed observables.
- observables: list[MDOFunction]
The observables.
- pb_type: ProblemType
The type of optimization problem.
- preprocess_options: dict
The options to pre-process the functions.
- solution: OptimizationResult | None
The solution of the optimization problem if solved; otherwise
None.
- stop_if_nan: bool
Whether the optimization stops when a function returns
NaN.
- use_standardized_objective: bool
Whether to use standardized objective for logging and post-processing.
The standardized objective corresponds to the original one expressed as a cost function to minimize. A
DriverLibraryworks with this standardized objective and theDatabasestores its values. However, for convenience, it may be more relevant to log the expression and the values of the original objective.
Examples using Poloni¶
Multi-objective Poloni example with the mNBI algorithm