Note
Go to the end to download the full example code.
Optimization History View#
In this example, we illustrate the use of the OptHistoryView post-processing
on the Sobieski's SSBJ problem.
The OptHistoryView post-processing creates a series of plots:
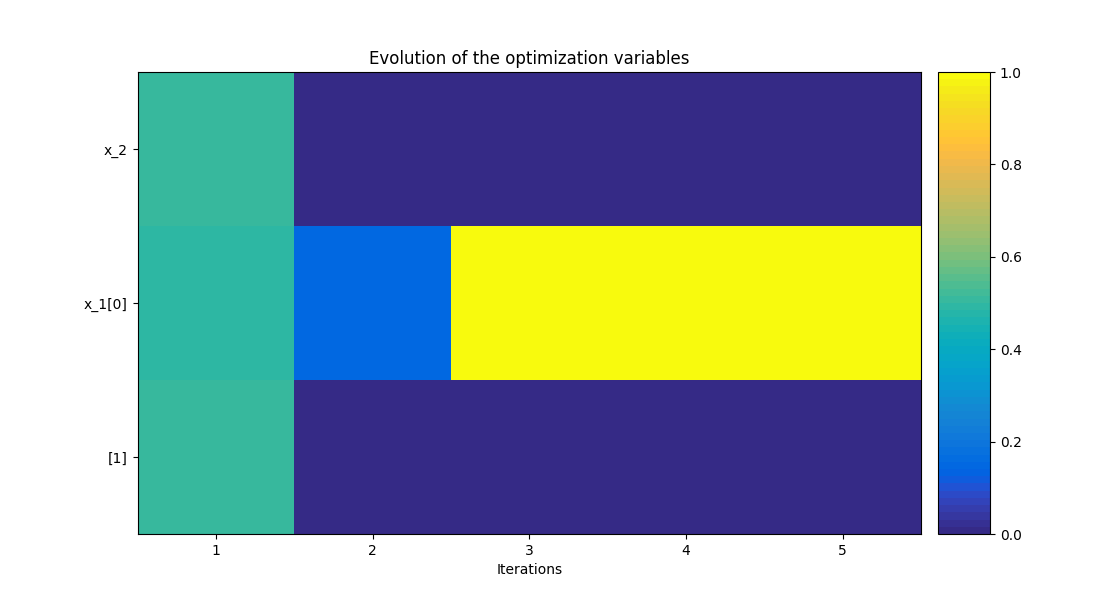
The design variables history: shows the normalized values of the design variables. On the \(y\) axis are the components of the design variables vector and on the \(x\) axis the iterations. The values are normalized between 0 and 1 and represented by colors.
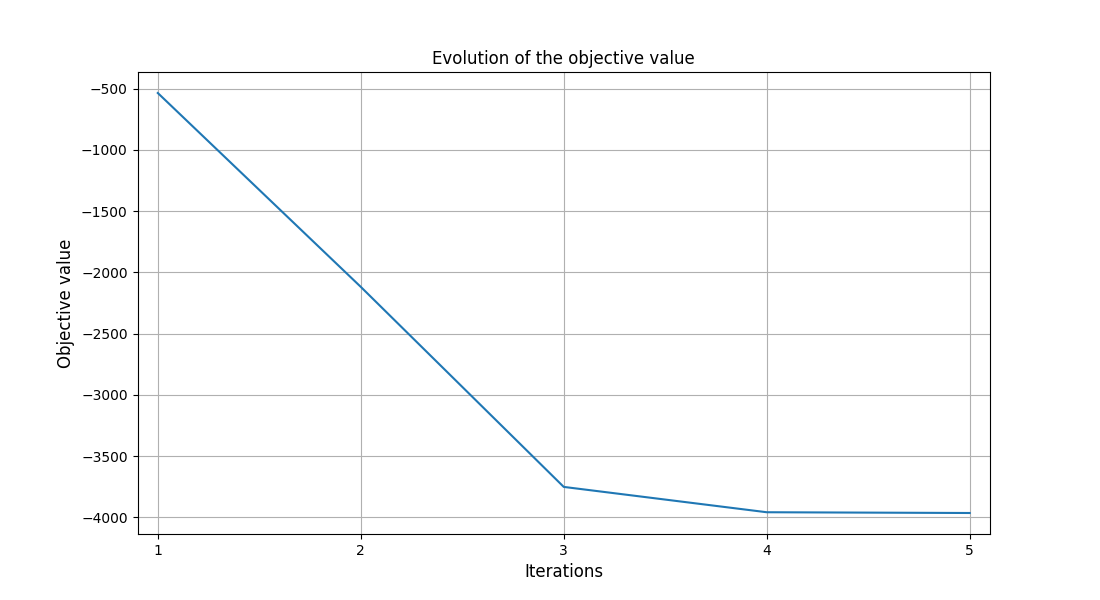
The objective function history: shows the evolution of the objective function value during the optimization.
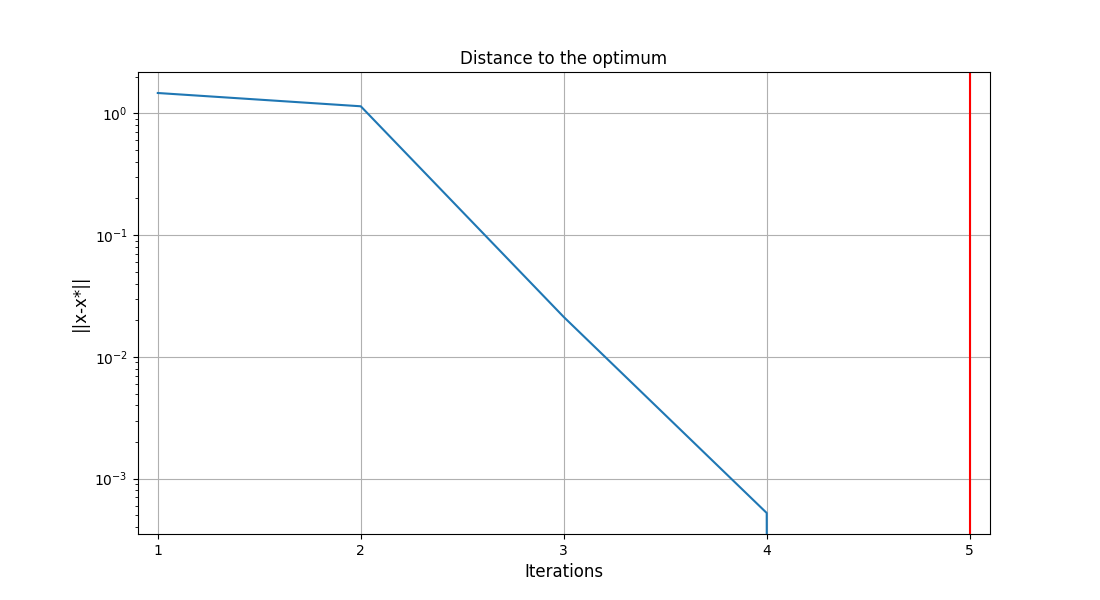
The distance to the best design variables: shows the Euclidean distance \(||x-x^*||_2\) between the different design variable vectors considered by the optimizer and the best one (in log scale).
The inequality constraint history: shows the evolution of the constraints values. On the \(y\) axis are the components of the constraints and on the \(x\) axis the iterations.The color indicates whether the constraint component is satisfied: red means violated, white means active and green means satisfied. For an IDF formulation, an additional plot is created to track the equality constraint history.
INFO - 16:12:32: Importing the optimization problem from the file sobieski_mdf_scenario.h5
<gemseo.post.opt_history_view.OptHistoryView object at 0x7c4bce7cff20>
from __future__ import annotations
from gemseo import execute_post
from gemseo.settings.post import OptHistoryView_Settings
execute_post(
"sobieski_mdf_scenario.h5",
settings_model=OptHistoryView_Settings(
variable_names=["x_1", "x_2"],
save=False,
show=True,
),
)
Total running time of the script: (0 minutes 0.463 seconds)